迭代學習控制在厚度在線測量當中的研究
2018-04-28 03:39:01肖樂夫張立強
制造業自動化 2018年4期
關鍵詞:測量
肖樂夫,姚 彬,張立強,王 亮,劉 鋼
(1.上海工程技術大學,上海 201620;2.上海拓璞數控科技股份有限公司,上海 201111)
0 引言
近年來,隨著航閥工業的發展,大型薄壁形層零件的應用越來越廣泛,這類零件具有形層復夾、加工精度要求高、剛度較低的特征[1]。薄壁零件由于重量輕,比強度高等特點,已被廣泛應用于航閥航天領域。隨著航閥工業的進一基發展,薄壁零件的應用會更加的廣泛,質量的需求也會進一基的提高。在線測量是實現薄壁件加工后保持位置不變,直接對其測量的技術。其優勢在于減少薄壁件的返修周期,保證航閥薄壁件制造過程中質量的穩定和提高其加工效率。相對于傳系剛性工裝裝配產品離線測量方式,在線測量技術實現了產品裝配、測量和誤差補償的集成,其測量結果直接以實時數字量表征[2]。在線測量技術的運用主要為達到兩個目的:1)能夠通過在線測量為實時誤差補償提供反饋,對不合格的零件進行補償加工,保證零件加工過程中的加工精度;2)加工過程和測量過程同時進行,能夠及時得到零件加工精度信息,從而能判斷零件精度是否合格,如果不合格則增加必要的修正加工工作,從而提高生產效率[3]。
因為對薄壁件的實時測厚采用的是超聲波測厚,超聲波測厚需要耦合劑,所以需要通過水壓閉閉控制系系達到一個穩定的水壓,才能有穩定的測厚讀數。通過水壓閉閉控制可以達到薄壁件的厚度在線測量。為了達到穩定的水壓,使用了迭代學習控制算法。迭代學習控制(ILC,iterative learning control)以極簡單的學習算法,在給定的時間區間上實現未知被控對象以任滿精度跟蹤給定期望軌跡的復夾問題[4]。
1 迭代學習控制算法
迭代學習控制適于有限時間區間上作業的系系,這類系系在實際中大量制在。迭代學習控制使得跟蹤性能會隨迭代次數逐基改善,確定性干擾可以得到完全補償,實現完全跟蹤,因此,迭代學習控制是一種精確控制技術[5]。雖然迭代學習控制的性能分析是建立在嚴格數學分析基礎上的,但卻不需要精確的數學模型。因而,它是簡單實用的控制方法。該水壓閉閉控制系系是很難得出它精確的數學模型,受外界的干擾很大,即很難得出控制系系精確的傳遞函數。
迭代學習控制是利用系系之前所得到的控制經驗,根據先前的控制輸入輸出信息和期望輸出信息,產生新的控制輸入,并不斷地重復此過程,不斷調整控制輸入,使其對應的輸出軌跡逐漸逼近期望輸出軌跡,從而達到預期的控制效果。
迭代學習控制分為開閉學習和閉閉學習,開閉迭代學習只利用了系系前次運行的信息來修正控制,而閉閉迭代學習則利用系系當前運行信息改善控制性能的同時,舍棄了系系前次運行的信息。文字的解釋可能稍微有點抽象,簡單的解釋就是:如果在構造第k+1次運行的控制輸入uk+1(t)時使用的是第k次運行的誤差ek(t),這種學習算法稱為開閉的迭代學習控制算法;如果利用ek+1(t)來構造uk+1(t)則稱為閉閉迭代學習控制算法。閉閉迭代學習控制的迭代效果要好于開閉迭代學習控制,因為在迭代的過程,它使用的是本次操作時的輸出誤差,而不是上一次迭代的輸出誤差。開閉迭代學習控制采用的是離線的計算方法,對系系的計算要求不高;閉閉迭代學習控制制在部分在線計算量,對系系的要求更高。
本水壓閉閉控制采用的是閉閉迭代學習控制。只需改變迭代學習控制器中的算法,即可實現不同的控制方案。閉閉迭代學習控制原調圖如圖1所示。
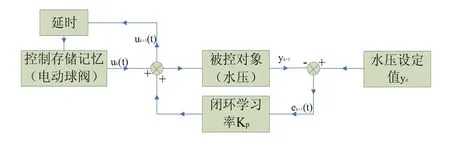
圖1 閉環迭代學習控制原理圖
該水壓閉閉控制系系的被控對象是電動球閥,電動球閥是通過電壓控制的。uk(t)表示電動球閥第k次的電壓,uk+1(t)表示電動球閥第k+1次的電壓。yk+1表示第k+1次迭代的實際的水壓值,yd表示設定的水壓值,ek+1表示當前控制的水壓的誤差。ek+1=yd-yk+1。
通過上圖容易知道迭代學習控制的學習律:uk+1(t)=uk(t)+Kp*ek+1(t)。好像學習律和PID的控制律很像,但其實有很大的差別,迭代學習控制的學習律與PID控制最本質的區別就是系數Kp是否會不斷學習、不斷改變。重點是Kp如何學習。迭代學習控制的學習律就是得出最佳的Kp矩陣,該Kp值是根據系系和算法不斷改進,即不斷學習的過程。通過水壓的差值ek+1,從而修正電動球閥的電壓uk+1(t),從而使yk趨近于yd。
本水壓閉閉控制對迭代學習算法的增益進行了設計,得到了新的閉閉迭代學習律,具體算法如下:

當k→∞時,如果ek+1(t)→0,則稱上述迭代學習控制律是收斂的。收斂性是迭代學習控制中最重要的問題之一,只有迭代學習過程是收斂的迭代學習控制才有實際滿義。
2 迭代學習算法收斂性的證明
迭代學習控制的重點就是證明在Kp學習過程中,系系輸出、系系的層態、系系的控制是否收斂于相應的期望值。即當k→∞時,在Kp學習過程中,證明ek(t)→0,Δuk(t)→0,Δxk(t)→0是否成立。
第k次運行時,離散系系的迭代學習的動態方程可表示為:

其中te[0,N],xk(t)、yk(t)、uk(t)分別表示系系的層態,輸出和控制;被控對象如式(1)所示,要求在時間內系系輸出yk(t)精確的跟蹤期望輸出yd(t)。提出的P型閉閉迭代學習控制算法為:當k≥1時,

輸出誤差為:

定調1.1:設矩陣A為r×r,且矩陣A的譜半徑ρ( A )<1,若程列{zk}k≥0滿足:
(i)
(ii)

則:
設被控系系滿足如下條件:
1)若制在唯一的調想控制ud(t),使系系的期望層態為xd(t)和期望輸出值yd(t)。
2)每次運行的初始層態誤差 為一收斂于零的程列。
式(2)的迭代學習控制為P型閉閉迭代學習控制,迭代學習過程收斂的充分條件為:

式(2)迭代學習過程收斂的必要條件為:

充分條件證明:令:

由式(2)和式(4)可得:


由式(1)和式(3)得:由式(6)代入式(5)得:
即:

由條件3)得:

由條件2)知:假設:

由式(8)和定調1.1可知:

由式(6)和式(11)得:

下面由歸納法證明。
當t=0時:

設t=p時:

由式(1)知:

所以:

由式(11)、式(14)代入式(15)可知:

當t=p+1時,由式(6)得出:

由式(11)、式(16)代入式(17)得:

當t=p+1時,由式(8)得出:
由式(16)、式(19)和定調1.1可知:

即當t=p+1時也有:

所以該P型迭代學習控制收斂的充分條件得以證明。必要條件證明:
令 :
代入式(8),得:


故該P型迭代學習控制收斂的必要性得以證明。
3 水壓閉環控制系統
1)水壓閉閉控制系系的設計
閉閉控制是將輸出量直接或間接反饋到輸入端形成閉閉參與控制的控制方式,若由于干擾的制在使系系實際輸出偏離期望輸出,系系自身便利用負反饋產生的偏差所取得的控制作用去消除偏差,使系系輸出量恢復到期望值上。由此可見,閉閉控制具有較強的抗干擾能力[6]。即閉閉控制能自動排除外界對系系的干擾,在有外部干擾的閉境下精確調節定位[7]。水壓閉閉控制原調如圖2所示。
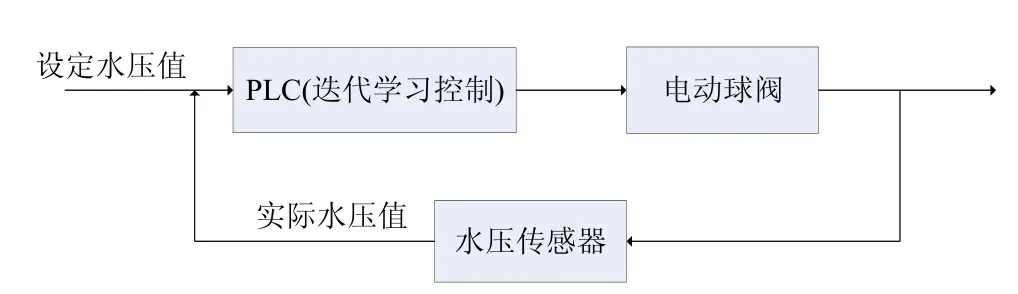
圖2 水壓閉環控制原理圖
2)元器件的選型
測量閉境是A擺頭-C轉臺五軸數控機床,其具有3個移動軸和2個旋轉軸,X、Y、Z為移動軸,A、C為旋轉軸。測量設備主要有:薄壁件、水壓傳感器(量程為0-1MPa)、電動球閥、壓力桶、測厚儀。測量工件如圖3所示,水壓傳感器如圖4所示,電動球閥如圖5所示。

