基于車牌識別數據的機動車OD估計模型
2018-04-27 03:26:00李瑞敏陳熙怡張睿博
城市交通 2018年2期
李瑞敏,陳熙怡,張睿博
(1.清華大學交通研究所,北京100084;2.清華大學恒隆房地產研究中心,北京100084;3.廊坊市交通警察支隊,河北廊坊065000)
0 引言
實時、全樣本機動車OD信息對于交通規劃、交通管理等至關重要,但是其獲得卻一直非常困難。近幾年,隨著手機等數據采集技術的發展,可以嘗試從手機數據、浮動車數據中推估機動車OD信息,但是利用此類數據受到抽樣比例、折算比例等影響,只能獲得一部分機動車的OD,而難以獲得全樣本機動車OD信息,對于研究道路交通擁堵、實時交通管理貢獻有限。
自1980年文獻[1]使用路段交通量進行機動車OD矩陣反推(簡稱OD反推或OD估計)以來,OD估計得到較大發展。但是受現有的交通流檢測手段限制,眾多的動態OD估計研究往往利用路段交通量檢測數據進行估計,且估計范圍大多數針對單個道路交叉口、單條高速公路路段或者小型路網。
隨著交通量采集技術的不斷發展,OD估計中使用的基礎數據從單一檢測器獲取的路段流量信息逐漸擴充到多源數據[2-3],例如交叉口的轉向流量[4-6]、實測旅行時間[7-9]、部分已知OD信息[10-11]等。研究范圍從僅有一條路徑的情況[7,11-12]、假設的簡單路網[13-14]逐步拓展到真實的道路網絡[15],研究案例逐步接近現實情況,但研究實例仍存在過于理想化的情況。
在OD估計中,如果檢測器能夠將道路交叉口交通流的轉向進行區分,則同樣數量的檢測斷面可以獲得比路段斷面流量更多的已知量。例如文獻[16]實測三個連續交叉口一天的數據,建立了基于轉向流量比和旅行時間進行動態OD估計的方法。結果顯示,考慮轉向流量比的所有情況的準確性得到提高,但是考慮實測旅行時間在一些情況下效果反而下降。然而其所用實例路網較小,不存在路徑選擇的問題。其他一些研究[4,17]亦表明使用交叉口轉向流量進行OD估計能夠提高估計的精度。例如文獻[4]使用交叉口轉向流量(左、直、右)進行OD估計,其估計結果更優。但實例中的數據較少,理想的研究應該能夠獲得大量的轉向流量和路段流量。文獻[17]使用交叉口進口道各轉向流量進行OD估計能夠提高估計的精度,但是其使用仿真軟件計算分配矩陣,與現實情況存在一定的差距。
近年來日漸發展的自動車輛識別(Automatic Vehicle Identification,AVI)檢測數據為機動車OD估計提供了新的數據來源,通過車牌識別數據或GPS數據,可以獲取所覆蓋路段的轉向流量、旅行時間[18]及路網中實測的部分機動車OD信息等。例如文獻[19]提出使用AVI數據和流量數據進行全樣本OD的估計,通過AVI數據得到研究樣本的路徑選擇比例和OD矩陣。該文假設所有出行者具有相同的出行特征,將樣本數據乘以擴樣系數后得到全樣本估計。通過對比使用和不使用AVI進行OD估計的最終結果準確性發現,使用AVI數據進行全樣本估計能夠提高準確性。文獻[20]對AVI數據進行研究獲得轉彎比例,同時結合路段流量和歷史OD,使用非線性最小二乘模型進行OD估計。該文通過仿真對不同的市場滲透率、檢測率和AVI檢測器覆蓋率進行研究,結果表明隨著市場滲透率、檢測率和AVI檢測器覆蓋率的增加,RMSE在減小。但由于無法獲得真實的AVI數據,文中使用反推的OD作為真實OD進行仿真。在應用部分實測機動車OD信息方面,文獻[10]將AVI的車輛軌跡信息和路段流量作為基礎數據,使用貼現約束最小二乘模型、貝葉斯估計和卡爾曼濾波模型對路徑選擇比例進行估計,結果發現使用多源數據進行估計的準確性比僅使用路段流量要高。文中假設路徑選擇可以忽略,這與現實中的情況不相符。
