某電動(dòng)汽車(chē)扭力梁運(yùn)動(dòng)學(xué)性能仿真分析
2018-05-10 11:11:50湯國(guó)龍
建材與裝飾 2018年18期
湯國(guó)龍
1 前言
扭力梁式半獨(dú)立懸架作為中小型轎車(chē)的后懸架已經(jīng)成為汽車(chē)行業(yè)多年的共識(shí)。其兼具剛性軸式非獨(dú)立懸架與拖曳臂式獨(dú)立懸架的優(yōu)點(diǎn),且結(jié)構(gòu)簡(jiǎn)單,質(zhì)量較輕,便于拆裝。電動(dòng)轎車(chē)由于車(chē)身地板下要布置電池箱,要求懸架占用空間不能較大,為追求長(zhǎng)續(xù)航對(duì)扭力梁的縱臂長(zhǎng)度有嚴(yán)格限制。下文主要從整車(chē)的運(yùn)動(dòng)學(xué)性能等方面分析扭力梁縮短縱臂長(zhǎng)度的可行性。既要滿足整車(chē)對(duì)續(xù)航里程的要求,同時(shí)滿足底盤(pán)系統(tǒng)各性能目標(biāo)。
為了有效分析縱臂長(zhǎng)度縮短對(duì)整車(chē)性能的影響,本文從三個(gè)方案著手對(duì)不同縱臂長(zhǎng)度的扭力梁進(jìn)行整車(chē)運(yùn)動(dòng)學(xué)性能分析。三種方案在分析中采用相同的輪距和軸距參數(shù),其中輪胎模型均采用205/60R16的國(guó)標(biāo)型號(hào),以盡可能消除環(huán)境因素對(duì)分析的準(zhǔn)確性的影響。
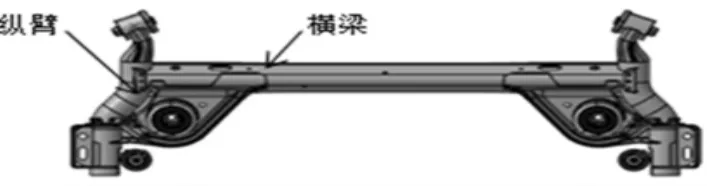
圖1 某電動(dòng)汽車(chē)扭力梁示意圖
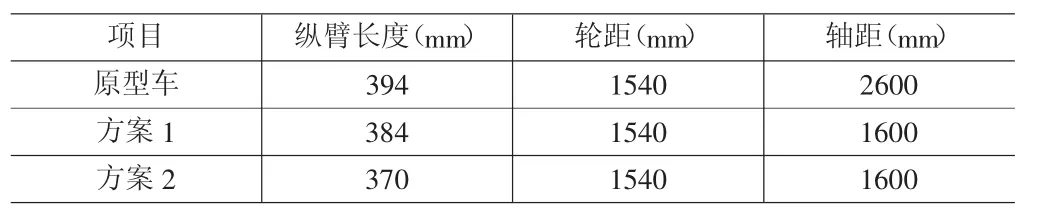
表1 原型車(chē)及兩個(gè)縱臂長(zhǎng)度方案
2 運(yùn)用Carsim進(jìn)行運(yùn)動(dòng)學(xué)性能分析
Carsim軟件是專(zhuān)門(mén)針對(duì)車(chē)輛動(dòng)力學(xué)的仿真軟件,是一款基于系統(tǒng)的建模軟件,在建模過(guò)程中需要車(chē)輛各個(gè)子系統(tǒng)的性能參數(shù)作為輸入。
