路面附著系數識別方法發展現狀綜述及展望
2018-05-07 08:12:22袁朝春張龍飛陳龍
機械制造與自動化 2018年2期
關鍵詞:模型
袁朝春,張龍飛,陳龍
(江蘇大學 汽車與交通工程學院,江蘇 鎮江 212013)
0 引言
隨著汽車保有量的增加,交通事故發生率也隨之遞增,美國國家高速公路安全委員會(NHTSA)的調研表明,在道路交通事故中,有90%以上的事故是由于駕駛員的過失造成。其中,駕駛過程中人車路信息獲取的難度成為影響交通安全和導致許多交通事故的最主要因素。尤其是在道路附著條件較差及突變的環境下,由于駕駛員對路面的判斷不足,極易導致車輛發生碰撞及側滑。為了減少事故的發生,主動安全系統成為發展的必然趨勢,如ABS、ESP等。對于路面的有效識別,可以使系統實時根據路面附著信息改變控制策略,從而提高主動干預的作用,減少事故的發生。因此,路面識別對于保證安全駕駛具有重要的意義。另外,智能汽車在中高速行駛狀態下,車輛動力學特性、道路-輪胎附著力特性等力學特性對自動駕駛安全的影響作用越發重要,僅依靠空間信息對制動、轉向等執行機構進行決策和控制會引發一系列安全問題,如因雨、冰雪天氣情況多發的車輛追尾碰撞、轉向制動時的側滑和側翻等交通事故。
1 國內外研究現狀
目前國內外的科研人員在路面識別領域持續開展了多年的研究,取得了許多成果。根據路面識別結果可以分為兩種:路面類型識別和路面峰值附著系數辨識,前者是先將路面劃分為多個等級,通過大量試驗獲得每一等級路面相應的參數,再通過識別路面參數對應每一等級路面,間接獲得當前路面的峰值附著系數;后者是直接通過設計模型算法計算出路面峰值附著系數。同樣的,根據路面識別所依據的原理,可以分為兩類:基于原因的識別方法(Cause-Based)和基于效應的識別方法(Effect-Based)[1]路面識別方法的分類見圖1。本文將根據識別原理展開綜述。
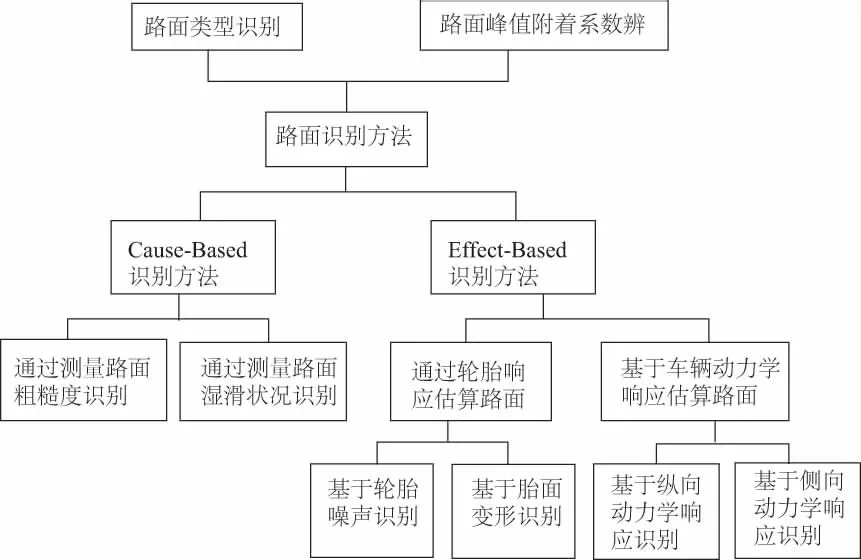
圖1 路面識別方法分類
1.1 Cause-Based識別方法
Cause-Based識別方法需要建立一個反映各個因素與路面附著系數關系的數學模型,通過測量相關因素,利用所設計的數學模型計算路面附著系數的大小[2]。影響路面附著系數的因素主要包括路面類型參數、路面狀態參數、輪胎參數以及整車參數[3],車輛參數可以直接獲得,但路面類型參數及路面狀態參數需要依靠一定的傳感器進行測量。例如,Breuer B等人[4]最早提出利用光學傳感器測量影響路面附著系數的主要物質,在汽車通過地面之前實現提前判斷路面情況;文獻[5]提出利用激光束識別路面,結果表明,其準確率高達98%;文獻[6]通過測量路面對光的散射及吸收狀況,辨識路面上可能降低附著系數的物質,作為判斷路面附著系數變化的依據。由于光學傳感器受環境影響較大,pieter L等人[7]提出采用聲波發射裝置以特定的聲波和發射角度向路面連續發射聲波,分析接收到的聲波頻譜,估算出路面粗糙度,從而識別路面;文獻[8]通過采集路面對電磁波的反射頻譜分析識別路面類型;也有利用紅外傳感器以及溫濕度傳感器通過分析太陽輻射強度對路面溫度的影響,識別準確率可達90%[9];近年來,基于圖像處理和特征識別技術的研究也逐漸增多[10],通過圖像特征及空間頻譜規律對路面進行劃分。文獻[11]提出一種基于攝像機的路面預測方法,穩定性較好,但壽命較短。