本文使用中國城市中快速發展的在信號控制交叉口安裝的車牌識別檢測器得到的車輛通過信息(包括車牌、時刻、道路交叉口、車道等數據),將經過處理后得到的轉向流量和部分機動車OD信息作為基礎數據,建立進行全路網機動車OD估計的廣義最小二乘模型,結合實例應用S-Paramics進行仿真并對模型的效果進行評價分析。
1 OD估計模型
OD估計中的研究方法包括廣義最小二乘法(Generalized Least Squares,GLS)[11,15]、卡爾曼濾波模型(Kalman Filter,KF)[21-22]及其他一些模型(如決策模型[23])。本文選擇廣義最小二乘法作為基本方法建立OD估計的模型。
廣義最小二乘模型用于OD估計最早出現在1984年[13],根據最小二乘模型改進得到。通過最小化檢測路段交通量和分配路段交通量的偏差以及歷史OD矩陣和估計OD矩陣的偏差進行動態OD估計[11,14,23]。使用廣義最小二乘模型進行動態OD估計,其重點在于目標函數的確定以及分配矩陣的計算。
1.1 目標函數的確定
車牌識別系統能夠對每個車道的車輛分別檢測,因此在安裝有車牌識別檢測器的交叉口,可以得到每個進口道的各轉向流量,故本文在進行機動車OD估計的研究中除使用傳統的路段流量作為輸入外,為對比起見,還將使用車牌識別數據提供的各道路交叉口轉向流量作為輸入進行機動車OD估計。根據廣義最小二乘模型和本文進行機動車OD估計的特點,參考文獻[24]提出的目標函數,將其中路段流量的偏差變成轉向流量的偏差,即目標函數為最小化轉向流量檢測值和估計值偏差的平方和以及歷史OD值和OD估計值偏差的平方和,即

式中:Y為轉向流量檢測值,由檢測器直接檢測得到;?為轉向流量估計值,由OD估計過程中分配得到;X為歷史OD值,根據檢測到的部分OD矩陣推估得到,見下文分析;?為OD估計值,由OD估計得到。
由檢測到的部分機動車OD矩陣估計歷史OD矩陣的主要流程如下。記交通小區i到j檢測到的有準確ID(車牌)信息車輛的出行次數為實際總出行次數為小區i有ID信息車輛的檢測發生交通量為小區j有ID信息車輛的檢測吸引交通量為那么,有ID信息車輛的檢測發生交通量和檢測吸引交通量[19]分別為
式中:nOD為交通小區個數。
由于存在車輛漏檢和錯檢等情況,檢測設備無法檢測到全部車輛的完整軌跡信息,因此樣本數據的出行次數和實際總出行次數Tij之間的關系可以用滲透率(market penetration rates)[19]來描述,即
式中:Sij為滲透率。
全樣本OD估計算法需要確定擴樣系數,通過將部分機動車OD信息進行擴樣,得到全樣本OD。已有的全樣本OD估計研究大多數采用兩種不同的方法計算擴樣系數[19]:1)單一的全樣本OD估計系數,部分OD矩陣數據乘以單一擴樣系數后得到全樣本OD;2)多樣的全樣本OD估計系數,不同交通小區的部分OD數據按照各自的屬性特點乘以不同的擴樣系數得到全樣本OD。第一種方法考慮的因素簡單、計算方便,但是存在計算結果誤差較大的問題;而第二種擴樣系數的計算過程復雜、耗時較長,但是由于考慮的因素較為全面,能夠更好地獲得全樣本OD的估計。本文根據使用案例檢測數據的特點,將使用多樣的全樣本OD估計系數的計算方法得到擴樣系數。
1.2 分配矩陣的確定
在機動車OD估計中,分配矩陣的計算是其中的重要基礎。車牌識別數據不僅能夠提供經過交叉口檢測器的車輛的車牌、時間、所在交叉口編號和車道編號,而且經過數據整理篩選后能夠得到同一輛車的行駛軌跡數據,這些數據顯示了該車經過的交叉口以及在交叉口的轉彎方向,根據這些信息能夠得到車輛的OD信息。
由于目前安裝的車牌識別檢測器覆蓋率有限,且車牌識別的準確性達不到100%,故在實際中只能獲得一部分機動車真實的OD信息。已有研究表明,一部分真實的機動車OD信息對于進行機動車OD估計是一種非常有益的補充。
在本研究中,對一部分真實機動車OD信息的使用主要體現在利用真實的機動車OD信息進行分配矩陣的計算,本文假設檢測到真實OD信息的車輛在總體車輛中分布均勻,則檢測到真實OD信息的車輛的路徑選擇比例代表了全部車輛的路徑選擇比例,從而可以得到基于部分機動車OD信息的分配矩陣。
