風浪流干擾下的無人艇航向模糊自適應模型的研究?
2018-04-27 03:33:41曾海虹李向軍丁麗娜馬占軍
艦船電子工程 2018年4期
關鍵詞:模型
曾海虹 李向軍 丁麗娜 馬占軍
(大連海洋大學信息工程學院 大連 116023)
1 引言
無人艇是一種能夠在復雜海洋環境下安全自主航行,并完成各種設定任務的海洋探索與監測工具。在軍事上,無人艇可以實現掃雷、情報監測和精確打擊等任務,對于國家海洋安全有著十分重要的作用[1]。在民用領域上,無人艇幫助人類實現海洋氣象監測、污染排放情況調查和航道自主跟蹤等,對海洋科學探索有重要的研究價值[2]。隨著21世紀通信、人工智能等技術的進步,無人艇迎來了高速發展期。美國的“斯巴達偵察兵”,以色列的“保護者”[3]“Inspector”以及新加坡的“Venus”在軍事領域有著突出的表現。美國的“Auto Cat”號[4]、“Kan-Chan”號無人艇,英國的“Springer”號無人艇[5]均在海洋監測上有著不同程度的研究。在中國,2008年國際奧運會上,“天象1號”無人艇擔當了奧帆賽期間的氣象預測監控保障服務工作[6];而幾年后研制的“精海”系列,配備北斗導航系統,實現實時自主定位、航道的自動跟蹤、航跡線路的遠程動態設定、障礙物的自主智能避碰等技術。由于我國對海洋安全和海洋資源開發的逐漸重視,無人艇研究將會逐步深入,可以預見在不久的將來中國無人艇會有更大的突破性進展。
無人艇模型從輸入變量數目上可分為三自由度、四自由度和六自由度模型。目前多采用固定坐標系和隨船運動坐標系結合的六自由度操縱性數學模型。對于船舶操縱性數學模型主要有兩種,一種是歐美研究居多的Abkowitz模型(整體型模型)和日本研究者提出的MMG模型(分離型模型)[7]。前者將船-槳-舵作為整體,這種模型是基于Nomo?to模型,而后者將船-槳-舵分開考慮,兩者被統稱為水動力模型[8]。確定水動力參數的方法有:數據庫調用或經驗公式法、約束模擬試驗法、理論分析和數值計算法以及自航模或試穿實驗加系統辨識的方法。近十年來,隨著人工智能技術的不斷發展,出現了很多新的方法和途徑,有應用遺傳算法結合約束模試驗和自航模試驗辨識的Abkowitz模型、應用神經網絡結合仿真試驗辨識的水下運載器、水面船舶運動操縱模型的MMG模型,還有支持向量機方法結合仿真試驗和自航模試驗辨識的Abkowitz模型[9]。
無人艇在風浪流干擾下的航向及航速控制問題是較為重要的難點,傳統的控制理論適用線性模型,而無人艇在風浪流環境下非線性和復雜性較為顯著。本文針對路徑規劃和軌跡跟蹤中航向角在風浪流干擾下的模型進行研究,運用Nomoto模型,采用模糊控制思想解決風浪流環境下的非線性問題。為解決風浪流環境下的復雜性問題,本文采用分類建模的方式。在前人提出的船舶模糊控制思想和對風浪流分類建模的基礎上,加入了Nomoto模型,將三者進行了結合,得到基于Nomoto模型的風浪流航向模糊自適應控制模型。在Matlab環境下設計出了適合本研究的模糊控制器,并使用Simulink進行仿真實驗。