Cause-Based識別方法對路面的識別具有預測性,可以在輪胎與路面接觸前識別路面。但都需要加裝額外傳感器,成本較高,硬件復雜,商業推廣價值不大;其次,光學傳感器對工作環境要求苛刻,容易受外界因素影響,魯棒性較差;另外,該類方法需要通過大量的測試試驗采集數據,識別精度依賴于數據的準確性,對未經測試的路面難以準確估算;最重要的是,該類方法主要測量的是影響路面附著系數的兩個因素:路面類型參數、路面狀態參數,并未考慮到輪胎參數及整車參數的變化,其準確度必然隨著車輛的使用及輪胎的磨損而降低。
1.2 Effect-Based識別方法
Effect-Based識別方法是通過測量分析由于路面變化引起的整車響應來估算路面附著系數的大小。該類方法一般無需增加額外的傳感器,且對工作環境要求不高,因此受到很多關注。根據響應的類型,Effect-Based識別方法可以分為兩類:基于輪胎響應識別路面和基于車輛動力學響應識別路面。
a) 基于輪胎響應識別路面
輪胎響應根據響應形式的不同,分為輪胎噪聲響應和胎面變形響應。
1) 通過測量輪胎噪聲識別路面
汽車在行駛過程中輪胎與地面之間產生噪聲,不同道路狀況下輪胎噪聲也會有所差異,通過聲學傳感器采集車輪與路面之間的噪聲,作為識別路面的依據。文獻[11]提出利用麥克風采集噪聲頻率,根據特征與路面進行匹配;Roth等人[12]提出利用聲學傳感器測量輪胎與路面之間的噪聲,從而判別路面的峰值附著系數。但由于輪胎噪聲產生機理比較復雜,受到許多外界不確定性因素的影響,很難據此準確估計路面峰值附著系數。
2) 通過測量胎面變形識別路面
此類方法需要應用胎面變形傳感器,近年來,許多輪胎傳感器已經研究人員用于輪胎變形的測量。Pohl.R等人[13]提出一種固定在輪胎內襯的表面聲波傳感器(SAW),通過胎面接觸單元的機械應變估計路面附著特性。文獻[14]利用無線壓電式傳感器獲得胎面的變形,通過刷子模型獲得路面附著系數,試驗結果表明這種傳感器能夠很好的估計滑移率和路面附著系數;文獻[15]將磁性傳感器嵌入到輪胎胎面中,基于霍爾原理,測量輪胎局部應變及應力,進而識別路面峰值附著系數的大小,試驗表明該傳感器在很小的輪胎縱向力情況下能很好地識別出路面峰值附著系數。但此類傳感器都需要能量自給以及實時數據的無線傳輸,實用價值不大。盧俊輝等[16]提出基于車輪振動的路面識別方法,通過小波分析車輪在不同路面的振動信號進行識別,魯棒性好,但實時性差。
b) 基于車輛動力學響應識別路面
車輛動力學響應又分為縱向動力學響應和側向動力學響應。
1) 通過縱向動力學響應識別路面
目前,國內外對于縱向動力學響應識別路面的研究較多,此類方法都需要根據輪胎力獲得附著率(又稱利用附著系數),再根據車輪轉速、車速信息得到車輪的滑移率。根據定義,計算公式如式(1)、式(2)。
(1)
(2)
式中:FX為輪胎所受縱向力,FZ為輪胎所受垂直載荷,w為車輪轉速,v為汽車縱向速度,R為車輪半徑。
通過對數據點的分析,根據曲線形狀識別路面。多數研究者認為曲線的斜率能夠直接反映出路面附著系數的大小,一般采用最小二乘法或卡爾曼濾波等方法得到曲線的斜率。文獻[17]中F.Gustafsson最早提出基于小滑移率區間μ-s曲線斜率的路面識別方法,研究表明,車輛在驅動工況下,可以利用估計出的曲線斜率來識別不同路面的附著系數。文獻[18-20]利用最小二乘法或kalman濾波器估計曲線斜率,用于估計當前路面附著條件,試驗表明效果較好。此后許多研究者在此基礎上進行了改進。文獻[21]在此基礎上通過帶遺忘因子的遞推最小二乘算法及CUSUM變化檢測算法對路面附著系數進行估算。文獻[22]設計了基于狀態觀測的路面識別方法,通過卡爾曼濾波或滑模變結構輪胎力觀測器,結合刷子輪胎模型,利用遞歸最小二乘法估算路面附著系數。文獻[23]結合車載傳感器和GPS數據通過縱向車輛模型估算,并利用最小二乘法實時估算曲線斜率來識別路面。文獻[24]結合輪胎力學模型和UKF算法對輪胎縱向力和滑移率進行估計,進而得到不同附著系數路面條件下的曲線斜率,通過建立與典型路面之間的映射關系,快速準確地識別路面。
