基于Kharitonov理論的巡檢機器人關節電機魯棒控制
2018-04-23 09:31:20邵嶽
電氣技術 2018年4期
關鍵詞:系統
邵 嶽
(沈陽工業大學電氣工程學院,沈陽 110870)
巡檢機器人是一種沿高壓架空輸電線路行駛代替或者輔助人工巡檢的特種電力作業機器人,在國民生產和日常生活中占有重要地位,應用前景非常廣闊[1]。從控制的角度看,機器人的有效控制是保證正常巡檢的前提,但是機器人存在多輸入、多輸出、強耦合、非線性等特征,使得在實際工程應用中從宏觀上得到機器人完整精確模型很困難。因此本文分解機器人的控制體系結構,從微觀層面入手,以機器人的關節電機為研究對象,建立其PID閉環控制系統數學模型。考慮到關節電機PID參數很容易因野外惡劣氣象條件、高空風載擾動、高電壓強電磁干擾、以及電機的電樞反應,電機本身溫度變化時,關節主電路的電阻,電感都會變化,這些都會影響電機標稱值的改變。此外電機長時間的運行它與傳動機構在結合處會的磨擦損耗,電機所帶負載發生變化以及機器人運行在不同工況等,這些都會影響電機參數。以上不確定性因素加大了機器人控制的難度,影響機器人機械臂控制的精度和穩定性。在某些極端情況下,可能引起機械臂與線路上絕緣子、懸垂線夾、防震錘等障礙物發生碰撞、干涉甚至從高壓線上脫線,造成輸電線和機器人的損壞和巨大經濟損失。因此,在控制過程中必須根據系統的運行狀態實時對機器人關節控制器的PID參數進行在線自適應調整,以確保在不確定性存在的情況下機器人在作業過程中依然保持較高的控制精度和較好的穩定性。目前相關文獻已提出了基于滑模變結構理論[2]、模糊理論[3]、神經網絡[4]、遺傳算法[5]及其相結合的很多的 PID 智能控制方法[6],但這些大都是在忽略不確定性因素和擾動的理想情況下進行的。HUANGYJ[7]、彭瑞[8]、徐峰[9]等人提出了基于區間多項式理論的參數不確定系統魯棒控制方法,Ho M T[10]提出了基于H∞理論的魯棒PID控制方法但被控對象大多數是針對工業控制系統而非機器人的關節電機。呂永健[11]、恒慶海[12]等針對被控對象的抗干擾能力提出了直流電機的 H∞魯棒控制策略,但都只是單獨的研究電機的魯棒控制而沒有聯系到機器人。王鵬[13-14]等人在建立巡檢機器人機械臂各類動作運動模型的基礎上提出了基于 HJI不等式的架空輸電線巡檢機器人的魯棒控制,趙浩泉[15]等人提出了基于混合靈敏度的水下機器人魯棒控制研究,劉開周[16]等人提出了基于結構奇異值的水下機器人魯棒控制研究,但這些都只是從宏觀上對機器人的控制進行研究而沒有具體到機器人各個關節的控制。因此,當前針對高壓輸電線路巡檢機器人特別是從微觀層面上分析關節電機魯棒控制這方面的研究很少。1978年原蘇聯數學家卡里托諾夫提出了著名的Kharitonov定理,在處理參數不確定系統的魯棒控制問題上取得了重大突破,基于此,本文將Kharitonov定理與關節電機的魯棒控制結合起來,提出一種針對高壓輸電線巡檢機器人關節電機參數不確定PID控制系統的魯棒控制策略,其目的是控制機器人關節電機在存在不確定因素和擾動的情況下,穩定工作保持優秀的控制品質,為機器人正常巡檢提供有力保障。
1 巡檢機器人的控制體系結構和關節電機建模
1.1 巡檢機器人的控制體系結構
根據巡檢機器人控制體系結構特點,可將其分為作業規劃、任務協調、動作執行3個層面,如圖1所示。作業規劃主要包括巡檢和故障處理;任務協調主要包括線上行走、障礙物識別、越障等;動作執行主要包括機械臂的上升、下降、平移、旋轉。對巡檢機器人機械臂各類動作的控制本質,可歸結為對各關節電機的控制,電機動作與反應直接決定了機器人在線上的運行狀態和效果,因此關節電機控制的穩定性在巡檢機器人的控制體系中占有至關重要的作用,其是巡檢機器人正常工作的必要條件。

