基于圖像檢測技術(shù)的自動扶梯制動距離檢測裝置*
2018-05-05 08:38:46黃紹倫
機電工程技術(shù) 2018年4期
關(guān)鍵詞:檢測
任 馨,黃紹倫,佘 昆
0 前言
自動扶梯與自動人行道的制停距離檢測[1-4],一般的做法是采用粉筆作標記[5]、目測起始時刻,卷尺測量距離等傳統(tǒng)的人工測量方法。其弊端有兩點:一是測量精度差,最主要原因在于認定制停距離起始時刻是通過人為感官配合實現(xiàn)的,同一臺自動扶梯會因不同的測試人員出現(xiàn)不同的測試結(jié)果,影響檢驗機構(gòu)報告的權(quán)威性;二是測量的重復性差,由于測試人員按下計時秒表的速度難免會有偏差,同一臺自動扶梯或自動人行道即使同一名測試者仍然可能會有不同的測試結(jié)果,尤其是處于判定是否合格的邊界值時,這種情況更讓測試人員無所適從。
為了克服上述弊端,本文設(shè)計了一種采用圖像檢測技術(shù)實現(xiàn)的制動距離檢測裝置,利用電流傳感器捕獲和識別扶梯的制動觸發(fā)信號;利用便捷安裝于梯級上并隨著梯級移動的圖像檢測傳感器采集圍裙板金屬表面的圖像信息,經(jīng)過內(nèi)置的DSP處理器對采集的圖像進行匹配運算,最終換算成實際制動距離信息,二者均通過無線信號將數(shù)據(jù)上傳至平板電腦,并實時顯示測試數(shù)據(jù)過程和最終結(jié)果。
1 圖像檢測技術(shù)的基本原理
被測的圍裙板金屬平面在運動的過程中,通過快速連續(xù)采集一組固定時間間隔的微圖像,如果在采集圖像時間間隔很短的情況下,其相鄰前后兩組圖像中必然會存在相同的圖片信息。這部分相同的圖片信息,在圖像的位置變化體現(xiàn)了被測圍裙板金屬平面在該時間間隔內(nèi)的位移狀態(tài)[6],即移動方向和移動距離。
具體算法如下。
假設(shè)相鄰的兩幅采集圖像為P1、P2,其中P1為比對圖,P2為搜索圖,從P1的中心位置提取16×16的子集T為模板圖。如圖1所示,將T疊放在P2上進平移,以求在P2搜索圖上最佳匹配T的部分對應(yīng)的位置。模板圖T在P2覆蓋下的圖像成為P2的子圖P2x,y。
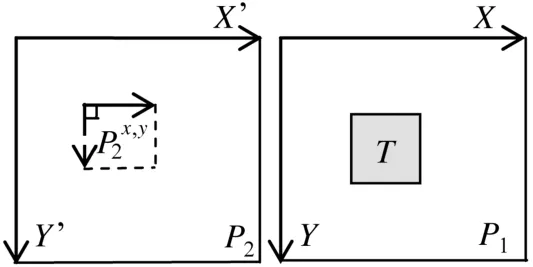
圖1 最佳匹配搜索示意圖
為了尋找最佳的匹配位置,定義搜索相似度D(x,y)為子圖P2x,y與模板圖T之間的像素差值的平方和,如公式(1)所示。當D(x,y)的值最小,代表子集與模板之間的差距越小,其相似程度越高,當D(x,y)為“0”時代表圖像完全匹配。

