基于多視幾何理論的多旋翼無人機大比例尺測圖應用
2018-04-26 02:14:21尚海興黃文鈺柯生學馬衛昭
西北水電 2018年1期
尚海興,黃文鈺,柯生學,張 釗,馬衛昭
(中國電建集團西北勘測設計研究院有限公司,西安 710065)
0 前 言
無人機航測成圖已廣泛用于大比例尺地形圖測繪,但無人機航攝與大飛機航攝相比,獲取的影像畸變差大、影像重疊度不規則、像片旋偏角大等技術弊端嚴重影響了該技術在航空攝影測量領域的應用,尤其是精度要求較苛刻的大比例尺地形圖測繪工作[1-2],測圖高程精度不達標業已成為無人機航測領域的行業痛點。近年來,基于GPS輔助的空中三角測量技術,在無人機航攝平臺上加裝差分GPS定位設備,用于測定影像外方位元素的線元素,將其觀測值帶入加權光束法區域網平差的技術方案一定程度地改善了測高精度(很多情況下仍不達標),但其使用前提是飛行姿態應盡量平穩并且相機鏡頭需要嚴密的相機檢校,航攝初始條件要求高。該方案實施門檻較高,硬件成本高,空三精度不穩定。
計算機視覺領域的多視幾何(Multiple-view Geometry)[3]與數字攝影測量相似[4],但理論并不完全一致,2種理論均有其適用前提條件和技術優勢。多視幾何由于對航攝初始條件要求低,相機無需專業檢校,硬件要求低,如何將多視幾何理論的優勢用于克服攝影測量理論局限性,使之滿足測繪工程領域精度要求的研究很有必要。搭載非量測相機的多旋翼無人機靈活易操作,適合小面積地形圖大比例尺測繪,多視幾何理論成功用于單兵多旋翼無人機大比例尺地形圖測繪具有比較現實的應用價值,可為低成本高效地解決小面積地形圖測繪提供有力的技術方案。
1 多視幾何理論
1.1 多視幾何理論原理
多視幾何理論是由相機獲取的序列影像重構三維場景的三維空間結構和相機曝光瞬間的三維空間位置及方向。其基本思想是:
如圖1所示,設空間物點M(X,Y,Z),相機投影中心O到O′的空間位置矢量t,旋轉矩陣為R,2個投影位置相機內參數分別為K1和K2,M在左右片的像點分別為m和m′,設物點M到像點m的投影矩陣為P1,到m′的投影矩陣為P2,即:
m=P1M=K1[I,0]M
(1)
