動力刀架齒輪系傳動誤差分析
2018-05-07 08:12:23耿埡洲孫蓓蓓
機械制造與自動化 2018年2期
耿埡洲,孫蓓蓓
(東南大學 機械工程學院,江蘇 南京 211189)
0 引言
動力刀架是高檔數控機床的重要功能部件,其中齒輪傳動系統是控制動力刀具旋轉加工的核心傳動裝置,齒輪系的傳動誤差直接影響動力刀架的動力傳遞與分度定位,影響切削加工質量與傳動精度。同時,也是動力刀架振動與噪聲的重要激勵源之一[1-2]。
國內外學者對動力刀架齒輪系傳動誤差的研究很少,分析其傳動誤差時未能同時考慮齒輪制造、安裝誤差和受載輪齒的彈性變形等因素的影響。對于齒輪傳動誤差,Velex和Kahraman[3-4]研究了輪齒修形、安裝誤差、齒廓誤差等對傳動誤差的影響,分析了輪齒載荷與傳動誤差之間關系。A.Andersson[5]等通過數值仿真分析了不同轉速下由輪齒動載荷引起的動態傳動誤差和接觸壓力變化。Zdenek[6]等從多體動力學的角度對齒輪傳動誤差進行了預測。唐進元[7]根據傳動誤差定義,構建了齒輪副傳動誤差的概念模型和力學模型,并推導了傳動誤差的計算公式。張靖[8]等建立了多平行軸齒輪系統多自由度集中參數模型,通過仿真獲得齒輪副嚙合的動態傳動誤差。李忠[9]等根據齒輪的公差等級,應用概率法對火炮方向機齒輪靜傳遞誤差進行了計算,并用有限元法分析了動態傳動誤差。
上述研究大多分析了傳動誤差的影響因素及其關系,通過仿真與實驗技術預測傳動誤差,僅表現為輪齒某點動態傳動誤差的時序變化,常用拉格朗日接觸算法求解齒面接觸問題,占用大量計算資源。對于動力刀架齒輪系的傳動誤差研究,本文綜合考慮齒輪制造與安裝過程中齒輪各項誤差的隨機性,應用Monte-Carlo模擬試驗法,計算了輪齒嚙合綜合誤差;根據嚙合剛度理論,提出了一種解析法與虛擬仿真技術相結合的方法,求解齒輪因受載變形產生的傳動誤差;采用基于罰函數的齒面摩擦非線性接觸的建模方法,在保證計算結果正確的前提下,有效地節省了計算資源。
1 動力刀架齒輪系傳動誤差
1.1 傳動誤差產生機理與影響因素
傳動誤差定義為主動輪單向回轉時,從動輪實際位置與理想位置的差距,理想位置是指主從動輪均為理想漸開線齒形,無彈性變形時從動輪所處位置。
