水稻缽苗膜上移栽機構優化設計與試驗
2018-04-19 00:36:50劉志平周脈樂
農業機械學報 2018年4期
劉志平 辛 亮 周脈樂 王 杰
(東北農業大學工程學院, 哈爾濱 150030)
0 引言
水稻覆膜栽培技術具有提高地表溫度,增加有效積溫,減輕雜草和病蟲害,增加有效穗數和有效防止水土流失等優點[1-4]。該項技術可以將有機水稻的種植趨于理想化,即解決了在不使用化學除草劑情況下種植有機水稻除草的難題[5]。水稻缽苗移栽技術,較傳統插秧方式相比,具有不傷根、無緩苗期等優點,可以使秧苗低節位分蘗,增加有效分蘗,平均增產10%~20%[6-8]。綜上所述,水稻缽苗移栽和覆膜栽植技術均是水稻種植的發展趨勢,水稻缽苗膜上移栽將兩種農藝結合,可以實現二者優勢的疊加,達到有機水稻的優質高產,大幅度提高有機水稻種植的經濟和生態效益。
目前,對于全自動水稻膜上移栽裝備的研究較少,所見報道大多為單獨進行覆膜、打孔、插秧的裝備,同時也出現了水稻覆膜插秧一體機。日本的永田雅輝等[9-10]研制出一種水稻覆膜插秧機,可以實現破膜與插秧同步作業,但該機型并未實現大面積的推廣使用。國內對于水稻覆膜打孔栽植裝置的研制較少,由兩套機構分別完成破膜與插秧動作,在實際作業中,很難保證秧苗正好插入穴口中,出現了傷根傷苗等現象[11-13]。水稻高速插秧機直接用秧爪破膜栽植,會對水稻的根系造成一定傷害,破膜與栽植質量均受影響[14]。水稻膜上機械化栽植均采用插秧方式,而將水稻缽苗移栽與破膜打孔栽植相結合的裝備研究未見相關文獻報道,該項農藝技術的機械化生產對于有機水稻的生產與后續研究具有重要的意義。
本文將帕斯卡蝸線齒輪[15-16]行星輪系與圓柱齒輪行星輪系相結合,提出一種同時滿足膜上開孔與水稻缽苗移栽的移栽機構,并基于該機構開發優化設計軟件,通過對機構的結構與設計優化,使得移栽機構的夾秧片實現水稻缽苗移栽所需的環扣形軌跡,破膜刀具隨著圓柱齒輪的轉動實現缽苗移栽前的破膜作業。由一套機構依次完成取苗、輸送、破膜和栽植一系列動作,避免因破膜與水稻栽植不同步而造成的秧苗損傷問題。
1 移栽機構工作原理與軌跡分析
1.1 工作原理
