潮流分析和鳥群優化在風水協同運行中的應用
2018-05-07 09:24:37王璽楊秀媛范新橋祁鯤
發電技術 2018年2期
王璽,楊秀媛,范新橋,祁鯤
(北京信息科技大學,北京市 海淀區 100192)
0 引言
我國風電發展迅速,對于風電的有效利用卻非常低,出現嚴重的棄風現象,因此針對目前保守的風電使用,需研究出對應的調度策略,提高風電的利用率。綜合分析水電的特性,通過水電出力去平抑風電出力,是未來風電利用非常可行的方案[1]。風水協同發電是提高風電利用率,降低棄風現象的可行方案。通過風電水電協同運行,水電出力能夠平抑風電出力的波動性,形成較穩定的總出力,使風力發電可以按計劃調度。
目前風水協同運行相關的控制算法研究有導前微分控制算法、果蠅優化算法、遺傳算法等[2-16];本文提出將鳥群算法應用在風水協同控制中,該方法在求非凸、不可微算式時更加準確、迅速。
風水協同運行大多研究都是基于大電網同一母線的風電場與水電廠,雖從理論仿真分析上能夠看到明顯的控制效果,產生較為理想的協同出力計劃,但現實情況是每個發電站都有自己的一些利益考慮以及安全運行約束,單一母線和理想條件下的風水協同控制對電網風水協同運行調度可參考價值較低[17-19]。本文將風電場、水電廠的一些約束條件加入到協同控制流程中,使初始條件在滿足這些特殊要求以及電網絡約束條件的基礎上再去尋優,研究出較小范圍的協同出力效果。
1 風水協同運行約束條件
風電水電協同運行系統,主要根據風電的風速預測、水電的水量約束、系統的有功無功平衡約束等來確定未來24 h風電出力、水電出力以及系統總出力情況[20-23],使得風水協同運行調度方案可以被電網認可,電網根據這些出力情況,具體安排各個發電機組的出力計劃。
1.1 目標函數
風水協同運行目標是最小化調度成本,定義風電發電成本、水電發電成本、平滑功率輸出懲罰和棄風懲罰為多目標函數組成。保持平滑功率輸出懲罰或者棄風懲罰不變,研究其中一個對風水協同運行的影響。函數表達式為

式中:Ff為風力發電成本函數;Fs為水力發電成本函數;Fph為平滑輸出懲罰函數;Fqf為棄風懲罰函數。
設定平滑輸出懲罰 Fph為系統輸出功率的方差,在恒電價下,函數表達式為

