基于共享相位的現代有軌電車信號優先控制仿真
2018-04-23 12:51:37豐格李楓
交通科技 2018年2期
豐 格 李 楓
(同濟大學交通運輸工程學院 上海 201804)
現代有軌電車既滿足大城市對多層次公交體系的需求,又為中小城市軌道交通的發展提供了更經濟、更合適的途徑,以一種環境友好、經濟可行的方式緩解城市交通壓力。截至2016年底,我國開通運營現代有軌電車線路的城市增加至11個,共計17條線,全長235.6km[1],有軌電車迎來快速發展時期。
Lee[2]通過模擬不同優先級的有軌電車優先運行場景,發現信號優先算法可有效減少交叉口的延誤。目前我國對有軌電車平交口的信號優先控制研究和實踐多集中于單條線路,且缺乏定量化的研究。在有軌電車發車密度不大的情況下,交叉口整體的通行效率不佳。有軌電車成網條件下與社會車輛在交叉口的交織更為復雜,通過探究合適的優先控制方案以提升交叉口的通行效率與安全性顯得十分重要。
1 有軌電車優先信號控制
本文采用的主動優先可分為相對信號優先與絕對信號優先。相對信號優先是指當電車到達交叉口前,交通信號優先系統經過判斷,采取綠燈延長、紅燈早斷等策略來減少有軌電車延誤;絕對信號優先是指有軌電車到達交叉口時,信號即給予綠燈,直接通行[3]。
1.1 VisVAP感應控制模塊
控制邏輯程序由VisVAP(vissim vehicle actuated programming)編譯而成,并與CROSSIG計算而來的相位過渡文件一起加載到VISSIM中進行優先控制與相位轉換[4]。感應控制仿真文件結構見圖1。