2 無人艇運動控制模型
2.1 無人艇運動坐標
將無人艇的運動視為剛體運動,為了更準確的描述水面無人艇的運動狀態,分別取固定在船體直角的兩種坐標系,即慣性坐標系E-ξηζ(簡稱“定系”)和隨船運動坐標系G-xyz(簡稱“動系”),在這兩種坐標系下進行建模[10]。其中動系的坐標原點在無人艇的重心處,艇艏指向x軸的正向,右舷的方向為y軸的正向,艇體垂直指向海底的方向是z軸的方向。
2.2 無人艇的受力分析
通常無人艇在海面上航行時所受到的力大致可以分為:重力、浮力、噴水推進力[11]以及風浪流干擾力[12]等。無人艇所受到的重力是由于地球萬有引力的作用所產生的,浮力是由于水面無人艇的艇身所接觸到的水與空氣的靜壓力之合力及其合力矩而引發的。除兩者以外,屬于無人艇所受外力的影響。噴水推進力是利用水流的反作用力來實現艇體的前進與后退操控,還可通過對控制倒車斗轉角和噴嘴轉角的改變實現對艇體的操縱[13]。無人艇在海上航行,必然會受到海洋環境因素的影響,其中主要的環境干擾力就是風浪流的干擾。
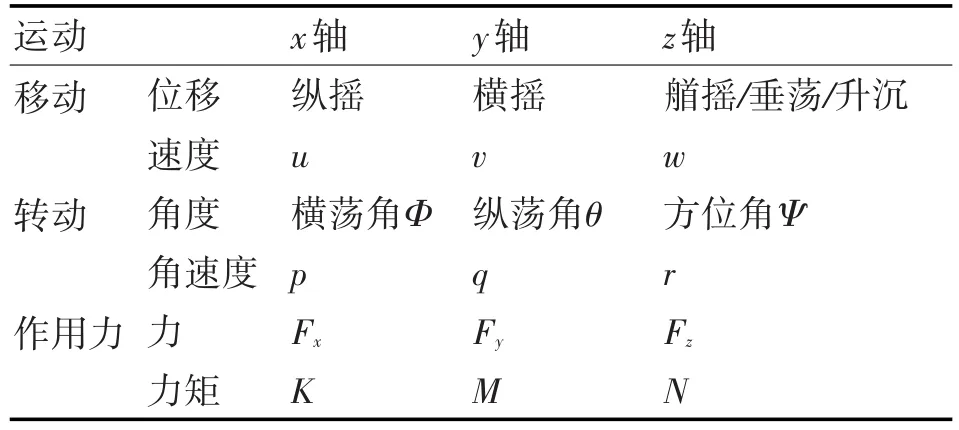
表1 無人艇受力與各運動的名稱符號
2.3 無人艇六自由度運動控制模型
利用質心運動定理結合相對質心運動的動量矩定理可推導出無人艇的六自由度運動操縱控制模型[7]。其在動坐標系上的投影為
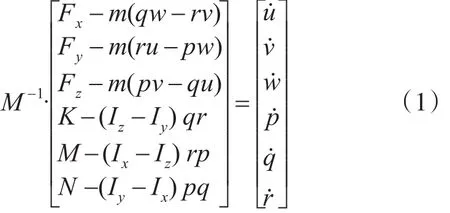
在上式中,M是無人艇的質量矩陣,Fx、Fy、Fz表示在x、y、z三個方向上的受力,K、M、N表示在x、y、z三個方向上的所受力矩,Ix、Iy、Iz為無人艇繞質心的慣性矩,為無人艇的加速度向量。 -m(qw-rv),-m(ru-pw),-m(pv-qu)是無人艇運動引起的慣性力,-(Iz-Iy)qr,-(Ix-Iz)rp,-(Iy-Ix)pq是無人艇陀螺效應引起的慣性力,簡稱回轉效應,將加速度向量與其受力情況進行一一對應,可以得到無人艇的運動模型的力學方程[10],它可寫成:
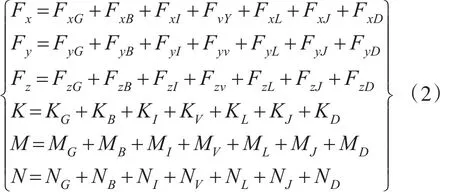
下標G表示艇體重力,B指浮力、I指慣性力、V指黏性力、L指動升力、J指噴水推進力、D指環境干擾力。
雖然這六個自由度之間具有耦合效應,但是因其影響作用比較小,在無人艇航向研究中可忽略,在此只考慮平面運動即可。此時可采用三階No?moto模型:

式中Ψ為航向角,T1,T2和T3表示模型的追隨性操縱系數,K表示旋回性操縱系數,δ指的是舵角。
在不考慮船速的情況下,對艇體受到的風浪流干擾下的自適應模型研究,實際上是對舵角或者是噴水推進氣的轉角的研究。

uK表示在舵角隨動系統的輸入信號,δK表示實際的舵角,T表示時間常數。利用式(3)和式(4),對舵角δ以及干擾變化角度ω關系進行分析,將會得到本研究的的風浪流干擾模型。
3 風浪流環境干擾分析
3.1 基本假設
為了更好地使用本文中的模型,在此將對模型使用條件作出以下幾點說明。假定本文研究的無人艇運動狀況是在下面的條件下進行的:
1)無人艇操縱運動是線性過程,在此要說明的是本研究是以舵角的變化量來控制無人艇使其航向保持不變;
2)無人艇所經歷的風浪流干擾處于可以調節的范圍內,沒有翻船等危險,更不存在極端惡劣的環境干擾條件;
3)假設運動軌跡周圍無障礙物,不會發生碰避等情況;
4)假設航速保持不變,暫時忽略風浪流對其速度的干擾;
5)把無人艇在水面的運動看成是平面運動。
3.2 風浪流干擾分類
在假設條件下,可以運用疊加原理用一個作用于舵角的擾動來替代無人艇各個部位所受到的擾動,設這個在舵角操縱系統下的擾動量為ω,于是對式(4)加入干擾條件后得到模型中舵角的表達式為

無人艇受到的環境干擾,即可用以下四種情況進行模擬實現[14]。
3.2.1 周期性風浪流干擾

其中最大干擾幅度相當于尾垂直舵打了一個8°舵角對無人艇所產生的力(矩)。
3.2.2 風浪流恒值干擾

此狀態下艇體會受到的是一個階躍干擾,它的干擾量為8°,自適應操舵系統可以運用反向舵角消除此恒值干擾。
3.2.3 風浪流正態分布隨機干擾

在此H1、H2是相互對立并且服從正態分布的偽隨機變量。

3.2.4 風浪波均勻分布綜合隨機干擾H3、H4是相互對立并且服從[ ]0,1 均勻分布的偽隨機變量。
在這四種風浪流干擾下,本文使用航向偏差以及航向偏差的導數作為模糊控制器的輸入對無人艇航向進行控制,目的是為了更加精確地選擇模型,獲得良好的適應性。
4 模糊控制器的設計
模糊控制的基本思想是在人類已有的經驗基礎上,將專家或熟練操作員的經驗用語言表達出來,編寫出一套完整的控制規則,再根據系統當前的運行情況,經過模糊推理、模糊判決等運算后,求解出控制量,實現對被控對象的控制。而自適應是指在控制過程中實時地根據檢測處理后得到數據的特征,并根據此特征自動調整控制方法、執行順序、處理參數、邊界條件或約束條件,使其與所處理的數據統計分布特征、結構特征相適應,以獲得最佳的處理效果。本文就是通過模糊控制,實現無人艇的航向自適應控制。控制器的設計思路是利用Kim等提出的多規則庫控制器,把對象參數的變化范圍根據設定幅度進行分割,不同的參數范圍與不同的規則庫之間相互對應,使用不同的控制參數,同時利用系統辨識觀測參數變化情況,在不同的規則庫之間進行切換[15]。
4.1 模糊控制的一般過程
圖1為模糊控制器的一般過程。通俗的說,模糊控制是以利用模糊數學的相關知識來模仿人的思維邏輯,對模糊現象進行辨識和判定,最終給出精確的控制量,實現對被控對象的控制。
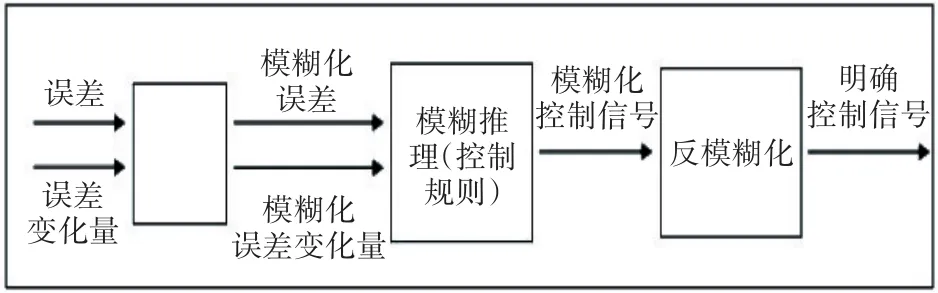
圖1 模糊控制的一般過程
在采樣時刻k,誤差和誤差的變定義為