具體計算思路如下:通過獲得部分機動車OD對之間的OD流量,以及根據車牌識別數據獲得對應的OD流量所經過的路徑,以此為基礎進行基于部分機動車OD信息的分配矩陣計算。
根據公式(5)計算得到基于轉向流量和已知部分真實機動車OD信息的分配矩陣中所有元素,即
與基于路段流量的分配矩陣相比,該分配矩陣中各個元素的上角標含義發生了變化,表示為轉向流量的編號。
約束條件為

通過本文建立的模型,整合轉向流量及部分機動車OD信息,可以對整個路網的全部機動車OD信息進行估計。
在實際應用中,由于檢測器的缺失(即沒有在所有交叉口全部布設檢測器)、檢測準確率等問題,造成利用原始的檢測數據進行機動車OD計算中存在道路交叉口缺失、部分路徑缺失的問題,需要應用相應的方法進行彌補,在此不再詳述。
2 實際案例研究
2.1 案例研究方法
目前所有的交通流采集技術都無法獲得絕對完整準確的城市中全部機動車出行的真實OD,本文基于所能夠獲得的實測數據的類型和特點,對比分析了三種情形:1)基于轉向流量(395個)的OD估計;2)基于檢測的全部路段流量(199個)的OD估計;3)基于各轉向全部檢測的路段流量(77個)的OD估計。三種情形的分配矩陣都使用基于部分機動車OD信息所得到的分配矩陣。
步驟1:使用實測的部分機動車OD信息進行路網全樣機動車OD估計,將全樣機動車OD估計的結果作為本文OD估計的歷史OD矩陣X。
步驟2:使用實測的部分機動車OD信息計算分配矩陣B。
步驟3.1:將實測的395個轉向流量作為模型輸入,使用廣義最小二乘模型進行OD估計,得到基于轉向流量的OD估計結果。
步驟3.2:將實測的199個路段流量作為輸入,使用廣義最小二乘模型進行OD估計,得到基于路段流量的OD估計結果。
步驟3.3:篩選出包含全部轉向流量(即左、直、右轉向流量)的77個路段,得到其路段流量。使用廣義最小二乘模型進行OD估計,得到基于77個路段流量的OD估計結果。
步驟4:根據實際情況在S-Paramics仿真平臺建立路網模型,將步驟3得到的三個不同OD估計結果輸入到仿真平臺中,得到不同輸入下的仿真路段流量。
步驟5:計算包含各轉向(即左、直、右轉向流量)全部檢測的路段流量(77個)的MAPE和RMSE。
MAPE和RMSE計算公式分別為
式中:xi為真實檢測到的路段流量值;為基于仿真平臺估計得到的路段流量值;n為個數。
為了驗證使用部分機動車OD信息得到的分配矩陣在改善OD估計中的效果,本文將其與未使用部分機動車OD信息得到的分配矩陣的結果進行對比。
2.2 應用案例
本文將對廊坊市主城區某日全天的車牌識別數據進行處理和研究。根據路網的檢測器安裝情況,本文對路網中安裝檢測器的67個交叉口進行編號,將每個交叉口中有檢測器的進口道作為小區,共劃分了227個路段小區,25 233個OD對。使用S-Paramics仿真平臺按照實際路網(車道數和交叉口車道劃分等)建立路網模型,將全樣本OD的分布矩陣作為OD需求輸入到軟件中,使用原始數據整理出每個小時的出行量占總量的比例,輸入到S-Paramics中,讓車輛按照現實情況的比例輸出到路網上。仿真后可得到路段流量的仿真數據。通過對原始數據的整理,路網中總共有953個轉向流量,其中能檢測到的為395個;路網中總共有390個路段流量,其中199個路段上安裝有檢測器,在安裝有檢測器的199個路段中,77個路段包含全部轉向流量,即左、直、右三個轉向,101個路段包含兩個轉向流量(往往是只有左轉和直行流量),21個路段只包含一個轉向流量。
同時為對比路段檢測率的影響,本文對大小兩個路網進行對比分析,大路網如圖1所示,小路網則為圖1右上角虛線框所覆蓋范圍,包括6個交叉口。圖1中三角形為四個進口道均能檢測到左、直、右轉向流量的交叉口,圓形為檢測轉向流量不全的交叉口。
