基于TMS320F28335的三相感應電機矢量控制系統的研究
2018-04-23 09:13:20杜慶楠
軟件 2018年3期
關鍵詞:系統
李 拓,杜慶楠
(河南理工大學電氣工程與自動化學院,河南 焦作 454000)
0 引言
世界上第一臺交流電動機自1885年問世以來,在長達80多年的時間里,但凡是要求調速范圍廣、速度控制精度高和動態響應性能好的場合,幾乎都采用直流電動機調速系統,而交流電動機僅僅被應用在一些不需要調速的拖動場合。主要原因是因為交流電動機是一個多變量、高階、非線性、強耦合的復雜系統,其在調速性能、調速范圍、起制動特性、過載能力方面無法與直流電動機相比擬。直到20世紀 70年代,隨著電力電子技術、大規模集成電路和計算機控制技術的快速發展,以及變頻技術、矢量控制等技術的出現和應用[1],使得交流調速性能有了突破性進展。而直流電動機自身在換向問題上的固有缺點又無法很好的得以解決,因此對高性能的交流調速系統的研究變得尤為重要,本文所研究的是一個完整的基于TMS320F28335的三相感應電機矢量控制系統[2],運用電流模型進行磁鏈觀測,最終使電機的運行得到了高效的控制。
1 系統整體結構
整個系統以TMS320F28335DSP為核心,整個系統框架包括采樣模塊、ADC模塊、CLARK變換模塊、PARK變換模塊、PID模塊、I-PARK變換模塊、SVPWM 模塊、CUR-MOD模塊以及光電編碼器。TMS320C2000系列 DSP集微控制器和高性能DSP的特點于一身,具有強大的控制和信號處理能力[3],能夠實現復雜的控制算法,片上整合了Flash存儲器、快速的A/D轉換器、增強的CAN模塊、事件管理器、正交編碼電路接口及多通道緩沖串口等外設,此種整合使用用戶能夠以很便宜的價格開發高性能數字控制系統。F283X系列的DSP更是在原來F28系列定點DSP的基礎上增加了浮點運算內核[4],保持原有DSP芯片優點的同時,能夠更高效地執行復雜的浮點運算,在處理速度、處理精度方面要求較高的領域,比原F28系列DSP有著更高的性價比。功率部件采用三菱公司的 IPM 模塊PM15RSH120,整體結構采用類似變頻器結構,所有功率電路和檢測部件封裝在機殼內部[5],使系統的安全性和可靠性更高[6]。監控部分也安裝在機殼內部,可以控制電源通斷。人機接口采用液晶顯示屏和薄膜開關按鍵,操作界面更友好,觀察信息更方便,和磁粉制動器以及其他輔助控制功能由一個單片機進行控制,不占用DSP的處理時間[7],液晶采用320X240的點陣式液晶顯示模塊,能顯示電機運行的狀態曲線。主電源采用單相交流 220V不控整流電源。整體功能結構框圖如圖1所示。
2 矢量控制的工作原理
由電機學可知,任何電動機產生電磁轉矩的原理,在本質上都是電動機內部兩個磁場相互作用的結果[8],因此各種電動機的電磁轉矩具有統一的表達式,即:

式中, np為電機的極對數; Fs、 Fr為定、轉子磁動勢矢量的模值;Φm為氣隙主磁通矢量的模值;θs、θr為定子磁勢空間矢量FS、轉子磁動勢空間矢量 Fr分別與氣隙合成磁勢空間矢量 Fh之間的夾角[9](見圖二所示),通常用電角度表示為θs=npθms,θr=npθmr,其中θms、θmr為機械角;Fh為氣隙合成磁勢空間矢量,當忽略鐵損時與磁通矢量Φm同軸同向。
由公式(1)及圖2 所示的感應電動機磁動勢、磁通空間矢量圖可以看出,通過控制定子磁動勢 FS的模值或控制轉子磁動勢 Fr的模值及它們在空間的位置,就能達到控制電動機轉矩的目的。要想控制 FS或 Fr模值的大小,可以通過控制各相電流的幅值大小來實現,而在空間上的位置角θs、θr,可以通過控制各相電流的瞬時相位來實現。因此,只要能實現對感應電動機定子各相電流(iA、iB、iC)的瞬時控制,就能實現對感應電動機轉矩的有效控制。我們可以通過某種等效變換將交流電動機與直流電動機的控制統一起來,從而對交流電動機的控制就可以按照直流電動機轉矩、轉速規律來實現,這就是矢量控制的工作原理。