由于齒輪制造誤差、裝配誤差及受載變形等因素的影響,傳動誤差不可避免。齒輪制造時的幾何偏心、齒形誤差和齒厚偏差等誤差,表現為齒輪傳動平面內的轉角誤差和軸向平面內的齒向線誤差,通常可用一齒內的轉角誤差和一周內的轉角誤差綜合表示。裝配誤差是由齒輪實際回轉中心相對理論回轉中心的偏離引起,主要包括齒輪與軸的間隙、軸承與軸的徑向間隙及中心距偏差。齒輪制造誤差和安裝誤差引起的誤差稱為輪齒嚙合綜合誤差。在齒輪嚙合過程中,隨著傳動齒輪和傳動軸受負載轉矩的增大,傳動軸和齒輪產生扭轉變形和彎曲變形,使齒輪轉動角產生滯后,也會引起傳動誤差,主要包括輪齒變形、輪體變形、傳動軸變形及軸承變形等。
傳動誤差運動學模型如圖1所示,主從動輪的基圓半徑分別為rp和rg,嚙合起止始點分別為S、E點,理想的漸開線齒輪在節點C處嚙合。齒輪嚙合綜合誤差和輪齒受載變形,使齒輪嚙合齒廓偏離理論的理想嚙合位置,破壞了漸開線齒輪的正確嚙合方式,實際的嚙合起始點為S′點,在嚙合線上偏移了一段距離SS′,這種偏移使齒輪瞬時傳動比發生變化,從而產生傳動誤差。齒輪嚙合過程中的位移型激勵,造成輪齒之間碰撞和沖擊,引起齒輪傳動的振動,這就是齒輪嚙合的誤差激勵機理。
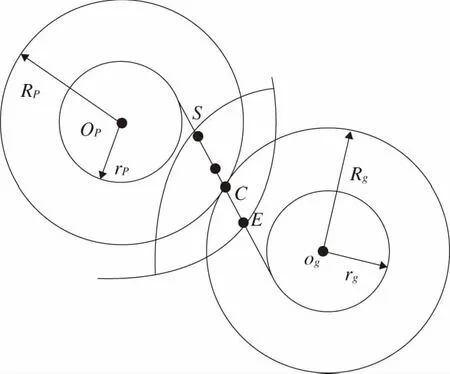
圖1 傳動誤差運動學模型
此外,齒輪傳動過程中齒面摩擦激勵造成齒面磨損、發熱、能量損耗,影響齒輪沿垂直嚙合線方向的平移振動并制約齒輪扭轉振動,也是影響傳動誤差的重要因素。在齒面存在輕微損傷或齒面潤滑不良的情況下,齒面摩擦力甚至將成為主要的振動源。
1.2 傳動誤差計算模型
傳動誤差通常作為一角值出現,在設計和分析中,考慮到部件的誤差來源時使用線值更方便,用齒輪嚙合作用線方向的位移來計算和分析傳動誤差[10],符號TE。輪齒在接觸點沿作用力方向的彈性變形包括輪轂扭轉、輪齒彎曲變形和齒面接觸變形。對于單級齒輪副,若主動輪Δt時間內轉過角θp,在嚙合線上的位移為rpθp,則從動輪在嚙合線上的位移是:
rgθg=rpθp-DBp-DHp+Ep+Eg-DBg-DHg
(1)
式中,θp、θg為主、從動輪扭轉角位移;rp、rg為主、從動輪基圓半徑;DBp、DBg分別表示兩輪齒彎曲變形量;DHp、DHg分別表示兩輪齒的接觸變形量;Ep、Eg分別表示兩齒輪的嚙合誤差(含制造和安裝誤差),負偏差取負值,正偏差取正值。
因此,齒輪傳動誤差表示為:
TE=rpθp-rgθg
(2)
