基于模糊免疫PID算法的施肥營養(yǎng)液pH值調節(jié)
2018-05-08 06:28:30牛海霞
江蘇農業(yè)學報 2018年2期
關鍵詞:模型
劉 玲, 牛海霞
(內蒙古機電職業(yè)技術學院,內蒙古 呼和浩特 010070)
肥液pH值調節(jié)控制是肥料生產行業(yè)中的一個研究熱點。目前研究主要集中在酸堿中和過程模型研究以及pH值控制兩個方向。
pH中和過程模型可以用全混合厭氧反應器(Continuous stirred tank reactor,CSTR)模型來表示。Niu[1]通過設定一個變量,該變量是與中和過程相關的強酸變量,通過使用該變量將酸堿中和過程非線性問題線性化。Galán[2]提出酸和堿性質不同會導致中和時滴定特征曲線區(qū)別很大,并且發(fā)現在相同實驗條件下弱酸在中和過程中所需的滴定量要大于強酸。董全成等[3]提出了反應不變量的中和過程模型,該模型則是基于電離平衡理論的。除了上述關于酸堿中和的機理模型研究外,國內外學者還研究了基于機理模型的pH值控制算法,比如景興紅等[4]提出的逆模型pH值控制算法,何青海[5]提出的基于內模控制算法的pH值控制器設計等。李加念[6]在中和反應系統(tǒng)中采用了多線性模型切換的方式,利用模糊算法進行模型切換來解決肥液pH調節(jié)過程中的非線性問題。魏正英[7]采用類似方法,將pH值調節(jié)過程模型中分為若干子模型,通過擬合的方式構建成誤差較小的子模型,以此實現準確的pH值控制。
pH值調節(jié)存在過程模型建模困難以及pH值控制非線性問題,針對這類問題,本試驗設計了基于模糊免疫PID算法的施肥營養(yǎng)液pH值調節(jié)控制系統(tǒng)。
1 施肥液pH值控制系統(tǒng)總體設計
1.1 系統(tǒng)設計
整個肥液pH值調節(jié)平臺設計框圖如圖1所示,整個系統(tǒng)一共有3個輸入口,分別為酸液輸入口、肥料液輸入口、灌溉水輸入口。3個輸入口將對應物料輸送至混合罐進行混合反應。輸出口輸出的是混合反應后的肥液,該肥液經過加壓施肥泵傳送至田間管路對農作物進行施肥。酸液需要經過過濾器、粗調閥,文丘里后注入到混合罐中,管路中的粗調閥負責調節(jié)當前酸液物料的流量。快速調節(jié)閥則是由控制器控制,控制物料流速,流量計負責記錄當前物料的流量。本系統(tǒng)使用了2個pH傳感器負責檢測混合后的肥液pH值。2個傳感器分別采集數據,計算差值,根據差值的大小判斷數據是否有效,如果差值相近,則采用平均值作為有效數據。
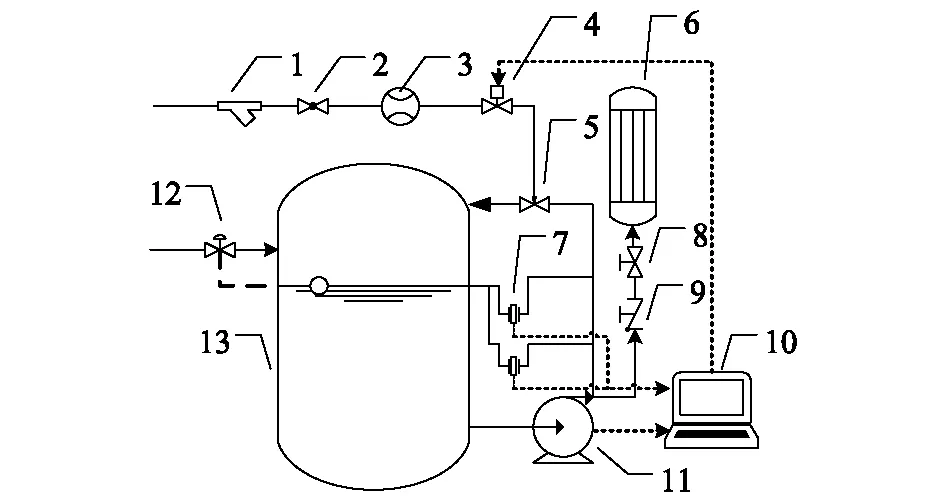
圖中標號1為酸液過濾器;標號2為酸液粗調閥;標號3為酸液流量計;標號4為高速電磁閥;標號5為文丘里;標號6為肥液罐;標號7為肥液pH值測量傳感器;標號8為灌溉設備的控制閥;標號9為肥液止回閥;標號10為上位機;標號11為電機泵;標號12為隔膜閥;標號13為肥液混合罐。圖1 肥液pH值控制系統(tǒng)結構件框圖Fig.1 Schematic diagram of pH control system
1.2 pH值控制動態(tài)數學模型
pH調節(jié)過程可視為是強酸和弱堿的混合反應。董全成[3]對pH值中和反應進行了模型描述,該模型由兩個方程構成,一個是負責描述pH值變化的動態(tài)方程,另外一個是中和滴定的靜態(tài)pH值方程。
pH值調節(jié)過程可以通過公式(1)表示:
(1)
式中Fout=Fn+Fw+u,V為混合肥液的體積;u為酸液從輸入口輸入的流量;Ca為酸液的物料濃度;Fn為水肥肥液的流量;Cn水肥肥液的濃度;Fw為灌溉水通過管路的流量;Cw為灌溉水對應的濃度;x1和x2分別為輸出管路中對應酸濃度和減濃度。
滴定的pH動態(tài)方程通過式(2)表示:
(2)
式中pH=-lg[H+];PKb=-lgKb;Kb為弱堿液電離參數;
1.3 控制系統(tǒng)設計
施肥營養(yǎng)液pH值調節(jié)系統(tǒng)的硬件設計框圖如圖2所示。整個系統(tǒng)的核心微控制器采用ST意法半導體公司的32位STM32F104單片機。pH傳感器負責采集混合罐中物料pH值,經過濾波處理后通過AD接口傳送至微控制器STM32F104。溫度傳感器負責記錄當前混合罐內溫度,這樣可以根據當前溫度值對pH值進行溫度補償。當pH值與肥液配方中的目標值相差較大時,微控制器可以通過PWM信號控制快速電磁閥來調節(jié)酸液流入混合罐中的速度。人機交互界面負責顯示當前混合罐中肥液的pH值、酸液流速、施肥泵開啟情況、溫度等信息,同時管理員可以通過人機交互界面修改肥液配方中pH目標值。