本次分析根據(jù)海馬汽車(chē)操穩(wěn)企標(biāo)進(jìn)行分析,主要進(jìn)行穩(wěn)態(tài)回轉(zhuǎn)試驗(yàn)、蛇行試驗(yàn)、轉(zhuǎn)向回正試驗(yàn)、方向盤(pán)轉(zhuǎn)角階躍輸入試驗(yàn),所引用的標(biāo)準(zhǔn)為《汽車(chē)操縱穩(wěn)定性客觀試驗(yàn)規(guī)范》(Q/HMA 6171-2017)。
2.1 穩(wěn)態(tài)回轉(zhuǎn)試驗(yàn)
經(jīng)仿真分析輸出表2可知,由于質(zhì)心降低,車(chē)身側(cè)傾度降低,在轉(zhuǎn)向時(shí)側(cè)傾角減小。方案1和方案2車(chē)身側(cè)傾度相差不大。方案1不足轉(zhuǎn)向度降低;方案2的0.5g側(cè)向加速度時(shí)不足轉(zhuǎn)向度降低。
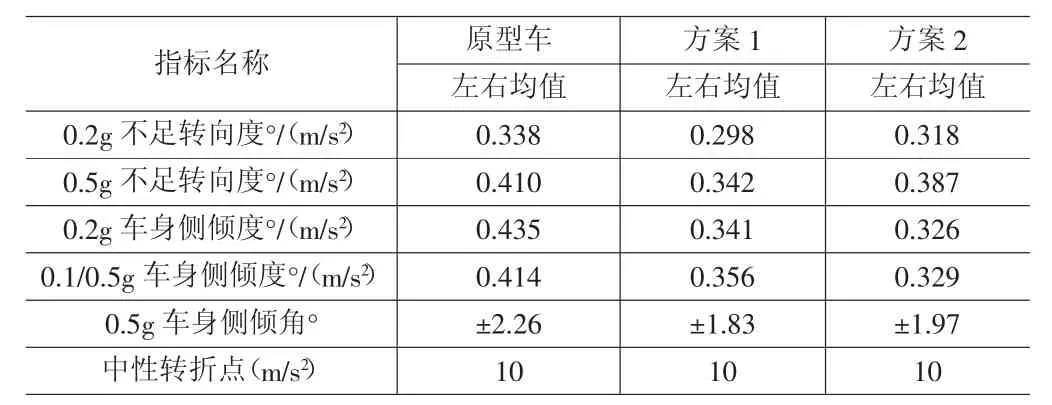
表2 穩(wěn)態(tài)回轉(zhuǎn)試驗(yàn)仿真結(jié)果
2.2 蛇行試驗(yàn)
經(jīng)仿真分析輸出表3可知,在相同的軌跡控制下,方案1和方案2側(cè)向加速度、橫擺角速度隨車(chē)速的變化情況基本一致。由于質(zhì)心高度變化,車(chē)身側(cè)傾角大幅減小。根據(jù)穩(wěn)態(tài)回轉(zhuǎn)分析結(jié)果,原型車(chē)不足轉(zhuǎn)向度>方案2>方案1,通過(guò)同樣軌跡曲線時(shí)需要的方向盤(pán)轉(zhuǎn)角原型車(chē)>方案2>電動(dòng)車(chē)方案1。
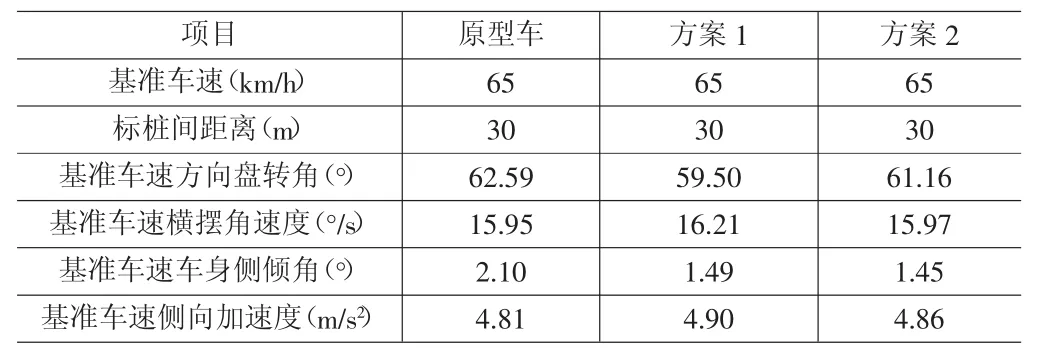
表3 蛇形試驗(yàn)仿真結(jié)果
2.3 轉(zhuǎn)向回正性能試驗(yàn)
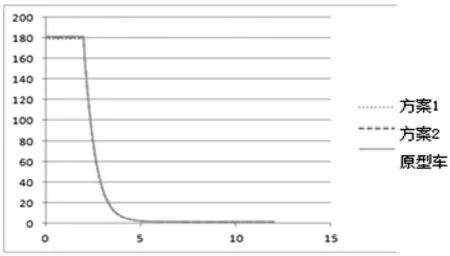
圖2 低速回正左轉(zhuǎn)轉(zhuǎn)向盤(pán)轉(zhuǎn)角時(shí)間歷程曲線
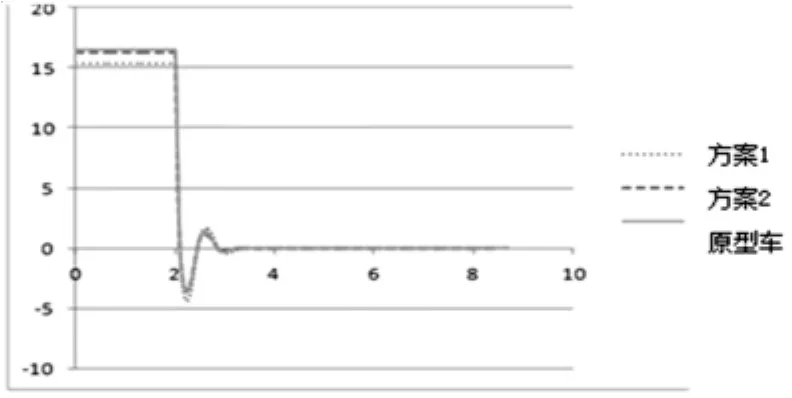
圖3 高速回正左轉(zhuǎn)轉(zhuǎn)向盤(pán)轉(zhuǎn)角時(shí)間歷程曲線
從以上回正性能分析結(jié)果可以看出,低速回正方面,方案1、2相對(duì)于原型車(chē)回正時(shí)間減小,殘留橫擺角速度變小,回正性能變好。高速回正方面,方案1回正速度和原型車(chē)相差不大;車(chē)身側(cè)傾角超調(diào)量減小,方向盤(pán)轉(zhuǎn)角、橫擺角速度、側(cè)向加速度超調(diào)量增大;橫擺角速度、側(cè)向加速度衰減率增大,車(chē)身側(cè)傾角、轉(zhuǎn)向盤(pán)轉(zhuǎn)角衰減率減小。