獼猴桃采摘機(jī)械手末端執(zhí)行機(jī)構(gòu)的設(shè)計(jì)
2018-05-02 12:19:42王宜磊易柳舟
食品與機(jī)械 2018年1期
關(guān)鍵詞:機(jī)械
王宜磊 - 陳 霖 易柳舟 - 魏 鑫 唐 建
(四川農(nóng)業(yè)大學(xué)機(jī)電學(xué)院,四川 雅安 625000)
隨著科技的發(fā)展,機(jī)械采摘方面也在不斷發(fā)展,水果采摘機(jī)械手也在廣泛使用中,不同果蔬的生長(zhǎng)特點(diǎn)和采摘要求不同,采摘的方式也不同,在末端執(zhí)行機(jī)構(gòu)上也存在差異[1-3]。現(xiàn)階段獼猴桃多采用棚架式結(jié)構(gòu)栽培,生長(zhǎng)環(huán)境標(biāo)準(zhǔn),果實(shí)垂直于藤蔓上面,底部空間較大,不受枝干、樹(shù)葉、果實(shí)等干擾,有利于采摘?jiǎng)幼鞯膶?shí)施[4-5]。采摘末端執(zhí)行器從果實(shí)兩側(cè)抓取,左右翻轉(zhuǎn)實(shí)現(xiàn)果柄分離,但是并沒(méi)有利用好下方空間,也沒(méi)有考慮對(duì)相鄰果實(shí)的影響;劉繼展等[6]對(duì)番茄果柄折斷特性進(jìn)行了研究,為果實(shí)采摘提供了依據(jù);凌行方[7]研究的“一種果品采摘機(jī)械手”采用鉗刀剪切進(jìn)行果實(shí)摘取,但存在實(shí)際操作困難,刀片容易損傷果實(shí)表皮的問(wèn)題。從目前對(duì)獼猴桃采摘機(jī)器人的研究來(lái)看,果柄分離裝置主要有2種:① 采用切斷方式,即利用切刀將獼猴桃果柄直接切斷,這種方式需要對(duì)切斷點(diǎn)進(jìn)行精準(zhǔn)的定位,同時(shí)機(jī)械手腕還需要有足夠靈活的自由度進(jìn)行調(diào)節(jié),該方法能夠提高采摘的效率,但采摘風(fēng)險(xiǎn)大,控制不精準(zhǔn);② 利用機(jī)械手的連桿機(jī)構(gòu)控制機(jī)械手旋轉(zhuǎn),通過(guò)扭力實(shí)現(xiàn)果柄分離,避免了剪切時(shí)錯(cuò)位對(duì)果實(shí)的影響,機(jī)械式結(jié)構(gòu)控制簡(jiǎn)單。
為了實(shí)現(xiàn)獼猴桃在采摘過(guò)程中減小果實(shí)損傷,以及提高抓取的穩(wěn)定性,本研究設(shè)計(jì)的獼猴桃采摘機(jī)械手末端執(zhí)行機(jī)構(gòu)是一種能夠適應(yīng)獼猴桃生長(zhǎng)環(huán)境、枝條結(jié)構(gòu)進(jìn)行抓取和采摘的末端執(zhí)行機(jī)構(gòu)。機(jī)械采摘末端執(zhí)行機(jī)構(gòu)充分利用棚架底部的富余空間,采用鉗式組合、四指抓取,在機(jī)械手指表面貼附有壓力傳感器,從下方接近果實(shí),四指包絡(luò)抓取果實(shí)中部。通過(guò)末端執(zhí)行機(jī)構(gòu)旋轉(zhuǎn),使獼猴桃果實(shí)與果柄快速分離。
