艙門展收機構運動與結構參數優化設計
2018-05-07 08:12:24田子陽高志慧王明
機械制造與自動化 2018年2期
田子陽,高志慧,王明
(北京航空航天大學 機械工程及自動化學院,北京 100191)
0 引言
隨著我國航天技術的不斷發展,各類航天器關鍵機構的研制成為目前各大科研機構的重要任務。艙門展收機構是航天器的重要組成部分,其性能的好壞將直接影響航天器能否順利完成在軌任務。目前對艙門展收機構的研究已較為成熟,如嵇景全等[1]對國內外多種艙門機構進行了原理特點等分析,歐陽平超[2]對載人航天器艙門機構的發展進行了較為詳盡的闡述。本文基于某艙門展收機構原理樣機,應用ADAMS軟件的參數優化功能,對該艙門展開機構進行參數優化設計,通過優化機構的各桿件結構、長度、位置等,在確保該機構轉動過程中具有良好的傳動特性的同時滿足展開位置、展開范圍、展開力矩等技術要求,從而實現該機構的最優化設計。
1 艙門展開機構方案要求
艙門展收機構原理樣機的結構示意圖如圖1所示,該艙門展收機構為一套主要由桿1、桿2、桿3、桿4以及鉸鏈
1、鉸鏈3、鉸鏈4、鉸鏈5、鉸鏈6、鉸鏈7等組成六連桿機構。鉸鏈4處連接驅動電機,鉸鏈1、鉸鏈3分別固連在艙門及艙體上。電機驅動六連桿機構,進而控制艙門的展開與閉合。
本文基于ADAMS軟件,對圖1(a)所示的艙門展收機構進行結構優化設計,具體優化要求如下:
1) 鉸鏈2位置固定;
2) 鉸鏈1位置可調,在當前位置在0~80mm的范圍內移動;
3) 鉸鏈3距離艙體側邊的安裝距離可調,以不干涉為準;
4) 鉸鏈4安裝位置可調,水平方向盡量靠向左側,以不超出框為準,豎直方向無限制;
5) 桿3形狀優化后,應盡量靠左,展開后,不能與艙體橫梁干涉;