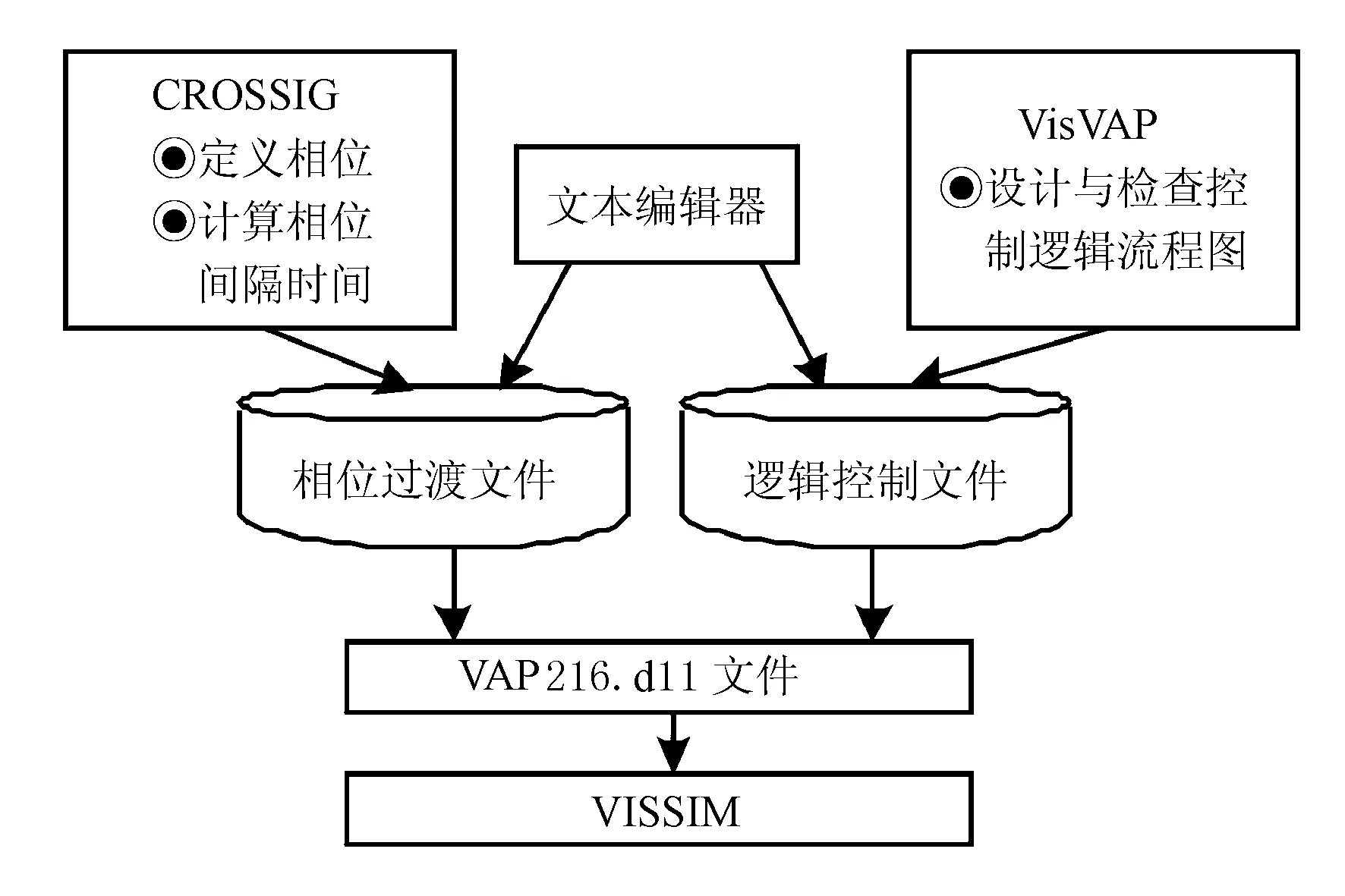
圖1 感應控制文件結構圖
1.2 信號檢測設備布局
進口道檢測器的設置位置需兼顧安全與停車效率,計算見式(1)[5]。出口道的檢測器設置需考慮列車長度,及時檢測電車是否出清交叉口。
(1)
式中:Ld為檢測器距停車線的距離,m;Sb為有軌電車制動距離(約60m);vd為有軌電車通過檢測器時的速度,km/h;tp為最小相位時間,s;a為制動加速度,m/s2。
本文進口道檢測器距離停車線100 m,出口道檢測器距交叉口40 m,布設見圖2。
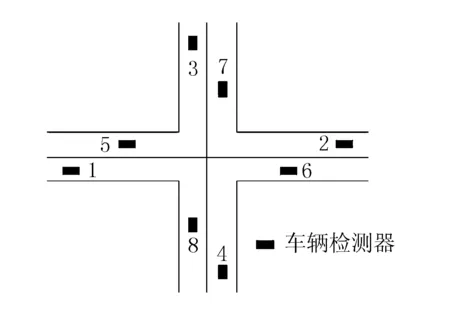
圖2 有軌電車檢測設備布置示意
1.3 仿真控制參數
1) 最小綠燈時間。初期綠燈時間是指不管本相位是否檢測到有車輛到達,都必須滿足的綠燈時間。滿足2個條件:①使停在檢測器內的車輛全部出清停車線;②滿足行人過街的最小時間[6]。計算如式(2)。
Gmin=max{t1,t2}
(2)
式中:Gmin為最小綠燈時間,s;t1為檢測器與停車線之間有軌電車出清時間,s;t2為行人過街最短時間,s。
2) 綠燈極限延長時間。平衡與控制感應信號中各相位的綠燈時間,若當前某相位達到綠燈極限延長時間,則強制轉換至下一相位。綠燈極限延長時間一般為40~60 s[7]。
3) 綠燈間隔時間。需確保通過停車線的有軌電車均能在下一相位的首車到達之前安全出清交叉口,計算如式(3)[8]。