移栽機構是水稻缽苗膜上移栽機的核心工作部件,機構的工作原理圖如圖1所示。該機構的傳動部分由5個相互嚙合的非圓齒輪和5個相互嚙合的圓柱齒輪組成,由于兩側移栽臂的運動軌跡和姿態是相同的,因此僅對單側移栽臂進行說明。其工作原理為:圓柱太陽輪、非圓太陽輪與機架固裝,機構運轉時保持相對靜止狀態。動力由動力輸出軸傳遞給齒輪箱使其做勻速圓周運動。在齒輪箱的帶動下,圓柱中間齒輪與圓柱行星齒輪繞齒輪箱做定軸轉動,圓柱齒輪之間相互嚙合,形成勻速轉動的圓柱行星齒輪機構,驅動與行星軸固連的破膜刀具完成破膜運動。移栽臂在隨齒輪箱體勻速轉動的同時,相互嚙合的非圓齒輪驅動移栽臂做不等速運動,兩個運動的合成,形成了特定的水稻缽苗移栽軌跡與姿態。圓柱齒輪間的嚙合作用使破膜刀具在圓周運動的過程中作平動,形成圓形的相對運動軌跡。

圖1 移栽機構工作原理圖Fig.1 Working principle diagram of transplanting mechanism1.動力輸出軸 2.圓柱太陽輪 3.中間軸 4.圓柱中間輪 5.行星軸 6.圓柱行星輪 7.齒輪箱 8.破膜刀具 9.移栽臂 10.非圓行星輪 11.非圓中間輪 12.非圓太陽輪 13.機架
1.2 作業軌跡與姿態
保證水稻缽苗膜上移栽機構栽植質量的關鍵,是對移栽和破膜軌跡的形狀與姿態進行優化設計。為了達到移栽要求,本文確定破膜刀具采用余擺線形狀的絕對運動軌跡,移栽臂端部尖點采用環扣形的相對運動軌跡,并保證膜上開孔與缽苗移栽依次完成。
回轉式移栽機構旋轉一周所形成的環扣形相對運動軌跡如圖2所示,通過模擬人工移栽水稻缽苗的動作,實現移栽過程。在初始位置時,夾秧片處于張開狀態。機構按順時針方向旋轉,夾片在A點開始閉合夾緊。通過A點后,要完成缽苗從缽盤中取出且不能傷害缽苗的根部,需使秧苗沿著垂直缽盤方向且近似直線的AB段取出秧苗,拔出的距離應大于缽土的深度,避免缽苗與秧箱干涉損壞秧苗。BCDE段是秧苗的輸送階段,夾片一直處于夾持秧苗的狀態,此過程中要保證夾片與所夾秧苗不與秧箱干涉。移栽機構在E點處完成推秧動作,實現缽苗的栽植過程。破膜刀具工作狀態下形成余擺線形的軌跡如圖3所示,能夠達到破膜的作業效果,并可保證在移栽臂開始取秧時,刀具尖端遠離缽盤,避免干涉。破膜和栽植依次完成,推秧機構將水稻缽苗強制彈入刀具所形成的穴口中。在EFC段(圖2),夾片處于張開狀態,移栽臂轉到初始位置準備下一周期的栽植作業,回轉體旋轉一周,水稻秧苗栽植2次。
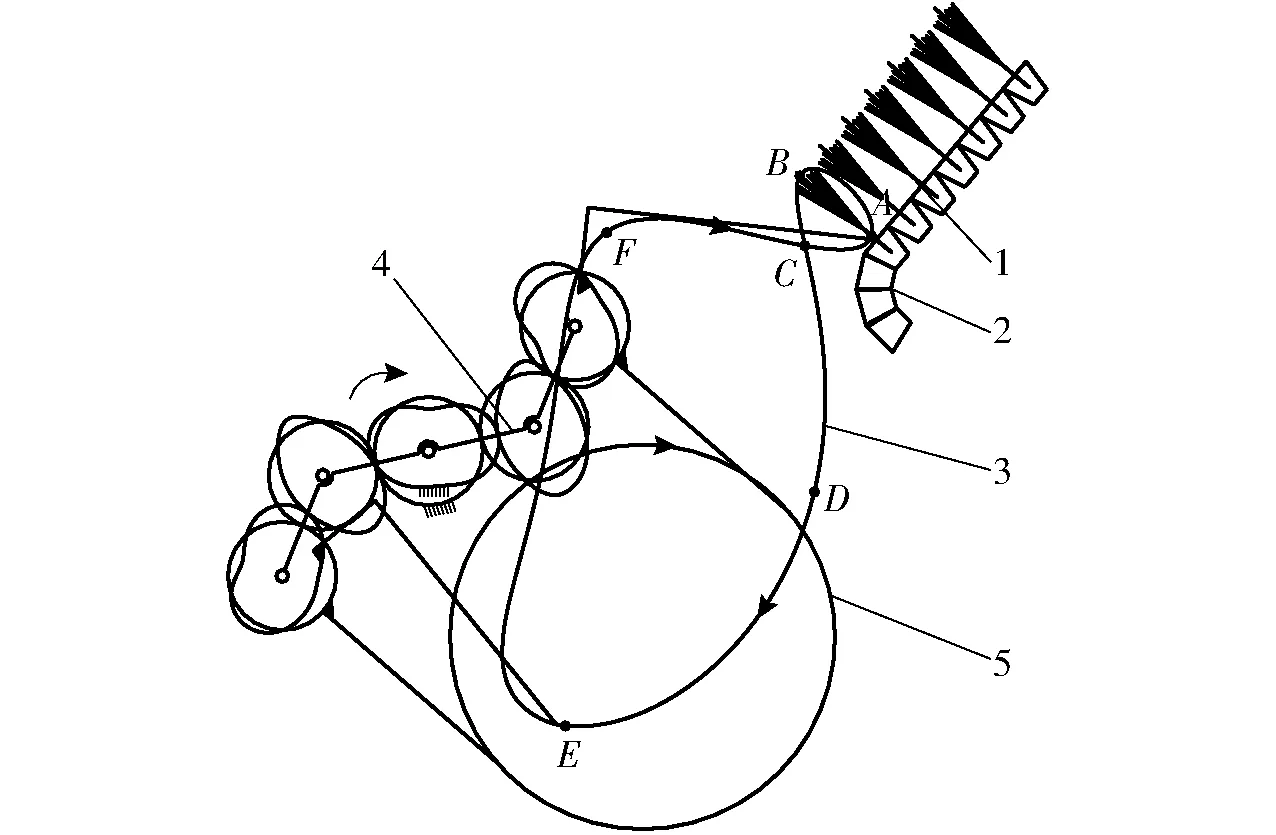