6) 艙門展開最大展開角度為165°,展開達到最大角度165°時需要具有斷電保持能力;
7) 艙門重為70kg、固定式輻射器重為15kg、可展開輻射器重為15kg。
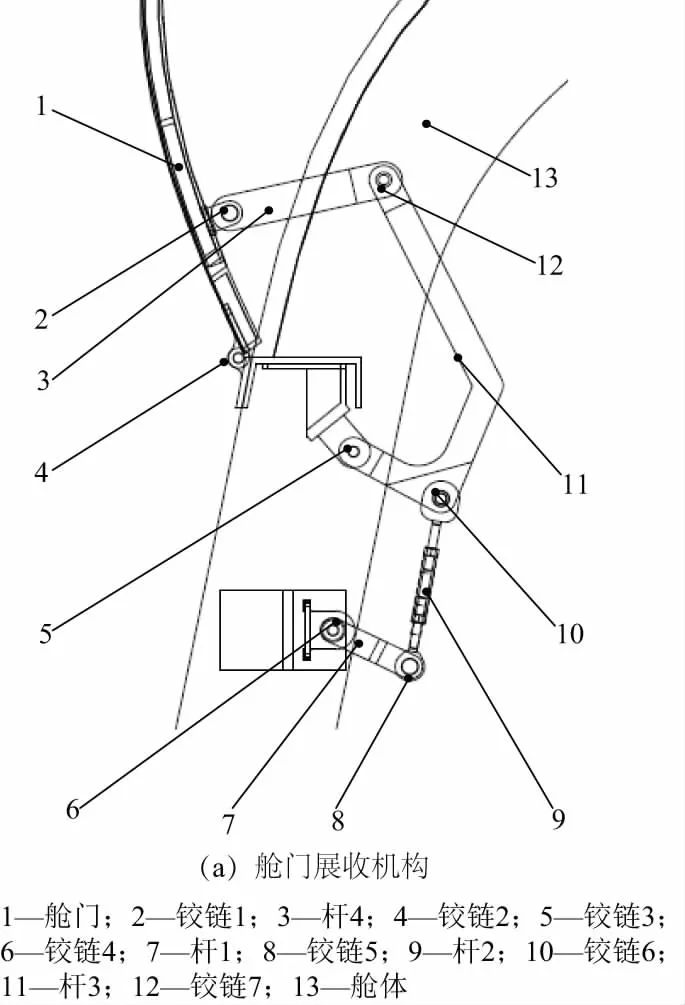
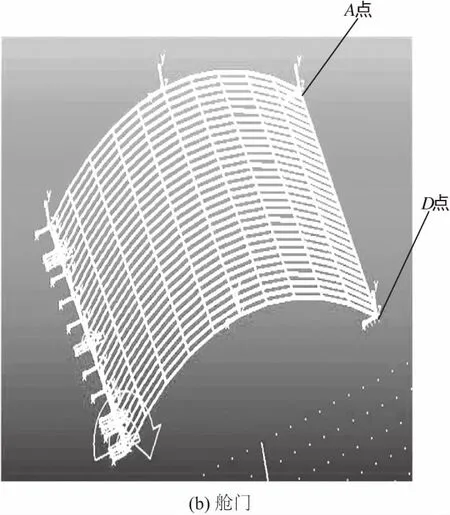
圖1 艙門展收機構及艙門示意圖
2 面向低沖擊的艙門展收運動優化設計
艙門系統由于自身剛度不足,在運動過程中容易受到因速度變化帶來的沖擊與振動的影響[3]。空間艙門橫向尺寸過大,通常將其視為柔性體。由于機構預設為單端施加轉矩,艙門由于剛度不足導致電機施力端與另一端運動形式不一致,艙門整體結構繞理論位置前后振動,在內部交變應力的影響下,艙門系統整體安全性與可靠性受到影響。
對簡化模型進行網格劃分,使之成為柔性體,并在連接處施加轉動約束與驅動約束,如圖1(b)所示。D點為艙門系統最靠近伺服驅動電機的艙門末端處,A點為艙門系統最遠離伺服驅動電機的艙門末端處。艙門系統的展開收攏精度由A點與D點體現,通過分析艙門系統極限位置A點與D點的艙門振動,可以得知艙門系統在特定運動規律下誤差與振動的最大值。
艙門在轉動過程中會產生振動,在不考慮啟動與停止的沖擊情況下,設定艙門展開角度為165°,展開時間60s,其經過勻速、勻加速、正弦加速度、余弦加速度4種艙門展開運動形式A點與D點的角度誤差分別如圖2所示,相應測定艙門在轉動過程中的最大振動滯后量如表1所示。
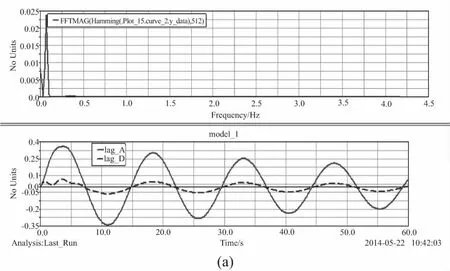
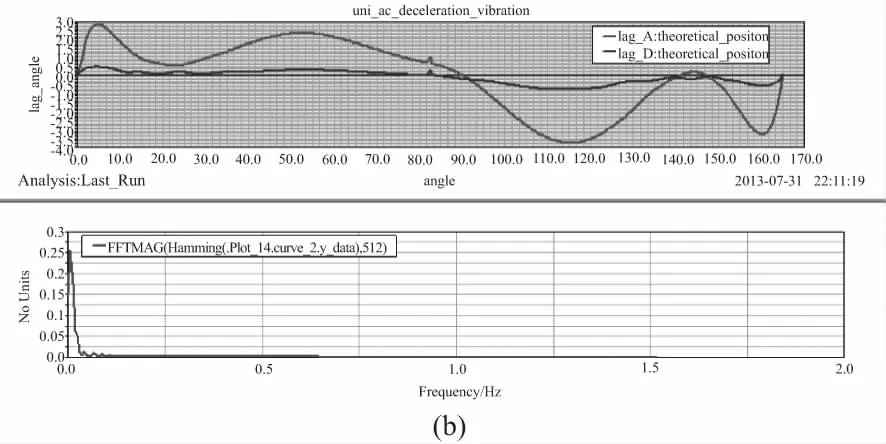
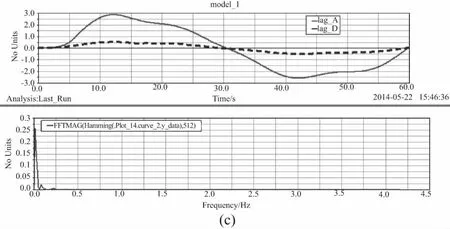
