嫦娥三號軟著陸軌道設計與控制策略問題
2018-04-24 05:56:06孫麗萍楊景超劉士龍趙靜王梟婷
新型工業化 2018年12期
孫麗萍,楊景超,劉士龍,趙靜,王梟婷
(1. 河北交通職業技術學院電氣與信息工程系,河北 石家莊 050091;2. 河北中醫學院, 河北 石家莊 050200)
0 引言
嫦娥三號著陸器實現了我國首次地外天體軟著陸任務,著陸器的制導、導航與控制系統是最重要的分系統之一。嫦娥三號在著陸準備軌道上的運行質量為2.4 t,其安裝在下部的主減速發動機能夠產生1500 N 到7500 N 的可調節推力,其比沖(即單位質量的推進劑產生的推力)為2940 m/s,可以滿足調整速度的控制要求。嫦娥三號以(19.51 W,44.12 N,-2641 m)為預定著陸點,探測器從環月圓軌道變到軟著陸準備軌道的變軌點為遠月點,遠月點距月球100 公里。近月點距月球15 公里,是探測器軟著陸過程的起始點;著陸軌道為從近月點至著陸點,其軟著陸過程共分為6 個階段[1-3]。嫦娥三號著陸軌道如圖1 所示。
為了保證登月探測器著陸的高安全性,其著陸過程的每個步驟都有很高的要求,對其著陸軌跡及著陸器的控制策略的研究對于探測器的探測任務完成及航天技術水平的提升有著重要意義[4-5]。本文研究了嫦娥三號軟著陸過程的軌道設計和控制方案,本文假設:嫦娥三號所帶燃料是充分足夠的,不考慮空間飛行器上各點因燃料消耗而產生的位移,在對衛星和空間飛行器進行軌道估計時,認為作用于其上的所有外力都通過其質心,衛星只受重力影響,空間飛行器除自身推力外只受重力影響,忽略地球及其他星體的攝動影響。然后根據現有數據計算著陸軌道近、遠月點的坐標和速度,從而制定嫦娥三號的著陸軌道,并設計最優控制方案,最后對設計的方案和模型做誤差和敏感性等方面的評價與分析。

圖1 嫦娥三號著陸步驟圖例 Fig. 1 Legend of landing steps of Chang'e III
1 嫦娥三號近月點和遠月點位置和速度的求解
探測器運動軌跡是在一個球坐標系里的三維運動,直接分析運動過程太過冗雜,故采用簡化模型的方法對簡化后的模型進行操作。假設月球的經線圈與建立的坐標系在同一平面,并且近月點遠月點以及月心和著陸點組成的平面也與經線圈在同一平面內,這樣可以保持經度的大小,簡化為只需求出緯度的變化。由于模型簡單跟實際過程相比誤差較大,在其著地過程中加入了推力沖量的作用,使空間飛行器在推力和月球引力的作用下保持加速度不變的拋物線運動,建立平衡方程。在此運用萬有引力定律和開普勒第二定律分別對遠月點、近月點的速度求解。由此建立動力學模型,如圖2,A 點為著陸準備軌道的近月點,B 點為著陸準備軌道的遠月點,R 為月球的平均半徑:R= 1737.013km , G=6.67*10-11N*m2/kg2, M月= 7.3477 × 1022kg 。
首先求出近遠月點的檢驗速度:
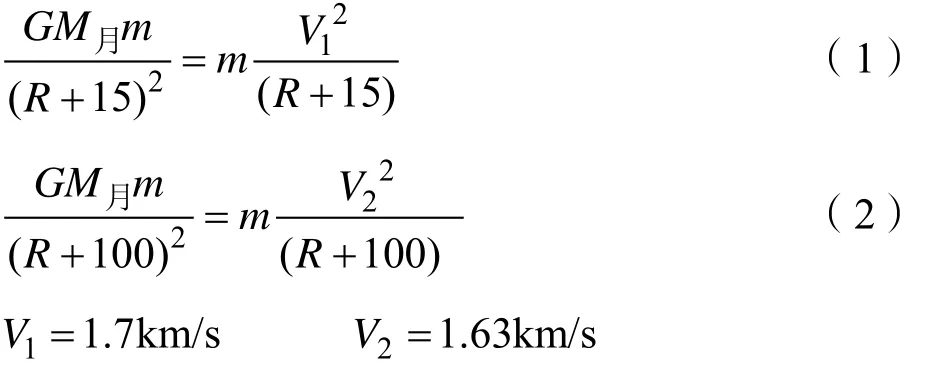