1 獼猴桃采摘機(jī)械手末端執(zhí)行機(jī)構(gòu)的設(shè)計(jì)方案
1.1 設(shè)計(jì)要求
本裝置針對(duì)獼猴桃進(jìn)行采摘,普通果實(shí)的大小一般為長(zhǎng)6 cm,寬3 cm[8],在采摘過(guò)程中,針對(duì)果實(shí)規(guī)格的差異,要保證有足夠大的力夾緊果實(shí)以及在抓取過(guò)程中不至于從旁邊漏出,要求機(jī)械手指同步運(yùn)動(dòng),采用四指抓取;在果柄分離時(shí)需要保證抓取的力不能太小,保證在旋轉(zhuǎn)過(guò)程中果實(shí)不隨手指相對(duì)滑動(dòng),同時(shí)夾取力不能過(guò)大而損傷果實(shí),采用上下抓取方式,結(jié)果表明果實(shí)近似球形,球度為0.84,果實(shí)損傷壓力不宜大于15 N(對(duì)應(yīng)弧形壓頭的壓強(qiáng)為18.75 kPa),果實(shí)采摘過(guò)程中最大壓力6.35 N,對(duì)應(yīng)壓強(qiáng)為12.53 kPa,才能保證獼猴桃果實(shí)的無(wú)損采摘[9-10]。另外,采摘機(jī)械手末端執(zhí)行機(jī)構(gòu)還需滿足結(jié)構(gòu)簡(jiǎn)單、體積小巧、操作方便等要求[11-12]。
1.2 末端執(zhí)行機(jī)構(gòu)總體結(jié)構(gòu)設(shè)計(jì)
設(shè)計(jì)的獼猴桃采摘機(jī)械手末端執(zhí)行機(jī)構(gòu)由夾持裝置、自由伸縮裝置、旋轉(zhuǎn)裝置、傳感器及控制裝置和驅(qū)動(dòng)電機(jī)等組成,見(jiàn)圖1。
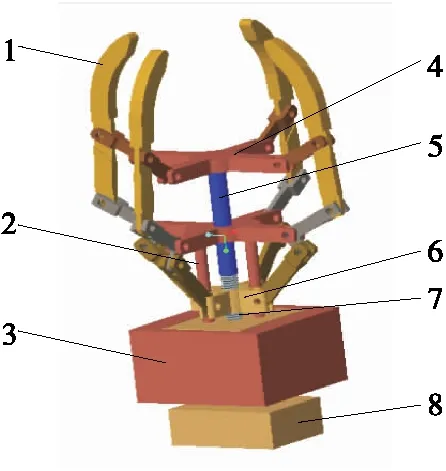
1. 采摘手指 2. 固定桿 3. 電機(jī)殼 4. 支撐架 5. 絲杠 6. 連接件 7. 絲杠電機(jī) 8. 旋轉(zhuǎn)用電動(dòng)機(jī)
圖1 獼猴桃采摘機(jī)械手末端執(zhí)行機(jī)構(gòu)
Figure 1 Kiwi fruit Picking manipulator Terminal actuator