圖2 變量施肥控制系統(tǒng)框圖Fig.2 Architecture of variable rate fertilization control system
pH傳感器主要是采用美國Global Water公司的WQ201,通過檢測肥液中氫離子濃度,并轉換為電信號。pH傳感器傳輸的信號經過傳感器濾波電路進行噪聲抑制,并將信號進行轉換使之符合微控制器AD接口的電壓范圍。濾波電路如圖3所示。

圖3 傳感器濾波電路設計Fig.3 Circuit of sensor filter
控制酸液流速的快速電磁閥需要微控制器PWM信號來驅動,但是由于快速電磁閥需要2A左右的驅動電流,微控制器自身電流輸出為10 mA左右,因此需要在快速電磁閥和單片機之間增加電流驅動電路,電路設計如圖4所示。驅動芯片采用UL2102,該芯片能夠保證足夠的驅動電壓和電流,且開關頻率達到10 MHz,滿足流速調節(jié)的需求。
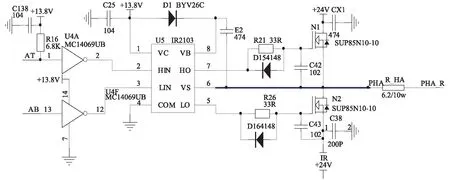
圖4 快速電磁閥驅動電路設計Fig.4 Design of drive circuit for high-speed solenoid value
2 模糊免疫PID控制原理
2.1 免疫算法原理
免疫算法來源于人體免疫原理,人體免疫是針對于外部生物性干擾而進行的防御措施。人體內的抗體和抗原相結合,從而使得抗體產生一系列的反應進而能夠通過吞噬作用消滅抗原。人體的整個免疫系統(tǒng)是由抗體和淋巴細胞構成的,其中淋巴細胞則由T細胞和B細胞構成。T細胞分為兩種,分別是TH和TS細胞,這兩種細胞相當于免疫系統(tǒng)中的正反饋環(huán)節(jié)和負反饋環(huán)節(jié)。當抗原入侵人體時,人體細胞得到消息并將消息傳遞給TH和TS細胞。如果抗原較多,免疫系統(tǒng)內TH數量會比TS多,此時B細胞較多。反之,抗原較少,則TS會抑制TH數量,導致TS數量較多,此時B細胞較少。免疫系統(tǒng)會根據B細胞數量產生抗體。
上述免疫規(guī)則用數學表達式如下所示: 設第i時刻的人體內抗原數量為φ(i),則TH在i時刻的數量為:
TH(i)=k1φ(i)
(3)
式中,k1為參數,表示正反饋因子。
TS細胞在i時刻的數量為:
TS(i)=k2f[S(i),△S(i)]φ(i)
(4)
式中k2為負反饋因子,主要起到抑制的作用。S(i)為當前i時刻B細胞數量;△S(i)為細胞B在i時刻和i-1時刻的差值。f為模型函數,取值范圍[0,1]。
細胞B的數量S(i)可以表示為:
S(i)=TH(i)-TS(i)=k1φ(i)-k2f[S(i),△S(i)]φ(i)=k1{1-η[f(S(i),△S(i))]}φ(i) (5)
式中η=k2/k1,表示整個系統(tǒng)的穩(wěn)定性效果。
2.2 算法控制器架構
本試驗使用的模糊免疫PID算法的基礎是PID控制,并且結合免疫算法和模糊推理算法。算法結構如圖5所示。