(3)
式中:I為綠燈間隔時間,s;t為駕駛員反應時間,s;v為有軌電車接近路口速度,40 km/h;W為交叉口寬度,m;L為有軌電車長度,m。
2 交叉口有軌電車仿真建模
2.1 交叉口形式
以上海某道路交叉口為例(見圖3),4個路口均為雙向8車道,設置左轉、右轉專用道,車道寬度為3.75 m,高峰小時各進口道車流見表1。有軌電車線路沿路中敷設,采用半獨立路權,呈十字交叉形式,車輛長度為40 m。有軌電車區間平均運行速度50 km/h,交叉口限速25 km/h,平均加速度分別為1.0,-1.1 m/s2,半專用路權高峰小時列車發車密度不應小于20對/h[9]。為簡化仿真,本文不考慮交叉口前后設置車站的情況。
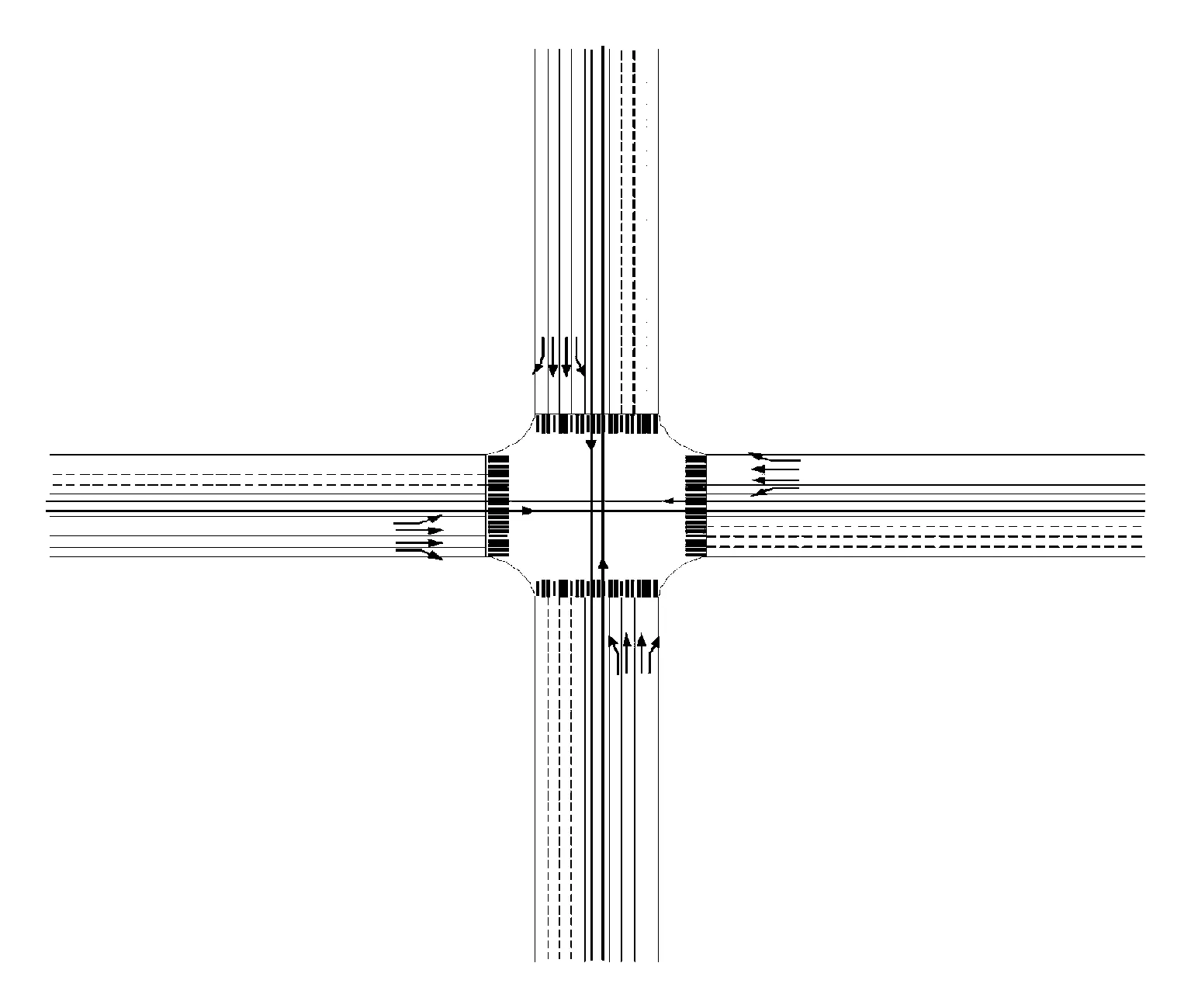
圖3 交叉口布局

車流轉向各進口道車輛數/veh東進口西進口南進口北進口直行568700511632左轉13815498137右轉259234177166合計9651088786935
2.2 共享相位設置方案
對于十字形交叉線路來說,不設有軌電車專用相位,在各進口直行方向采用社會車輛共享相位,各進口道有軌電車放行時,同相位的社會車輛亦可通行,可大大減少因相位頻繁轉換帶來的交叉口社會車輛通行效率的降低。相位1為東西向有軌電車與社會車輛直行,相位2為東西向社會車輛左轉,相位3為南北向社會車輛與有軌電車直行,相位4為南北向社會車輛左轉,交叉相位見圖4。
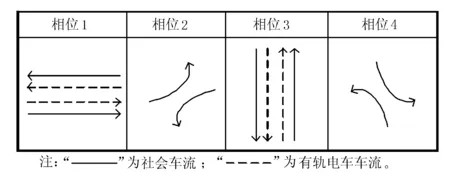