獼猴桃機(jī)械采摘末端執(zhí)行機(jī)構(gòu)的夾持裝置設(shè)計(jì)需要有效地夾住獼猴桃的外圍,并盡量保證受力均勻且不至于滑落。夾取裝置的運(yùn)動(dòng)主要通過(guò)絲杠電機(jī)提供動(dòng)力,其前端的工作手指分別安裝在由2根桿件鉸接與固定的四角裝置上,電機(jī)的轉(zhuǎn)動(dòng)實(shí)現(xiàn)耳片的上下運(yùn)動(dòng),實(shí)現(xiàn)手指的張開(kāi)與收緊。四角裝置的直徑為60 mm,抓取手指帶有一定的弧度,能更好地與獼猴桃外表面貼合,同時(shí)手指的內(nèi)側(cè)貼有壓力傳感器,當(dāng)壓力達(dá)到預(yù)設(shè)值時(shí)電機(jī)停止工作,以防止抓取壓力過(guò)大壓傷果實(shí)。
針對(duì)以上2種獼猴桃采摘果柄分離方式存在的弊端,在原有的通過(guò)機(jī)械手旋轉(zhuǎn),利用扭力實(shí)現(xiàn)果柄分離的基礎(chǔ)上進(jìn)行改進(jìn),研制出了如圖2所示的果柄分離裝置。
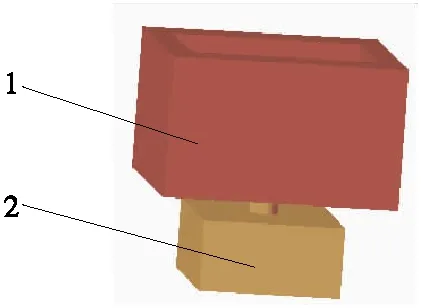
1. 電機(jī)殼 2. 采摘手部分旋轉(zhuǎn)用電機(jī)圖2 獼猴桃果柄分離裝置Figure 2 The separating device of kiwi fruit handle
果柄分離裝置是將驅(qū)動(dòng)手指的電機(jī)嵌入一殼體中,與此構(gòu)成一個(gè)整體,再通過(guò)伺服電機(jī)帶動(dòng)殼體旋轉(zhuǎn),從而帶動(dòng)夾持裝置整體旋轉(zhuǎn),實(shí)現(xiàn)獼猴桃果實(shí)與果柄相對(duì)轉(zhuǎn)動(dòng),使果柄分離。其次,末端執(zhí)行機(jī)構(gòu)變的較細(xì)長(zhǎng),整體結(jié)構(gòu)的最大寬度為9.75 cm,更好地適應(yīng)了獼猴桃果實(shí)生長(zhǎng)密集特性下的采摘。
1.3 獼猴桃采摘機(jī)械手末端執(zhí)行機(jī)構(gòu)工作原理
獼猴桃采摘機(jī)械手末端執(zhí)行機(jī)構(gòu)采摘流程見(jiàn)圖3。工作時(shí),通過(guò)采摘手末端的圖像識(shí)別技術(shù)確定獼猴桃果實(shí)所在位置,絲杠電機(jī)7通過(guò)旋轉(zhuǎn)使連接件6做上下運(yùn)動(dòng),從而驅(qū)動(dòng)采摘手指1的張開(kāi),接觸獼猴桃果實(shí)后絲杠電機(jī)開(kāi)始反向旋轉(zhuǎn),手指開(kāi)始夾緊果實(shí)。