圖1 巡檢機器人控制體系結構
1.2 巡檢機器人的關節電機建模
巡檢機器人各個關節的運動的總和表現在巡檢機器人本體的運動,而每一個關節的運動又表現為關節電機的轉動。要對巡檢機器人的關節電機實施有效控制,首先需建立其控制模型,本文以巡檢機器人行走輪關節為例建立關節電機數學模型,機器人關節電機電路模型如圖2所示。圖2中,u為電樞電壓,i為電樞電流,R為電樞電阻,L為電樞回路電感,E為反電動勢,J為轉軸轉動慣量,w為轉軸角速度,B為粘滯摩擦系數,ka、kb為與電機有關的常數。

圖2 巡檢機器人關節電機電路模型
對電樞回路列KVL微分方程可得

逆電動勢為

將式(2)代入式(1)得

對轉軸列轉矩平衡方程可得

對式(3)取拉普拉斯變換得

對式(4)取拉普拉斯變換得

由式(5)、式(6)可得

由式(7)可得關節電機控制系統框圖如圖3所示。

圖3 巡檢機器人關節電機控制系統結構框圖
由圖(3)可求得關節電機的傳遞函數為

則G(s)可簡寫為二階系統的標準形式:
本文以式(9)為被控對象,通過調節電機輸入電壓來控制電機輸出的角度,再通過傳動機構來控制機械臂的運動,最后通過反饋來調節輸入形成關節電機閉環控制系統結構如圖4所示。

圖4 巡檢機器人關節電機魯棒控制系統結構圖
在擾動d的作用下被控對象G(s)中參數P、Q、M在一定范圍內攝動,為克服擾動的影響需設計電機的魯棒PID控制器,控制的目標是要動態尋找一組合適的魯棒PID控制參數,使得各關節電機在有擾動和參數不確定的情況下仍然能夠協調穩定工作保持魯棒鎮定,進一步提高巡檢機器人在作業過程中各類動作的穩定性、準確性和抗各類干擾的能力,實現巡檢機器人的線上正常自主作業。
PID控制器的傳遞函數為

系統的閉環特征方程為

將式(9)、式(10)代入式(11)得


2 Kharitonov理論及巡檢機器人關節電機魯棒PID控制分析
式(13)中, Kp、 Ki、 Kd為PID控制器的控制參數,在有擾動的情況下需要動態調整,P、 Q*、M*是與電機有關的常數,理想情況下是不變的,但在機器人作業過程中各種因素使得P、 Q*、 M*難以精確測定,且魯棒PID參數的在線調整也使得 Q*、M*會動態變化,因此式(13)巡檢機器人關節電機模型閉環特征多項式是一個參數不確定的3階多項式。此類問題適合用Kharitonov定理進行穩定性分析。以下將給出Kharitonov定理及其推廣,并分別對機器人關節電機的魯棒穩定性進行分析。
2.1 Kharitonov定理及關節電機魯棒PID控制分析
巡檢機器人關節電機PID控制系統魯棒穩定充分條件的推導如下。