2.3 結果分析
由于不是每個路段都能夠檢測到左、直、右三個轉向流量,所以在驗證時,選擇包含三個轉向流量的路段進行對比分析,計算這些轉向流量的實測值與估計值之間的MAPE和RMSE。經過篩選,共有77個路段包含三個轉向流量。三種不同情形的結果如表1所示,可以得到以下結論:
1)使用上述三種方法所得到的OD估計的精度,以MAPE來衡量,都處于合理范圍內[25]。
2)使用轉向流量估計OD的評價指標略優于利用路段流量估計的評價指標,但是兩者非常接近。
3)在已知量和未知量的數量方面,檢測到的轉向流量為395個、路段流量為199個、OD對數量為25 233個,已知量(轉向流量和路段流量)與未知量(OD對)的數目比值分別為0.015 7和0.007 9。已知量的數量遠遠小于未知量,使得不同輸入下估計結果相差不大。
4)在三種情況下,通過使用由檢測到的部分已知的機動車OD信息得到的分配矩陣進行OD估計,MAPE和RMSE顯示其效果有相應的提升。
為提高未知量與已知量的比值,研究不同檢測流量數據量對OD估計結果的影響,使用圖1虛線框所覆蓋的范圍。該小型路網包含6個交叉口,其中4個交叉口設置有檢測器,共有260個OD對。此小路網中共有48個轉向流量,其中能檢測到36個轉向流量;路段流量21個,其中16個路段可以檢測到全部或部分流量;10個路段包含三個方向的轉向流量。即三種輸入數據的情況下,已知量和未知量的比例為13.8%,6.2%,3.8%。
對比表1和表2可知,已知量與未知量數量比值增加后,估計的準確度和穩定性得到提升。在小路網的案例中,OD估計能夠得到明顯較優的結果。同樣可以看到,利用已知的部分機動車OD信息得到的分配矩陣的應用也可以在很大程度上提高估計的精度。
3 結語
本文利用轉向流量和部分OD信息,使用廣義最小二乘模型進行OD估計,同時利用路段流量和部分OD信息估計得到的OD進行對比分析。結果顯示,使用轉向流量和部分OD信息進行OD估計的準確性得到提高。本文建立的方法適用于所有規模的城市路網,但是對于大型路網而言,在檢測器密度不足的情況下,由于已知量的數目遠遠小于未知量的數目,所以不同輸入所得結果的評價指標相差不大,即大型路網當已知量的數目較少時,OD估計的精度不高。但是通過大小路網的對比來看,相對于所需估計的OD對數量,增加已知量的比例能夠提高OD估計的精度。
由原始的檢測數據推估真實的部分機動車OD矩陣受到檢測精度等方面的限制,其準確性有所欠缺,但是對車輛行駛軌跡的檢測為獲取機動車OD信息提供了一種新的途徑。當前各個城市正在大規模建設相應的檢測系統,利用本文的方法,基于海量的檢測數據進行OD估計,可以為傳統的交通規劃需求分析提供重要的補充,亦是交通大數據在交通規劃領域的應用情景之一。
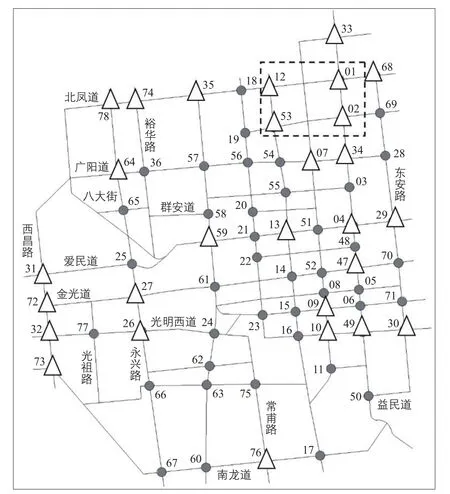
圖1 實際路網示意Fig.1 Roadway network

表1 大路網三種情況的MAPE和RMSE對比Tab.1 Comparison on MAPE and RMSE of 3 scenarios in a large roadway network

表2 小路網三種情況的MAPE和RMSE對比Tab.2 Comparison on MAPE and RMSE of 3 scenarios in a small roadway network
參考文獻:
[1]Zuylen H J V,Willumsen L G.The Most Likely Trip Matrix Estimated from Traffic Counts[J].Transportation Research Part B:Methodological,1980,14(3):281-293.