圖2 移栽機構相對運動軌跡Fig.2 Relative motion trace of transplanting mechanism1.水稻缽苗 2.缽盤 3.移栽相對運動軌跡 4.移栽機構 5.破膜相對運動軌跡

圖3 移栽機構絕對運動軌跡Fig.3 Absolute motion trace of transplanting mechanism1.移栽機構 2.移栽動軌跡 3.破膜動軌跡 4.地面
2 移栽機構運動學模型建立
以太陽輪轉動中心O1為原點,水平方向為X軸,垂直方向為Y軸建立坐標系,機構簡圖如圖4所示,具體建模過程如下:
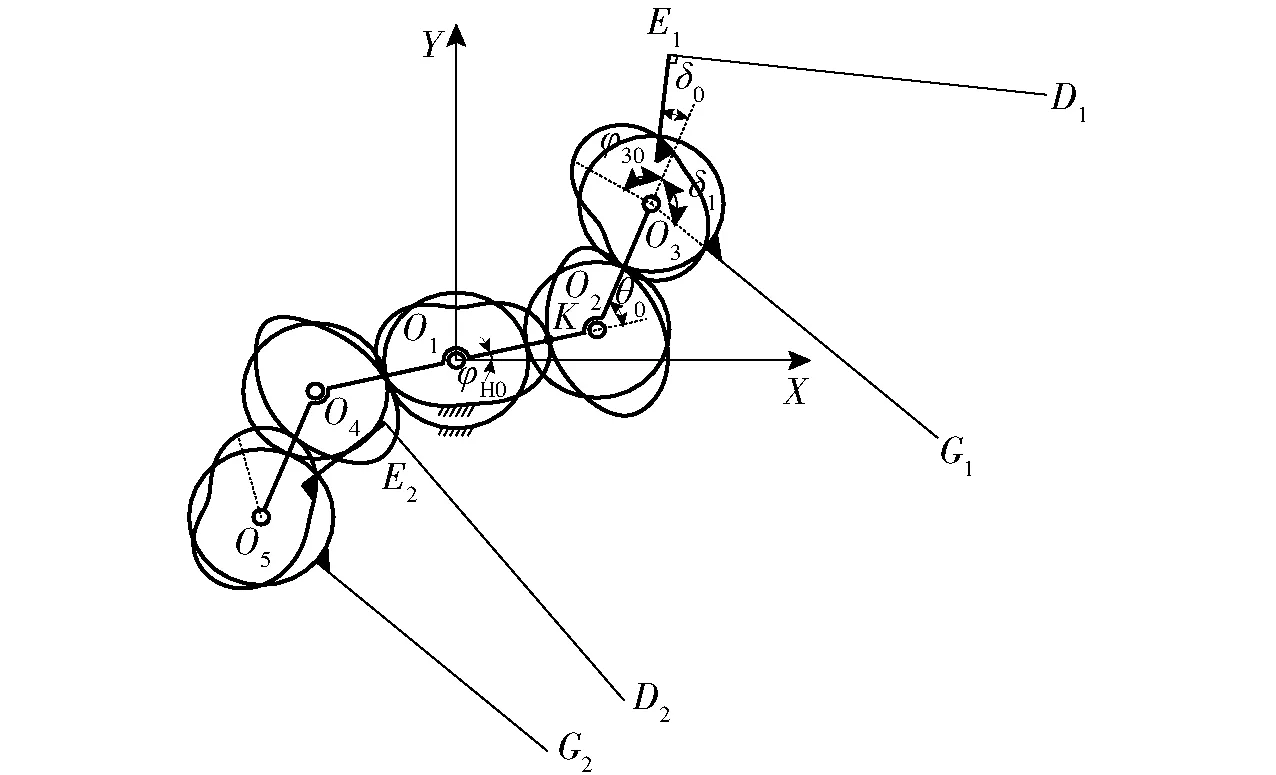
圖4 移栽機構簡圖Fig.4 Transplanting mechanism diagram
在移栽機構轉動的過程中,行星架與動力輸出軸固連,做順時針勻速轉動。非圓太陽輪與非圓行星輪為完全相同的齒輪,K為非圓太陽輪與上非圓中間輪的嚙合點。其中φH0表示行星架的初始安裝角,βj(φ)為齒輪j相對行星架的轉角,φj(φ)為齒輪j的絕對轉角,規定行星架順時針轉動角度為負,逆時針轉動角度為正。當行星架順時針轉過φ,則
行星架的絕對運動轉角φH(φ)為
φH(φ)=φH0-φ
(1)
齒輪1(非圓太陽輪)相對行星架的轉角和絕對轉角分別為
(2)
齒輪2(上非圓中間輪)相對行星架的轉角和絕對轉角分別為
(3)
其中
r2(i)=a-r1(i)
(4)
式中r1(i)——非圓太陽輪轉動中心與嚙合點K的距離,mm
r2(i)——非圓中間輪轉動中心與嚙合點K的距離,mm
a——相互嚙合的非圓齒輪中心距,mm
齒輪3(上非圓行星輪)相對行星架的轉角和絕對轉角分別為
(5)
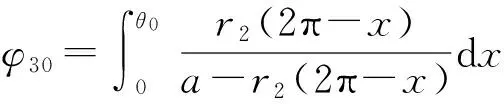
(6)
式中φ30——行星架拐角所引起的非圓行星輪初始安裝角,rad
θ0——行星架的拐角,rad
若β2(φ)=π+θ0,則φ30=φ。
齒輪4(下非圓中間輪)相對行星架的轉角和絕對轉角分別為
(7)
齒輪5(下非圓行星輪)相對行星架的轉角和絕對轉角分別為
(8)
由于5個圓柱齒輪半徑均為a/2,因此圓柱齒輪間的傳動比為1,圓柱行星輪在行星架圓周運動過程中作平動。
