區(qū)間化時變時延的遙操作系統(tǒng)建模與控制
2018-05-08 13:20:44劉義才張紅霞陳鑫
電子技術與軟件工程 2018年22期
劉義才 張紅霞 陳鑫
摘要 針對力反饋遙操作系統(tǒng)中的時延問題,首先將利用狀態(tài)空間方程建立了遙操作系統(tǒng)動力學模型,進而在時延區(qū)間劃方法以及reciprocally方法的基礎上采用時滯系統(tǒng)分析和魯棒H o。控制方法獲得了系統(tǒng)保守性較小的穩(wěn)定性和同步控制的條件。最后通過數(shù)值仿真驗證了本文所提方法的有效性。
【關鍵詞】控制系統(tǒng) 時延 建模
1 引言
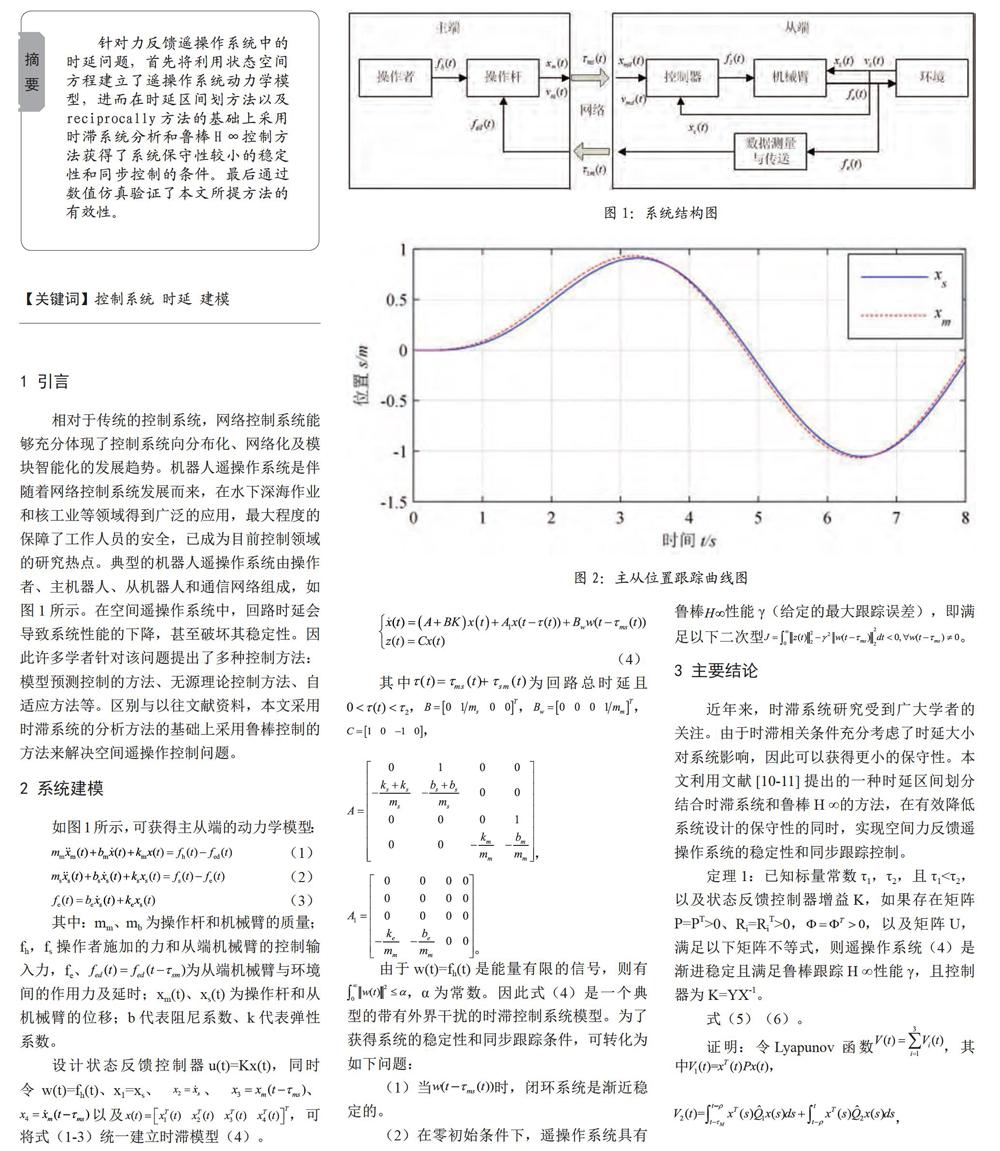
相對于傳統(tǒng)的控制系統(tǒng),網(wǎng)絡控制系統(tǒng)能夠充分體現(xiàn)了控制系統(tǒng)向分布化、網(wǎng)絡化及模塊智能化的發(fā)展趨勢。機器人遙操作系統(tǒng)是伴隨著網(wǎng)絡控制系統(tǒng)發(fā)展而來,在水下深海作業(yè)和核工業(yè)等領域得到廣泛的應用,最大程度的保障了工作人員的安全,己成為目前控制領域的研究熱點。典型的機器人遙操作系統(tǒng)由操作者、主機器人、從機器人和通信網(wǎng)絡組成,如圖1所示。在空間遙操作系統(tǒng)中,回路時延會導致系統(tǒng)性能的下降,甚至破壞其穩(wěn)定性。因此許多學者針對該問題提出了多種控制方法:模型預測控制的方法、無源理論控制方法、自適應方法等。區(qū)別與以往文獻資料,本文采用時滯系統(tǒng)的分析方法的基礎上采用魯棒控制的方法來解決空間遙操作控制問題。
2 系統(tǒng)建模
3 主要結論
近年來,時滯系統(tǒng)研究受到廣大學者的關注。由于時滯相關條件充分考慮了時延大小對系統(tǒng)影響,因此可以獲得更小的保守性。本文利用文獻[10-11]提出的一種時延區(qū)間劃分結合時滯系統(tǒng)和魯棒H∞的方法,在有效降低系統(tǒng)設計的保守性的同時,實現(xiàn)空間力反饋遙操作系統(tǒng)的穩(wěn)定性和同步跟蹤控制。
5 結論
針對力反饋空間遙操作系統(tǒng)的時變時延,本文采用時滯系統(tǒng)及魯棒H。。控制方法,獲得了統(tǒng)漸近穩(wěn)定且滿足給定跟蹤性能的充分條件。由于利用了區(qū)間化時變時延的方法,將時變時延在整個區(qū)間范圍內(nèi)變化問題轉化為在多個小區(qū)間范圍內(nèi)變化問題,可獲得較小的系統(tǒng)保守性。最后通過數(shù)值示例仿真驗證了本文所提方法的有效性。
參考文獻
[1]Zhang D, Shi P, Wang Q G, et al.Analysis and svnthesis of networkedcontrol systems: a survey of recentadvances and challenges [J]. ISATransactions, 2017, 66: 376-392.
[2]劉于之,李木國,杜海,具有時延和丟包的NCS魯棒H∞控制[J].控制與決策,2014 (03):517-522.
[3]閻偉萍,網(wǎng)絡遙操作機器人系統(tǒng)的研究[D].哈爾濱哈爾濱工業(yè)大學,2010.
[4]李君,劉斌,蔣崢,基于時延灰色預測的網(wǎng)絡機器人網(wǎng)絡預測控制[J].計算機仿真.2016,33 (01):331-335.