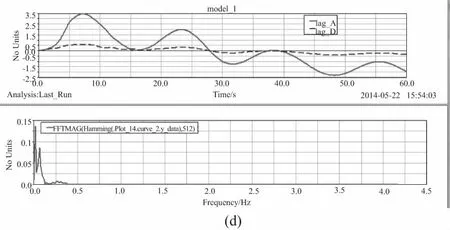
圖2 艙門運動振動曲線
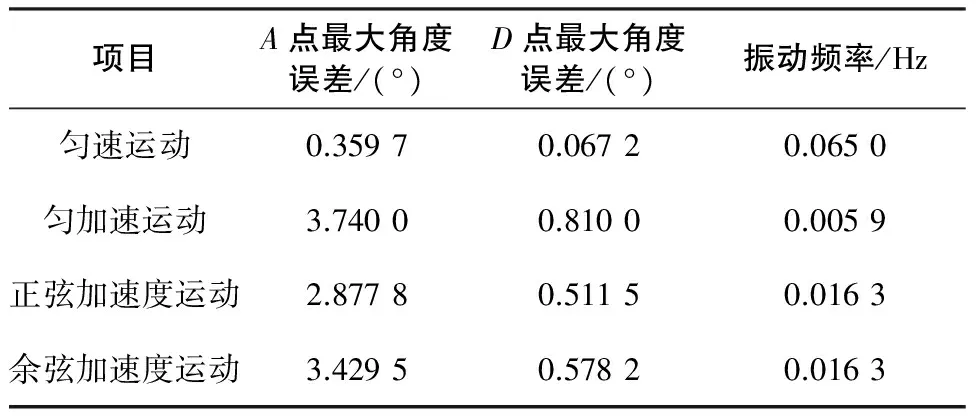
項目A點最大角度誤差/(°)D點最大角度誤差/(°)振動頻率/Hz勻速運動0.35970.06720.0650勻加速運動3.74000.81000.0059正弦加速度運動2.87780.51150.0163余弦加速度運動3.42950.57820.0163
由表1可知艙門在勻速運動過程中振動與角度誤差最小,因而艙門在轉動過程中應盡可能保證勻速轉動,同時為了減小啟動與停止時沖擊,采用混合運動規律,在艙門啟動與停止階段采用勻加減速運動,在中央平穩運動區域采用勻速運動。其角速度運動規律如下所示:
IF(time-10:-2.05d/10*time,-2.05d,IF(time-80:-2.05d,-2.05d,IF(time-90:-(2.05d-1.85d/10*(time-80)),-0.2d,0)))
(1)
艙門運行過程中,測量A點與D點的理論展開角度與實際展開角度差值即為振動曲線,艙門余弦加速度運動下的振動曲線與傅里葉變換如圖3所示。
艙門A點最大角度誤差為3.13°,艙門D點最大角度誤差為0.528 6°,頻率為0.065 1 Hz。
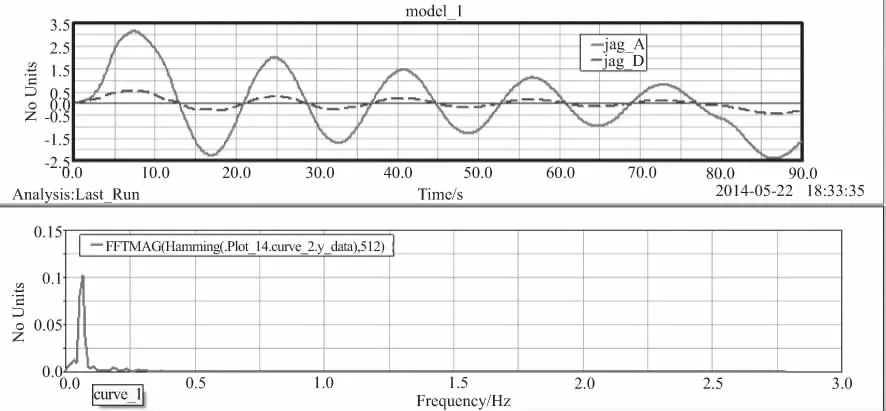
圖3 艙門混合運動振動曲線
3 基于ADAMS的參數優化設計
3.1 確定設計變量及參數化建模
本文采用ADAMS軟件對艙門展收機構進行優化,采用初始位置各連接點處的橫、縱坐標作為設計變量。艙門展收機構由六連桿機構構成,如圖4所示。