圖2 簡化的平面軌跡圖 Fig. 2 Simplified plane trajectory
對由近月點降落到落地點的曲線進行求解,再根據弧線的長度求出θ 角的大小進而確定變化后的緯度。

解得 g月=1.62m/s2。建立最簡單的模型:將該弧線的運動過程看作一個豎直方向的自由落體,水平方向的勻減速直線運動。求解出l=106013.626m,θ =3.5°。

但是這種模型誤差太大無法精確地來描述緯度的變化,所以我們在這個模型的基礎上進行改進,引入推力的沖量這一物理量,根據沖量等于動量之差并且使嫦娥三號在這個著陸軌道上月球引力和推力共同作用的合力大小方向是一定的,求出V1= 1.6922 e + 03m/s , V11= 1.6139 e+ 03m/s , F= 5127.3N, T =457.3721s,θ = 12.93110。近月點位置:57.0511N,19.51W 距月心距離為1752km;遠月點位置:57.0511S,160.49E 距月心距離為1837km。
2 嫦娥三號著陸軌道和6 個階段的最優控制策略
(1)主減速段
主減速段主要用于減速制動,其主要從高度(距參考月面) 約15km(約1.6922 km/s)~約3 km(約 57 m/s)。該階段是軟著陸過程中消耗的推進劑最多,且耗時也最長。因此此階段的主要目標是推進劑消耗優化。

圖3 月球軟著陸極坐標系 Fig. 3 Lunar soft landing polar coordinate
針對基于最省燃料的月球軟著陸軌跡優化問題。根據如圖3 所示的示意圖,建立基于動力學方程的數學模型:
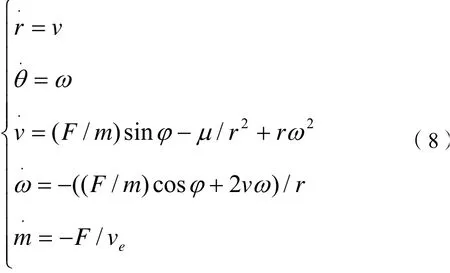
其初始條件為:
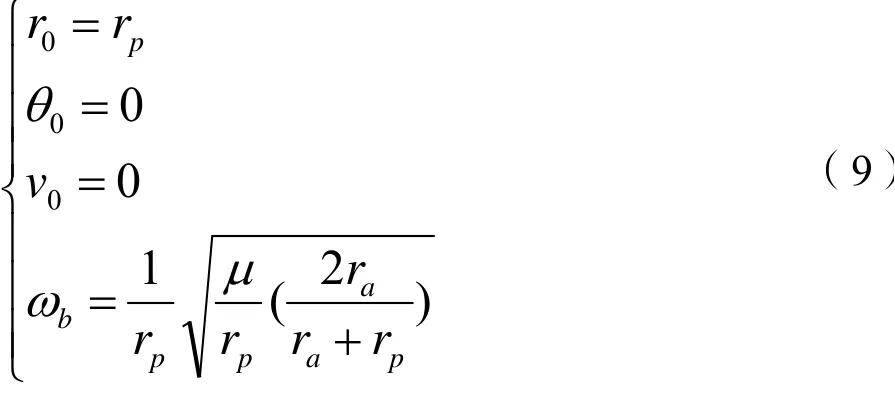
在上式中r,v,θ,ω 分別為著陸器與月心距離,徑向速度,極角,極角角速度。μ 為月球引力常數,F,m,φ ,ev 分別為制動發動機推力,陸器質量,推力方向角,比沖。pr 和ar 為近、遠地點半徑。優化目標為著陸過程中燃料消耗最少:

本文采用直接法進行軌跡優化,采用函數逼近法進行參數化。利用增加了局部搜索策略的十進制蟻群算法對該優化問題進行研究,用到了蟻群算法中的十進制蟻群算法、路徑轉移規則和信息素更新規則等,局部搜索策略,用于多元連續函數的十進制蟻群算法。求解知消耗燃料1.05t,消所耗時間495s。在接下來的優化控制策略,因為燃料損耗不是太大,不將燃料最小看做優化策略,假設燃料不再改變。
(2)快速調整階段
主減速結束后到離月面2.4km(水平速度0m/s)。由主減速階段計算出3km 時的速度方向基本垂直,為優化使調整時間最小,使得推力最大。