為了實(shí)現(xiàn)獼猴桃果實(shí)采摘過(guò)程中減少磨損,在4個(gè)手指的內(nèi)表面貼附貼片式壓力傳感器,控制夾持裝置夾取獼猴桃時(shí)的壓力,避免獼猴桃在采摘過(guò)程中對(duì)其外表及內(nèi)部結(jié)構(gòu)造成刮傷和夾傷,當(dāng)夾取壓力達(dá)到設(shè)定的壓力值時(shí)電機(jī)停止運(yùn)轉(zhuǎn),不再繼續(xù)夾緊果實(shí)。此時(shí)旋轉(zhuǎn)電機(jī)8開(kāi)始運(yùn)轉(zhuǎn),電機(jī)7安裝在電機(jī)殼3中,旋轉(zhuǎn)電機(jī)帶動(dòng)整個(gè)夾持裝置做旋轉(zhuǎn)運(yùn)動(dòng),電機(jī)8旋轉(zhuǎn)一定角度后果柄已基本分離,再由機(jī)械臂向下拉扯,從而實(shí)現(xiàn)采摘的徹底性。
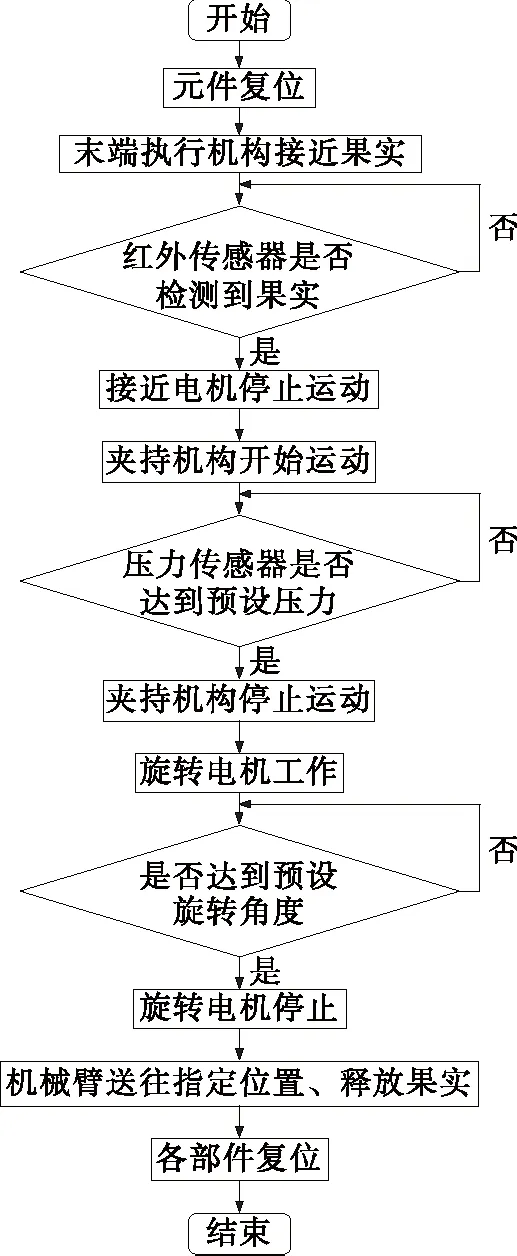
圖3 獼猴桃采摘機(jī)械手末端執(zhí)行機(jī)構(gòu)工作流程圖Figure 3 The work flow chart of the end actuator of kiwi fruit picking manipulator
2 獼猴桃采摘機(jī)械手末端執(zhí)行機(jī)構(gòu)的運(yùn)動(dòng)分析
2.1 末端執(zhí)行機(jī)構(gòu)運(yùn)動(dòng)的理論分析
獼猴桃采摘機(jī)械手末端執(zhí)行機(jī)構(gòu)四指的運(yùn)動(dòng)依靠絲杠電機(jī)轉(zhuǎn)動(dòng)帶動(dòng)連接件6上下運(yùn)動(dòng),從而實(shí)現(xiàn)四指的運(yùn)動(dòng),機(jī)械手指中的各桿件繞著各鉸接點(diǎn)做不完整圓周運(yùn)動(dòng)。末端執(zhí)行機(jī)構(gòu)手指內(nèi)表面貼附壓力傳感器,保證抓取時(shí)有足夠的抓取力,在抓取和扭轉(zhuǎn)時(shí)不至于產(chǎn)生滑動(dòng)摩擦,而且壓力小于果實(shí)破壞時(shí)最小壓力,若沒(méi)有這個(gè)條件將很難保證獼猴桃果實(shí)采摘時(shí)的精度。
2.2 建立動(dòng)力學(xué)方程
為了確保抓取采摘的準(zhǔn)確性必須建立動(dòng)力學(xué)方程。
(1) 桿件4驅(qū)動(dòng)力的計(jì)算:
F4=Fsinα3cosα2,
(1)
式中:
F4——桿件4驅(qū)動(dòng)力,N;
F——絲杠電機(jī)提供的驅(qū)動(dòng)力,N;
α3——桿件5與水平方向的夾角,(°);
α2——桿件5與桿件4垂直方向的夾角,(°)。
(2) 桿件3驅(qū)動(dòng)力的計(jì)算:
(2)
式中:
F3——桿件3驅(qū)動(dòng)力,N;
l3——桿件3的長(zhǎng)度,m;
m3——桿件3的質(zhì)量,kg;