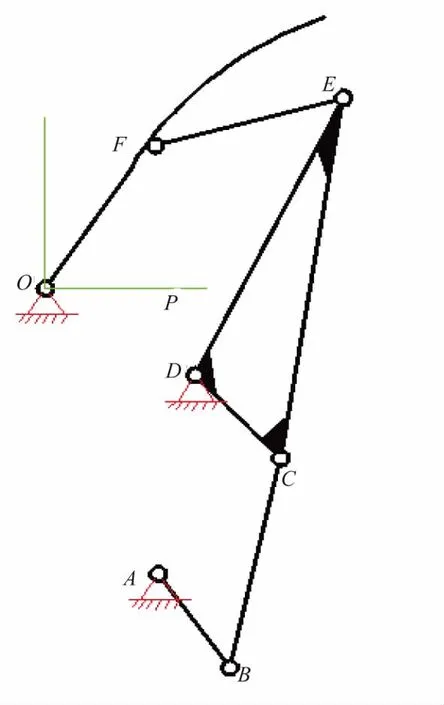
圖4 艙門展收機構模型
艙門上的O點固定,以O點作為原點建立坐標系,由于艙門外框與內部空間要求,對艙門各個固定鉸接點有著空間位置的要求,同時艙門系統在展開達到最大角度165°時需要具有斷電保持能力,即此時桿AB與桿BC需處于死點位置,因此將A、B、C、D、E、F這6個點作為設計變量,對其桿長及空間位置進行優化。
3.2 確定約束條件
由于艙門展收機構可分解為2個串聯在一起的四桿機構,因此為了保證機構在運動過程中具有較好的傳動性能,需要保證2個四桿機構的傳動角都處于較大值。因此對機構添加了2個傳動角的約束條件。
根據幾何關系有:
30°<∠BCD<140°
(2)
40°<∠OFE<140°
(3)
為了能讓四桿機構順利地通過死點位置,需要保證各桿滿足長度關系。曲柄搖桿機構ABCD的約束為:
AD+CD>AB+BC
(4)
BC+CD>AB+AD
(5)
雙搖桿機構DEFO的約束為:
DE>OD
(6)
DE+EF>OD+OF
(7)
3.3 擬定目標函數
根據艙門展收機構的優化設計要求,在∠ABC等于180°,即達到死點位置時,艙門OF展開了165°。因此,優化目標就是艙門展開的角度減去165°的絕對值最小。
目標函數定義為:
MIN |∠POF-ATAN(PFY/PFX)-165°|
(8)
3.4 優化仿真
本文采用OPTDES-SQP算法來進行優化。ADAMS軟件主流優化算法為OPTDES-GRG與OPTDES-SQP。其均為OPTDES中的二級程序算法。OPTDES-GRG為應用OPTDES的廣義遞減梯度算法,是求解一般非線性優化問題的最有效算法之一[4]。OPTDES-SQP是應用OPTDES的二次規劃算法,該算法通過變尺度法來近似構造Hessian矩陣,因此又被稱為約束變尺度法。