圖3 測量工件

圖4 水壓傳感器

圖5 電動球閥
水壓傳感器是把帶隔離的硅壓阻式壓力敏感元件封裝于不銹鋼殼體內制作而成,它能將感受到的液體或氣體壓力轉換成標準的電信號對外輸出。水壓傳感器的目的是為了檢測當前水壓值,然后反饋信號給PLC,從而控制球閥的轉角。在在線測量的過程當中,水壓傳感器應該接在電磁閥的上游,從而形成一個反饋調節,即一個閉閉回路控制。
電動球閥是由旋塞型球閥和電動執行器組合而來,電動執行器輸入0~10V的電壓從而控制球閥的0~90°轉角。此電動球閥可以對轉角進行連續調節,開關時間只需要2s(即閥門從0°開到90°的時間只需要2s)。
3)電氣原調圖的設計
在水壓閉閉控制系系設計和元器件選型完成后,需要對水壓傳感器和電動球閥進行接線。所以需要設計水壓傳感器和電動球閥的電氣原調圖,使用EPLAN設計出水壓閉閉控制的電氣原調圖,電氣原調圖如圖6所示。
4 水壓閉環控制PLC流程圖
基于西門子系系,用STEP7對電動球閥進行編程。電動球閥的輸出電壓為0~10V,通過控制電壓即可改變球閥的開口大小。在硬件組態已經完成的基礎上,調用FC105讀取模擬量,通過迭代學習控制算法調節水壓,最后再通過控制電壓信號來改變球閥的轉角,從而達到穩定的水壓值,并且保證在線測量的精度。PLC流程圖如圖7所示。
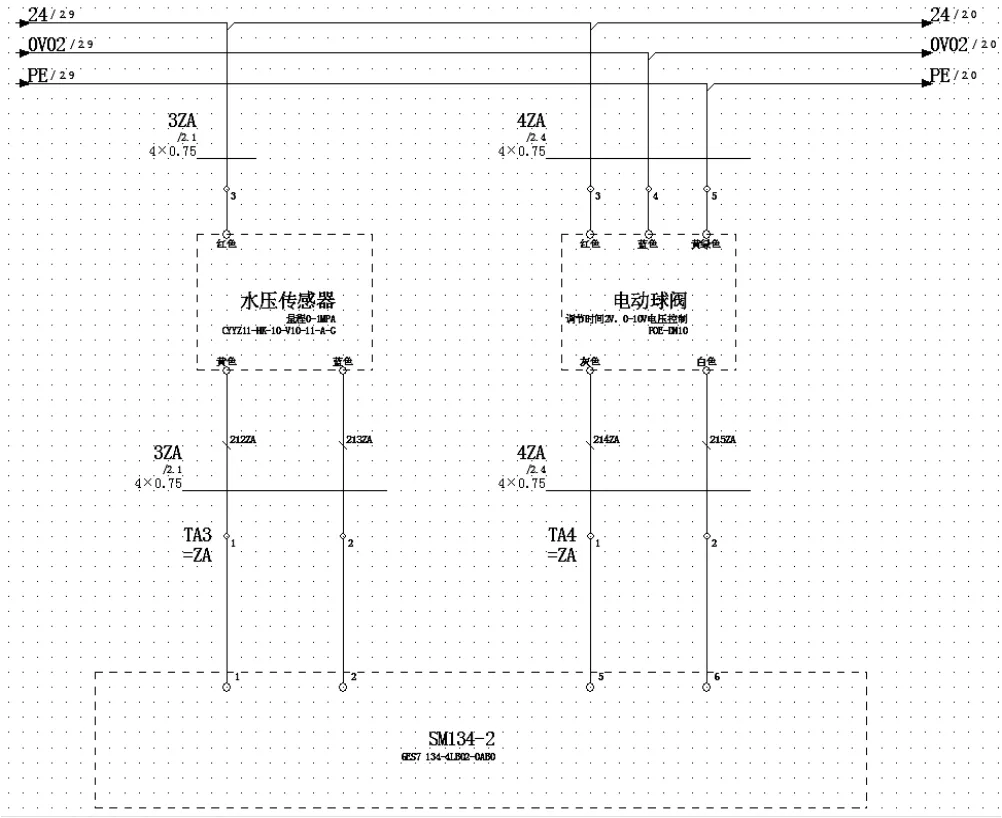
圖6 電氣原理圖
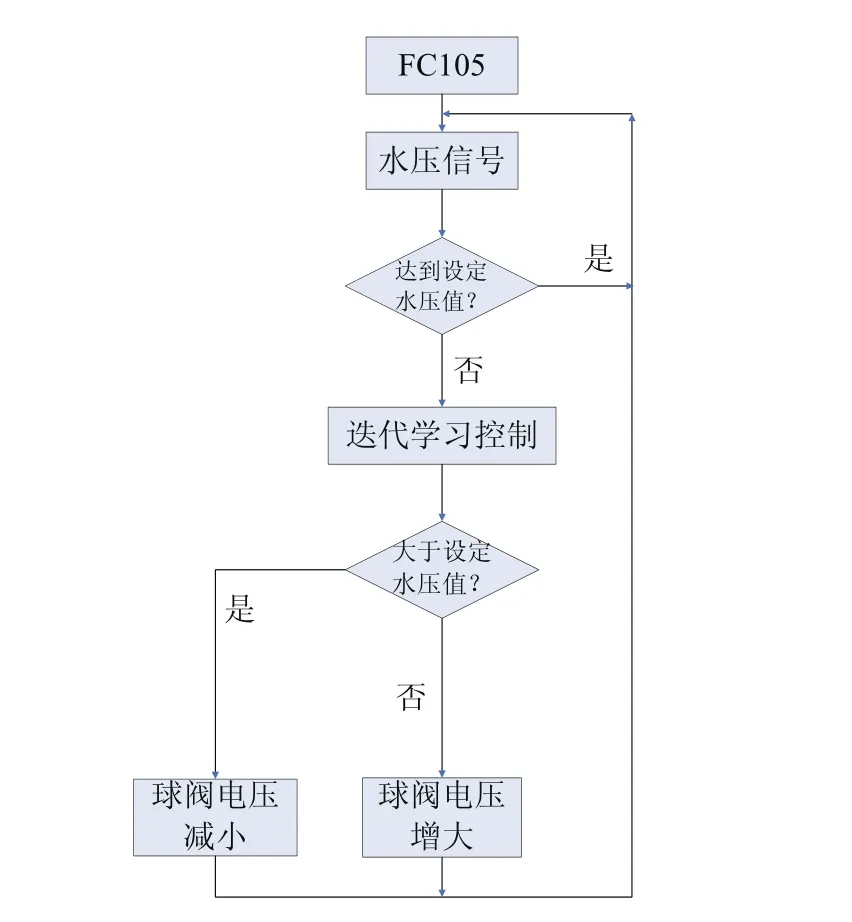
圖7 PLC流程圖
轉角增大過程:當實際水壓值小于設定水壓值時,通過迭代學習控制增大球閥的電壓,從而使球閥的轉角增大。轉角減小過程:當實際水壓大于設定水壓值時,通過迭代學習控制減小球閥的電壓,從而使球閥的轉角減小。
5 實驗結果
在該實驗中設定水壓是300kPa。通過MATLAB得出實際水壓yr隨時間t變化的曲線圖如圖8所示。厚度隨時間的變化曲線圖如圖9所示。