圖5 模糊免疫PID控制器原理圖Fig.5 Schematic diagram of fuzzy immune PID
免疫算法部分的比例參數設為kp1,根據式(5)可得:
kp1=k1{1-η[f(u(i),△u(i))]}
(6)
根據圖5所示算法結構可得免疫算法部分的輸出量為:
u(k)=kp1e(k)
(7)
如圖5所示,將免疫算法和PID算法以及模糊算法相結合可得:
(8)
式中的函數f(·)需要通過模糊算法逼近來實現。根據人體免疫系統(tǒng)原理“當細胞B接收的刺激越大,其抑制能力就相對減弱”,采用模糊算法構造模糊算法規(guī)則,其中控制輸入量設置為u,輸入量的變化量用△u,函數輸入量用f(u,△u)表示,P表示正,N為負,Z表示零。模糊規(guī)則如下:
(1)如果u是P,同時△u為P,則f(u,△u)為負值;
(2)如果u為P,但△u為N,則f(u,△u)為Z;
(3)如果u為N,同時△u為N,則f(u,△u)為Z;
(4)如果u為N,且△u為N,則f(u,△u)為P;
3 控制效果仿真測試
本試驗通過使用Matlab/Simulink軟件驗證基于模糊免疫PID算法的pH值調節(jié)算法。根據酸堿值中和模型,通過輸入開環(huán)階躍信號得到模型的傳遞函數為:
(9)
仿真測試分別進行了階躍響應信號輸入驗證和干擾信號輸入驗證。
3.1 階躍信號輸入驗證
首先使用一階保持器對模型進行離散化。仿真的采樣時間設置為2 s,pH值調節(jié)目標值分別設置為6.5和5.5。初始狀態(tài)時的pH值設置為8.4。每次仿真分別采用PID算法和模糊免疫PID算法進行pH值調節(jié),然后將仿真數據做對比,仿真結果如圖6所示。通過對比發(fā)現采用PID算法導致超調量遠大于模糊免疫PID算法,且模糊免疫PID算法密切跟隨目標值。

圖6 階躍信號仿真測試結果Fig.6 Test results of the step signal
3.2 抗干擾仿真測試
首先設置為階躍輸入信號仿真,且將pH值調節(jié)的目標值設置為7,在此基礎上分別對系統(tǒng)輸出口加入確定性干擾信號以及隨機信號以此測試算法的魯棒性。從數據對比可以看出模糊免疫PID算法抗干擾性能優(yōu)于PID(圖7)。
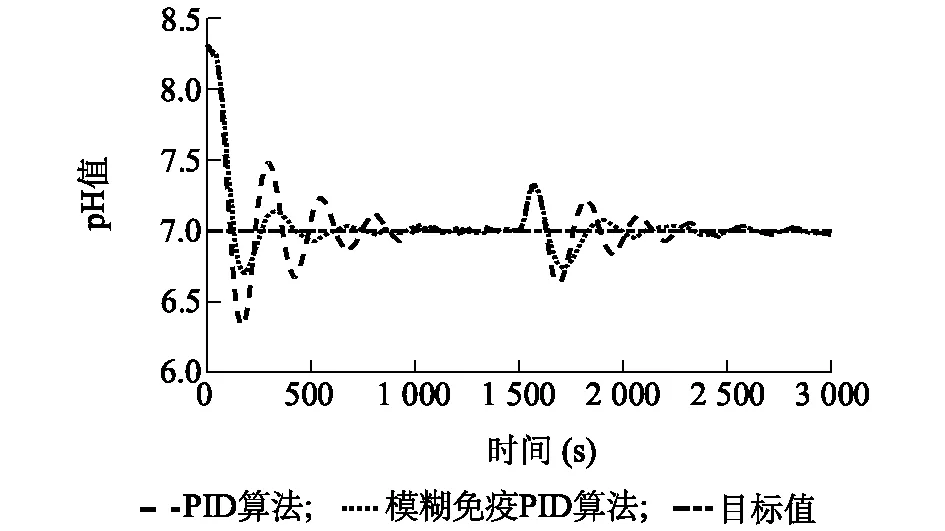
圖7 抗干擾仿真測試結果Fig.7 Test results of the anti-interference ability
4 肥液pH值調節(jié)試驗結果
pH值調節(jié)試驗平臺如圖8所示。儲水罐中為灌溉存水,通過測試確定pH值為7.9。在酸液罐中存放酸液物料稀鹽酸,濃度大概為0.2 mol/L。調節(jié)裝置中的補水設備負責保持混合罐中的液位保持恒定。肥液pH值調節(jié)系統(tǒng)輸出肥液流量為12 m3/h,酸液通道上的文丘里標準流量為115 L/h。控制酸液的電磁閥延遲時間為110 ms。pH傳感器測量精度為0.005。系統(tǒng)所用流量計為TI公司的EM4000型,輸出信號為標準的 4~20 mA,該流量計主要是為了測量系統(tǒng)的瞬時流量。管道上的電磁閥為了控制田間施肥管路。