m′=P2M=K2[R,t]M
(2)
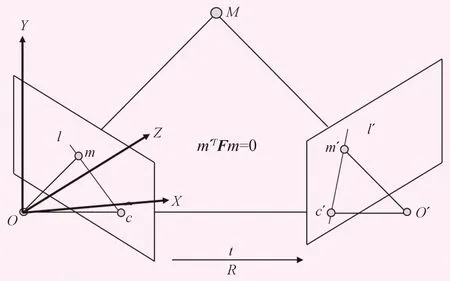
圖1 多視幾何的核線幾何關系圖
根據左右片間的核線幾何關系[5],可代數推導出左右像點的關系:
m′TFm=0
(3)
式中:F為基本矩陣,表達了左右片間的核線幾何關系,可直接由特征匹配像點坐標計算獲取。相機內參數已知時,本質矩陣可由基本矩陣F求得,本質矩陣E由相機的外參數確定,與相機內參數無關,可分解表示為:
(4)
所以,對本質矩陣E進行分解可得到投影矩陣P2,進而獲取P1后求得空間點M坐標。本質矩陣分解得到位置矢量t和表示相機方向的旋轉矩陣R。計算全程采用代數幾何的矩陣運算,未使用泰勒展開式進行線性化處理,物方點坐標M(X,Y,Z)、旋轉矩陣R及位置矢量t三個未知數均為任意值。其現實意義是:對影像獲取位置和姿態無嚴格幾何約束,定焦相機也無需事前檢校,在獲取有效像方匹配點后可重構三維場景準確獲取物方點坐標。
其計算過程是:① 自動特征提取與匹配;② 利用代數誤差的線性估計、幾何誤差的非線性優化、RANSAC思想的自動估計等算法,計算基本矩陣,在相機內參數矩陣已知前提下,計算本質矩陣;③ 在相機內參數矩陣已知前提下,用基本矩陣分解本質矩陣得到投影矩陣;④ 利用投影矩陣和像點坐標重建對應的物方三維坐標,并分解投影矩陣得到相機空間位置和方向;⑤ 在相機內參數矩陣未知情況下,用投影矩陣進行相機自檢校;⑥ 根據自檢校的已知相機內參數矩陣和投影矩陣修正三維坐標;⑦ 利用光束法平差原理進行優化估計。
1.2 技術特點
傳統攝影測量理論根據像點與物點的幾何關系建立約束條件,而多視幾何理論,直接由多視角影像像點建立影像間的幾何關系,推算相機空間位置與方向及像點對應物點的三維坐標。
傳統攝影測量理論的共線方程和共面方程求解未知數是利用最小二乘法原理平差,必須先進行線性化,泰勒級數展開式是原式的近似表達,偏導數所含的僅是微變量,即方程所求的未知數必須具有足夠的小值才能得到足夠穩定的解,這就需要飛行姿態足夠平穩,影像外方位元素具有較為準確的初始值,另外攝影測量理論還需要相機內參數。
