車載GPS/DR組合導航及地圖匹配修正技術研究
2018-04-26 01:46:44周瑞華高意峰
現代計算機 2018年5期
周瑞華,高意峰
(深圳市凱立德科技股份有限公司,深圳 518040)
1 常見車載導航技術
在現代車輛出行過程中,導航定位技術已經廣泛普及。比較典型的方式是采用GPS定位技術,并將解算位置在數字地圖中轉換為道路信息。帶有導航路徑規劃功能的更進一步,還可以根據當前位置,目的地位置,地圖道路分布計算出最優或較優的行駛路徑供駕駛員參考。
然而GPS定位系統在市區或類似環境工作時,容易受到諸如高樓等建筑物的方向性遮擋影響,導致定位精度差(星的幾何分布不佳)或者無法定位(可見星數目小于4),這時就需要通過一些輔助導航系統來保證定位模塊提供更為穩定、精確的位置輸出,為后續服務提供可靠的數據保證。
車載GPS/DR組合導航系統[1]就是一種典型的解決方案,利用GPS和里程計,航向陀螺等傳感器,采用Kalman濾波技術構成組合導航系統,可以在GPS沒有信號時,短時間內提供一定精度的定位結果。同時可以通過地圖匹配修正技術,獲得更高精度,更加穩定的導航位置。
典型的組合導航系統如圖1所示:

圖1 車載組合導航系統
2 GPS/DR組合導航技術
車載GPS/DR組合技術中,航位推算(Dead Reckoning,DR)系統的配置一般有兩類:一類是里程計加航向陀螺的配置[2];一類是加速度計加陀螺儀的MEMSIMU配置[3]。相對而言里程計加航向陀螺的模型較為簡潔,通用性強,故以此為基礎進行設計。
2.1 系統模型
狀態變量選擇為:

表1 GPS/DR組合導航系統狀態變量表
動態方程為:

2.2 觀測模型
觀測變量為:
那么觀測向量Y=[λ φvH SΔNodoVRG]T。

表2 GPS/DR組合導航系統觀測變量表
觀測方程為:
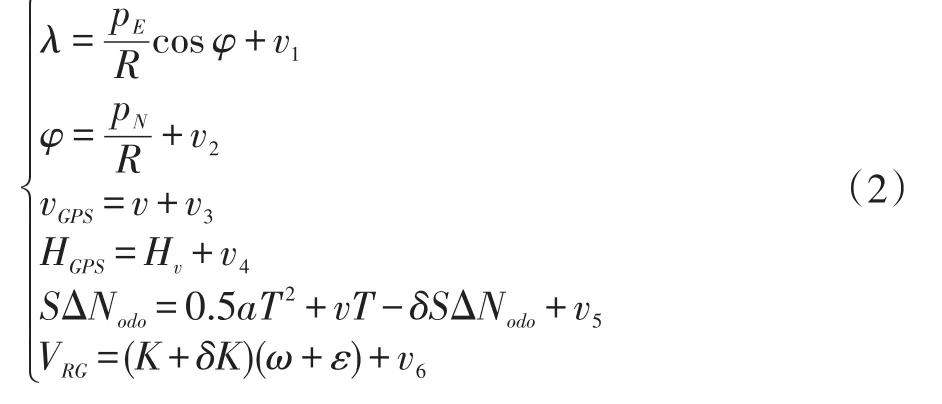
簡寫為:

2.3 濾波算法
擴展Kalman濾波中要對非線性方程離散、線性化;這個過程必須滿足F,H陣和真實值非常接近。可以通過下面的方法判斷線性化是否有效:

當上述條件不滿足時,EKF計算的協方差會趨向于過度優化,最終導致系統發散。初始化誤差協方差矩陣時最容易發生,故當處于臨界有效及初始化狀態時,可以通過增大噪聲協方差矩陣來提供補償。
GPS/DR的EKF算法如下:
(1)初始化:

(2)狀態預測:

(3)新息更新:

3 地圖匹配修正技術
在地圖匹配算法[4]中,系統比較其他導航系統給出的位置結果和數字公路地圖,當導航結果偏離公路時,可以獲取垂直于公路方向的位置修正。在某些特殊路段,如果沿路段進行拐彎,那么利用此段匹配可以獲得兩個方向的修正結果。

圖2 地圖匹配算法流程
4 組合導航技術的自動駕駛擴展
上述導航系統的定位精度一般可以穩定在10m左右,而且對于短時間丟失導航衛星數據也具有良好的適應性。如果在加上激光測距雷達和機器視覺系統(攝像成像)那么就可以構成一個簡要版本的自動駕駛傳感器組擴展,進一步實現車道級別的導航定位功能。

圖3 車載組合導航系統的自動駕駛擴展
參考文獻:
[1]GNSS與慣性及多傳感器組合導航系統原理.Paul D.Groves.國防工業出版,2015.
[2]L.Zhao,W.Y.Ochieng,M.A.Quddus and R.B.Noland.An Extended Kalman Filter Algorithm for Integrating GPS and Low-Cost Dead Reckoning System Data for Vehicle Performance and Emissions Monitoring.Journal of Navigation,2003,56(2):257-275.
[3]SY Cho,SC Wan.Robust Positioning Technique in Low-Cost DR/GPS for Land Navigation.IEEE Transactions on Instrumentation&Measurement,2006,55(4):1132-1142.
[4]MA Quddus,WY Ochieng,L Zhao,RB Noland.A General Map Matching Algorithm for Transport Telematics Applications.Gps Solutions,2003,7(3):157-167.