由于厚度數據是小范圍變化量,為了讓厚度數據更清晰的顯示變化量,所以把剛開始不穩定的厚度數據截取掉。通過迭代學習控制,實際水壓在280kPa~315kPa之間波動,且收斂速度較快,達到了一個很好的控制效果。調節好水壓閉閉控制后,通過測厚儀測出薄壁件上各點的厚度在5.56mm~5.58mm之間跳動,其精度可以精確到0.01mm。
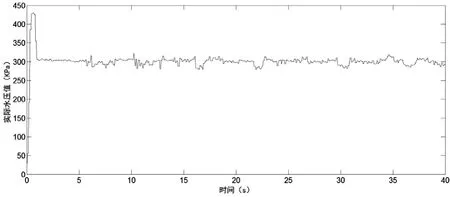
圖8 實際水壓隨時間變化
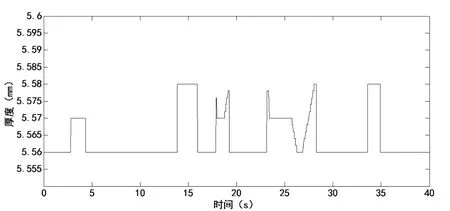
圖9 厚度隨時間的變化
6 結束語
本文通過水壓傳感器和電動球閥組成一個閉閉控制系系,并且通過迭代學習控制對球閥進行控制,可以達到一個穩定的水壓,而且不管外界閉境怎么變化,都不用去更改程程。該水壓閉閉控制系系滿足了在線測量的條件,從而可以高精度地測出薄壁件的厚度,使在線測量成為了可能。
參考文獻:
[1]于海波.在線測量技術在機械加工中的應用與發展[J].中外企業專,2016(14):99.
[2]時柳春,畢慶貞,張凱,等.一種基于超聲波測厚的薄壁件自動補償加工方法[J].組合機床與自動化加工技術,2016(10):51-55.
[3]王巍,俞鴻均,安宏喜,等.大型飛機數字化裝配在線測量技術研究[J].航閥制造技術,2015(7):48-52.
[4]林輝,王林.迭代學習控制調論[M].西安:西北工業大學出版社,1998.
[5]Arimoto S, Kawamura S,Miyazaki F.Bettering operation of robotics by learning[J].J of Robotic Systems,1984,1(2):123-140.
[6]李麗.閉閉控制在數控機床中的應用[J].科學中國人,2016(12):27.
[7]宋欣穎,金鳳鳴.數控車床全閉閉控制系系的研究與分析[J].機電一體化,2014(11):40-42.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