圖1 整體功能結構框圖Fig.1 Overall functional block diagram

圖2 感應電動機的磁動勢、磁通空間矢量圖Fig.2 Induction motor magnetic to motive force, magnetic flux vector space
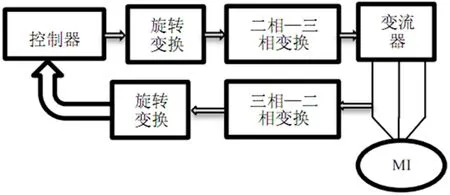
圖3 矢量控制過程框圖Fig.3 Vector control process diagram
3 系統設計與實現
3.1 硬件設計
該系統主要實現如下模塊功能:采樣模塊、ADC模塊、CLARK變換模塊、PARK變換模塊、PID模塊、I-PARK變換模塊[10]、SVPWM 模塊、CUR-MOD模塊以及光電編碼器。系統硬件結構圖如下圖4所示。
①、主電源
主電源位于驅動器內部,為+300V單相不控整流電源[11],帶有熔斷器。主電源單元是為逆變器提供直流功率電源。
②、鍵盤控制及顯示
此設備為實驗系統的操作和監控部件[12],由一個單片機控制板實現。包含1個320*240的LCD點陣顯示屏和10個按鍵的鍵盤;通過此人機界面可以實現電機轉速、負載設定及顯示、速度數字或曲線顯示、主電源的選擇及開關控制[13],通過SPI接口與DSPCPU進行數據交換。
③、功率器件
功率單元采用內部帶有驅動和保護功能的 IPM模塊。選用產品型號為 PM15RSH120,容量為 15安1200伏。
④、驅動電源
驅動電源采用 4路高隔離耐壓的+15V隔離DC-DC模塊,分別為功率模塊的驅動電路供電。
⑤、脈沖隔離單元
為確保控制電路安全,本系統采用光電耦合器[14],將控制電路與主電路光電隔離。
⑥、脈沖電壓保護單元
為了降低 IGBT管關閉瞬間造成的高脈沖電壓對電路的影響,在功率模塊的輸入端使用了高壓脈沖吸收電路。
⑦、檢測單元
檢測單元提供了兩路光電隔離電流檢測,隔離檢測逆變器輸出的 A、B兩相電流。并將監測到的信號調理成峰-峰值在 0~3.3伏之間的信號,送給DSP的ADC輸入端。
⑧、接口單元
前面板為本系統驅動器功率部分到DSPCPU組合板提供電路接口和電平匹配,包括 J1、J2、J3、J7、J8以及J9六個接口單元;后面板為電動機接口J4、磁粉制動器接口J5、異步電機風扇接口J6、三芯電源插座和開關。接口定義見表1,表2所示。

圖4 硬件結構框圖Fig.4 Hardw are block diagram

表1 接口定義Tab.1 I nterface definition

表2 接口定義Tab.2 I nterface definition
本系統所用的仿真器為USB接口的TDS510型。
⑩、中小功率機組介紹
本系統機組包括三相感應電機、1000線增量式旋轉光電編碼器,機組通過彈性聯軸器使各部件組合,構成該系統需要的電機組,選配非常靈活方便。數控負載由一個磁粉制動器和一個配套的恒流源控制器組成,制動器連接到機組中,通過電纜與恒流源控制器相連。恒流源控制器集成在驅動器中[15],輸出值大小通過鍵盤設置。
3.2 軟件設計
程序流程圖如圖5所示。
子程序列表如表3所示。
部分程序如圖6所示。
3.3 算法設計
矢量控制式如公式(2)所示:

式中 Tei為電磁轉矩、 CIM=npLmd/Lrd為轉矩系數、Ψr為轉子磁鏈、iST為轉矩電流、Lmd為互為轉子時間常數、p為極對數、為勵磁電流、 Lrd為轉子電感、 Ws1為轉差角頻率。該式表明在同步旋轉坐標系上,如果按照異步電動機轉子磁鏈定向,且保持勵磁電流不變那么轉子磁鏈就不變,此時電磁轉矩僅僅與轉矩電流相關。此時異步電動機的電磁轉矩模型就與直流電動機的電磁轉矩模型完全一樣了。

圖5 程序流程圖Fig.5 Pr ogram flow chart

表3 子程序列表Tab.3 Subr outine list

圖6 部分程序Fig.6 Part of the program
CLARK變換公式如式(3)所示:

式中αsi為兩相靜止坐標系中α軸的電流、βsi為兩相靜止坐標系中β軸的電流、Ai為采樣的A相電流、Bi為采樣的B相電流。通過此式可將采樣的三相靜止坐標系的電流轉換成兩相靜止坐標系的電流。
PARK變換公式如式(4)所示:

式中αri、βri為兩相靜止坐標系,rdi、rqi為兩相旋轉坐標系,rθ為磁通角度。通過此式便可以將兩相靜止坐標系轉換成兩相旋轉坐標系。
I-PARK變換公式如式(5)所示:

式中αri、βri為兩相靜止坐標系,rdi、rqi為兩相旋轉坐標系,rθ為磁通角度。通過此式便可以將兩相旋轉坐標系轉換成兩相靜止坐標系。
4 系統測試結果
在實驗過程中,經過不斷的對影響矢量控制系統控制性能參數的修改,來驗證感應電機動態過程中個因素對其控制性能的影響。得到的實驗結果如下圖所示。
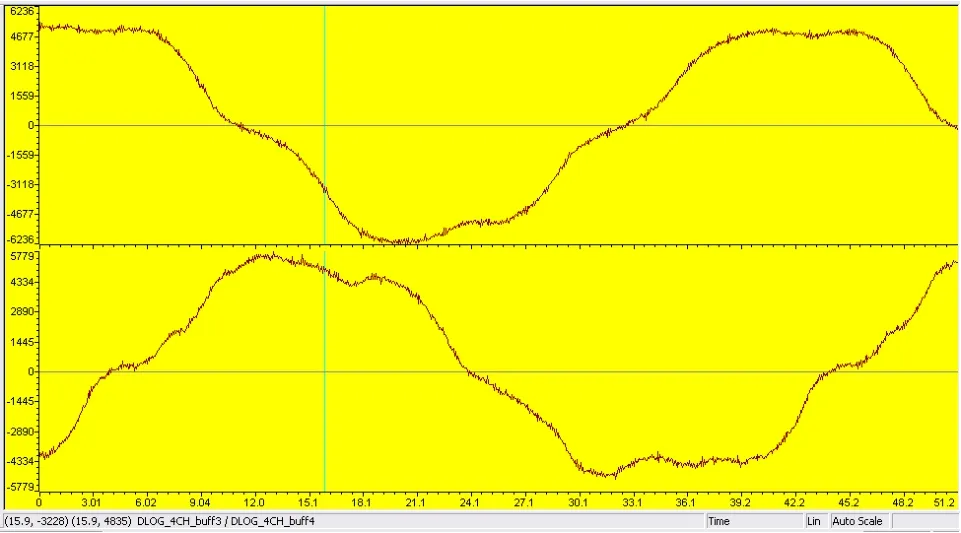
圖7 兩相采樣電流iA、iBFig.7 T wo-phase sampling current iA、iB