[2]Iqbal Md Shahadat,Choudhury Charisma F,Wang Pu,et al.Development of Origin-Destination Matrices Using Mobile Phone Call Data[J].Transportation Research Part C:Emerging Technologies,2014,40:63-74.
[3]Barcelo J,Montero L,Bullejos M,et al.AKalman Filter Approach for Exploiting Bluetooth Traffic Data when Estimating Time-Dependent OD Matrices[J].Journal of Intelligent Transportation Systems,2013,17(S2):123-141.
[4]Alibabai H,Mahmassani H S.Dynamic Origin-Destination Demand Estimation Using Turning Movement Counts[J].Transportation Research Record,2008(2085):39-48.
[5]何兆成,余志.城市道路網絡動態OD估計模型[J].交通運輸工程學報,2005(2):94-98.He Zhaocheng,Yu Zhi.Dynamic OD Estimation Model of Urban Network[J].Journal of Traffic and Transportation Engineering,2005(2):94-98.
[6]蔣云.基于路段轉向流量的OD估計算法研究[D].合肥:中國科學技術大學,2015.Jiang Yun.Study of OD Estimation Based on Turning Traffic Flow[D].Hefei:University of Science and Technology of China,2015.
[7]林勇,蔡遠利,黃永宣.基于廣義最小二乘模型的動態交通OD矩陣估計[J].系統工程理論與實踐,2004(1):136-140+144.Lin Yong,Cai Yuanli,Huang Yongxuan.GLS ModelBased DynamicOrigin-Destination Matrix Estimation for Traffic Systems[J].Systems Engineering-Theory&Practice,2004(1):136-140+144.
[8]Lin P W,Chang G L.A Generalized Model and Solution Algorithm for Estimation of the Dynamic Freeway Origin-Destination Matrix[J].Transportation Research Part B-Methodological,2007,41(5):554-572.
[9]Hu S,Chen C.Dynamic Estimation of Freeway Origin-Destination Demand and Travel Time Using Extended[M].Kalman Filtering Algorithm,2004.
[10]Zijpp N V D.Dynamic OD-Matrix Estimation from Traffic Counts and Automated Vehicle Identification Data[J].Transportation Research Record,1997,1607:1-18.