圖中標號1表示蓄水罐設備;標號2為酸液存儲罐;標號3為儲水罐;標號4為控制器;標號5為精準施肥管道;標號6為流量傳感器;標號7為分水設備。圖8 肥液pH值調節(jié)平臺Fig.8 Physical map of pH regulation control system
4.1 不同目標值調試結果
pH值調節(jié)試驗進行兩組不同目標值試驗,目標值分別設置為6.0和5.5,試驗數據如圖9和圖10所示,通過對比發(fā)現PID算法調節(jié)時pH值波動較大,模糊免疫PID算法調節(jié)時pH值波動較小。PID算法調節(jié)時超調量遠大于模糊免疫PID算法。

圖9 目標值為6的調試結果Fig.9 Debugging results for target value 6

圖10 目標值為5.5的數據曲線Fig.10 Debugging results for target value 5.5
4.2 不同流量下的調試結果
酸液分別設置為4 m3/h和7 m3/h下進行PID算法和模糊免疫PID算法調試結果比較。試驗結果(圖11、圖12、表1、表2)顯示模糊免疫PID算法在最大誤差方面、平均絕對誤差方面以及均方根誤差方面均優(yōu)于PID算法。誤差率減小了60.00%~69.77%,平均絕對誤差減小了83.33%~87.50%,均方根減小了83.33%~88.89%。表明模糊免疫PID算法可以滿足pH值調節(jié)精度要求,且抗干擾能力較強。

圖11 酸液流量為4 m3/h時的調試結果Fig.11 Debugging results for flow rate 4 m3/h

圖12 酸液流量為7 m3/h時的調試結果Fig.12 Debugging results for flow rate 7 m3/h
表1酸液流量為4m3/h時不同控制算法調節(jié)pH值的誤差
Table1Erroranalysisofdebuggingresultsforflowrate4m3/h

控制算法最大誤差平均絕對誤差均方根誤差PID算法0.400.060.06模糊免疫PID算法0.160.010.01
表2酸液流量為7m3/h時不同控制算法調節(jié)pH值的誤差
Table2Erroranalysisofdebuggingresultsforflowrate7m3/h

控制算法最大誤差平均絕對誤差均方根誤差PID算法0.430.080.09模糊免疫PID算法0.130.010.01
5 結 論
針對精準農業(yè)生產中營養(yǎng)液需要調節(jié)pH值,pH值調節(jié)具有非線性、滯后性的特征,本試驗首先針對pH值調節(jié)過程建立了動態(tài)數學模型,以該模型為基礎設計了模糊免疫PID控制器。分別通過Matlab軟件仿真和使用肥液pH值調節(jié)平臺進行試驗,驗證了本試驗所提出的模糊免疫PID算法和傳統(tǒng)的PID算法的性能,試驗結果表明本試驗提出的模糊免疫PID算法在超調量、平方根誤差等方面均優(yōu)于傳統(tǒng)的PID算法。
參考文獻:
[1] NIU Y , ZHANG K. Development of fertigation control system based on embedded platform and self-adaptive control strategy:2nd International Conference on Electrical, Computer Engineering and Electronics [C]. Istanbul:SRPioneers,2015:1594-1600.
[3] 董全成,馮顯英. 基于自適應模糊免疫PID的軋花自動控制系統(tǒng)[J].農業(yè)工程學報,2013,29(23):30-37.
[4] 景興紅,王澤芳,宋樂鵬.自適應PID與PI符合控制變量施肥系統(tǒng)研究[J].農機化研究,2015(10):29-33.
[5] 何青海,孫宜田,李青龍,等.基于模糊控制的水肥藥一體化系統(tǒng)研究[J].農機化研究,2015(8):203-207.
[6] 李加念,洪添勝,馮瑞玨,等.基于模糊控制的肥液自動混合裝置設計與實驗[J].農業(yè)工程學報,2013,29(16):22-30.
[7] 魏正英,葛令行,趙萬華,等.灌溉施肥自動控制系統(tǒng)的研究與開發(fā)[J].西安交通大學學報,2008,42(3):247-349.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19