式中:Mph為功率波動懲罰系數;ptP為風水協同系統平均輸出功率;t代表時間段;Pf為風電功率;Ps為水電功率。
設定棄風懲罰為Fqf,表達式為

式中:Mqf為棄風懲罰系數;jα為第j組風電機組的棄風比例。
1.2 系統安全運行約束條件
1)水電機組出力約束。
水電機組的出力約束表達式為

2)水電廠發電允許利用水量約束。
水電廠發電允許利用水量約束表達式為

式中:Qmin,i為第i組水電機組的最小用水量;Qmax,i為第i組水電機組的最大用水量。
3)水電機組約束。
水電機組約束表達式:
4)風電場的出力約束。
風電場的出力約束表達式為

式中:Pfmax為風電場最大出力;為該風電場的裝機容量大小。
根據國標GB/T 19963—2011《風電場接入電力系統技術規定》,裝機容量大于150 MW的風電場,在10 min內有功功率變化不能超過50 MW,因此系統最大波動限值表達式為

根據系統功率平衡,風電場功率、水電廠功率與計劃功率PL之間存在平衡關系:

5)網絡約束。
風電場與水電廠協同運行,通常不在同一條母線,系統經過潮流計算后,有可能會出現潮流越限,所以需要考慮網絡安全約束。線路傳輸功率約束為

式中:Pab,t為 t時間段內 ab支路的傳輸功率;Pba,max為支路ab正向最大傳輸功率;Pab,max為支路ab反向最大傳輸功率。
對于線路有功支路潮流,忽略并聯線路影響,表達式為

式中:Pab為支路有功功率;U為節點電壓;Gab為支路電導;Bab為支路電納。
2 鳥群優化算法
鳥群優化算法(bird swarm optimization algorithm,BSA)是從鳥群覓食、警覺以及遷徙等行為中抽象出來的一種全局尋優的優化算法。BSA具有收斂速度快、種群多樣性、避免陷入局部最優等特性,目前在微電網多目標運行優化研究、交通信號燈控制研究方面有應用[24-28]。鳥群算法的原理是初始化算法初始參數,在滿足各個約束條件的情況下,產生種群,種群中的個體代表一種調節方案,計算各個目標的適應度值,從中取非劣解,然后隨機選取非劣解中的個體作為全局最優解[27]。鳥群行為抽象成數學模型步驟如下:
1)種群中個體可以自由選擇覓食或者保持警覺。從0到1隨機取一個數值,設定固定區別值,當隨機數大于設定值則鳥為覓食狀態,當隨機數小于設定值時鳥為保持警覺狀態。鳥群算法流程如圖1所示。圖中,初始化種群與參數,每個個體代表一套調度方案或一組水輪機控制參數。初步計算出個體適應度值,即調度方案的總費用,篩選非劣解,并從中選取全局最優解,以鳥群的自然行為對應的更新策略對種群進行更新,計算新的適應度值,更新歷史最優解,將舊非劣解與新非劣解合并,去除重復個體,再繼續下一輪迭代,直到終止條件觸發,輸出最終非劣解,從中隨機選取個體作為最優調度方案。
2)鳥覓食。個體標記自己所經過的最佳覓食位置,并實時將位置信息分享到種群,標記種群最好覓食位置。

鳥經過的最好位置;Zn是鳥群整體最好位置;A為正常數,是鳥群認知系數,B為社會進化系數,rand(0,1)為0~1的隨機數。
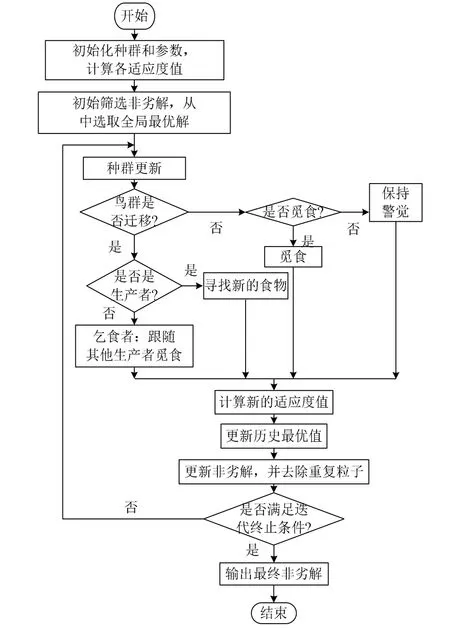
圖1 鳥群算法流程圖Fig. 1 The flowchart of the bird swarm algorithm
3)保持警覺。個體向種群中心靠攏,個體間有競爭性,食物儲備多的個體靠近種群中心概率更大。
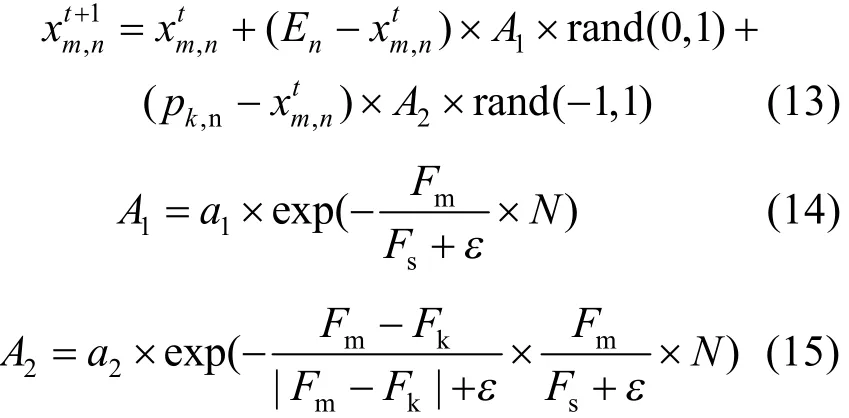
式中:En是種群平均適應度值;N是鳥群規模;k為[1,N]之間的隨機整數;a1、a2為[0,2]之間常數;Fm是第m個個體適應度值;Fs是種群適應度值總和;ε是計算機中最小常數,用來避免零分割。
4)群體周期性飛到其他空間。為了種群更好生存,個體會分享尋找的食物信息,根據食物儲備量劃分個體身份,食物數量最多的是食物生產者,食物數量最少的是乞食者,其余個體隨機劃分這兩個身份。當群體空間位置發生變化,個體的身份重新分配。

式中:randn(0,1)為產生一個服從期望值是0,標準差是1的高斯分布的隨機數;k屬于[1,N],且k不等于m;Pfl是乞食者跟同生產者找到食物的概率,且Pfl屬于[0,1]。
5)食物生產者努力搜尋食物,乞食者隨機跟一個食物生產者尋找食物。
3 鳥群算法在風水協同控制中的應用
基于鳥群算法的風水協同控制系統框圖如圖2所示。
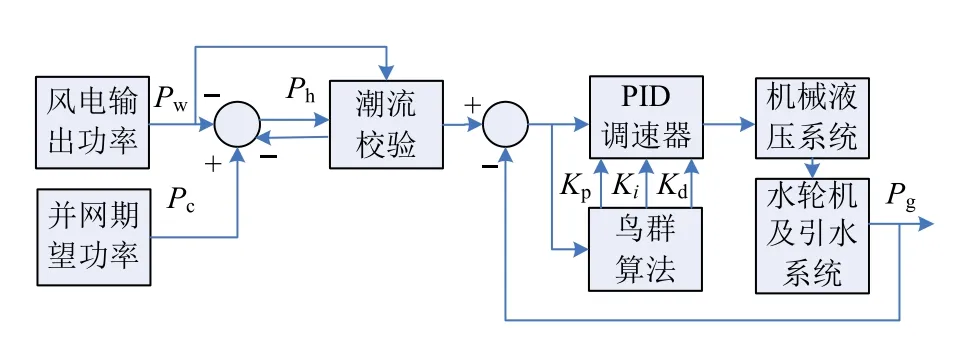