在模糊控制中,模糊系統行為按專家的專業知識,以語言規則作為描述:可將多輸入多輸出(MIMO)轉化為多輸入單輸出(MISO)進行分類控制。一般規則表示如下

4.2 風浪流干擾下模糊控制模型的建立
選取二維模糊控制器,將航向偏差e和作為模糊控制器的輸入量,對舵角δ的變化進行控制,實現對航向的調節。以艇體指向艇艏的方向為基線角度逆時針方向為正。e的論域為而的論域為 [-0.5°/s,0.5°/s],舵角δ的論域為本 文 選 取 模 糊 語 言 變 量 集作為模糊規則制定的基礎,集合中的元素分別代表負大,負中,負小,零,正小,正中和正大。在隸屬函數選擇上常用的是三角型函數和高斯函數,本文中的航向偏差e和的語言值隸屬度函數都選用了高斯函數進行模糊化處理。因為高斯函數在近似逼近上準確度更高。下面是高斯函數的公式:

c代表MF的中心,σ決定MF的寬度
模糊推理規則選用了Matlab中的mamdani組合型規則,解模糊法采用面積均分法(重心法)。
公式如下:
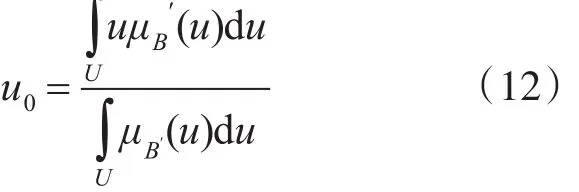
得到的模糊控制規則如下表2所示。
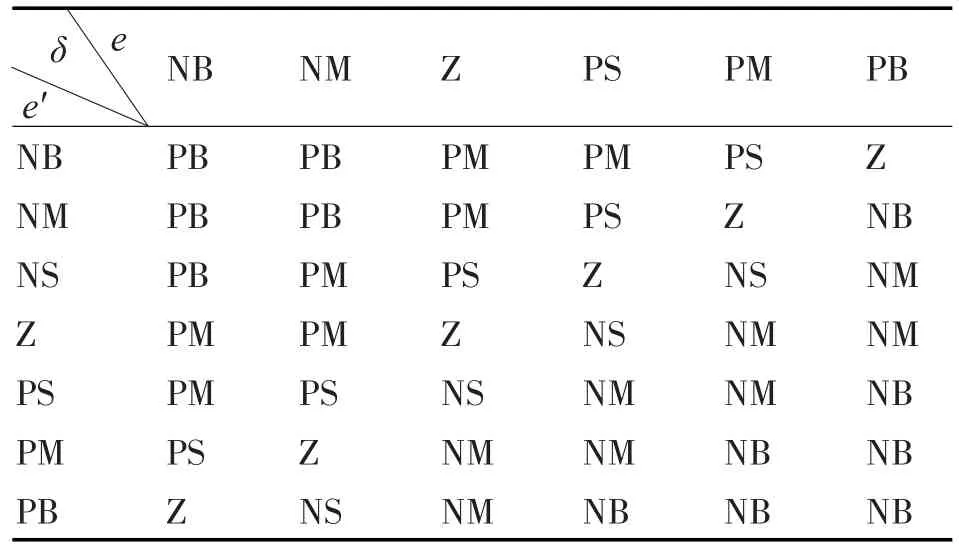
表2 航向模糊控制規則表
5 基于Nomoto模型的風浪流干擾下的航向模糊自適應模型
風浪流干擾下的航向模糊自適應模型的建立過程如下:
2)考慮到環境干擾的影響,設風浪波非線性干擾因素為ω,航角表達式可改寫為:δ=δK+ω。將ω分為四類,分別建立模型,劃分好自變量的范圍,讓舵角改變情況在這四種情況下來回切換即可。設關于δ和ω的風浪波干擾模型為B。
3)在上述研究的基礎上,設置一個模糊控制器。模糊控制器的參數變化遵循的是模糊控制規則,偏航角和偏航角的導數作為模糊器的輸入變量,使用這樣的模糊控制器可以更好地保證航行的準確性。在此,設所得到的關于e、和δ的模糊控制模型為C。
4)如果單從航向上考慮,將航速設為理想航速的情況下,實際上所得到的無人艇在風浪流干擾下的航行自適應模型是模糊控制模型、環境干擾模型與運動操縱模型的結合,即將C模型帶入B中,最后帶入到模型A中。
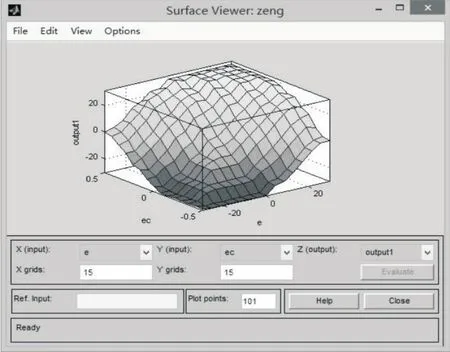
圖2 surface view界面
本論文的驗真仿真是在Matlab的環境下使用mamdani規則器實現的。用圖2所示的surface view菜單命令看模糊控制器的輸出結果。最后將設計好的模糊控制器鏈接到Simulink中,并與運動操縱模型A1相連接,將式(3)中的T1,T2,T3和K的值根據無人艇的實際參數進行帶入,調整模型的參數值,得到最終結果。
6 結語
本文首先建立了無人艇運動控制模型,然后對無人艇在風浪流環境下所受的干擾進行了分類建模,運用模糊控制思想設計了無人艇在風浪流干擾下的模糊控制器,借助Matlab建模工具,建立起基于Nomoto模型的風浪流干擾下的航向模糊自適應模型。本文使用的是模糊控制理論,與經典控制理論和現代控制理論相比,具有明顯的優勢,它不需要建立對象的精確數學模型,易于操作人員接受和使用,便于通過計算機軟件實現無人艇的自主航行,其魯棒性和適應性性能良好。
[1]萬接喜,外軍無人水面艇發展現狀與趨勢[J].國防科技,2014(5):91-96.