艙門基于ADAMS-View中的參數化模型,建立相應測量函數,實時監測優化過程中主要參數變化情況[5-6],目標函數的優化結果如圖5所示。
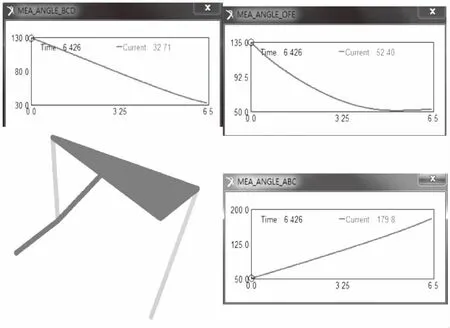
圖5 目標函數優化結果
從圖中可以看出,優化后目標函數的值達到較小的值0.096 73。說明在達到死點位置時,艙門從起始位置正好轉過了165°,滿足了優化的目標。傳動角的變化范圍分別是:32.71°~90°、45.074°~ 90°,均滿足了給定的約束條件。
艙門轉動過程中,展收機構傳動角∠BCD與∠OFE以及桿件AB與BC夾角如圖6所示,在艙門轉動過程中∠BCD由128.974 4°變動至32.760 8°,∠OFE由134.926°變動至51.196 3°,∠ABC由50.906 6°變動至179.9°,均滿足優化設計要求。

圖6 艙門系統傳動角與桿件夾角
優化設計前與優化設計后的設計變量對比如表3所示。
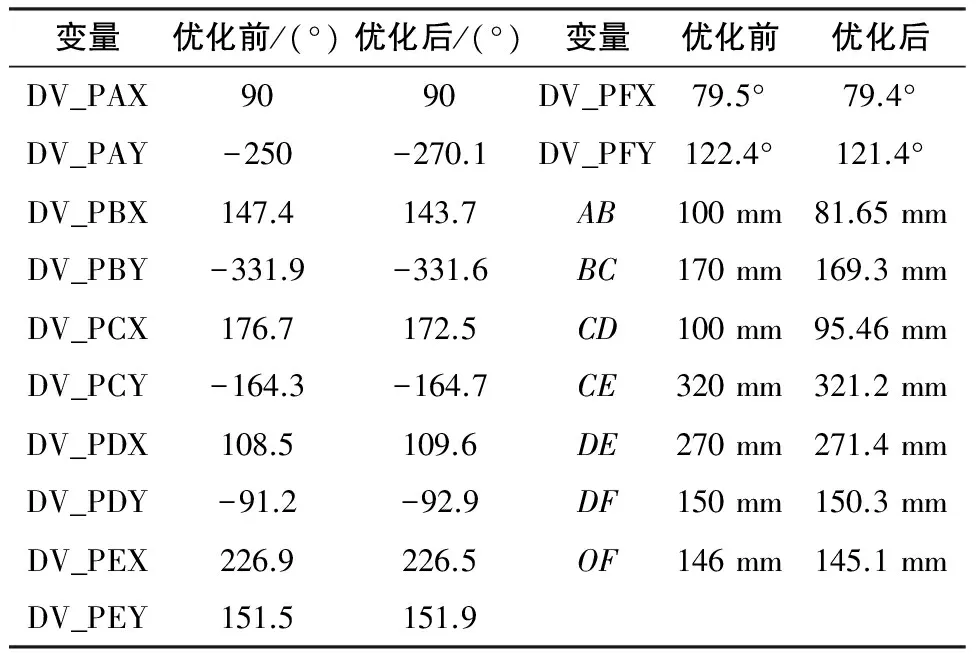
表3 優化結果
3.5 驅動力矩計算
由于在太空中艙門展收機構處于失重狀態,因此艙門電機需克服的阻力矩為艙門轉動慣量產生的阻力矩、關節折彎阻力矩、電纜阻力矩、艙門軸系阻力矩等。
為了方便對艙門轉動慣量的計算,本文將弧形的艙門近似為薄壁的質量均勻分布的平板,其對轉軸的轉動慣量可以通過式(9)計算。
(9)
利用薄壁細桿對端面轉軸的轉動慣量的計算公式為:
(10)
結合上述給定的要求,艙門對鉸鏈點O所在轉軸的轉動慣量為:
JZ=19.75kg·m2
(11)
艙門轉動慣量所產生的阻力矩通過式(12)得到。
M1=JZ?