圖2 基于鳥群算法的風水協同運行框圖Fig. 2 Diagram of coordinated hydro and wind power generation based on bird swarm algorithm
圖 2中,并網期望功率 Pc與風電輸出功率Pw之差Ph,作為水輪機理想輸出功率,Ph同Pw進行系統網絡潮流計算校驗,系統越限,先逐步降低水電,再次進行潮流計算校驗,仍越限,降低風電,再進行潮流計算校驗;經過潮流校驗的水輪機理想輸出功率作為水輪機閉環控制的輸入信號,系統通過調節基于鳥群算法的調速器,控制導水葉開度來調節發電水流量,繼而控制水輪發電機組輸出功率跟蹤水輪機理想輸出功率,得到滿足電網絡安全約束的風電輸出功率與水電輸出功率,從而達到在電網絡安全約束條件下風水協同發電的目的。
4 仿真及分析
用Matlab搭建IEEE 30節點標準系統進行仿真分析,在第30節點增加一個風電機組節點31,如圖3所示。
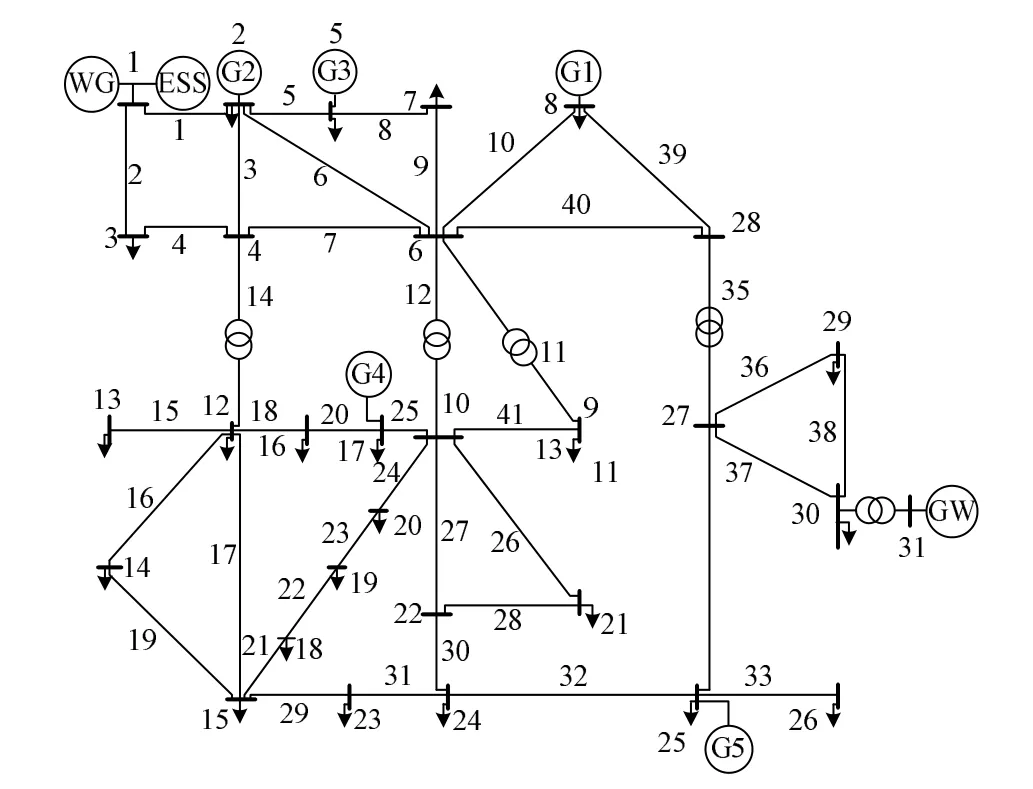
圖3 增加了風電場節點的IEEE 30電力系統Fig. 3 IEEE 30 bus power system with a wind power plant added
設定發電機各節點數據如表1所示,第2、5、8、17、25節點為水電廠節點,第31號風電場節點有功出力為25 MW。
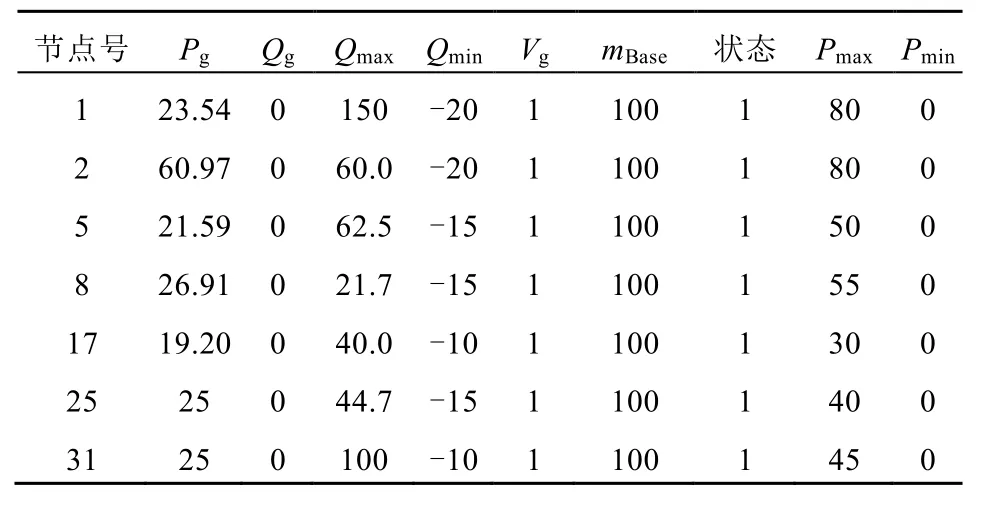
表1 發電機參數Tab. 1 Generator parameters
風電機組出力從0 MW變化到68 MW,潮流計算42條線路潮流變化曲線如圖4所示。不同線路潮流曲線用不同顏色標識,可以看出,當風電機組出力大小大于13 MW時,各個支路潮流逐步遞增,其中線路37在風電機組出力為15 MW之后,一直處于42條線路潮流最大值位置,所以最先可能發生線路潮流越限,在判斷是否滿足電網絡線路潮流約束時,可以參照線路 37的最大容量。假設由于線路熱穩定約束,線路電流不能超過0.6 pu,參看42條線路潮流變化曲線,線路37在電流為0.6 pu時風電機組出力為47.7 MW,為保持系統穩定運行,取機組最大出力的80%作為穩定出力點,即38.16 MW,超過該出力系統將失去穩定,需要限制風電場出力。