由勞斯判據可得三階系統穩定條件為

Kharitonov定理要求多項式系數變化是相互獨立的,系數變化在一個矩形內部區域,但實際機器人電機控制系統式(13)的系數還與PID參數有關,此時系數應在矩形對角線曲線之上,所以只要保證此區域的穩定就可以保證系統魯棒穩定,但Kharitonov定理給出的確是全部矩形的穩定條件,基于上述分析可知Kharitonov定理參數的變化域包含了實際系統參數的變化域,因此滿足Kharitonov所有參數多項式穩定則實際系統一定穩定,實際系統穩定只代表滿足參數變化域矩形對角線上方的所有參數系統穩定,并不代表所有矩形區域參數系統穩定,即式(15)中的4個Kharitonov多項式穩定只是系統魯棒穩定的充分條件。
2.2 盒子定理及關節電機魯棒PID控制分析
廣義Kharitonov定理又稱盒子定理,它在Kharitonov定理的基礎上提出了判定參數相關聯多項式魯棒穩定的充要條件,廣義Kharitonov定理引入了Kharitonov頂點對象和邊對象的概念。
1)巡檢機器人關節電機PID控制系統魯棒穩定必要條件的推導
Kharitonov頂點對象是由被控對象傳遞函數分子的4個Kharitonov多項式和分母的4個Kharitonov多項式的不同組合,共16個多項式的集合組成的。設被控對象的傳遞函數可表示為形如式(17)的分子分母多項式形式。

分子多項式 ()Ns的4個Kharitonov多項式記作

分母多項式 ()Ds的4個Kharitonov多項式記作

則 ()Gs的Kharitonov頂點對象可用式(18)來表示。

式(18)中 Ni(s)(i =1、2、3、4) 為

將式(18)、式(10)代入式(11),可得閉環系統Kharitonov頂點對象特征方程式為

則閉環系統Kharitonov頂點對象特征多項式為

則理論上閉環系統的16個Kharitonov頂點對象特征多項式可簡化為式(24)的4個多項式。

式(24)中的4個多項式都是確定系數的線性系統,可利用勞斯判據直接判定其穩定性求出參數的取值范圍。因為系統穩定的充要條件是對于所有對象(包括Kharitonov多項式、頂點對象、邊對象)系統都穩定,而頂點對象只是邊對象的一部分,所以頂點對象穩定是判定系統魯棒穩定的必要條件,系統魯棒穩定則式(24)中任何一個頂點多項式必穩定,或者說式(24)中任何一個頂點多項式不穩定,系統也不可能保持魯棒穩定。
2)巡檢機器人關節電機PID控制系統魯棒穩定充要條件的推導
Kharitonov邊對象是由被控對象傳遞函數分子、分母的線段多項式和Kharitonov多項式組合構成的多項式的集合。分子、分母的線段多項式是指分子、分母的 4個Kharitonov多項式的線性組合而構成的4個新的多項式,其構造方式如式(25)、式(26)所示,即

則 ()Gs的Kharitonov邊對象可用式(27)來描述。

所以閉環系統的Kharitonov邊對象特征方程為

所以閉環系統Kharitonov邊對象特征多項式為

若對于 G (s), Ni(s) = 1 (i=1 ,2,3,4),則 Ni*(s)=Ni(s)=1,閉環系統Kharitonov邊對象特征多項式可簡化為式(30)、式(31)兩式來描述,即

由式(30)可得系統的 4個Kharitonov邊對象特征多項式,即

對于被控對象 ()Gs,將式(23)代入式(26)可得 ()Gs分母的線段多項式為

將式(33)代入式(31)可得式(34)閉環系統的另外4個Kharitonov邊對象特征多項式,即

理論上的32個Kharitonov邊對象特征多項式經簡化后得式(32)、式(34)確定的8個多項式,其穩定性可由勞斯判據確定,它們穩定是系統魯棒穩定的充要條件。
3 巡檢機器人關節電機魯棒PID整定方法與流程
基于上述分析,對于一個已經確定的被控對象和已知的參數攝動范圍,可直接推導出關節電機控制系統PID控制器參數 pK、iK、dK的穩定域,用戶在控制過程中可以動態調節這些參數,以保證關節電機在擾動情況下穩定工作。理論上講求解穩定域直接利用勞斯判據對充要條件中的16個多項式分別列勞斯表,求取穩定性范圍,再取交集就可得到穩定域,但結合文中提出的判斷系統魯棒穩定的充分條件、必要條件、充要條件,PID整定流程按以下幾個步驟進行在一定程度上可進一步簡化求解流程。
1)建立被控對象的傳遞函數數學模型并確定模型中參數的攝動范圍,寫出閉環系統的Kharitonov多項式、Kharitonov頂點多項式、Kharitonov邊對象多項式。
2)利用常規方法整定PID控制器參數。
3)對式(15)的4個Kharitonov多項式進行穩定性判定,如果都穩定,則系統可保持魯棒穩定(充分條件);否則判定式(24)4個Kharitonov頂點多項式的穩定性,若式(24)中其中任何一個多項式不穩定,則系統也不可能穩定(必要條件),此時直接返回第(2)步重新整定PID參數;否則判定式(32)和式(34)兩式 8個Kharitonov邊對象多項式的穩定性,若8個多項式都穩定,則系統魯棒穩定,否則返回第(2)步重新整定PID參數。判斷流程如圖5所示。