令δ=DBp+DHp+DBg+DHg,表示齒輪沿嚙合線的受載變形量,令E=Ep+Eg,表示輪齒的嚙合綜合誤差,則:
TE=E-δ
(3)
1.3 齒輪各項誤差計算
1) 齒輪制造誤差

(4)
式中:θ為齒輪相位角;z為齒數。
2) 齒輪裝配誤差
齒輪的裝配誤差E″主要由齒輪孔與軸之間的間隙e1、齒輪安裝處軸頸跳動公差e2、軸承的徑向跳動e3組成,計算公式為:
(5)
式中:θi為間隙相位角,均服從0,2π間的均勻分布。
因此,由齒輪制造誤差和裝配誤差引起的輪齒嚙合綜合誤差Ei表示為:
(6)
3) 輪齒變形誤差
動力刀架齒輪系傳動軸和軸承剛度遠大于輪齒剛度,因此齒輪的扭轉變形主要表現為輪轂扭轉、輪齒彎曲變形和齒面接觸變形。為便于分析輪齒扭轉變形產生的傳動誤差,將變形量用在分度圓上的扭轉變形角來描述。根據扭轉嚙合剛度理論[11],定義扭轉剛度ke為齒輪受載轉矩和輪體受載扭轉角的比值。考慮到齒輪從單齒過渡到雙齒時,齒輪的變形會逐漸變小,引入齒輪重合度系數εα,則齒輪的扭轉變形角位移δ為:
(7)
式中:Δyi為分度圓處扭轉變形量;ke為扭轉嚙合剛度。
1.4 多級齒輪傳動誤差的計算
1) 單個齒輪
齒輪Zi的傳動誤差為Δi,則傳動誤差角度值為:
(8)
式中:di為齒輪Zi的分度圓直徑。
2) 單級齒輪副
一對齒輪副的誤差由主動輪Zi和從動輪Zj的傳動誤差合成。以齒輪Zj為讀數,則一對嚙合齒輪副的單向傳動誤差φi為:
(9)
式中:Δi為齒輪Zi的傳動誤差;Δj為齒輪Zj的傳動誤差;dj為齒輪Zj的分度圓直徑。
3) 多級齒輪傳動系統
對于一個n級傳動的齒輪系統,將各級齒輪副的傳動誤差,通過傳動比等效轉化到輸出齒輪上。以最后一個齒輪為讀數,齒輪系統傳動誤差角度值φn′為:
(10)
式中:ik為第K對齒輪副傳動比,即ik=dk+1/dk。
1.5 動力刀架齒輪傳動系統
本文研究的動力刀架為一種新型全功能動力刀架,中心高為100mm。根據設計要求,刀具最高轉速為4 000r/min,分度精度±4″,重復定位精度±1.6″。動力刀架結構如圖2所示,刀架自帶伺服電機,從系統接入信號即可運行,不需由機床的伺服系統分配動力。該齒輪系屬于高速輕載系統,采用三級齒輪傳動,如圖3所示。動力刀具的驅動系統由獨立電機驅動,動力刀具經過電機齒輪,小過渡齒輪、大過渡齒輪、驅動齒輪,在離合器作用下,刀座與驅動齒輪內孔的一字槽相結合,刀具旋轉加工零件。