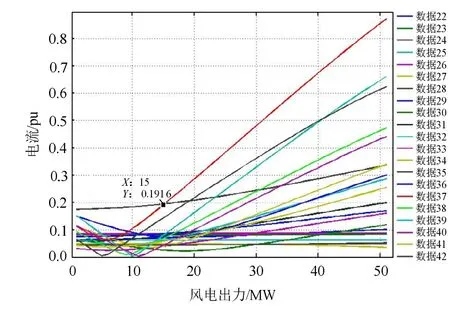
圖4 潮流計算42條線路潮流變化曲線Fig. 4 Power flow calculation 42 line trend curve
通過潮流計算篩選個體后,采用鳥群算法對系統進行控制仿真。棄風懲罰系數 Mqf=250元/MW,功率波動懲罰系數 Mph=1000(元/MW)。常規發電機參數和負荷預測數據參考文獻[29-32]。風電、水電、風水協同總輸出功率,在一天24 h的仿真曲線圖如圖5所示。
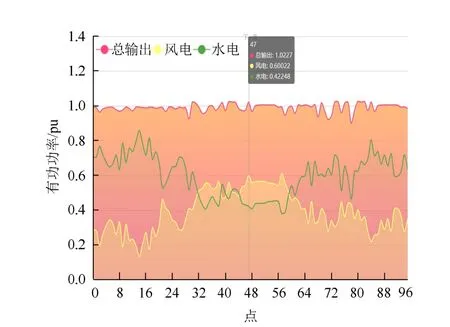
圖5 Mqf=250元/MW時風電、水電、風水協同總輸出功率Fig. 5 Wind power, hydropower, coordinated hydro and wind power generation total output power with Mqf=250 yuan/MW with Mqf=250 yuan/MW
風電水電協同輸出總功率基本穩定,可以看出水電機組出力很好的跟蹤了風電場輸出功率的波動。
設定棄風懲罰系數 Mqf=1000元/MW,功率波動懲罰系數 Mph=1000元/MW。風電、水電、風水協同總輸出功率,在一天24 h的仿真曲線圖如圖6所示。高棄風懲罰相對減少棄風的發生,能夠提升風電場整體經濟效益,缺點是系統協同總輸出功率波動性變大。
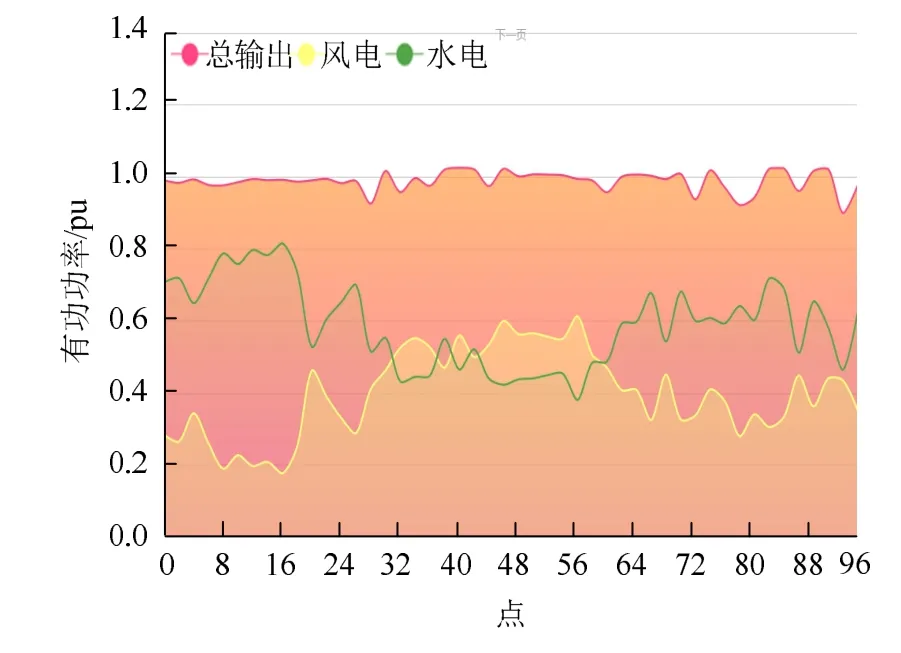
圖6 Mph=1000元/MW時風電、水電、風水協同總輸出功率Fig. 6 Wind power, hydropower, coordinated hydro and wind power generation total output power with Mph=1000 yuan/MW
5 結論
將鳥群算法應用到風水協同運行控制中,在滿足各個實際約束情況的基礎上,能夠實現應用水電出力填補風電出力變化來達到風水協同運行的目的。
在控制系統尋優前,先進行網絡安全約束潮流計算,可以保證系統安全穩定運行。