[2]PORATHE T,BURMEISTER HC,RODSETH J.Mari?time unmanned navigation through intelligence in net?works:The MUNIN project[C]//12th International Confer?ence on Computer and IT Applications in the Maritime In?dustries,COMPIT’13,Cortona 15-17 April 2013.2013:177-183.
[3]CAMBELL S,NAEEM W,IRWING W W.A review on im?proving the autonomy of unmanned surface vehicles through intelligent collision avoidance maneuvers[J].An?nual Reviews in Control,2012(02):267-283.
[4]廖煜雷,無人艇的非線性運動控制方法研究[D].哈爾濱:哈爾濱工程大學,2012.
[5]R Sutton,S Sharma&T Xao,Adaptive navigation sys?tems for an unmanned surface vehicle[J].Journal of Ma?rine Engineering&Technology,2011,10(3):3-20.
[6]操秀英,無人船怎么監測天氣[N].科技日報,2008-09-05(005).
[7]Junfeng Xiong, Decai Li, Yuqing He, et al.Active Quasi-LPV Modeling and Identification for a Water-Jet Propulsion USV:An Experimental Study[J].IFAC-Pa?persOnLine,2014,48(11):431-436.
[8]孫健,陳永冰,周崗等.兩種響應型船舶運動模型的對比及適用性分析[J]. 艦船科學技術,2016(11):14-19.
[9]吳恭興,無人艇操縱性與智能控制技術研究[D].哈爾濱:哈爾濱工程大學,2010:15-30.
[10]吳恭興,鄒勁,孫寒冰等.高速無人艇的運動建模及其視景仿真[J]. 大連海事大學學報,2010(02):10-12.
[11]王長濤,劉春光,韓忠華.噴水推進推力產生機理分析及仿真[J].噴水推進推力產生機理分析及仿真,2011(27):196-199.
[12]吉春正,風浪流環境中無人艇操縱性研究[D].哈爾濱:哈爾濱工程大學,2007:5-41.
[13]孔慶福,吳家明,曾凡明.船舶噴水推進系統數學建模及仿真研究[J]. 系統仿真學報,2005,17(12):2844-2848.
[14]周耀庭,鄧志良,蔣雯.船舶航向操縱參數自整定模糊控制仿真[J]. 計算機仿真,1996,13(3):15-21.
[15]劉國榮,多變量系統模糊/神經網絡自適應控制[M].北京:科學出版社,2012:2-3.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19