但用該方法在曲線斜率估算過程中需要較多的數據點,因此實時性較差,不適用時變路況,且對數據點的精度有較高的要求,很難適用于實車行駛過程。文獻[25]設計了二階非線性擴張狀態觀測器有效地估計利用附著系數,用簡化的輪胎模型推導出了遞推公式,根據最小二乘原理設計了峰值附著系數估計器。仿真結果表明,估計器能夠快速有效地估計當前路面狀態。文獻[26]介紹了兩種輪胎力的計算方法,并通過估計驅動軸車輪的滑移率和附著率,利用貝葉斯算法估算路面峰值附著系數。文獻[27]采用結合 Dugoff 輪胎模型的非線性三自由度車輛估算模型,建立雙容積卡爾曼濾波估計器,實現路面附著系數的估計。文獻[28]提出基于Dugoff模型和擴增卡爾曼濾波器的路面識別方法,準確性較好。文獻[29]提出獨立于車輛縱向運動的實時路面附著系數估計方法,不需要特定的加速、減速工況,運用動態LuGre輪胎模型,通過施加激勵制動轉矩,利用自適應控制規則和最小二乘法估計實時路面附著系數。文獻[30]采用七自由度車輛動力學模型,結合Burckhardt輪胎模型,提出基于模糊控制算法的路面識別方法。文獻[31]提出基于路面特征因子的識別方法,并給出了7種典型路面的特征因子閾值和區間,根據估算的實時特征因子落入的特征區間作為當前識別的路面狀態,識別準確率高,但是對躍變路面的識別存在局限性。張曉云等人[32]提出一種基于實時滑移率的動態識別方法,并設計了典型路面的動態識別區間;隨后又提出[33-35]基于路面特征系數和基于峰值附著系數變化范圍的路面識別方法,但該類方法精度依賴于估算,實際應用意義不大。文獻[36]提出基于能量法路面附著系數識別方法,構建了針對摩擦制動器作用時的路面附著系數求解模型,效果較好,但對于變路面有待進一步研究。文獻[37]引入接近度的概念,提出基于路面特征參數和防抱制動過程的路面識別方法,通過最大接近度原則識別路面狀態。文獻[38]基于不同車輛動力學模型的路面附著系數估計方法進行了對比,通過仿真及臺架試驗對比,對3種模型提出了改進。
2) 通過側向動力學響應識別路面
文獻[39]提出一種基于先進汽車線控轉向系統的輪胎與路面附著系數估計方法,利用卡爾曼濾波算法設計估計器,在沒有制動工況參與的前提下,估算精度較高。文獻[40]通過側向加速度傳感器信息估算路面附著系數,再基于橫擺角速度偏差及側向加速度偏差進行雙非線性度表征量綜合補償和修正,在實車驗證中實時性和魯棒性較好。文獻[41]一種基于SVM的路面摩擦系數識別方法,可以在不同道路條件下的轉向過程有效地識別路面附著系數。文獻[42]提出基于車輛側向動力學的路面附著系數估計方法,利用DGPS系統測量輪胎橫向力模型參數,結合陀螺儀信息識別路面附著系數,結果表明識別效果實時性較好,對縱向工況要求較低。文獻[43]提出一種基于車輛轉向的路面附著系數估計算法,并通過刷子輪胎模型推導出路面附著系數和車輛轉向的關系。文獻[44]利用擴展卡爾曼濾波器估算車輪側偏角,采用反向傳播神經網絡算法,結合橫擺角速度,判斷路面的附著狀況。文獻[45]建立了非線性刷子輪胎模型和車輛線性模型,基于雙擴展卡爾曼濾波算法,實現對線控汽車輪胎側偏角以及路面附著的估計。