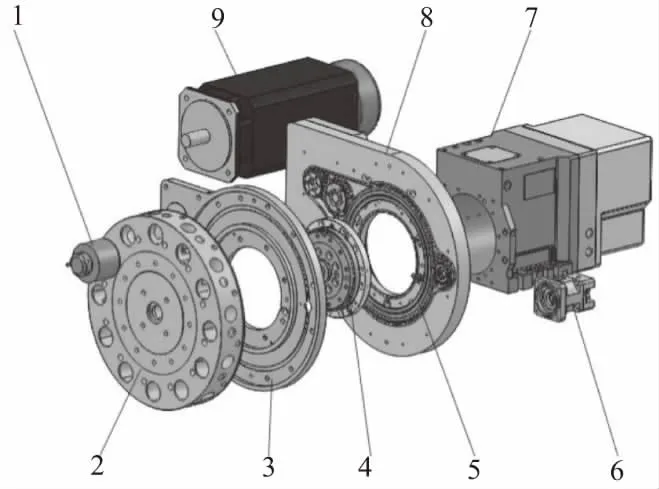
1—刀座;2—VDI刀盤;3—傳動箱蓋板;4—端齒盤; 5—齒輪傳動系統;6—離合器;7—箱體;8—傳動箱底板;9—動力電機圖2 動力刀架主要結構爆炸圖
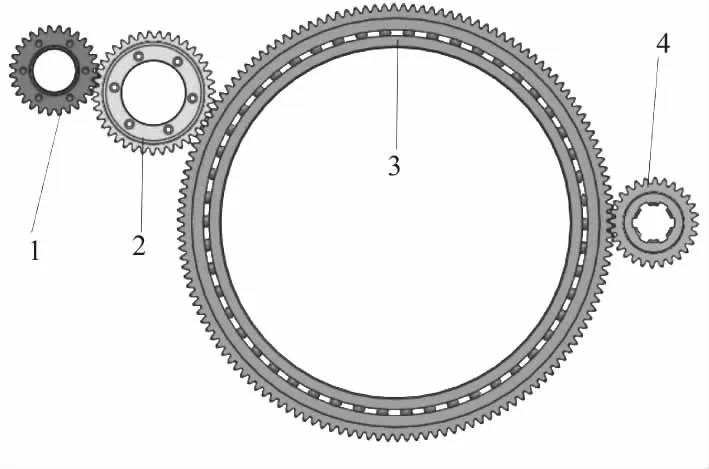
1—電機齒輪;2—小過渡齒輪;3—大過渡齒輪;4—驅動齒輪圖3 動力刀架齒輪系結構圖
該多級平行軸齒輪傳動裝置結構扁平、緊湊,傳動比準確、功率恒定。其中小過渡齒輪和大過渡齒輪為惰齒輪,其材料性能與加工精度具有較高要求,保持了精確的運動配合與動力傳遞,具有其他傳動裝置不可替代的優勢。研究其傳動誤差對分析動力刀架齒輪系的傳動特性,提高傳動精度,保證加工質量具有重要的意義。
2 輪齒嚙合誤差的Monte-Carlo模擬
本節采用Monte-Carlo模擬試驗法,從齒輪制造與安裝產生的各項誤差分析,按齒輪傳動系統各項誤差的概率分布函數,對齒輪系統的傳動誤差進行了統計模擬,在一定置信度下,確定齒輪傳動誤差的大小,為齒輪系統傳動精度的分析與設計提供一定的理論與方法。
結合概率統計法計算傳動誤差,首先作如下假設:
1) 齒輪各項誤差都是連續型隨機變量。
2) 各項誤差的分布都是相互獨立的。
2.1 隨機變量的分布參數
均服從瑞利分布,兩者相互獨立,其概率分布函數FX、抽樣公式X分別:
(11)
(12)
式中:R為服從0,1均勻分布的隨機變量;η為分布參數。
(13)
(14)
2) 齒輪相位角θ和間隙相位角θi
均服從0,2π間的均勻分布,概率密度函數和抽樣公式分別為:
(15)
X=2πR
(16)
3) 裝配誤差中各間隙ei
均服從正態分布,抽樣公式和分布參數分別為:
(17)
(18)
式中:μ為均值,σ為標準差。
2.2 動力刀架齒輪嚙合誤差計算
本例分析的某型號動力刀架齒輪系統,其齒輪最大負載轉矩T=40N·m,齒輪采用40Cr,密度為7.87×103kg/m3,彈性模量為2.11×105MPa,泊松比0.28,各級齒輪副重合度系數分別為:1.67、1.80、1.76。該型號齒輪制造商提供的齒輪公差參數如表1所示。
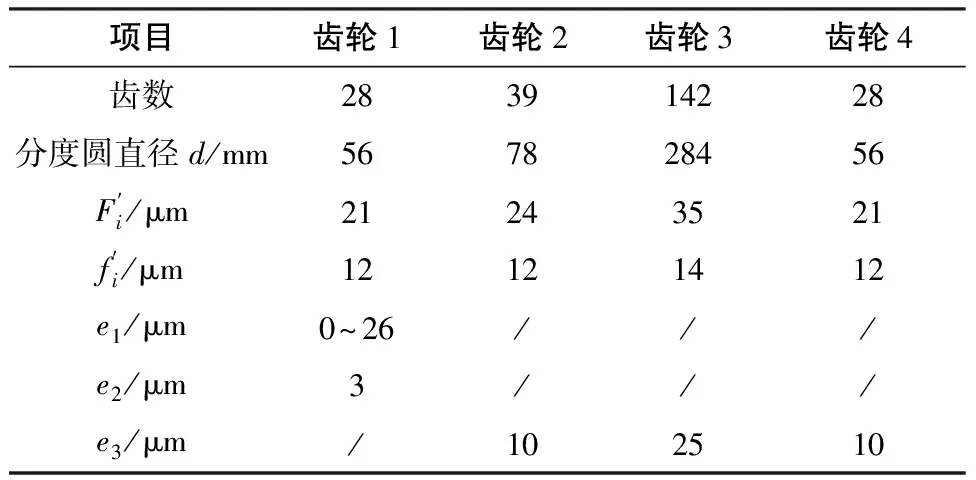
表1 各齒輪主要參數