多視幾何理論的已知數據僅需要多視角影像上的特征像點坐標,允許相機內參數是未知的,相機內參數可通過重疊影像自檢校計算獲取。其計算過程全自動,計算結果對初始數據非常敏感,所以初始特征點的匹配精度及在影像上的分布對三維模型精度影響較大。
2 實驗方案與精度分析
2.1 多視幾何航測方案關鍵技術
2.1.1 航攝方案
多視幾何理論成功應用的關鍵在于像點網的強度與像方連接點的分布和密度,測繪精度達標的成敗也在于航攝成果是否滿足理想的多視幾何理論條件:像方連接點遍布全部重疊區并匹配準確,所以滿足理想匹配條件的航攝方案對于測繪精度是否達標至關重要。
(1) 大重疊度、高分辨率航攝
根據測量平差理論,多余觀測數越多,平差精度和可靠性就越高[6]。前方交會精度受影像重疊度和交會角大小的共同影響,隨著交會角和重疊度的增大,平面精度在逐步提高,使用多片重疊影像同時進行前方交會,平面和高程交會精度都會達到最高[7]。
實際航攝作業中,考慮到交會精度、效率和成本等綜合因素影響,航向重疊度保持在80%(航向五片重疊),旁向重疊度保持在60%左右為宜,以上重疊度指標均需考慮地形起伏,最高點重疊也必須達到。
以兩視像對為例,空間前方交會的幾何關系如圖2所示,空間物方點平面精度mX可表示為:
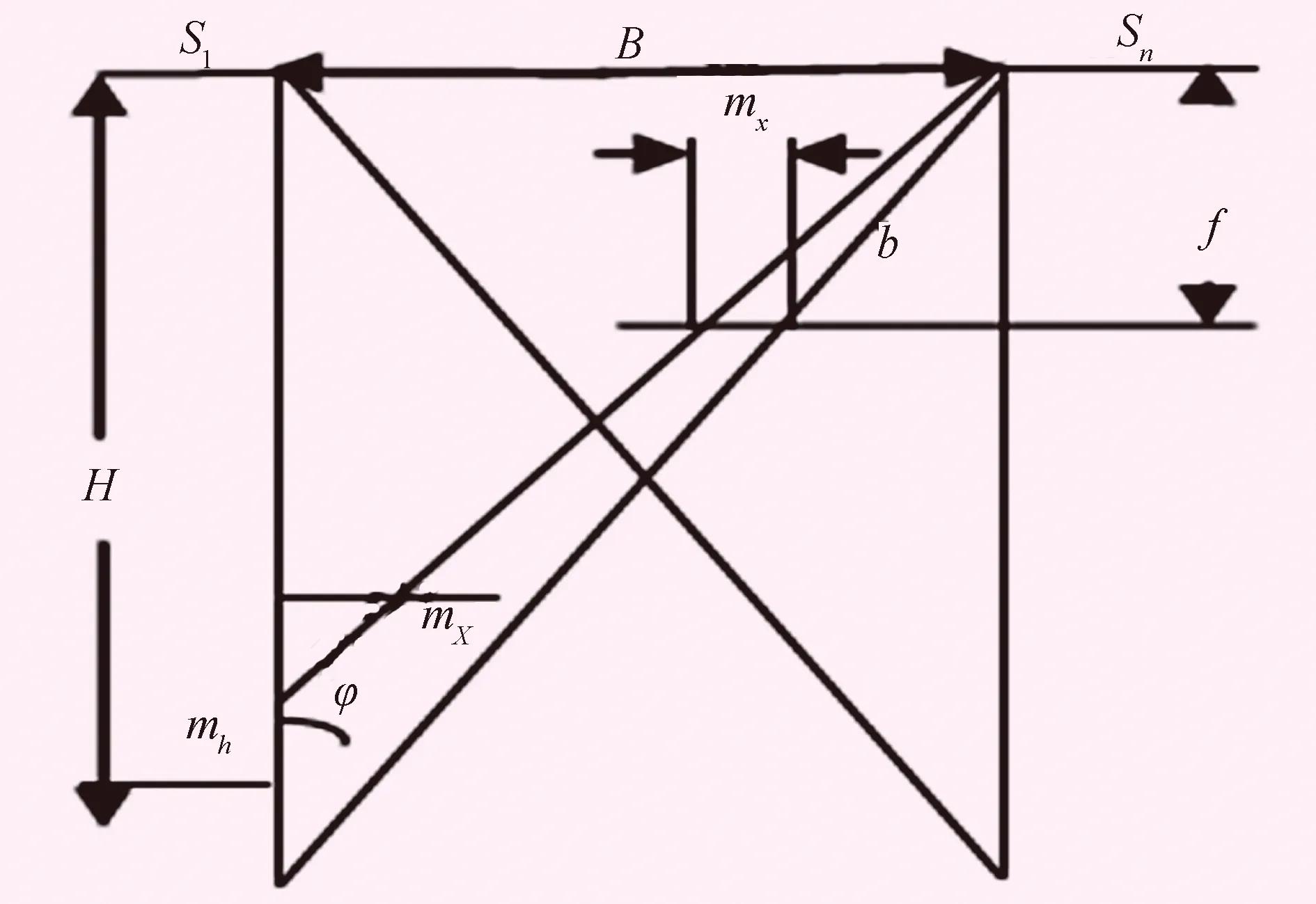
圖2 兩視空間交會幾何關系圖
圖3 顧及地形起伏的嚴密航線設計圖
(5)
像點量測精度mx為1/k個像元,則物點平面精度可表示為:
mX=GSD/k
(6)
所以,物點高程精度mh可表示為:
(7)
式中:k為像點量測精度比例尺分母,反映了像點的匹配精度;GSD為地面分辨率;b為攝影基線長度;f為主距。
從式(7)看出影響無人機航測高程精度的因素:① 影像分辨率越小精度越高;② 基線越長精度越高,大重疊的多視航攝條件下,交會角由間隔最大兩張影像確定,即多視匹配提高了前方交會精度,同時增強了交會精度的可靠性;③ 與像點坐標量測精度成正比。像點坐標精度由匹配精度決定,所以航攝階段除了大重疊度航攝外,還需提高航攝分辨率。在多視匹配條件下,每個連接點具備重疊度數較多(8度重疊以上),物方空間坐標定位穩定性較高,高程精度與平面精度同步,平面精度達標時,高程精度也趨于合格。