(12)
把所有的阻力矩都加載在鉸鏈O上,在ADAMS中的表達式如下:
.cangti.gan_OF_MEA_1*19.75+3+7.5+5
(13)
在ADAMS中,讓驅動電機以1.928 °/s的角速度勻速旋轉,轉動60 s后艙門剛好轉動了165°。
通過ADAMS測量各桿件在整個展開過程中受力情況,確定受力最大的危險桿件,各桿件受力如圖7所示。在艙門展開過程中,桿件AB受力最小為204.830 1N,最大為378.458 9N;桿件BC受力最小為204.830 1N,最大為378.458 9N;桿件CDE受力最小為245.476 1N,最大為462.450 3N;桿件EF受力最小為72.881 1N,最大為104.118 3N。
從曲線可以得到電機的驅動轉矩最大值是32.336 5N·m,由于驅動力矩裕度≥2,所以電機的輸出轉矩應≥64.673N·m。

圖7 艙門桿件受力曲線
4 模型調整
根據ADAMS的優化結果,對原艙門展收機構進行重新建模,完成對艙門展收機構的優化設計。重建后的艙門展收機構具體結構如圖8所示,支座F安裝在艙門上隨著艙門展開運動,支座A安裝在艙門外框上與伺服電機相連接,支座D安裝在艙門橫梁上與CDE組件連接,限制連桿運動。電機組件將驅動力傳遞給AB組件,然后AB組件將力傳遞給BC組件,接著BC組件將力傳遞給CDE組件,CDE組件的特定形狀保證其在傳遞驅動力給EF組件的同時,不會與支撐橫梁發生干涉,進而由EF組件推動艙門向外翻轉展開。
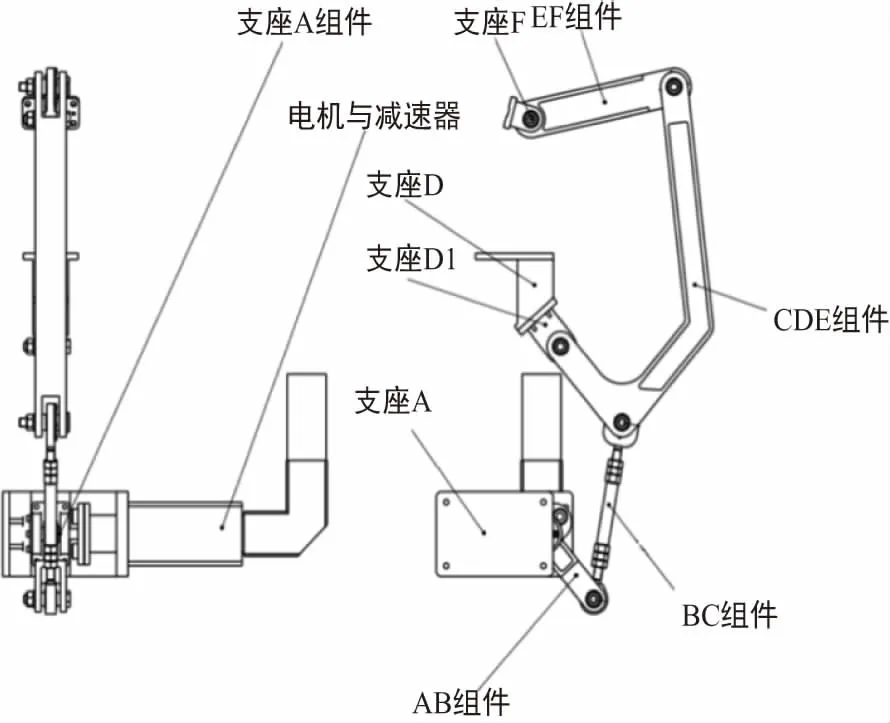
圖8 艙門展收機構
5 結語
本文利用ADAMS軟件分析確定了面向低沖擊的艙門展收運動形式,并對艙門展收機構進行了參數優化設計,在保證2個壓力角分別>30°和40°的前提下,當主動曲柄與連桿達到死點位置時,末端執行機構從初始位置剛好轉到165°。
通過優化實現了艙門展開165°時機構處于死點位置,達到斷電保持的要求,同時保證轉動過程中機構具有良好的傳動特性,滿足了優化設計的要求。
參考文獻:
[1] 嵇景全, 劉志全, 游巍. 載人航天器艙門機構原理與特點分析[J]. 載人航天,2003(3):34-39.
[2] 歐陽平超. 載人航天器艙門機構發展綜述[C]. 海拉爾:第二十五屆全國空間探測學術研討會摘要集,2012.
[3] 謝向榮, 俞翔, 朱石堅. 基于ADAMS的柔性基礎振動系統隔振性能分析[J]. 振動與沖擊, 2010,29(3):185-188.
[4] 高秀華, 王云超, 安二中,等. 基于ADAMS的裝載機工作裝置優化[J]. 計算機仿真,2007,24(1):217-221.
[5] 郭衛東. 虛擬樣機技術與ADAMS應用實例教程[M]. 北京: 北京航空航天大學出版社,2008.
[6] 趙武云. ADAMS基礎與應用實例教程[M]. 北京:清華大學出版社,2012.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
天天愛科學(2020年6期)2020-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
數學物理學報(2017年6期)2018-01-22 02:26:40
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16