圖4 交叉口相位圖
將定時信號參數輸入Synchro系統中,可得定時信號配時:相位1時長38 s;相位2時長18 s;相位3時長35 s;相位4時長17 s。
2.3 相對優先信號控制
相對優先信號控制設計原理:當檢測到有軌電車接近交叉口時,首先判斷當前相位是否為有軌電車同向相位,再比較電車抵達交叉口的時間與當前相位最小、最大綠燈時間的關系,最后執行紅燈早斷、綠燈延長或插入相位等策略實現有軌電車信號優先,控制邏輯見圖5。
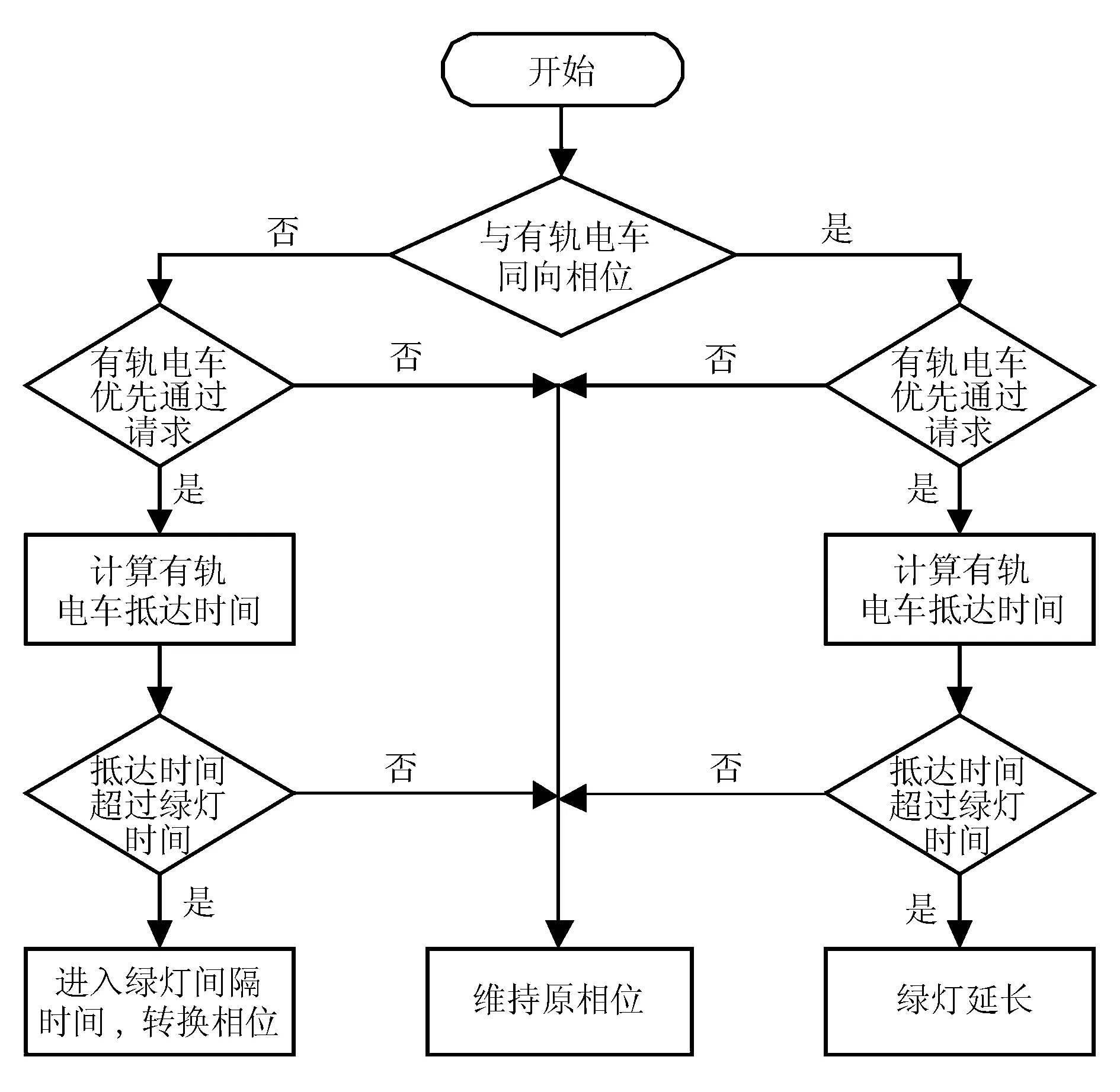
圖5 相對信號優先邏輯控制圖
具體邏輯控制程序在VisVAP中實現如下。
當相位1處于當前相位,檢測器1或2檢測到有軌電車,且當前相位剩余綠燈時間不能滿足有軌電車從檢測器抵達交叉口,則進行綠燈延長,檢測器5和6均檢測到有軌電車后即可結束相位1;當檢測器3或者4檢測到有軌電車,且相位1滿足最小綠燈時間,則從當前相位切換至相位3,直至檢測器7和8均檢測到有軌電車即可結束相位3。
當相位2處于當前相位,檢測器1或2檢測到有軌電車,且當前相位滿足最小綠燈時間,則從當前相位切換至相位1;同理當檢測器3或4檢測到有軌電車,且滿足最小綠燈時間,則從當前相位切換至相位3。
相位3或4處于當前相位時的相位切換邏輯可以此類推。
2.4 絕對優先信號控制
絕對優先信號控制設計原理:有軌電車的優先控制不需要考慮社會車輛的通行效益,無需停車即可通過交叉口,當有軌電車到達交叉口時,信號控制機通過本相位綠燈時間延長和轉換相位等保證電車優先,控制邏輯見圖6。