基于多視幾何理論的傾斜攝影模型精度一般是影像分辨率的約3倍,即多視傾斜測圖GSD=正射影像GSD/3。建議的航攝分辨率如表1所示。
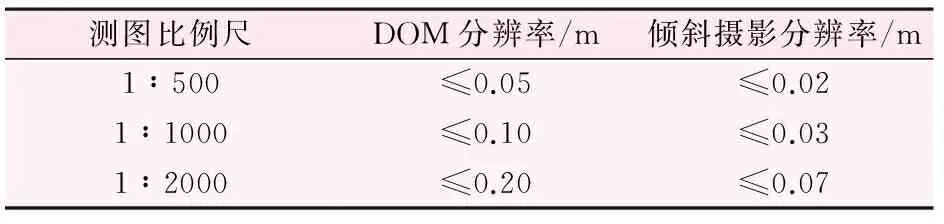
表1 多視幾何傾斜測圖比例尺與航攝分辨率對應表
(2) 顧及地形起伏的嚴密航線設計
航線設計方案需要基于測區地形起伏進行嚴密設計,確保全區無漏洞和重疊度,整個攝區具備較均勻的重疊度,有利于在特征提取像點網強度的均勻和可靠性。地形起伏高差過大時需要根據航攝相機主距進行必要的航攝分區劃分,顧及地形起伏的嚴密航線設計如圖3所示。
(3) 顧及光照條件的相機參數設置
相機參數設置需充分考慮太陽照度、大氣通透性和地物反射強度,光圈設置5.6左右,快門設置最好控制在1/1250 s,ISO需要根據航攝現場光照條件試拍設置,如光線過暗時不建議將ISO曝光補償提升過大(超過400),高ISO補償會導致成像噪點多,后期匹配精度會大幅降低。
(4) 較大面積的弱紋理區域多層航攝
主點和標準點位落水、大面積植被等弱紋理影像處理是攝影測量領域較為空三處理的難題,往往會影響模型相對定向的精度,也是模型接邊差過大的要因。同樣,基于像方匹配解決物方定位的多視幾何理論對像點坐標精度極其敏感,實際作業中為提高影像分辨率往往導致弱紋理區域在單片的面積占比很大,大幅降低了像點特征匹配精度,為提高空三計算的穩健性,降低弱紋理面域在單片上占比,可增加航高,進行多層航攝,在空三計算中聯合平差可有效解決該問題。
2.1.2 像控點方案
多視幾何僅高精度恢復了物方點的相對關系,其物方坐標與測繪工程中的地面坐標存在尺度、方向和位置上的不一致,所以需要進行絕對定向,足夠數量的像控點對提升測圖精度很有必要。傳統攝影測量領域像控點布設原則,航外規范[8-9]有嚴格的基線跨度等技術要求,而多視幾何理論將地面像控點僅用于絕對定向,像控點可均勻分布,像控點必須置于自由圖邊外側。由于多視幾何理論具有對像點的唯一依賴,受拍攝條件、相機畸變和像點誤差傳遞的影響,地物點絕對定位精度會在遠離像控點處衰減,所以足夠密度的像控點格網分布很有必要。
