基于MCU的球動(dòng)式平衡機(jī)器人
2018-05-08 13:20:44陳天海劉宇森鄭冰欣
電子技術(shù)與軟件工程 2018年22期
陳天海 劉宇森 鄭冰欣

摘要 目前可移動(dòng)的輪式機(jī)器人由于受到運(yùn)動(dòng)方向的限制,無(wú)法在小范圍內(nèi)實(shí)現(xiàn)全向移動(dòng),因此出現(xiàn)了球動(dòng)式平衡機(jī)器人。本文通過(guò)硬件機(jī)械結(jié)構(gòu),傳感器數(shù)據(jù)采集和處理,控制算法程序設(shè)計(jì)等方面進(jìn)行研究。
【關(guān)鍵詞】球動(dòng)式平衡機(jī)器人 姿態(tài)控制 PID算法STM32
1 引言
現(xiàn)代社會(huì)的科技水平不斷提高,機(jī)器人作為科技發(fā)展的產(chǎn)物,在實(shí)際應(yīng)用中極大地提高了生產(chǎn)效率,現(xiàn)在越來(lái)越普遍的應(yīng)用的社會(huì)生活的各個(gè)方面。
球動(dòng)式平衡機(jī)器人作為輪式機(jī)器人的一種,通過(guò)驅(qū)動(dòng)電機(jī)的運(yùn)轉(zhuǎn),球體作為驅(qū)動(dòng)輪在平面上移動(dòng)。由于球體具有全向移動(dòng)的特性,使用此結(jié)構(gòu)可以實(shí)現(xiàn)機(jī)器人的全方位移動(dòng),在工作范圍極小的空間中也可以靈活運(yùn)動(dòng)。
2 系統(tǒng)原理
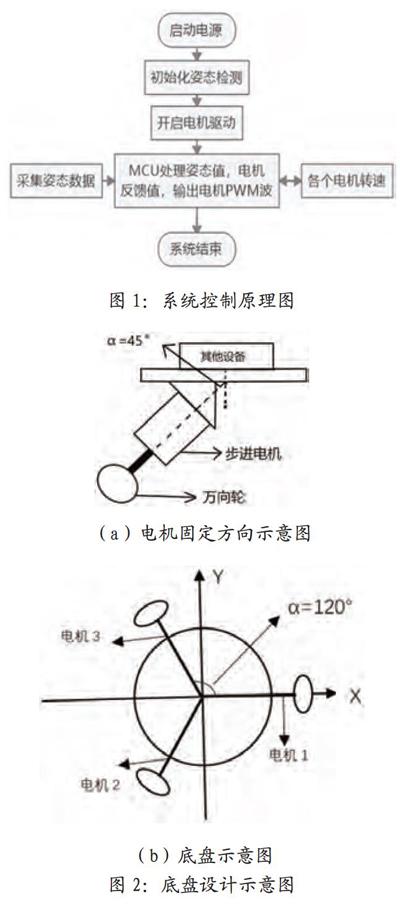
基于MCU的球動(dòng)式平衡機(jī)器人主要由姿態(tài)檢測(cè)部分,驅(qū)動(dòng)模塊,控制中心等組成。工作狀態(tài)下,將機(jī)器人放在平地上,初始化姿態(tài)檢測(cè)傳感器,待姿態(tài)檢測(cè)初始化完成,開(kāi)啟電機(jī)驅(qū)動(dòng),機(jī)器人開(kāi)始運(yùn)行,自此后整個(gè)過(guò)程中不斷采集姿態(tài)狀態(tài),控制機(jī)器人運(yùn)動(dòng)。系統(tǒng)原理如圖1所示。
3 系統(tǒng)硬件設(shè)計(jì)
3.1 控制中心
微控制單元(MCU)集成內(nèi)存、計(jì)數(shù)器、A/D轉(zhuǎn)換、UART、DMA等接口,在不同的使用場(chǎng)合設(shè)計(jì)出不同的控制組合。STM32系列芯片是專為嵌入式應(yīng)用而設(shè)計(jì),使用了ARM公司的高性能”Cortex-M3”內(nèi)核,lμs的雙12位ADC,4兆位/秒的UART,18兆位/秒的SPI,18MHz的I/O翻轉(zhuǎn)速度,低功耗設(shè)計(jì)可以達(dá)到在72MHz時(shí)消耗36mA(所有外設(shè)處于工作狀態(tài)),待機(jī)時(shí)下降到2μA。為了使用最佳的控制方案,系統(tǒng)使用STM32F407VET6作為控制中心。