具體邏輯控制程序在VisVAP中實現如下。
當相位1處于當前相位,檢測器1或2檢測到有軌電車,且當前相位的剩余綠燈時間不能滿足有軌電車從檢測器抵達停車線,則執行綠燈延長,直到檢測器5和6均檢測到有軌電車時則結束相位1,若剩余綠燈時間能滿足電車從檢測器抵達停車線,則維持原相位;檢測器3或4檢測到有軌電車,則進入綠燈間隔時間,將相位1切換至相位3。

圖6 絕對信號優先邏輯控制圖
當相位2處于當前相位,檢測器1或2檢測到有軌電車,則進入綠燈間隔時間,將相位2切換至相位3;檢測器3或4檢測到有軌電車,若有軌電車抵達停車線的時間大于當前相位綠燈時間,則維持原相位,否則,則進入綠燈間隔時間,將相位2切換至相位3。
相位3或4處于當前相位時的相位切換邏輯可以此類推。
3 VISSIM仿真結果分析
將路網模型、路段流量以及優先邏輯控制文件加載到VISSIM中進行仿真。仿真時間取第600~3 600 s,選取不同的隨機種子數進行5次仿真,結果取平均值,仿真效果見圖7。
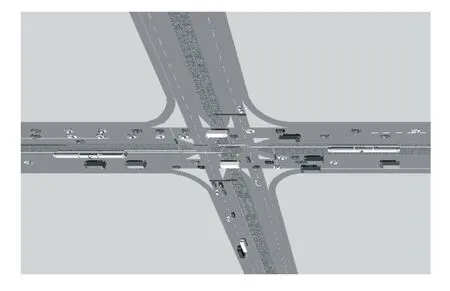
圖7 仿真效果圖
3.1 社會車輛影響評價
在VISSIM中設置評價節點,運行仿真得到3種不同信號控制下各進口道社會車輛的排隊長度和平均延誤情況,見表2。
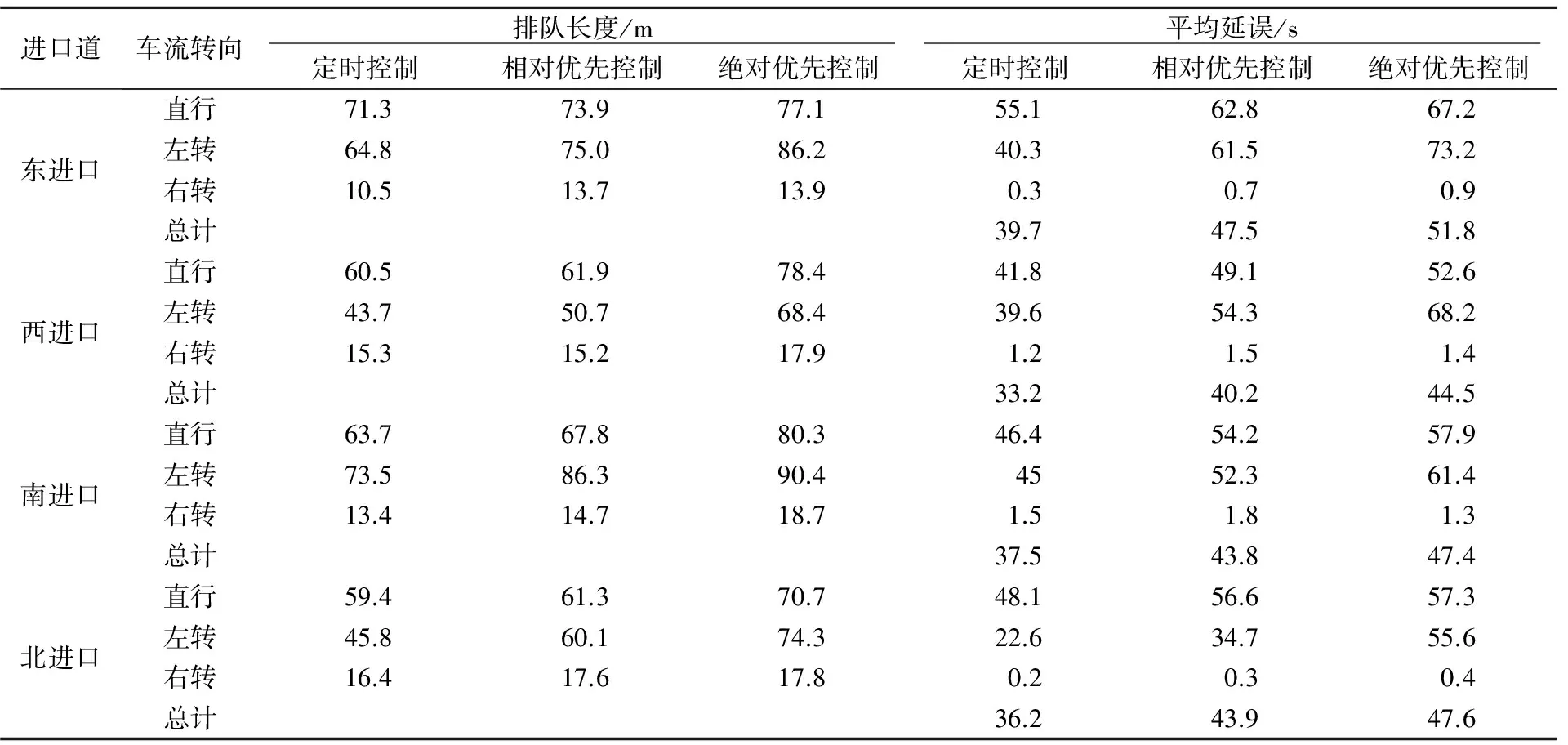
表2 各進口道社會車輛排隊長度與平均延誤