結合各隨機變量的抽樣函數和分布,本文采用Monte-Carlo法進行了10 000次的隨機抽樣,通過Matlab產生隨機數,根據各項誤差對系統傳動精度的影響關系,對齒輪系統的傳動誤差進行了統計模擬,在一定置信度下,可得該動力刀架齒輪系各齒輪副輪齒嚙合誤差如表2所示,動力刀架齒輪系統最大輪齒嚙合誤差為±6.245 6′。
該型號動力刀架齒輪傳動系統傳動誤差概率分布如圖4所示。應用K-S檢驗法對其正態性檢驗,結果表明齒輪傳動系統傳動誤差服從于正態分布,均值為0.025,方差為3.755 5。
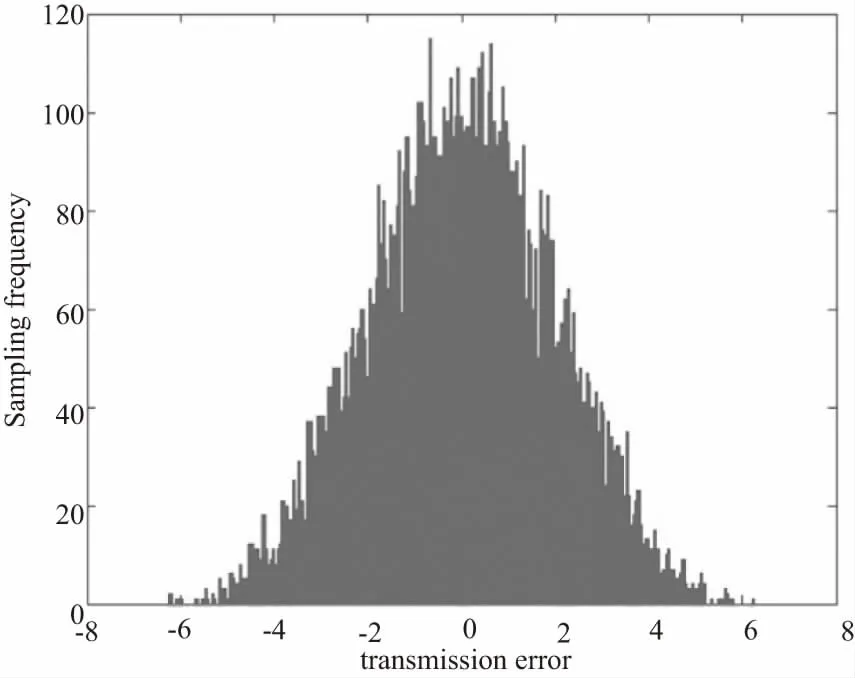
圖4 多級齒輪系總靜態誤差
3 考慮非線性摩擦接觸的動力刀架齒輪系傳動誤差仿真
本節結合有限元法與解析法,選取某工況下齒輪的扭轉變形量作為考量指標,分析動力刀架齒輪系因受載變形產生的傳動誤差。應用SolidWorks建立各級齒輪副三維模型,HyperMesh進行網格劃分,ABAQUS求解接觸非線性問題。
3.1 有限元建模與假設
為提高網格質量,刪除模型的螺栓孔、倒角等小特征,建立各級齒輪副三維模型,并作如下假設:
1) 不考慮軸承的安裝誤差及剛度的影響;
2) 假定齒輪內孔的軸向位置在嚙合過程中始終固定不變。
所建立的齒輪接觸模型,齒部為關鍵部位,網格質量對分析結果影響較大,網格采用C3D8I單元,并對輪齒局部細化[12]。為實現齒輪系的轉動,在主動輪和從動輪的旋轉中心分別建立質量無窮小(如m=1e-9kg)的集中質量點,將集中質量點與齒輪的內孔面通過BEAM梁單元剛性耦合,最終的有限元模型如圖5所示。
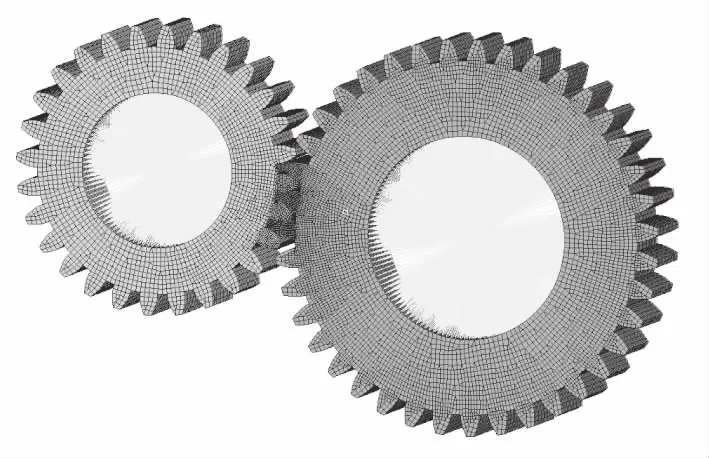
圖5 齒輪副有限元模型
3.2 接觸對定義
本文分析齒輪的齒面接觸屬于強非線性問題,每一對接觸中的力學特性參數是十分重要的數據,在ABAQUS中的接觸設置中,對所有可能接觸的齒面之間設置面-面接觸對。
3.3 邊界條件與載荷步
根據本模型特點,將齒輪嚙合過程設置為2個載荷步:第1個載荷步用來加快計算的收斂速度,實現2個齒輪的壓緊,固定主動輪,賦予從動輪負載轉矩;第2個載荷步用來仿真齒輪的嚙合過程[13],在ABAQUS中賦予主動輪轉速、從動輪負載轉矩,分析類型為瞬態動力學分析。
3.4 非線性摩擦接觸的求解