理想的像方匹配結束后,像控點密度可不按照傳統的基線跨度布設,可根據表2像控點格網密度進行布設,如圖4所示,像控點盡量布設在航帶中間便于增加平差時像控點的權重來提高物方測量精度。在自由圖邊拐彎處必須布設平高點,像控點布設需要考慮加密分區公共像控點的規則分布,這是確保加密分區接邊精度的關鍵。

表2 大疆精靈4Pro的建議像控點分布密度表
2.1.3 空三計算與三維建模
當攝區過大時加密區選擇需要根據像控點布設方案進行,加密分區需要重疊1排公共像控點,和1條航帶影像。從多視幾何原理和特點可知,計算結果對匹配的像點坐標很敏感,所以空三計算前對航攝重疊小、大面積落水、成像不清等影像匹配點精度和分布的原始影像需要進行篩選和預處理。
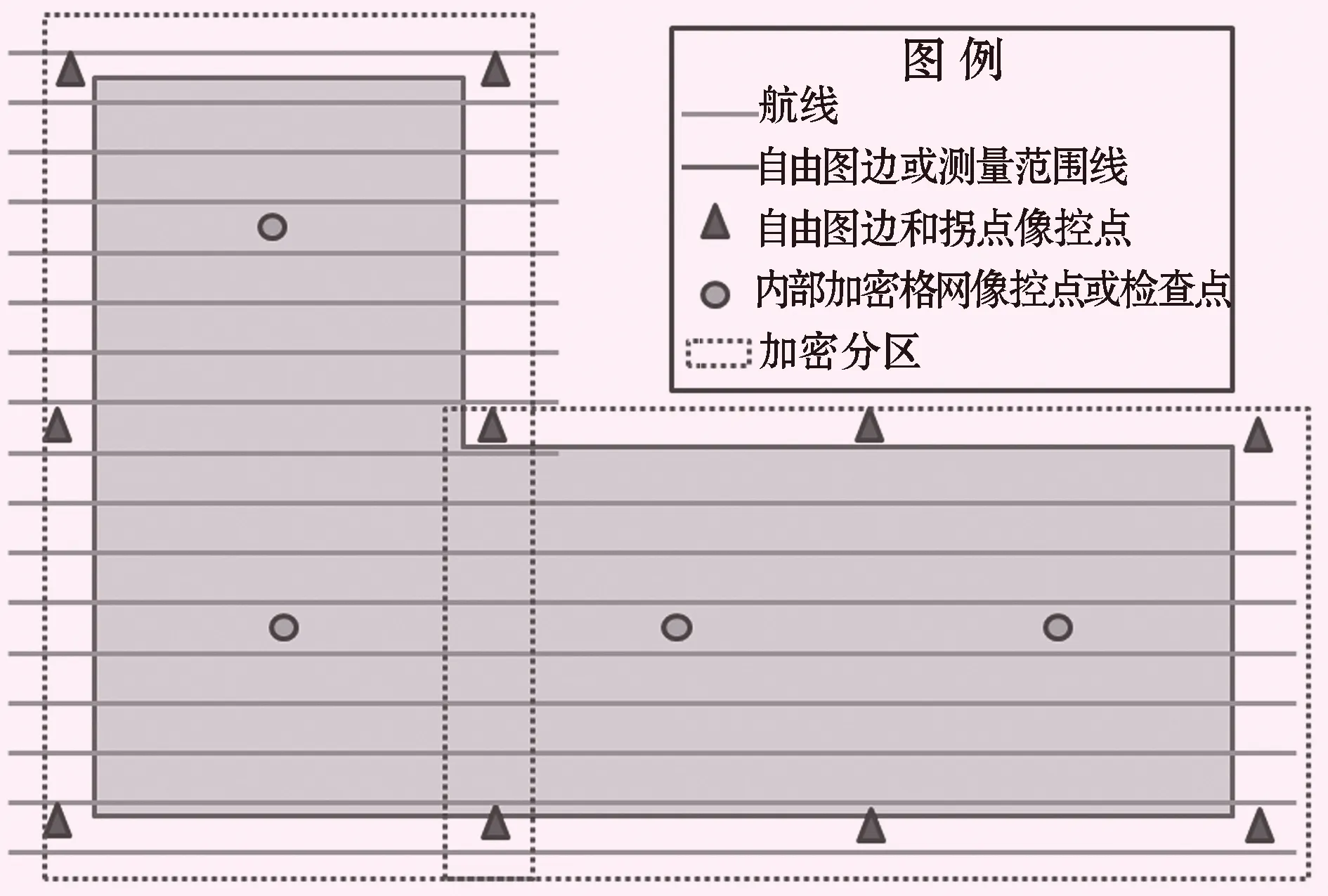
圖4 多視幾何理論下的像控點布設方案圖
空三加密流程從框架到局部的迭代計算更為穩妥,更易發現像控點粗差。全部像控點添加完畢后,盡量調高像控點權值來提高絕對定向精度,同時減少模型精度對像點的敏感度。
大面積弱紋理區(水域、植被、沙漠)會直接影響像方連接點的密度和精度,很可能造成空三匹配失敗無法建模或建模漏洞,測圖精度會有不同程度降低,這點也是傳統攝影測量理論的技術痛點,多視幾何理論可將多層航攝影像數據納入空三聯合平差建模,精度會有一定程度提升,分架次給定不同權值參與平差需根據影像質量和空三人員經驗調整。另外,飛行前對航攝相機進行專業的三維檢校場檢校可獲取相機較為準確的內參數,提高像方匹配精度,在弱紋理條件下的連接點分布不均時,可提高相機外參數的估計精度。
2.2 應用與精度分析
2.2.1 飛行平臺與傳感器
試驗采用消費級大疆精靈4Pro無人機影像采集平臺。質量輕便易攜帶,飛行操作簡單上手快,起降條件限制少,是很好的小面積地形測繪與建模的影像獲取平臺。根據顧及地形起伏的嚴密航線設計方案,對不同測區進行精度估算,采用上述像控點布設方案布設地標式像控點,航攝現場基于DJI SDK二次開發的航攝任務規劃地面站,根據像控點分布和加密分區進行嚴密理論飛行。
2.2.2 實驗區選擇