[11]楊小寶,王新偉,張寧.基于ATIS下的OD矩陣估計[J].公路交通科技,2007(9):100-103+108.Yang Xiaobao,Wang Xinwei,Zhang Ning.Estimation of OD Matrix Based on Information from ATIS[J].Journal of Highway and Transportation Research and Development,2007(9):100-103+108.
[12]Asakura Y,Hato E,Kashiwadani M.Origin-Destination Matrices Estimation Model Using Automatic Vehicle Identification Data and Its Application to the Han-Shin Expressway Network[J].Transportation,2000,27(4):419-438.
[13]Cascetta E.Estimation of Trip Matrices from Traffic Counts and Survey Data:A Generalized Least-Squares Estimator[J].Transportation Research Part B-Methodological,1984,18(4/5):289-299.
[14]Tan Guozhen,Liu Lidong,Wang Fan,et al.Dynamic OD Estimation Using Automatic Vehicle Location Information[C]//Information Technology and Artificial Intelligence Conference,Chongqing,Augest 7-11,2011.
[15]李樹彬.城市交通系統運行狀態評估及控制策略研究[D].北京:北京交通大學,2012.Li Shubin.Research on the Run State Evaluation of Urban Transportation System and Control Strategies[D].Beijing:Beijing Jiaotong University,2012.
[16]Mishalani R G,Coifman B,Gopalakrishna D.Evaluating Real Time Origin Destination Flow Estimation Using Remote Sensing-Based Surveillance Data[C]//The 7th International Conference on the Applications of Advanced Technology in Transportation,Cambridge,August 5-7,2002.
[17]刁陽.城市路網動態OD矩陣估計仿真方法研究[D].上海:上海交通大學,2011.Diao Yang.Research on Dynamic Origin-Destination Matrix Estimation of Urban Network Using Simulation Method[D].Shanghai:Shanghai Jiao Tong University,2011.
[18]盧守峰,王杰,薛智規,等.基于二流體模型的交通分析及OD出行時間矩陣[J].公路交通科技,2015,32(11):132-137+142.Lu Shoufeng,Wang Jie,Xue Zhigui,et al.Analysis of Traffic Based on Two-Fluid Model and OD Travel Time Matrix[J].Journal of Highway and Transportation Research and Development,2015,32(11):132-137+142.
[19]Dixion M P,Rilett L R.Population Origin-Destination Estimation Using Automatic VehicleIdentification and Volume Data[J].Journal of Transportation Engineering,2005,131(2):75-82.
[20]Zhou X,Mahmassani H S.Dynamic Origin-Destination Demand Estimation Using Automatic Vehicle Identification Data[J].IEEE Transactions on Intelligent Transportation Systems,2006,7(1):105-114.
[21]Barcelo J,Montero L,Marques L,et al.A Kalman-Filter Approach for Dynamic OD Estimation in Corridors Based on Bluetooth and WifiData Collection[C]//The 12th World Conference on Transport Research,Lisbon,July 11-15,2010.
[22]Antoniou C,Ben-Akiva M,Koutsopoulos H N.Dynamic Traffic Demand Prediction Using Conventional and Emerging Data Sources[J].IEE Proceedings Intelligent Transport Systems,2006,153(1):97-104.
[23]彭建,徐猛,高自友.基于有序加權平均算子的公交線路OD矩陣估計[J].管理科學學報,2013,16(1):36-41+58.Peng Jian,Xu Meng,Gao Ziyou.Transit Route OD Estimation Based on Ordered Weighted Averaging Operator[J].Journal of Management Sciences in China,2013,16(1):36-41+58.
[24]Frederix R,Viti F,Himpe Willem W E,et al.Dynamic Origin-Destination Matrix Estimation on Large-Scale Congested Networks Using a Hierarchical Decomposition Scheme[J].Journal of Intelligent Transportation Systems,2014,18(1):51-56.
[25]Lewis C D.Industrial and Business Forecasting Methods[M].London:Butterworth-Heinemann,1982.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32