本文建立的考慮齒面摩擦的齒輪副非線性模型,接觸屬于粘結-滑移的接觸,用拉格朗日摩擦公式需要應用附加變量計算每一個接觸單元的節點,消耗較多計算機資源。而罰函數方法允許接觸表面發生較小“彈性滑動”,并為滑動表面給定一個初始剛度值(稱為罰剛度),該“彈性滑動”的數值與單元特征值相比是一個較小的量。經試算罰函數算法也適用于本文,比拉格朗日算法節省很多的計算機資源,因此本文使用罰摩擦公式求解齒輪的接觸問題,在ABAQUS接觸算法中選擇penalty,設置摩擦系數0.1。
提交模型進行考慮摩擦接觸的非線性仿真計算。
3.5 仿真結果分析
動力刀架齒輪傳動系統齒輪副某工況下,齒輪嚙合應力分析云圖如圖6和圖7所示,位移變形分析云圖如圖8所示。提取各齒輪在負載轉矩作用下分度圓處的變形位移,沿齒寬方向,等距離選取10個齒輪分度圓處點的變形位移,并求其平均值,再由式(7)得各齒輪變形角位移,進而由式(9)和式(10)求得各級齒輪副的傳動誤差和齒輪系統的傳動誤差,結果如表4所示。
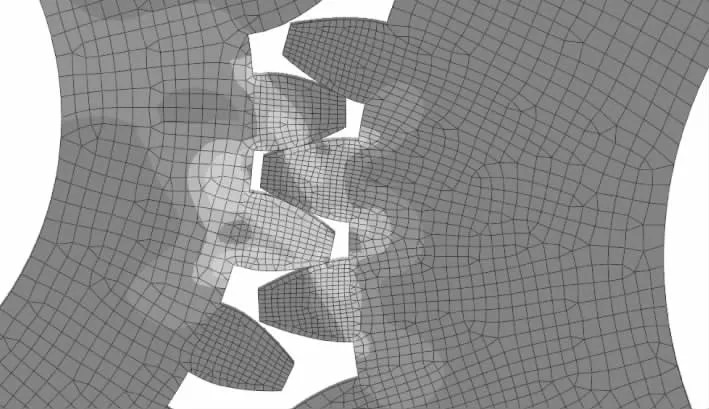
圖6 齒輪副嚙合應力圖
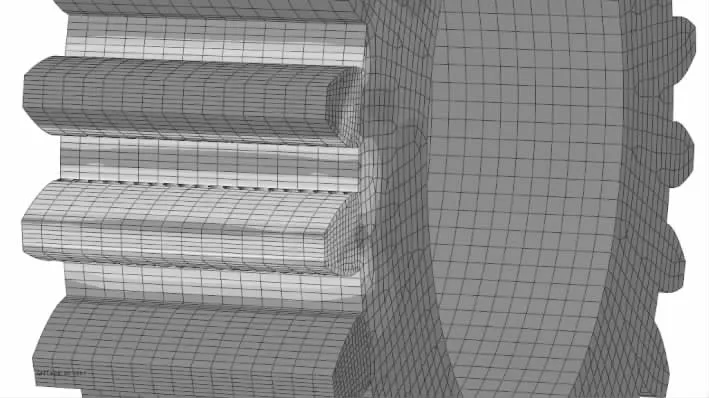
圖7 輪齒局部應力圖
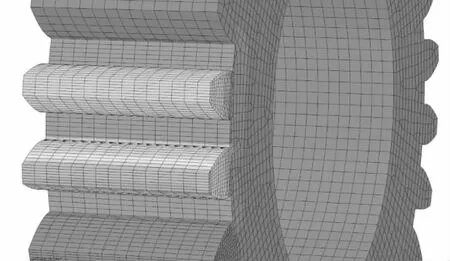
圖8 輪齒局部變形云圖
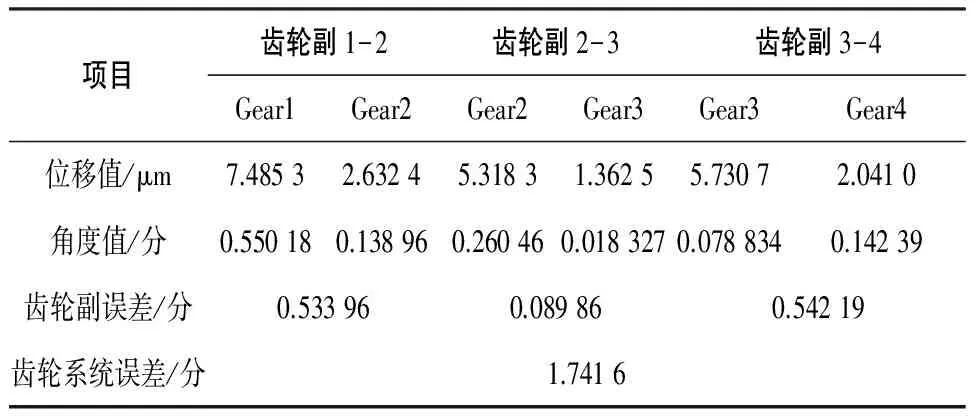
項目齒輪副1-2齒輪副2-3齒輪副3-4Gear1Gear2Gear2Gear3Gear3Gear4位移值/μm7.48532.63245.31831.36255.73072.0410角度值/分0.550180.138960.260460.0183270.0788340.14239齒輪副誤差/分0.533960.089860.54219齒輪系統誤差/分1.7416
因此,該動力刀架齒輪系統受載變形誤差為1.741 6′,輪齒嚙合誤差為±6.245 6′,則該動力刀架齒輪傳動系統的最大傳動誤差為:
TE=E-δ=±6.245 6′-1.741 6′=7.987 2′
4 結語
1) 分析了動力刀架齒輪系傳動誤差影響因素主要包括:齒輪嚙合綜合誤差和輪齒受載變形,建立了齒輪傳動誤差計算模型,推導了多級齒輪傳動系統傳動誤差計算公式。