多數研究只考慮車輛縱向或者橫向動力學,估計的路面附著系數偏小,文獻[46]提出結合縱向和側向的輪胎刷子模型,通過線型遞歸最小二乘法來識別,識別精度較高,且對于對開路面有很好的效果。文獻[47]結合了縱向動力學和側向動力學識別方法,通過一定的切換規則提高了估計的精度和魯棒性。
Effect-Based識別方法作為一項隨著ABS和TCS等車輛動力學控制系統的發展而產生的技術,采用車輛本身的動力學參數來對車輪所處路面進行判別的方法,不但能夠采用車輛防滑控制系統固有的傳感器簡化系統結構并降低成本,而且也能夠保證路面的判別的準確性。與Cause-Based識別方法采用直接測量或采用光、電傳感器以及數字圖像分析和頻譜分析的方法相比,具有一定的優勢和更為廣闊的應用前景。
2 存在問題
綜上所述,國內外許多學者在路面識別領域已經做了許多工作并取得一定的成果。但是眾多識別方法各有利弊,通過傳感器對路面參數進行直接測量的識別方法,預測性強、識別準確率高,對于汽車智能化具有很大的作用,但硬件復雜,工作環境要求較高;通過測量輪胎噪聲的識別方法,實時性強,但魯棒性差;通過測量輪胎變形的識別方法,精度較高,但需要無線傳輸、能力自給,成本高;通過曲線形狀進行識別的方法適用于各種工況,但需要的大量數據,實時性不強;根據路面狀態特征值進行識別的方法,魯棒性較高、識別準確率高,但對躍變路面的識別有局限性;通過側向動力學的識別方法,需要GPS,尚未普及,不利于實車應用。綜合利弊,基于車輛響應特性的路面識別方法具有成本低,適用范圍廣,魯棒性好的優點,對于主動安全系統的發揮有著重要的作用。
3 結語
現有的路面識別方法基本滿足了汽車主動安全系統的需求,可以有效提高系統的準確性,達到主動干預的效果。但是多數還停留在仿真階段,實際行駛過程路面及環境復雜多變,如何保證路面識別方法的精度及魯棒性將會是研究的重點。另外,隨著汽車智能化的推廣,路面識別不再是簡單地應用于ABS、ESP等安全系統,而是關系到每個環節。典型的智能汽車包括感知系統、規劃-決策系統、控制系統及執行裝置。感知系統應用車載雷達、攝像頭等傳感器,不僅需要獲得車輛姿態信息,還需要提前感知路面信息,為科學的規劃-決策提供依據,這也對路面識別的預測性提出了很大的要求。文獻[48]提出基于機器視覺的路面狀態識別,通過攝像頭提取路面信息,根據顏色和紋理特征識別路面,并通過幾種典型路面的試驗分析得到了驗證。基于機器視覺的路面識別方法的優勢在于探測范圍廣、預測性強,由軟件直接控制,便于后續升級,必將是未來智能車的主流,但是處理光線環境變化以及排除圖像干擾信息的問題會是一大難點,有必要研究抗干擾能力強和對路面圖像識別準確率更高的方法。
另外,基于車輛動力學響應的識別方法與基于圖像的識別方法的有效結合,可以充分解決實時性與準確性沖突的問題,基于車輛動力學響應的識別方法準確地識別路面為基于圖像的識別方法提供參考,基于圖像的識別方法根據攝像機所拍圖像特征判斷路面的變化趨勢,包括顏色、紋理、形狀、空間關系等特征,通過隱馬爾科夫模型可以提前預測路面變好或者變壞,對后續路面進行修正,為智能汽車的感知及決策系統提供依據。
參考文獻:
[1] 余卓平,左建令,張立軍. 路面附著系數估算技術發展現狀綜述[J]. 汽車工程, 2006,28(6): 546-549.