以上結果表明,不同信號控制對社會車輛在交叉口的排隊長度及平均延誤的影響程度各不相同。
1) 由表2可見,與定時信號控制相比,相對優先信號控制由于有軌電車與社會車輛采用共享相位,有軌電車優先通行時,同相位社會車輛亦可通行,所以直行相位社會車輛的排隊長度增加程度并不明顯,左轉相位車輛排隊長度影響較大。而絕對優先情況下社會車輛各進口道的車輛排隊均出現較大程度的增長,特別是左轉相位車輛。
2) 對于平均延誤來說,相對信號優先以及絕對信號優先條件下各進口道的直行車輛的延誤增加不明顯,左轉相位車輛延誤影響較大。
3.2 有軌電車影響評價
設置有軌電車發車間隔為3 min,運行不同信號控制下仿真模型,得到表3所示的評價結果。
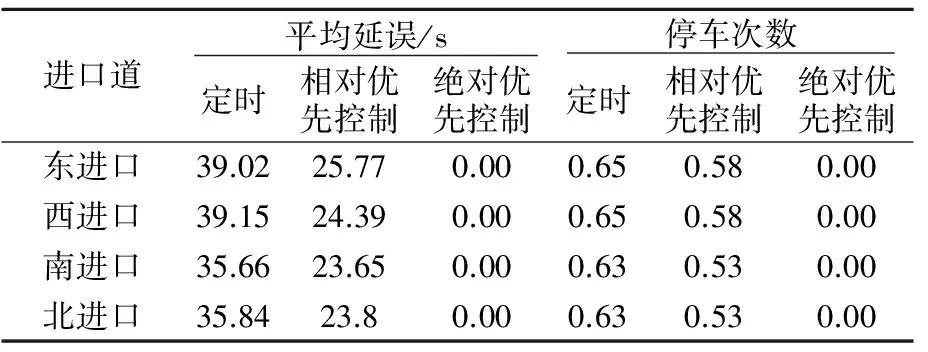
表3 各進口道有軌電車平均延誤和停車次數
由表3可見,相對信號優先控制下的有軌電車從排隊長度、延誤時間及停車次數均有明顯降低,而絕對優先信號控制由于可使有軌電車不停車通過交叉口,不存在排隊長度、延誤及停車次數。
4 結語
本文通過建立3種不同信號控制的交叉口仿真模型,得到社會車輛與有軌電車的車輛延誤時間、排隊長度及停車次數等指標。結果表明,在相交道路流量差別不大且左轉流量較小的交叉口,采用基于共享相位的相對信號優先能較好保證有軌電車的通行效率,且能降低對交叉口社會車輛的影響程度。在本文的基礎上,進一步考慮有軌電車車站的設置、運行延誤等對通行效率的影響,是未來交叉口信號優先控制研究的方向。
[1] 龐瑾,顧保南.2016年中國城市軌道交通運營線路統計和分析:中國城市軌道交通“年報快遞”之四[J].城市軌道交通研究,2017(1):1-5.
[2] LEE J. Microsimulation modeling and advancements of transit priority options at major arterials[J].Simulation,2001,24(3):38-42.
[3] 章瑀,陳榮武,王堅強.基于VISSIM的有軌電車交叉口信號控制策略研究[J].大連交通大學學報,2017,38(2):112-116.
[4] KARLSRUHE. VISSIM user manual-version 4.30[M].Germany:PTV Planung Transport Verkehr AG,2007.
[5] 楊海霞.現代有軌電車信號優先協調控制實踐[J].地下工程與隧道,2017(1):49-53.
[6] 吳兵,李曄.交通管理與控制[M].4版.北京:人民交通出版社,2009.
[7] 崔梁,鄧君.現代有軌電車不同等級交叉口優先配時方案研究[J].物流科技,2017,40(5):79-83.
[8] 劉立龍.有軌電車信號系統平交路口信號燈控制策略研究[D].蘭州:蘭州交通大學,2015.
[9] 王灝.現代有軌電車系統研究與實踐[M].北京:中國建筑工業出版社,2011.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25