2) 基于齒輪各項誤差的概率分布,采用Monte-Carlo法對動力刀架齒輪系的嚙合綜合誤差統計模擬,在一定置信度下,確定動力刀架齒輪系最大嚙合綜合誤差為±6.245 6′,通過K-S檢驗法,證明齒輪系統嚙合綜合誤差服從于正態分布。
3) 建立了考慮齒面摩擦的動力刀架齒輪傳動系統非線性有限元模型,通過虛擬仿真技術分析齒輪受載變形,得出輪齒受載變形誤差為1.741 6′,進而得到動力刀架齒輪系最大傳動誤差為7.987 2′。
4) 提出了一種將有限元法與解析法結合的求解輪齒變形誤差的方法,為分析齒輪傳動誤差提供了一種思路。提出用罰函數法求解齒輪非線性接觸問題,有效節省了計算機資源,得到了較好的結果,為齒輪嚙合的非線性建模提供了重要的參考。
參考文獻:
[1] 許麗嬌. 刀架動力傳動系統動力學特性研究及優化[D]. 南京:東南大學,2015.
[2] Jiande Wang, Ian Howard. Finite element analysis of high contact ratio spur gears in mesh[J]. Joumal of Tribology, 2005,127(3):469-483.
[3] Velex P, Bruyère J, Houser D R. Some analytical results on transmission errors in narrow-faced spur and helical gears: influence of profile modifications[J]. Journal of mechanical design, Transaction of the ASME, 2011, 133(3): 1-11.
[4] Tamminana V K, Kahraman A, Vijayakar S. A study of the relationship between the dynamic factors and dynamic transmission error of spur gear pairs[J]. Journal of mechanical design, Transaction of the ASME, 2007, 129(1): 75-84.