3.2 電機(jī)及驅(qū)動(dòng)系統(tǒng)
目前設(shè)計(jì)應(yīng)用的主流驅(qū)動(dòng)電機(jī)是直流電機(jī)和步進(jìn)電機(jī),直流電機(jī)通常采用連續(xù)移動(dòng)的控制方式,而步進(jìn)電機(jī)是以步階方式分段移動(dòng)。為了更好的控制機(jī)器人,驅(qū)動(dòng)控制系統(tǒng)采用MG42L1步進(jìn)電機(jī)和路LV873IV步進(jìn)電機(jī)驅(qū)動(dòng)模塊。MG42L1步進(jìn)電機(jī)適用電壓12-25.2V,電感/相:3.2mH,靜力矩:3.6Kg-cm,轉(zhuǎn)動(dòng)慣量:35g-cm,電機(jī)重量292.lg。LV873IV步進(jìn)電機(jī)驅(qū)動(dòng)單路典型最大電流2.5A,典型值2A。
3.3 姿態(tài)檢測(cè)系統(tǒng)
為了精確獲取機(jī)器人的姿態(tài)信息,該機(jī)器人使用融合3軸加速度計(jì)和三軸陀螺儀傳感器的六軸姿態(tài)傳感器MPU6050作為姿態(tài)檢測(cè)傳設(shè)備,具體參數(shù)見(jiàn)表1。
3.4 底盤(pán)設(shè)計(jì)
機(jī)器人底盤(pán)上安裝驅(qū)動(dòng)模塊,步進(jìn)電機(jī),QL萬(wàn)向輪以及所有的控制中心,檢測(cè)模塊等。在實(shí)際的機(jī)器人運(yùn)動(dòng)模型中是通過(guò)萬(wàn)向輪的轉(zhuǎn)動(dòng)來(lái)帶動(dòng)球體運(yùn)動(dòng),所以萬(wàn)向輪的位置是影響機(jī)器人的整體性能的重要因素。底盤(pán)安裝示意圖如圖2所示。
4 系統(tǒng)軟件設(shè)計(jì)
4.1 確立相對(duì)空間坐標(biāo)系
機(jī)器人的平衡過(guò)程中需要獲得整體的姿態(tài)信息,而整體的姿態(tài)信息是建立在相對(duì)空間位置中的。相對(duì)坐標(biāo)系的確立需要三個(gè)參數(shù):俯仰角(Pitch)、航偏角(Yaw)、翻滾角(RoII),這三個(gè)參數(shù)的定義如下:
(1)俯仰角0:載體縱軸與縱向水平軸之間的夾角,向上為正,向下為負(fù)。
(2)橫滾角γ:載體縱向?qū)ΨQ面與縱向鉛垂面之間的夾角,橫滾角從鉛垂面算起,右傾為正,左傾為負(fù)。
(3)偏航角ψ:載體縱軸在水平面上的投影與地理子午線之間的夾角,偏航角數(shù)值以地理北向?yàn)槠瘘c(diǎn)沿逆時(shí)針?lè)较驗(yàn)檎?/p>
在機(jī)器人初始化的過(guò)程中用以上三個(gè)參數(shù)確立機(jī)器人所處位置的相對(duì)空間坐標(biāo)系。
4.2 數(shù)值濾波