其中,P2x,y(i,j)和T(i,j)分別是搜索圖P2x,y與模板圖T在位置(i,j)處的灰度值,1≤i,j≤16。
所以,求解最佳匹配點的問題可以轉(zhuǎn)化為,遍歷所有的(i,j)位置,求出D(x,y)最小值。算法過程如下。
(1)Dm(x,y)定義為最佳匹配點。將x=1,y=1時的D(1,1)設(shè)定為初始相似度,即初始化Dm(x,y)=D(1,1)。
(2)從(1,1)位置開始,依次掃描相鄰位置的D(x,y),并與 Dm(x,y)比較,若 D(x,y)≤Dm(x,y)則令 Dm(x,y)=D(x,y),該坐標(x,y)替換D0(x,y)的坐標;反之,則忽略并直接進入下一個掃描點繼續(xù)計算比較。
(3)遍歷所有(x,y)后,將得到最佳匹配點Dm(x,y)的坐標(x,y),使它與中心位置相比,即可知道被測扶梯圍裙板金屬平面在圖像平面的x和y方向上的前后兩幀圖像之間的相對位移。由于圖像平面(像素)與物理尺寸存在的比例關(guān)系固定,進而可很方便地換算成物理空間的物理位移值。
2 檢測裝置的總體設(shè)計
基于圖像檢測技術(shù)的自動扶梯制動距離檢測裝置由無線圖像檢測模塊、無線電流傳感器模塊和平板電腦軟件組成。
無線圖像檢測模塊負責實時采集和計算相對位移量,定時傳輸一組扶梯參數(shù)數(shù)據(jù)包到無線接收模塊;無線電流傳感器模塊用于夾持在制動器的供電線路上,當電梯斷開安全回路,制動器失電抱閘開始制停,無線電流傳感器獲取并分析識別制停信號的真實起始時刻;二者同時無線傳送至平板電腦,無線接收模塊將接收到的兩路數(shù)據(jù)包通過USB接口與平板電腦進行通信,平板電腦負責對檢測數(shù)據(jù)做進一步的濾波處理和數(shù)據(jù)分析,得到制停距離、制停加/減速度、梯級速度等數(shù)值結(jié)果。
3 檢測裝置的硬件設(shè)計
(1)圖像檢測模塊元件選型及設(shè)計
圖像檢測傳感器硬件選用PixArt Imaging Inc.公司的PMW3360DM-TDQU傳感器,具有12 000 CPI的可編程圖像分辨率和12 000 fps的采樣率,自帶IR-LED紅外調(diào)制激光發(fā)射。配合采用LE19-LSI型PC光學透鏡組件接收反射光圖像信息,通過四線SPI接口使模塊MCU固定時間間隔獲得圖像數(shù)據(jù),進而求出單位時間內(nèi)的位移量[7]。
(2)電流傳感器模塊設(shè)計
為了現(xiàn)場安裝方便,電流傳感器采用鉗式電磁感應(yīng)傳感器,使用時卡鉗在制動器的工作電源線上。根據(jù)國標GB 16899的要求,由于制動器必須是失電動作型,因此在制動器抱閘制動前,電流鉗能感生電流;制動器抱閘制動時,電源失電,電流鉗感生電流丟失,形成信號差。通過I-U轉(zhuǎn)換電路轉(zhuǎn)換成電壓信號采集至模塊單片機,進而發(fā)送信號至平板電腦軟件。
(3)無線模塊的設(shè)計
無線模塊采用無線通信采用Nordic的NRF24L01+單片射頻收發(fā)芯片,工作于2.4~2.5 GHz ISM頻段,數(shù)據(jù)傳輸速率高達2 Mbit/s,且經(jīng)過PA射頻功率放大,與平板電腦程序?qū)崿F(xiàn)超過100 m的長距離的數(shù)據(jù)互傳。
4 檢測裝置的軟件設(shè)計
(1)制動起始時刻的識別

圖2 總體設(shè)計架構(gòu)

圖3 平板電腦軟件界面
當電流鉗卡鉗在制動器工作電源時,感生電流經(jīng)過I-U轉(zhuǎn)換電路得到的是50 Hz正弦波Uzd,送至模塊AD實現(xiàn)定間隔實時采樣。為了更加準確辨識制動器制動起始時刻,減少誤判,算法上設(shè)計成同時監(jiān)測Uzd的斜率△Uzd是否大于上一周波的最大斜率值及滑窗均值下降兩個條件[8]。
①監(jiān)測Uzd的斜率△Uzd是否大于上一周波的最大斜率值,計算方法采用式(2):