[5] A.Andersson, L.Vedmar. A dynamic model to determine vibrations in involute helical gears[J]. Journal of Sound and Vibration, 2003,260(2):195-212.
[6] Zdenek Neusser. Multi-body dynamics based gear mesh models for prediction of gear dynamics and transmission error[R]. Sae World Congress & Exhibition,2010.
[7] 唐進元. 齒輪傳遞誤差計算新模型[J]. 機械傳動, 2008,32(6): 13-14.
[8] 張靖,陳兵奎,康傳章,等. 計及齒面摩擦的直齒輪動力學分析[J]. 振動與沖擊,2012(21): 126-132.
[9] 李忠,韓崇偉,趙宇和,等. 基于概率法與有限元法的火炮方向機齒輪傳動誤差分析[J]. 火炮發射與控制學報,2015(1):58-63.
[10] Smith J D. Gear Noise and Vibration [M]. New York: Marcel Dekker, 2004: 1-20.
[11] 劉剛. 閻石林. 齒輪扭轉嚙合剛度數值計算方法研究[J]. 煤礦機械, 2012, 33(11):34-35.
[12] Chen Y C, Tsay C B. Stress analysis of a helical gear set with localized bearing contact [J]. Finite Elements in Analysis and Design,2002(38):707-723.
[13] 楊佳寧. 伺服轉塔刀架疲勞壽命可靠性分析[D]. 南京:東南大學,2014.
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2020年1期)2020-09-21 09:24:52
電子制作(2018年18期)2018-11-14 01:48:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06