(3)粗避障段
粗避障段是離月面2.4km 到100m 時為了避開大的隕石坑,規劃初步落月點。
在2.4km 處對正下方月面2300×2300m 的范圍進行拍照,為避開大的隕石坑,并嫦娥三號在月面的垂直投影位于預定著陸區域的中心位置。
以圖4 所示的著陸拍攝到的圖像為例,首先將尺寸為2300*2300 的圖4 中較大的“坑”在原圖片中抹去,然后將附件3 分割成100*100 個23*23 的區域。求每個區域的方差,方差最小的區域即為相對最平穩的區域。
求出最平穩區域為圖中點(425.5,1943.5),著陸器與目標地點的投影距離為1074m,偏角為25°。

圖4 粗避障段飛行目標圖 Fig. 4 Flight target in obstacle avoidance section
實現粗避障軌跡最優化,運動軌跡方向應沿初狀態點與目標點連線方向,則推力加速度大小Fa和月球引力加速度大小g月計算如下:

α 為推力方向與引力方向的夾角,本文β 取65°,α 取9°。
則合加速度在徑向和航向的分量分別為:

如果保持徑向和航向的加速度不變,則可確定下降高度和航程為:

式中, xfv 和xov 分別為接近段終端的徑向和航向速度, zfv 和zov 分別為接近段入口的徑向和航向速度。
于是,標稱的接近段時間為

求解得到時間為125s。 (4)懸停階段
懸停階段時著陸器重力由變推力發動機平衡,且此時著陸器是懸停狀態,其速度為0。通過對此目標進行動力學求解,可求解得到時間為15s。
(5)精避階段
在距月面100m 處,對其附近區域100m 范圍拍照。首先將尺寸為1000*1000 的如圖5 所示的圖像中較大的“坑”在原圖片中抹去,然后將圖5 分割成50*150 個20*20 的區域。求每個區域的方差,方差最小的區域即為相對最平穩的區域。
求出最平穩區域為圖中點(690,630),著陸器與目標地點的投影距離為23m,偏角為18.21°。

圖5 精避障段飛行目標圖 Fig. 5 Flight target map of eliminating obstacles
安全著陸點為著陸點上方約30 m 處,相對月面下降速度為1.5 m/s,終端水平速度為0。根據主發動機最小推力(minF 考慮一定余量)計算著陸器能實現的最大下降加速度 max da 。從100m 到30m 的垂直方向的角度。

mass 為著陸器質量。如果加速和減速兩段的加速度大小相等(即2a =1a ), 則可得到如下關系:

由此可解得最大下降速度mv ,于是加速度大小可得到

如果 a>maxda ,則取1a =maxda ,則可解算出

否則,取1a =a,2a =a。根據加速和減速2 段的加速度取值,確定最大下降速度:

進而可以確定上下 2 段的切換時間

由此可求出加速和減速兩段分別花費的時間的時間為14 和11s,總時間為25s。
(6)緩速下降階段
緩速下降對在高度 30 m 以上垂直方向,以及高度30 m 一下進行控制優化。此階段求解得到的時間為20s。整個軟著陸過程共耗時678 秒,消耗燃料大約1.05t。
3 結論
模型的優點:
(1)本文研究了嫦娥三號軟著陸中各個階段的最優軌跡及其控制方案。通過改進的函數逼近法,把軌跡優化轉化為參數優化的問題。基于改進的基本蟻群算法,并引入增加局部搜索策略,提高算法的精度和收斂速度。并將優化策略應用于整個控制方案的優化中。
(2)在軟著陸的不同階段,采用不同的優化標準,從而得到整體優化,也有效地減少了計算量。
模型的不足:在快速調整段,直接將速度視為垂直向下,但在實際運動時,有水平方向的速度。
模型的改進:
本文采用的是二維坐標系,模型適應于求非定點軟著陸。定點著陸應該考慮天體自轉在三維坐標系下建模,利用慣性系下三維定點軟著陸問題建模。首先在慣性坐標系下考慮月球自傳運動,基于軌道交會思想,確定新的運動軌跡。其次,著陸器水平速度的方向允許在與垂直速度垂直的平面內轉動,則整個軟著陸過程中,著陸器的合速度方向就會在空間中發生改變,運動軌跡也會變成一個三維軌道,更為接近實際。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