[2] 漆燕. 汽車防撞預警相關路面狀態識別的研究[D]. 武漢: 華中科技大學, 2013.
[3] 陳明. 汽車主動防撞預警系統的路面識別研究[D]. 長春: 吉林大學, 2011.
[4] Breuer B,Eichhorn U,Roth J. Measurement of tire/road-friction ahead of the car and inside the tire[C]//International Symposium on Advanced Vehicle Control,Yokohama,Japan,1992.
[5] John Laurent,Mario Talbot,Michel Doutcet,Road surface inspection using laser scanners adapted for the high precision 3D measurements of large fiat surfaces[C]// 3-D Digital Imaging and Modeling,International Conference on RecentAdvances, May 12-15,1997:303-310.
[6] 趙祥模,馬榮貴,施維穎. 基于PSD的路面粗糙度快速檢測方法研究[J]. 大氣與環境光學學報,2004, 17 (2) :58-60.
[7] Pieter L,Swart,Beatrys M.Lacquet.An Acoustic Sensor System for Determination of Macroscopic Surface Roughness[J]. IEEE Transactions on Instrumentation and Measurement, 1996, 45(5):879-884.
[8] Brgeson J. Sensor data fusion based estimation of tire-road friction to enhance collision avoidance[C]//Tampere Universityof Technology, 2010.
[9] 盧俊輝,王建強,李克強,等. 基于路面溫度和太陽輻射強度的路面狀態識別方法[J]. 農業機械學報, 2010, 11(5): 21-23.
[10] 潘玉斌. 商用車牽引力控制系統的路面識別算法研究[D]. 長春:吉林大學, 2008.
[11] Holzmann F, Bellino M,Siegwart R,et al. Predictive estimation of the road-tire friction coefficient[J]. IEEE International Conference on Control Applications 2006: 885-890.
[12] Eichhorn U, Roth J. Prediction and monitoring of tire/road-friction [C]//FISITA Congress, 1992: 67-74.
[13] Alfred Pohl, R Steindl,L Reindl. The Intelligent tire utilizing passive SAW Sensors—Measurement of tire friction [J]. IEEE Trans. Instrum,1999,48(6): 1041-1046.
[14] Erdogan Gurkan,Alexander Lee,Rajamani Rajesh.Estimation of Tire-Road Friction Coefcient Using a Novel Wireless Piezoelectric Tire Sensor[J]. IEEE Sensors Journal, 2011, 11(2): 267-279.
[15] Tuononen A. On-board estimation of dynamic tyre forces from optically measured tire carcass deflections[J]. International Journal of Heavy Vehicle Systems, 2009(16): 362-378.
[16] 盧俊輝,巫世晶. 基于車輪振動的路面實時識別研究[J]. 振動與沖擊, 2008,166 (4): 19-22.
[17] Gustafsson F. Estimation and Change Detection of Tire-road Friction Using the Wheel Slip[J]. IEEE International symposium on computer-aided control system design, 1996,15(18):99-104.
[18] Yi K,Hedrick K,Lee S C. Estimation of Tire-road friction using observer based identifiers[J]. Vehicle System Dynamics, 1997, 31(4):233-261.
[19] Li K, Misener J. On-board road condition monitoring system using slip-based tyre road friction estimation and wheel speed signal analysis [J]. Proc. IMech E ,Part K: J .Multi-body Dynamics,2007,221(1):129-146
[20] Jorge V, Brigitee d, Michel F et al. A diagnosis-based approach for tire-road forces and maximum friction estimation[J]. Control Engineering Practice, 2011,19(2):174-184.
[21] 趙又群,林棻. 基于虛擬試驗的路面附著系數估計[J]. 吉林大學學報(工學版), 2011,41(2): 22-28.
[22] 張進. 基于路面識別的車輛縱向動力學控制[D]. 長春:吉林大學, 2015.
[23] 龔節坤. 基于實時路面附著條件的跟馳模型研究[D]. 哈爾濱:哈爾濱工業大學, 2015.
[24] 林棻,黃超. 采用UKF算法估計路面附著系數[J]. 哈爾濱工業大學學報, 2013,45(7): 121-126.
[25] 吳利軍,王躍建,李克強. 面向汽車縱向安全輔助系統的路面附著系數估計方法[J]. 汽車工程, 2009 ,31(3): 239-243.