[5] Hua C, Yang Y, Liu P X. Output-Feedback Adaptive Control ofNetworked Teleoperation System WithTime-Varying Delay and BoundedInputs [J]. IEEE/ASME Transactions onMechatronics,
2015, 20 (05): 2009-2020.
[6] Yang Y, Yang F, Hua J, et al.Generalized predictive control forspace teleoperation systems withlong time-varying delays [C]. Systems,Man,
and Cybernet ics
(SMC), 2012
IEEEInternat ional
Conference
on
IEEE.2012:3057-3062.
[7]宋愛國,黃惟一.空間遙控作業(yè)系統(tǒng)的自適應無源控制[J].宇航學報,1997,18 (03):26-32.
[8] Forouzantabar A, Talebi H A, SedighA K. Adaptive neural network controlof bilateral teleoperation Withconstant time delay [J]. NonlinearDynamics, 2012, 67 (02): 1123-1134.
[9]劉斌,劉義才.區(qū)間化時變時延的網(wǎng)絡化切換系統(tǒng)建模與控制[J].控制理論與應用,2017, 34 (07): 912-920.
[10]張俊,羅大庸,孫妙平.一種基于時滯區(qū)間不均分方法的變時延網(wǎng)絡控制系統(tǒng)的新穩(wěn)定性條件[J],電子學報,2016, 44 (01):54-59.
[11] Zeng H B, He Y, Wu M, et al.Complete Delay-Decomposing Approachto Asymptotic Stability for NeuralNetworks With Time-Varying Delays [Jl.IEEE Transact ions on Neural Networks,2011, 22 (05):806-812.
[12] Yang D, Chen H, Xing G, et al.Networked H∞synchronization ofbilateral teleportation systems [Cl.Intelligent
Control
and Automat ion(WCICA),2014 llth World Congresson. IEEE, 2014: 3771-3774.
[13] Du H. Brief paper-H state-feedbackcontrol of bilateral teleportationsys tems with asymmetric time-varyingdelays [Jl. IET Control Theory &Applications, 2013,7 (04): 594-605.
[14]楊艷華,陽方平,化建寧等,基于線性矩陣不等式空間遙操作系統(tǒng)的魯棒H。。控制[J].機械工程學報,2013, 49 (11):1-7.