圖5 巡檢機器人魯棒PID整定流程
4 應用舉例
以機器人關節電機魯棒PID閉環控制系統的特征多項式式(13)為算例任取一組參數及其攝動范圍并來說明算法的流程。假定P的標稱值為2.5,P在標稱參數的20%內攝動即 P+= 3 、P-= 2 ;假定Q的標稱值為3.5,Q在標稱參數15%內攝動即 Q+= 4、Q-= 3 ;假定M的標稱值為11.5,M在標稱參數的5%內攝動即 M+= 1 2,M-= 1 0;首先利用 Z-N整定法常規PID參數 Kp= 5 .5、 Ki= 4 0、 Kd=10;為判斷式(13)的穩定性,將上述參數代入式(15)得

由勞斯判據可知不滿足穩定充分條件,轉第二步將上述參數代入式(24)得

由勞斯判據可知不滿足穩定必要條件,說明上述初始給定PID參數無法保證系統魯棒穩定,很顯然不滿足充分條件和必要條件都是由于參數iK設置過大導致的,此時需重新整定獲取新的PID參數,然后重復上述流程,直到系統穩定為止。上述過程可以在計算機上實現,魯棒PID控制參數會根據巡檢機器人所受擾動情況實時動態調整,以保證機械臂快速、準確、穩定的跟蹤到給定值。
5 仿真實驗與結果分析
利用常規PID控制器和本文魯棒PID控制器分別對機器人關節直流電機實施控制,本文機器人關節電機選用的是Maxon無刷直流電機,其相關參數見表1。

表1 Maxon無刷直流電機參數表
由表1經計算得電機模型的標稱值為P=1.15×10-5,Q=0.316,M=1.14×10-5當 P、Q、M 分別在150%、100%、60%和50%、30%、10%的范圍內攝動做分別兩組仿真實驗,結果分別如圖6、圖7、圖8、圖9所示,其中第一組圖6和圖7為不同參數攝動下常規PID控制階躍響應曲線,第二組圖8和圖9為不同參數攝動下魯棒PID控制階躍響應曲線。為了更加清楚的識別曲線之間的差別,圖 7和圖 9分別用Δ、*、·、+四種符號分別表示模型參數攝動 50%、30%、10%和標稱模型的階躍響應曲線。為進一步驗證基于Kharitonov理論的魯棒 PID控制效果的優越性,將其與基于H∞理論的魯棒PID的控制效果進行對比,做第三組仿真實驗,取定關節電機參數攝動為 50%和 100%,仿真結果分別如圖10、圖11所示。