[26] 趙立軍,鄧寧寧,葛柱洪,等. 四輪驅動車輛路面附著系數實時估計[J]. 哈爾濱工業大學學報, 2014,46 (11): 42-46.
[27] 解瑞春. 基于信息融合技術的車輛行駛狀態估計算法研究[D]. 錦州: 遼寧工業大學, 2015.
[28] Chen Yan, Wang Junmin. Vehicle Longitudinal Motion Independent Real-Time Tire-Road Friction Coefficient Estimation [J]. 49th IEEE Conference on Decision and Control,2010,15(17): 2910-2915.
[29] Zhu tianjun Zong-Changfu. The Road Friction Coefficient Estimation Based on Extended Kalman Filter[C]//Intelligent Systems and Applications, 2009. ISA 2009. International Workshop on, 2009: 1-4.
[30] Feng W,Xiao-bin F,Ye-ming Z, et al. Fuzzy Identification Based on Tire/road Adhesion Feature[J]. Computer Aided Drafting,design and Manufacturing, 2015,25(1): 62-67.
[31] 王博,孫仁云. 基于狀態特征因子的路面識別方法研究[J]. 汽車工程, 2012,34(6): 506-510, 522.
[32] 張曉龍,孫仁云,李鋒,等. 基于動態識別區間的路面識別方法研究[J]. 湖北汽車工業學院學報, 2014,28(3): 21-24.
[33] 張曉龍,孫仁云,劉長偉,等. 基于路面特征系數的路面識別方法研究[J]. 中國測試, 2015,41(8): 31-35.
[34] 張曉龍,孫仁云,葛恒勇,等. 基于峰值附著系數變化范圍的路面識別研究[J]. 科學技術與工程, 2015,15(11): 117-121, 130.
[35] 張曉龍,孫仁云,李鋒,等. 基于平均附著系數的路面識別方法研究[J]. 中國測試, 2014,40(6): 99-103.
[36] 王麗. 基于能量法的路面附著系數識別方法研究[D]. 長春: 吉林大學, 2012.
[37] 齊志權,王寶鋒,裴曉飛,等. 基于路面特征參數和制動防抱調節特征的路面識別方法[J]. 汽車工程, 2014,36(3): 310-315.
[38] Fodor D,Enisz K,Doman R,Toth P. Tire Road Friction Coefficient Estimation Methods Comparison Based on Different Vehicle Dynamics Models[J].Vehicle Power and Propulsion Conference, 2011: 1-4.
[39] 鄭宏宇,陳國迎,孫琳琳,等. 基于線控轉向系統的路面參數估計[J]. 吉林大學學報(工學版), 2014,44(2): 292-295.
[40] 李亮,朱宏軍,陳杰,等. 用于汽車穩定性控制的路面附著識別算法[J]. 機械工程學報, 2014,50(2): 132-138.
[41] Shoutao li Xinglong Pei,Yongxue Ma,et al. A New Road Friction Coefficient Estimation Method Based on SVM [J]. International Conference on Mechatronics and Automation, 2012: 1910-1914.
[42] Jin-oh hahn,R Rajamani. GPS-Based Real-Time Identification of Tire-Road Friction Coefficient[J]. IEEE Transactions on Control Systems Technology, 2002, 10(3): 331-343.
[43] Sanghyun Hong, J. Karl Hedrick. Tire-Road Friction Coefcient Estimation with Vehicle Steering [J]. IEEE Intelligent Vehicles Symposium, 2013, 36(1):1227-1232.
[44] 陳無畏,劉翔宇,黃鶴,等. 車輛轉向工況下的路面附著系數估計算法[J]. 汽車工程, 2011,33(6): 521-526.
[45] 李明. 線控汽車輪胎側偏角和路面附著系數估算算法研究[D]. 長春:吉林大學, 2011.
[46] Choi M, Oh J.J.,Choi-S.B.. Linearized Recursive Least Squares Methods for Real-Time Identification of Tire-Road Friction Coefficient[J]. IEEE Transactions on Vehicular Technology, 2013, 62(7): 2906-2918.
[47] Changsun Ahn,Huei Peng,Tseng H.E.. Robust estimation of road friction coefficient[J].American Control Conference, 2011, 21(1): 3948-3953.
[48] 李虹. 基于機器視覺路面狀態識別關鍵技術研究[D]. 長春: 吉林大學, 2009.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19