其中,Uzd代表模塊AD的電壓值,下標k代表第k個正弦波周期,上標i代表第k個正弦波周期中第i個順序采樣點。
當△Uzd[k](i)>△Uzd[k-1]max時,則記錄該采樣時刻為疑似抱閘時刻。
②為了應(yīng)對電壓不穩(wěn)或電壓跌落異常事件,采用20 ms的絕對值均值平移滑窗去確認抱閘時刻。計算方法如式(3)所示:

當制動器處于松閘狀態(tài),制動器電源保持供電,此時20 ms的滑窗周期內(nèi)的采樣點絕對值累加和趨向于一個確定值,并且必定不等于零。當該值接近或者等于零時,則證明制動器電源失電抱閘。可以確定為一個抱閘事件,并且可以確定原疑似抱閘時刻為真實抱閘時刻。
此時將通過無線信號發(fā)送至平板電腦,并且將疑似抱閘時刻和確認抱閘時刻的時刻差作為信息之一傳輸給平板軟件,用于制動距離位移的真實時刻數(shù)據(jù)對準。
(2)制動距離計算
經(jīng)過無線圖像檢測模塊,平板電腦可以得到一組與時間相關(guān)的微小固定間隔的位移量以及對應(yīng)的時間戳序列。通過上述制動起始時刻的識別、數(shù)據(jù)對準和位移求和,即可得到實際的制動距離。
5 試驗測試
由于目前尚未有統(tǒng)一的標定扶梯制動距離的測量儀器測量方法,而人工識別和測試扶梯制動距離往往可重復性較差,因此改為從該裝置的扶梯梯速測試和制動距離穩(wěn)定性兩方面考察實用性。受測對象為一臺0.5 m/s梯速、4.2 m提升高度的自動扶梯。裝置設(shè)置采用12 000 CPI分辨率、12 000 fps采樣速率、20 ms抱閘識別確認滑窗和2 Mbit/s無線傳輸速率。測量扶梯速度準確度和制動距離穩(wěn)定性如表1和表2所示。

表1 扶梯速度測試結(jié)果

表2 制動距離穩(wěn)定性測試結(jié)果
距離是速度的積分,其誤差正比于速度誤差。從表1可以看出,對扶梯速度測量中,偏差很小。從表2可以看出,經(jīng)過該裝置測試,同一臺自動扶梯的制動距離測試結(jié)果穩(wěn)定性較好。
6 結(jié)語
本文設(shè)計了一款采用圖像檢測技術(shù)完成自動扶梯的制停距離、梯級速度、加/減速度測量的裝置。通過電流傳感器模塊捕獲和識別扶梯的制動觸發(fā)信號;利用便捷安裝于梯級上并隨著梯級移動的圖像檢測模塊采集圍裙板金屬表面的圖像信息,最終得到扶梯制動距離參數(shù)。整個測量過程操作簡單、可信度高、實用性強,為自動扶梯制動距離檢測提供了一種新的裝置。
參考文獻:
[1]GB 16899-2011.自動扶梯和自動人行道的制造與安裝安全規(guī)范[S].
[2]TSG T7007-2016.電梯型式試驗規(guī)則[S].
[3]王俊龍,許林.自動扶梯制動安全性能檢測研究[J].現(xiàn)代制造技術(shù)與裝備,2013(04):27-28.
[4]潘相晨.自動扶梯的制停距離[J].中國特種設(shè)備安全,2012,28(12):47-48.
[5]張鐵軍,林峰.一種自動扶梯三參數(shù)檢測儀[P].中國專利:CN203432811U.2014.
[6]王寧,賈志龍,李莉君.基于光電技術(shù)的速度測量方法[J].物理實驗,2014,34(03):10-12.
[7]黃輝,傅惠南,庫才高.基于光學鼠標傳感器的中遠距離微位移測量裝置的設(shè)計[J].機械制造與自動化,2012,41(06):18-20.
[8]馮如鶴,馮密羅,孔金生.基于電流變化率的短路檢測保護方法[J].煤礦機械,2008(05):171-173.
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:36
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:34
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:50
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:48