v3——桿件3的切向速度,m/s。
(3) 桿件2驅(qū)動(dòng)力的計(jì)算:
F2=F3cosα1,
(3)
式中:
F2——桿件2驅(qū)動(dòng)力,N;
α1——桿件3與水平方向的夾角,(°);
F3——桿件3驅(qū)動(dòng)力,N。
(4) 桿件1驅(qū)動(dòng)力的計(jì)算:
F1=F2cosα4,
(4)
式中:
F1——桿件1驅(qū)動(dòng)力,N;
α4——桿件2與桿件1垂直方向的夾角,(°);
F2——桿件2驅(qū)動(dòng)力,N。
(5) 機(jī)械手指指尖驅(qū)動(dòng)力的計(jì)算:
(5)
式中:
F0——機(jī)械手指指尖驅(qū)動(dòng)力,N;
v0——機(jī)械手指的指尖速度,m/s;
m0——機(jī)械手指部分的質(zhì)量,kg;
l0——機(jī)械手指指尖到旋轉(zhuǎn)軌跡中心的距離,m。
利用Auto CAD繪制出獼猴桃采摘機(jī)械手末端執(zhí)行機(jī)構(gòu)簡(jiǎn)化圖,見(jiàn)圖4。
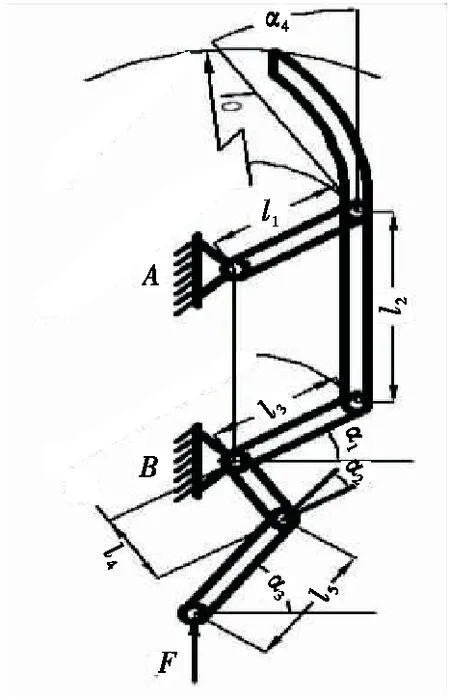
圖4 獼猴桃采摘機(jī)械手末端執(zhí)行機(jī)構(gòu)簡(jiǎn)化圖Figure 4 Simplified diagram of the terminal actuator of kiwi fruit picking manipulator
2.3 運(yùn)動(dòng)軌跡的分析
利用Creo 3.0繪制出采摘機(jī)械手末端執(zhí)行機(jī)構(gòu),并利用Creo 3.0對(duì)所繪制的三維圖形進(jìn)行運(yùn)動(dòng)軌跡的分析,得到手指指尖的運(yùn)動(dòng)軌跡,見(jiàn)圖5。
由指尖的運(yùn)動(dòng)軌跡計(jì)算可得末端執(zhí)行機(jī)構(gòu)抓取手指的可抓取范圍為45.2~73.3 mm,滿足獼猴桃果實(shí)規(guī)格大小的范圍。
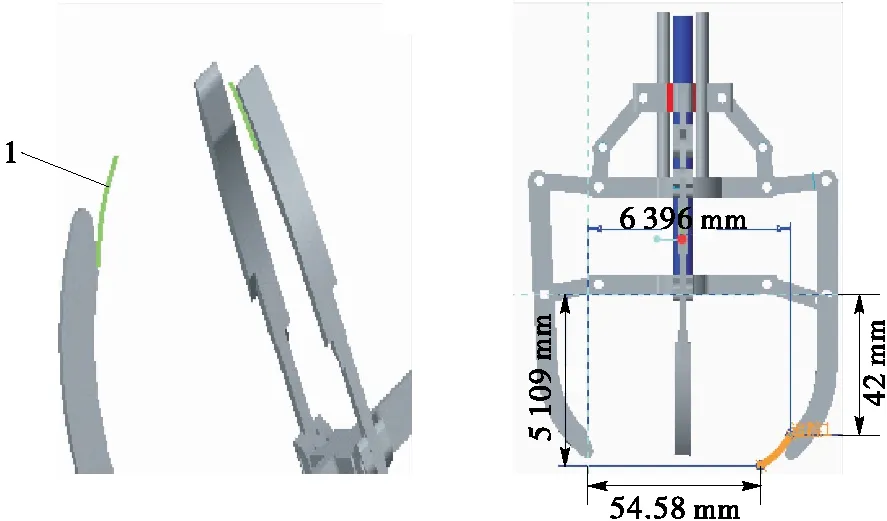
1. 指尖運(yùn)動(dòng)軌跡圖5 指尖的運(yùn)動(dòng)軌跡Figure 5 The trajectory of the fingertips
初定手指的運(yùn)動(dòng)速度為10 mm/s,得到位移和速度的圖像,見(jiàn)圖6。
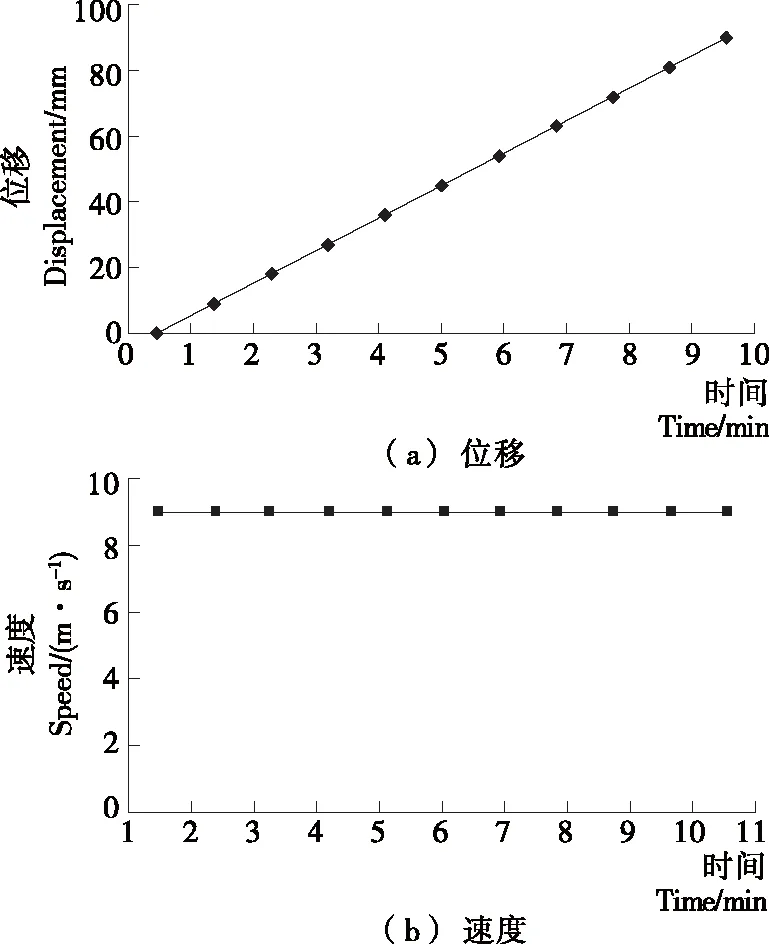
圖6 指尖位移和速度Figure 6 Fingertip displacement and speed
3 獼猴桃采摘機(jī)械手末端執(zhí)行機(jī)構(gòu)末端執(zhí)行機(jī)械的受力分析