方案2回正速度和原型車(chē)相差不大,且車(chē)身側(cè)傾角、方向盤(pán)轉(zhuǎn)角、橫擺角速度、側(cè)向加速度超調(diào)量減小;車(chē)身側(cè)傾角衰減率減小,橫擺角速度、側(cè)向加速度、轉(zhuǎn)向盤(pán)轉(zhuǎn)角衰減率增大。方案1橫擺角速度自然頻率與原型車(chē)一致,方案2橫擺角速度自然頻率大于原型車(chē)。
3 結(jié)論
本文以某款純電動(dòng)轎車(chē)后扭力梁為例,根據(jù)整車(chē)?yán)m(xù)航里程的不同需求,結(jié)合扭力梁的結(jié)構(gòu)形式和性能,運(yùn)用Carsim軟件進(jìn)行性能仿真分析,進(jìn)行結(jié)構(gòu)和性能的匹配與選擇,以滿足整車(chē)開(kāi)發(fā)的需求,根據(jù)分析結(jié)果,形成如下結(jié)論:
(1)穩(wěn)態(tài)回轉(zhuǎn)試驗(yàn)中,方案1不足轉(zhuǎn)向度降低。方案2的0.2g側(cè)向加速度時(shí)不足轉(zhuǎn)向度和原型車(chē)相差不大,0.5g側(cè)向加速度時(shí)不足轉(zhuǎn)向度降低。
(2)由于不足轉(zhuǎn)向度的變化,通過(guò)蛇行標(biāo)樁區(qū)需要的方向盤(pán)轉(zhuǎn)角原型車(chē)>方案2>方案1。方案1橫擺角速度自然頻率與原型車(chē)一致,方案2橫擺角速度自然頻率大于原型車(chē)。
(3)轉(zhuǎn)向盤(pán)轉(zhuǎn)角階躍試驗(yàn)中,方案1橫擺角速度、側(cè)向加速度、車(chē)身側(cè)傾角響應(yīng)時(shí)間增加,響應(yīng)速度變慢;橫擺角速度、側(cè)向加速度超調(diào)量減小、車(chē)身側(cè)傾角超調(diào)量增大。方案2響應(yīng)速度和原型車(chē)大致相同;橫擺角速度、側(cè)向加速度、車(chē)身側(cè)傾角超調(diào)量減小。
[1]《汽車(chē)操縱穩(wěn)定性客觀試驗(yàn)規(guī)范》(Q/HMA6171-2017).
[2]余志生.汽車(chē)?yán)碚摚ǖ?版).機(jī)械工業(yè)出版社.
[3]晏娟,劉仁鑫,侯軍鋒,朱金和.扭力梁式后懸架強(qiáng)度分析[J].制造業(yè)信息化,2014(6).