選擇不同地面分辨率和不同地形特征三類區域對以上方案進行驗證,各實驗區范圍與像控點分布如圖5所示。
【A類】:地形平坦,平均高程海拔50.00 m,最大落差30 m,測圖面積2 km2,植被水塘較為集中,獲取影像402張,像控點22個,檢查點30個。預期測繪精度1∶1000地形圖。
【B類】:丘陵地形,平均高程海拔3 800.00 m,最大落差100 m,弱紋理草原河道,測圖面積12 km2,獲取影像6 020張,像控點57個,檢查點82個。預期測繪精度1∶2000地形圖。
【C類】:山地地形,平均高程海拔200.00 m,最大落差150 m,地表起伏較大,植被茂盛。測圖面積4 km2,獲取影像2 331張,像控點35個,檢查點75個。預期測繪精度1∶2000地形圖。
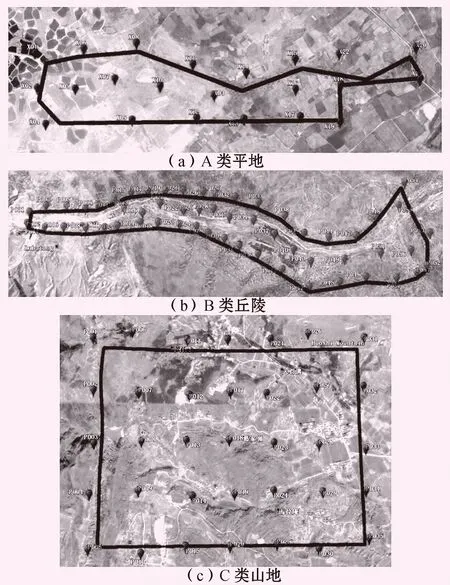
圖5 3類實驗區像控點分布圖
2.2.3 精度分析
多視幾何因其公式推導過程未線性化,其結果很難利用傳統誤差評定方法進行評估,所以目前只可在測繪出的模型精度上進行實測檢查。利用RTK方式實測檢查點驗證三維模型精度,用均方根誤差表示位置精度[10],設檢查點實測坐標為Ci(xi,yi,hi),三維模型量測對應點模型坐標為Mi(xi′,yi′,hi′),則該點平面誤差DXYi和高程誤差Dhi用式(8)表達,多個檢查點均方根誤差SRMSE用式(9)計算。
(8)
(9)
雖無人機行業指導文件[11]對無人機測圖精度給出了限差較寬松的B類標準,為提高地形圖應用的適用性,本文擬用國家攝影測量內業規范[12]的嚴苛標準對提出的方案進行精度評價。表4統計出了3類實驗區統計的檢查點精度指標,比對表3的國標精度限差要求,對實際達到的精度等級給予了評價。圖6、7、8對3類實驗區檢查點精度進行了統計。
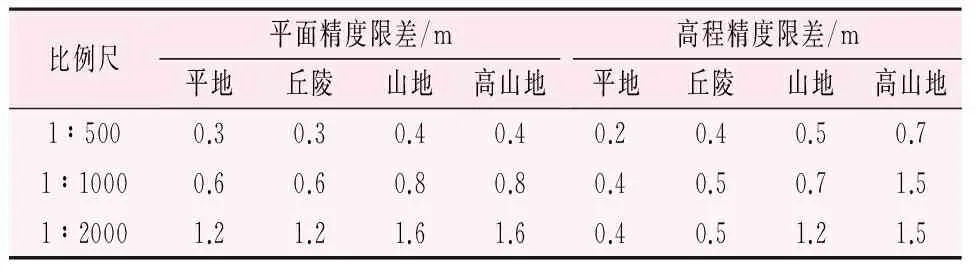
表3 各比例尺地形圖精度要求限差表
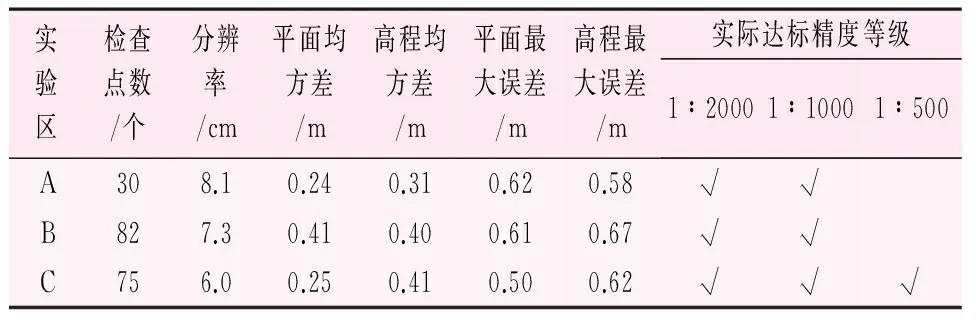
表4 各實驗區的檢查點精度統計表

圖6 A類實驗區檢查點精度統計圖
實驗結果表明:
(1) 根據文中提出的測繪方案,針對平地、丘陵和山地各類地形進行實測檢查點精度統計,1∶2000和1∶1000比例尺測繪精度完全滿足規范要求,平面和高程精度均同步達標,成功解決了傳統攝影測量高程精度較差的行業痛點。
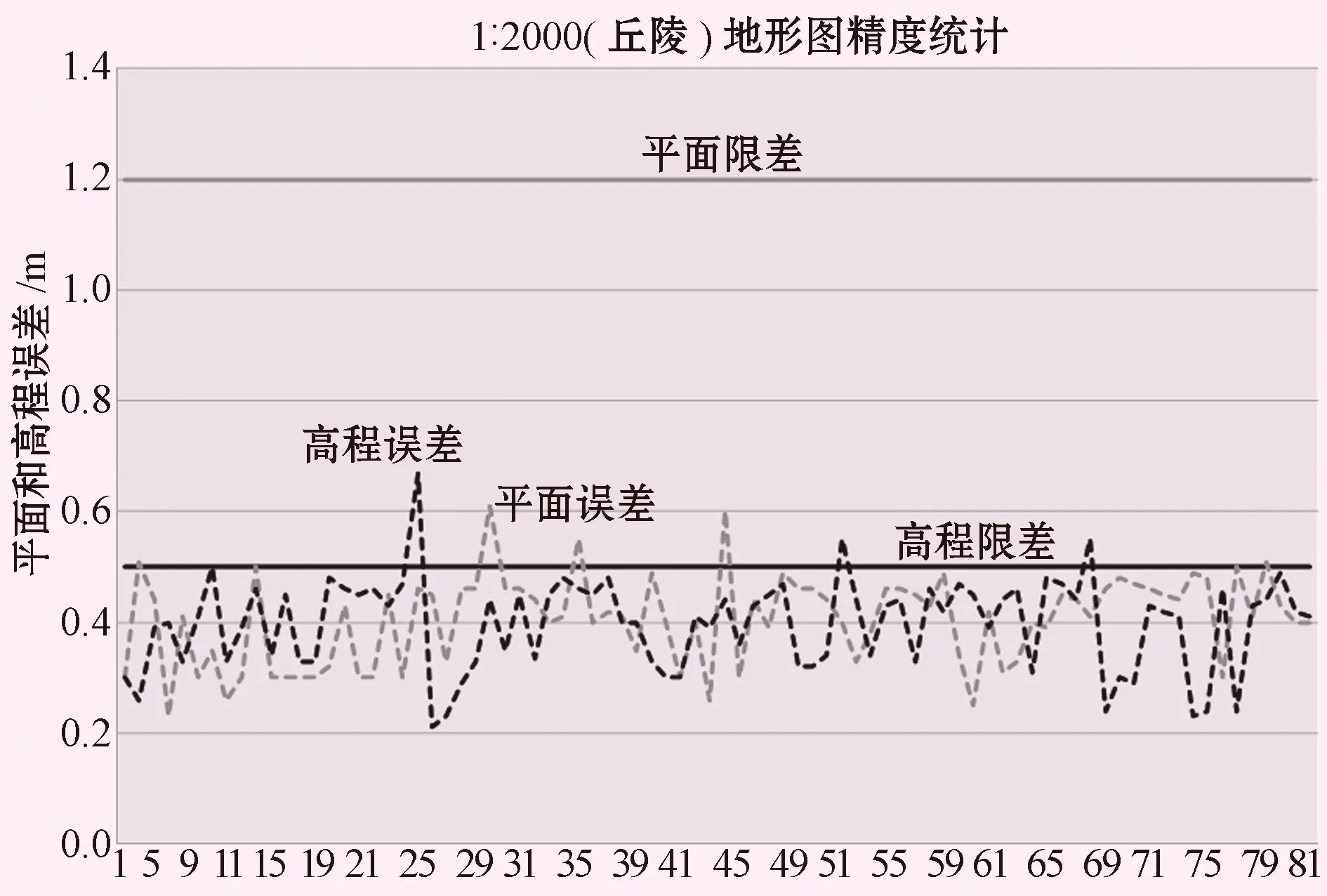
圖7 B類實驗區檢查點精度統計圖
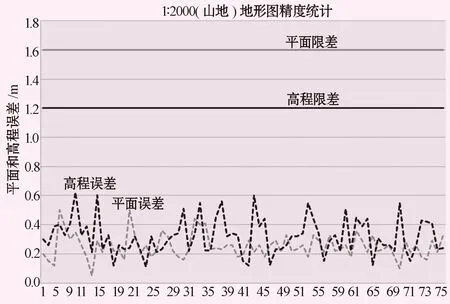
圖8 C類實驗區檢查點精度統計圖
(2) 根據A、B類實驗區精度統計圖可看出,平面和高程精度達標時,有少量檢查點超限但數量占比極小(<6%),表明了精度指標的準確性和評價指標的穩定性。
(3) 從表3、4和圖8分析,因測區范圍較為規則,像控點分布均勻,C類實驗區的平面和高程精度達到1∶500地形圖精度指標,因植被的干擾,局部檢查點高程不符值較弱,所以在測1∶2000和1∶1000地形圖時,外業像控點數量可以再減少。
(4) B類丘陵實驗區分因地標覆蓋大面積草地,屬弱紋理區域,航攝時天氣變化頻繁,多架次匹配等原因,像方網匹配精度較低,因多視幾何對像點坐標敏感,所以像控點密度相當時,測圖精度稍低于C類山地實驗區,這種敏感性表現得很明顯。
(5) 航攝分辨率更高、像控點分布更均勻時,平面和高程精度優于1∶500比例尺地形圖精度限差。
3 結 語
文中提及的基于多視幾何的多旋翼無人機大比例尺測圖方案在平地、丘陵、山地均進行了1∶2000、1∶1000、1∶500比例尺地形圖精度驗證,具備穩定的平面和高程測繪精度。多視幾何理論對相機和飛行姿態無苛刻要求,但物方定位精度對像點坐標敏感,所以文中提出了大重疊度高分辨率航攝、顧及地形起伏的嚴密航線設計、顧及光照條件的相機參數設置、較大面積的弱紋理區域多層航攝的實用航攝方案,同時給出高精度像控點布設方案和空三處理技巧,為消費級多旋翼無人機在大比例地形圖高精度測繪提供實用可靠的解決方案。
該方案的技術優勢在于:低成本,靈活操作,便于上手,精細的三維模型可以減少外業調繪工作量,相比小面積實測方案減少人員和設備配置,一定程度縮短工期。同時也有其局限性:不宜大面積測圖,建模過程計算量較大,建模過程損失電力桿等微小點狀地物較多,需要后期補充調繪和補測予以解決。