普通獼猴桃的單果質(zhì)量在80~100 g,手指的加載力為7 N,對(duì)果實(shí)進(jìn)行抓取受力模擬仿真分析,結(jié)果見(jiàn)圖7。
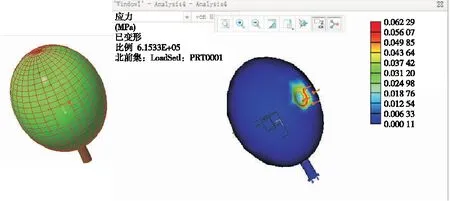
圖7 獼猴桃受力仿真分析Figure 7 Simulation analysis on the force of kiwi fruit
獼猴桃果實(shí)表面所受到的最大壓力小于不受損時(shí)的壓力12.53 kPa,四指抓取滿足無(wú)損采摘的要求。
4 結(jié)論
本研究設(shè)計(jì)的一種針對(duì)獼猴桃采摘的末端執(zhí)行機(jī)構(gòu)采用四指抓取減少了夾取過(guò)程中果實(shí)側(cè)漏、滑落的情況,通過(guò)在機(jī)械手指的內(nèi)表面貼附壓力傳感器,減少了果實(shí)在采摘過(guò)程中的磨損。對(duì)機(jī)械結(jié)構(gòu)的簡(jiǎn)化,降低了控制模塊的復(fù)雜性,使制作成本也大幅度降低。采用旋轉(zhuǎn)加拉扯共同作用,旋轉(zhuǎn)使得果柄與果實(shí)的連接處出現(xiàn)扭轉(zhuǎn)變形而松動(dòng),加之向下拉扯力的作用使果柄與果實(shí)分離,從而有效地實(shí)現(xiàn)了獼猴桃采摘的徹底性,也為其他水果的機(jī)械采摘提供了參考依據(jù)。本設(shè)計(jì)仍存在一些不足之處,由于獼猴桃為藤蔓植物,在設(shè)計(jì)時(shí)沒(méi)有考慮到果實(shí)在采摘時(shí)的柔性變形,如果從農(nóng)藝方面入手,改變枝條在棚架上的狀態(tài),可以很好地解決這個(gè)問(wèn)題。
[1] 張俊雄, 何芬. 設(shè)施農(nóng)業(yè)采摘機(jī)器人研究進(jìn)展[J]. 當(dāng)代農(nóng)機(jī), 2016(1): 22-24.
[2] 高號(hào), 王虎, 陳軍. 獼猴桃采摘機(jī)器人的研究與設(shè)計(jì)[J]. 農(nóng)機(jī)化研究, 2013(2): 73-76.
[3] 胡志勇, 張學(xué)煒, 張偉, 等. 西瓜采摘末端執(zhí)行器夾持力精確控制[J]. 農(nóng)業(yè)工程學(xué)報(bào), 2014, 30(17): 43-49.
[4] 張?jiān)瀑t. 獼猴桃T形小棚架栽培技術(shù)[J]. 農(nóng)技服務(wù), 2016, 33(2): 205, 216.
[5] 陳軍, 王虎, 蔣浩然, 等. 獼猴桃采摘機(jī)器人末端執(zhí)行器設(shè)計(jì)[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2012, 43(10): 151-154, 199.