使用簡(jiǎn)易卡爾曼濾波對(duì)得到數(shù)值進(jìn)行處理:
X[i+l]-(l-K[i+ll)x[i]+K[i+1]*z[i+1]
x即估計(jì)值,z即測(cè)量值。
K[i+1]=(P[i]+Q)/(P[i]+Q+R)
P是上一次估計(jì)值的方差,Q是高斯噪聲的方差,R是測(cè)量值的方差,Q和R都是常數(shù)。
P[i+1]=(1一K[i+1])P[i]
這一次的方差由上一次的方差和這次的增益系數(shù)決定
4.3 速度PID控制
建立如下速度模型對(duì)機(jī)器人的平衡進(jìn)行控制:
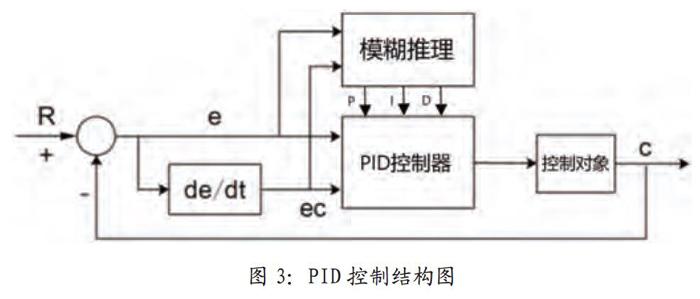
PID控制器結(jié)構(gòu)簡(jiǎn)單、穩(wěn)定性好、可靠性高,因此作為工業(yè)控制中應(yīng)用最為廣泛最基本的控制方法。但是在實(shí)際應(yīng)用中需要根據(jù)具體的結(jié)構(gòu)情況更改參數(shù)。PID控制結(jié)構(gòu)圖如圖3所示。
5 結(jié)束語(yǔ)
在此機(jī)器人設(shè)計(jì)過(guò)程中出現(xiàn)了很多問(wèn)題,最開(kāi)始的機(jī)械結(jié)構(gòu)設(shè)計(jì)不合理,后來(lái)反復(fù)修改才得到最終的結(jié)構(gòu),調(diào)試過(guò)程中對(duì)數(shù)據(jù)的處理不夠,沒(méi)有利用Matlab等軟件對(duì)程序進(jìn)行仿真,這些問(wèn)題值得在后面的研究設(shè)計(jì)中解決。
本設(shè)計(jì)通過(guò)濾波算法對(duì)傳感器采集的數(shù)據(jù)進(jìn)行處理,結(jié)合電機(jī)的速度反饋值,以機(jī)器人自平衡算法和PID控制算法構(gòu)成平衡系統(tǒng)核心,從而實(shí)現(xiàn)機(jī)器人的自平衡。該機(jī)器人在硬件設(shè)計(jì)方面獨(dú)具創(chuàng)新,體積小,結(jié)構(gòu)合理,性能穩(wěn)定,質(zhì)量較小,成本較低等特點(diǎn)。由于該機(jī)器人獨(dú)特的運(yùn)動(dòng)方式,尤其適用于空間結(jié)構(gòu)較小的工作空間,市場(chǎng)應(yīng)用價(jià)值較高。
參考文獻(xiàn)
[1]張少昆,單球輪移動(dòng)機(jī)器人控制方法的研究[D].北京:北京科技大學(xué),2013.
[2]朱磊磊,輪式移動(dòng)機(jī)器人研究綜述[J].機(jī)床與液壓,2009,37 (08):142-246.
[3]陳小磊,魏世民,于秀麗,獨(dú)輪車(chē)機(jī)器人的發(fā)展和技術(shù)研究[J].機(jī)電產(chǎn)品開(kāi)發(fā)與創(chuàng)新,2010 (23):6-14.
[4]韋巍,何衍,智能控制基礎(chǔ)[M],北京:清華大學(xué)出版社,2008.