應用基于鳥群算法的風水協同發電優化調度程序,經過算例分析,在高功率波動懲罰或高棄風下,水電出力能夠較好地補充風電出力的波動。高功率波動懲罰下棄風較多,不利于資源利用;高棄風懲罰可以提高風能利用,減少棄風,提高風電場整體效益,但系統協同運行總出力的平穩性下降。
[1] Chen,Qiyu.Large-Scale Wind Generator Cascaded Tripping[C]//Proceedings of the 3 rd IEEE International Conference on Computer Science and Automation Engineering.Guangzhou:IEEE,2013.
[2] 王學成,楊雨.基于發電效益最大化的水光互補方案優化設計[J].發電與空調,2015,36(06):27-30,56.
[3] Chen Q Y,Littler T,Wang H.Tripping control for transient stability in coordinated hydro and wind generation[C]//Renewable Power Generation Conference.IET,2014:1-4.
[4] 范永威,施松陽.風-水電聯合系統功率優化輸出的研究[J].浙江電力,2007,26(6):1-4.
[5] Chen Q,Littler T,Wang H.Application of PMUs to coordinate hydroelectric and wind power plant operation[C]//International Conference on Sustainable Power Generation and Supply.IET,2013:1-6.
[6] 陳麒宇,張芳,章銳.風水協同運行控制信息的傳輸[J].發電技術,2018,39(1):53-57.
[7] Matevosyan J, S?der L. Short-term hydropower planning coordinated with wind power in areas with congestion problems[J].Wind Energy,2007,10(3):195-208.