[6] 劉繼展, 李萍萍, 李智. 番茄采摘機(jī)器人末端執(zhí)行器的硬件設(shè)計(jì)[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2008, 39(3): 109-112.
[7] 凌行方. 一種果品采摘機(jī)械手: 中國(guó), 201220531540.9[P]. 2013-04-10.
[8] 傅隆生, 張發(fā)年, 槐島芳德, 等. 獼猴桃采摘機(jī)器人末端執(zhí)行器設(shè)計(jì)與實(shí)驗(yàn)[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2015, 46(3): 1-8.
[9] 崔永杰, 蘇帥, 王霞霞, 等. 基于機(jī)器視覺(jué)的自然環(huán)境中獼猴桃識(shí)別與特征提取[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2013, 44(5): 247-252.
[10] 李楨, 王濱, 陳子嘯, 等. 基于MatLab的獼猴桃采摘機(jī)械臂運(yùn)動(dòng)學(xué)仿真研究[J]. 農(nóng)機(jī)化研究, 2015(12): 227-231.
[11] 蘇丹, 龍雄輝. 蔬菜采摘機(jī)器人通用夾持機(jī)構(gòu)設(shè)計(jì): 基于UG和ADMAS聯(lián)合仿真[J]. 農(nóng)機(jī)化研究, 2017(3): 155-159.
[12] 李建偉, 陳艷艷. 蘋(píng)果采摘機(jī)器人末端執(zhí)行器的原理及試驗(yàn)研究[J]. 農(nóng)機(jī)化研究, 2017(9): 139-142.
猜你喜歡
機(jī)械工程材料(2022年10期)2022-11-21 12:08:44
小學(xué)科學(xué)(學(xué)生版)(2021年9期)2021-11-02 05:26:46
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(bào)(2019年40期)2019-09-10 07:22:44
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫(huà)刊)(2017年12期)2018-01-10 16:07:29
筑路機(jī)械與施工機(jī)械化(2017年6期)2017-07-10 11:54:50
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