圖8 解耦后的轉矩電流與勵磁電流iq、idFig.8 Decoupled torque current and excitation current

圖9 給定磁鏈與測量磁鏈之間的對比Fig.9 Shows the comparison between flux and flux measurement

圖10 顯示器上的速度曲線Fig.10 Shows the speed curve on the display
經分析,該系統通過一系列的矢量變換將采樣的三相靜止坐標系下的電流變換成兩相旋轉坐標系下的電流,較好的實現了定子電流的完全解耦。并通過電流模型法觀測磁鏈,從而能夠精準的進行磁場定向。并通過光電編碼器實時估計轉速信息與給定速度構成閉環反饋。在實驗過程中發現磁鏈的周期計算結果隨電機速度快慢變化而變化,當還沒有實現沿轉子磁場定向時隨電機方向不同而呈現正向磁鏈和反向磁鏈,此時勵磁電流會出現為負的現象,不過這一點并不會影響電流模型磁鏈的計算。該系統使得感應電機的轉速與轉矩電流之間幾乎成線性關系,其控制性能完全可以與直流電機相媲美。
[1] 胡蝶, 趙璞, 陳明爽, 等. 多源空間矢量數據一致性處理技術探討[J]. 軟件, 2016, 37(4): 13-17
[2] 石俊杰, 童名文. 內容適配系統控制模型研究[J]. 軟件,2013, 34(5): 53-55
[3] 鄧月.X 光信號采集模塊的設計與實現[J]. 軟件, 2013,34(8): 88-91
[4] 董慶洲, 徐明偉, 楊芫.身份/ 位置分離映射表在Linux 內核中的實現[J].新型工業化, 2012, 2(2): 46-51.
[5] 林博, 徐明偉, 李琦.基于背景流量的故障檢測研究[J].新型工業化, 2012, 2(2): 1-7.
[6] 耿志強, 楊科, 韓永明.基于數據驅動有向圖和高階統計的控制系統故障檢測方法[J].新型工業化, 2013, 3(11): 1-11
[7] 何永勃, 夏文卿, 董玉珊.基于模糊自適應算法的異步電機矢量控制系統[J].中國民航大學學報, 2017, 35(01): 47-51.
[8] 陳華玉. 感應電機矢量控制系統的參數辨識研究[D].天津理工大學, 2017
[9] Wang Lei, Xiao Yun-shi} Wu Qi-di, Zhou Guo-xing.Neural ]network based parameter identification and adaptive speed control of ac drive system [C]. Proceedings of the IEEE International Conference on Industrial Technology 1996: 118-121.
[10] Kung Y S, Liaw C M, Ouyang M S. Adaptive speed control for induction motor drives using neural networks[J]. IEEE Transactions on Industrial Electronics, 1995, 42 (1): 25-32.
[11] Orlowska-Kowalska T, Kowalski C T. Neural network application for flux and speed estimation in the sensorless induction motor drive[C]. Proceedings of the IEEE International Symposium on Industrial Electronics, 1997(3): 1253-1258.
[12] Toh A K P, Nowicki E P, Ashrafzadeh F. Flux estimator for field oriented control of an induction motor using an artificial neural network[C]. Conference Record of the 1994 IEEE IndustryApplications SocietyAnnual Meeting, 1994(1): 585-592.
[13] Elloumi M} Ben-Brahim L} A1-Hamadi M A. Survey of speed sensorless controls for IMdrives[C]. Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics-Society. 1998(2): 1018-1023.
[14] Ohtani T, Takada N, Tanaka K .Vector control of induction motor without shaftencoder[J]. IEEE transactions on IndustryApplications} 1992 28 (1): 157-164.
[15] Tsuji M Shuo Chen Izumi K. Ohta T. et al. A speed sensorless induction motor vector control system using q-axis flux with parameter identification[C]. Proceedings of the 23rdInternational Conference on Industrial Electronics Control and Instrumentation 1997(2): 960-965.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