圖6 參數攝動為150%、100%、60%時常規PID控制階躍響應曲線

圖7 參數攝動為50%、30%、10%時常規PID控制階躍響應曲線
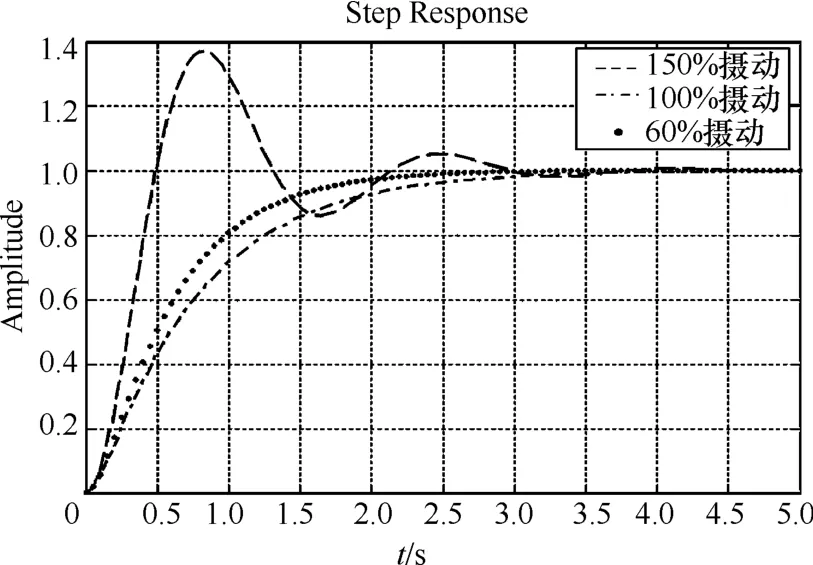
圖8 參數攝動為150%、100%、60%時魯棒PID控制階躍響應曲線

圖9 參數攝動為50%、30%、10%時魯棒PID控制階躍響應曲線

圖10 參數攝動為50%時H∞魯棒PID和Khatitonov PID控制階躍響應曲線

圖11 參數攝動為100%時H∞魯棒PID和Khatitonov PID控制階躍響應曲線
由第一組仿真結果圖 6、圖 7可知,對于標稱模型即參數無攝動的情況下采用常規PID控制可以獲得較好的控制效果,如圖7“+”曲線所示。隨著模型參數攝動由10%~150%的逐步增大,曲線的收斂速度越來越慢,超調量增大,震蕩加劇,當參數攝動在 150%時曲線已進入等幅震蕩模式,無法收斂。由此可知,常規PID控制在參數不確定系統中,特別是參數攝動范圍增大的情況下控制效果變得越來越差,無法保證控制系統的魯棒性能。
由第二組仿真結果圖8、圖9可知,隨著模型參數攝動由10%~150%的逐步增大,曲線的收斂速度會變慢,可能會有小幅震蕩產生,但最終都還是可以收斂到穩定狀態。當模型參數攝動由 10%~50%時,最遲約3s后可保證系統收斂;當模型參數攝動由60%~150%時,最遲約4.5s后可保證系統收斂,由此可知,魯棒PID相對傳統PID在參數不確定系統控制中具有明顯優勢,雖然與常規PID一樣參數攝動范圍增大的情況下收斂速度會有所變慢,但最終還是完全可以保證收斂,這是魯棒PID和常規PID控制效果的本質區別。魯棒PID能夠較好地適應模型參數的不確定性對系統控制效果的影響。
由第三組仿真結果圖 10、圖 11可知,在不同參數攝動范圍內H∞魯棒PID和Khatitonov PID控制都能夠使得系統穩定收斂,但Khatitonov PID控制效果要明顯優于H∞魯棒PID控制效果,主要表現在Khatitonov PID控制上升時間更短,收斂速度更快,Khatitonov理論相對于H∞理論更適宜于處理參數不確定系統的穩定性問題。為更清晰地比較不同參數攝動下,不同方法對機器人關節電機控制性能的影響,結合上述3組仿真結果列出不同方法機器人關節電機性能比較見表2。