參考文獻:
[1] 任志明,李永樹.基于姿態數據的無人機影像自動刺點功能研究[J].測繪通報,2011(04):44-46.
[2] 程婷婷,方源敏.提高我國西南地區空三加密精度的幾種方法[J].測繪與空間地理信息,2017(04):216-218.
[3] ANDREW A M.Multiple View Geometry in Computer Vision[J].Kybernetes.2001,30(9/10):1865-1872.
[4] 鄧非,張祖勛.基于序列影像的城市三維建模[J].計算機工程,2007,33(08):208-212.
[5] Hartley R, Zisserman A. Multiple View Geometry inComputer Vision[M].Cambridge: Cambridge University press,2000.
[6] 武漢大學測繪學院測量平差學科組.誤差理論與測量平差基礎[M].武漢:武漢大學出版社,2003.
[7] 張永軍,張勇.大重疊度影像的相對定向與前方交會精度分析[J].武漢大學學報(信息科學版),2005,30(02):126-130.
[8] 中國國家標準化管理委員會.1:500 1:1000 1:2000地形圖航空攝影測量外業規范:GB/T 7931-2008[S].北京:中國標準出版社,2008.
[9] 國家測繪局.低空數字航空攝影測量外業規范:CH/Z 3004-2010[S].北京:測繪出版社,2010.
[10] 張祖勛,張劍清.數字攝影測量學[M].武漢:武漢大學出版社.2012:65-67.
[11] 國家測繪局.低空數字航空攝影測量內業規范:CH/Z 3003-2010[S].北京:測繪出版社,2010.
[12] 中國國家標準化管理委員會.1:500 1:1000 1:2000地形圖航空攝影測量內業規范:GB/T7930-2008[S].北京:中國標準出版社,2008.
猜你喜歡
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11