[8] Chen Q Y,Littler T,Wang H.Tripping control for transient stability in coordinated hydro and wind generation[C]//Renewable Power Generation Conference.IET,2014:1-4.
[9] 李星,楊秀媛,王麗婕.棄風條件下考慮機群電價差異的風電場控制策略[J].發電技術,2018,39(1):43-46.
[10] Schlueter R A,Park G L,Reddoch T W,et al.A modified unit commitment and generation control for utilities with large wind generation penetrations[J].IEEE Transactions on Power Apparatus &Systems,1985,85(7):1630-1636.
[11] Matevosyan J,Soder L.Optimal Daily Planning for Hydro Power System Coordinated with Wind Power in Areas with Limited Export Capability[C]//International Conference on Probabilistic Methods Applied To Power Systems.IEEE,2007:1-8.
[12] 王開艷,羅先覺,吳玲,等.清潔能源優先的風-水-火電力系統聯合優化調度[J].中國電機工程學報,2013,33(13):27-35.
[13] 劉曉光,呂渤林.棄風條件下考慮機群電價差異的風電場控制策略[J].發電技術,2018.
[14] 李杏,孫春順,陳浩,等.基于隨機規劃的水風電聯合優化運行研究[J].電氣技術,2013(4):16.
[15] 楊秀媛,陳瑤,陳麒宇,等.導前微分控制在風電水電協同運行中的應用[J].中國電機工程學報,2015,35(18):4591-4597.
[16] 楊秀媛,陳麒宇,王蒙,等.考慮網絡約束的風電水電協同果蠅優化控制[J].中國電機工程學報,2017,37(18):5286-5293.
[17] 袁鐵江,晁勤,吐爾遜,等.大規模風電并網電力系統動態清潔經濟優化調度的建模[J].中國電機工程學報,2010,30(31):7-13.
[18] 陳道君,龔慶武,張茂林,等.考慮能源環境效益的含風電場多目標優化調度[J].中國電機工程學報,2011,31(13):10-17.
[19] 蘭維,張中泉,雷陽,等.風電機組出力性能分析方法研究[J].發電與空調,2017,38(3):26-29,46.
[20] 李杏,孫春順,陳浩,等.基于隨機規劃的水風電聯合優化運行研究[J].電氣技術,2013(4):016
[21] 王輝.在互補約束條件下的水電、火電、風電聯合調度研究[D].天津:河北工業大學,2012.
[22] 劉陽林,葉小廣,楊超,等.一種風力發電機組功率曲線的驗證方法[J].發電與空調,2017,38(1):59-62.
[23] 蘭維,張中泉,雷陽,等.風電機組出力性能分析方法研究[J].發電與空調,2017,38(3):26-29,46.[24] 陳麒宇,Littler,王海風,等.風電水電協同運行計劃的優化[J].中國電機工程學報,2014,34(34):6074-6082.
[25] 曾嶒,彭春華,王奎,等.基于鳥群算法的微電網多目標運行優化[J].電力系統保護與控制,2016,44(13):117-122.
[26] 崔東文,金波.鳥群算法-投影尋蹤回歸模型在多元變量年徑流預測中的應用[J].人民珠江,2016,37(11):26-30.
[27] 曹雪竹.基于鳥群算法的交通信號控制[D].北京:中國科學院大學,2014.
[28] 劉曉龍,寧芊,趙成萍,等.基于萊維飛行的鳥群優化算法[J].計算機測量與控制,2016,24(12):194-197.
[29] 曾嶒.微電網多目標優化調度模型及算法研究[D].南昌:華東交通大學,2016.
[30] 王伯林.水輪發電機組的模型參考自適應控制[J].自動化學報,1987,13(6):408-415.
[31] 王伯林.水輪發電機組轉速自適應控制[J].水力發電學報,1989(4):41-48.
[32] 劉保松,劉曉光.風電機組功率曲線的優化研究[J].發電與空調,2015,36(5):36-40.