表2 不同方法機器人關節電機控制性能(收斂時間)比較
此外,對比第一組和第二組仿真結果,圖6和圖 8為參數攝動為 60%~150%時常規 PID和魯棒PID的控制效果,常規PID出參數攝動150%震蕩外,其他幾條曲線要在約 20s后才能全部收斂到穩定狀態,收斂速度慢,而魯棒PID曲線在4.5s后即可全部收斂到穩定狀態。圖7和圖9為參數攝動為10%~50%時常規PID和魯棒PID的控制效果,常規PID曲線要在約 12s后才能全部收斂到穩定狀態,而魯棒PID曲線在2.5s后即可全部收斂到穩定狀態。由此可見魯棒PID收斂速度大幅提高,增強了控制的實時性。綜合上述分析可知基于Khatitonov理論的魯棒 PID對于參數不確定系統具有較好的控制效果,能夠滿足控制系統快速、準確、穩定的設計要求,這對巡檢機器人關節電機實施魯棒PID控制為機器人的正常工作提供了強有力的保證。
6 結論
本文在建立巡檢機器人關節電機PID控制系統模型的基礎上,利用Kharitonov定理對該模型進行了魯棒穩定理論分析,利用Matlab仿真實驗驗證了本文理論分析的正確性。值得進一步深入思考的是,本文被控對象分子為常數簡化了計算量,在實際中可能會遇到理論上最多52個(充分條件4個+必要條件16個+充要條件32個)線性多項式的穩定性判斷,計算量巨大,如何尋找簡單易行的方法來處理這些多項式對提高算法的效率具有很大的實際意義。此外,電機參數的攝動范圍如何精確標定以及如何在保證機器人穩定運行的基礎上,使各關節電機協調工作能耗更少,性能更優,將是后續研究的重要內容。
[1] 張運楚, 梁自澤, 譚民. 架空輸電線路巡檢機器人的研究綜述[J]. 機器人, 2004, 26(5): 467-473.
[2] 張文輝, 齊乃明, 尹洪亮. 基于滑模變結構的空間機器人神經網絡跟蹤控制[J]. 控制理論與應用,2011(9): 1141-1144.
[3] 高健, 黃心漢, 彭剛, 等. 移動機器人PID運動控制器參數的模糊自整定[J]. 華中科技大學學報(自然科學版), 2004, 10(S1): 48-51.
[4] 王洪斌, 李鐵龍, 郭繼麗, 等. 機器人的神經網絡魯棒軌跡跟蹤控制[J]. 電機與控制學報, 2005, 9(2):145-147.
[5] 李琳, 任俊霖, 鄒焱飚, 等. 基于免疫遺傳算法的移動機器人軌跡跟蹤[J]. 華南理工大學學報(自然科學版), 2013, 41(7): 13-18.
[6] Tsocano R. Robust synthesis of a PID controller by uncertain multimodel information sciences, 2007,117(6): 1441-1415.
[7] Huang Y J, Wang Y J. Robust PID tuning strategy for uncertain plants based on the Kharitonov theory[J].ISATransactions, 2000, 39: 419-431.
[8] 彭瑞, 岳繼光. 基于區間分析的參數不確定系統PID魯棒控制器設計[J]. 電機與控制學報, 2006, 10(4):411-414.
[9] 徐峰, 李東海, 薛亞麗, 等. 基于區間多項式穩定性理論的 PID控制器[J]. 清華大學學報(自然科學版),2003, 43(12): 1642-1645.
[10] Ho M T. Synthesis of H∞PID Controllers: AParametric Approach. Automatica, 2003, 39: 1069-1075.
[11] 呂永健, 解亮, 王海波. 基于 H∞控制的無刷直流電機魯棒控制器[J]. 微電機, 2011, 44(1): 55-57.
[12] 恒慶海, 魯婧, 李麗. 無刷直流電機H∞魯棒PI控制[J]. 中南大學學報(自然科學版), 2013, 44(S1): 87-91.
[13] Wang Peng, Liu Feng, Mei Shengwei, et al.transmission lines inspection robot[A]. Proceedings of the 29th Chinese Control Conference July 29-31, 2010,Beijing, China, 2010.
[14] 王鵬, 劉鋒, 梅生偉, 等. 高壓輸電線巡線機器人控制體系構建及動作控制器設計[J]. 清華大學學報(自然科學版), 2011, 51(7): 921-927.
[15] 趙浩泉, 封錫盛, 劉開周. 基于混合靈敏度的水下機器人魯棒控制研究[J]. 儀器儀表學報, 2007, 28(8):606-609.
[16] Liu Kaizhou, Guo Wei, Wang Xiaohui, et al. Research on the Structure Singular Value Robust Control of Underwater Vehicle[A]. Proceedings of the 8th World Congress on Intelligent Control and Automation, July 6-9 2010, Ji’nan, China.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