(xOj(φ),yOj(φ))表示齒輪j轉動中心的坐標,則
(9)
(10)
(11)
(12)
(13)
(xEj(φ),yEj(φ))為移栽臂拐點Ej的坐標,則
(14)
(15)
式中lO3E1——非圓行星輪轉動中心O3到移栽臂拐點E1的距離,mm
δ0——移栽臂的初始安裝角,rad
(xDj(φ),yDj(φ))為移栽臂尖點Dj的坐標,則
(16)
(17)
式中lE1D1——移栽臂拐點E1到移栽臂尖點D1的距離,mm
(xGj(φ),yGj(φ))為破膜刀具尖點Gj的坐標,則
(18)
(19)
式中lO3G1——非圓行星輪轉動中心O3到破膜刀具尖點G1的距離,mm
δ1——破膜刀具在初始安裝位置與行星架的夾角,rad
3 計算機輔助優化設計軟件開發
對于水稻缽苗膜上移栽機構的設計研究,采用傳統的方法很難解決多目標且強耦合性優化難題。因此,本文基于理論分析與目標函數開發出移栽機構的優化設計軟件,簡化了設計過程、便于設計人員操作,大幅度縮短移栽機構的設計周期。
3.1 移栽機構優化目標確定
根據水稻缽苗膜上種植的農藝要求,需要確定移栽機構在栽植過程中所需滿足的目標要求,目標的確立是評判優化參數是否符合要求的重要指標。在優化機構參數時[17-19],設立目標如下:①破膜穴口在35~65 mm之間。②移栽臂部件轉動過程中互不干涉。③軌跡高度大于260 mm。④破膜孔與栽植的缽苗同穴。 ⑤取秧角介于-5°~15°之間。⑥推秧角介于45°~60°之間。⑦角度差介于40°~50°之間。⑧破膜刀具與異側的移栽臂互不干涉。⑨齒輪箱運動最低點距地面大于15 mm。⑩同軸破膜刀具與移栽臂互不干涉。齒輪模數大于2.5 mm。夾持狀態的缽苗在輸送過程中不與秧盤干涉。取苗時,拔出缽苗的距離大于缽盤深度18 mm。
根據建立的運動學模型,通過Visual Basic 6.0匯編語言編寫栽機構優化設計軟件[20],其中主從動非圓輪的節曲線都是封閉的,滿足齒輪做單向連續傳動,以傳遞周期性的運動關系[21]。
3.2 移栽機構優化軟件
圓柱齒輪行星輪系帶動刀具完成破膜開孔的動作,非圓齒輪行星輪系帶動移栽臂完成缽苗移栽的動作,破膜與栽植依次完成。本軟件通過對移栽機構的結構尺寸、位置和運動狀態的模擬,通過參數的調節以達到所設定的目標,實現對移栽機構的優化過程,優化軟件界面如圖5所示。
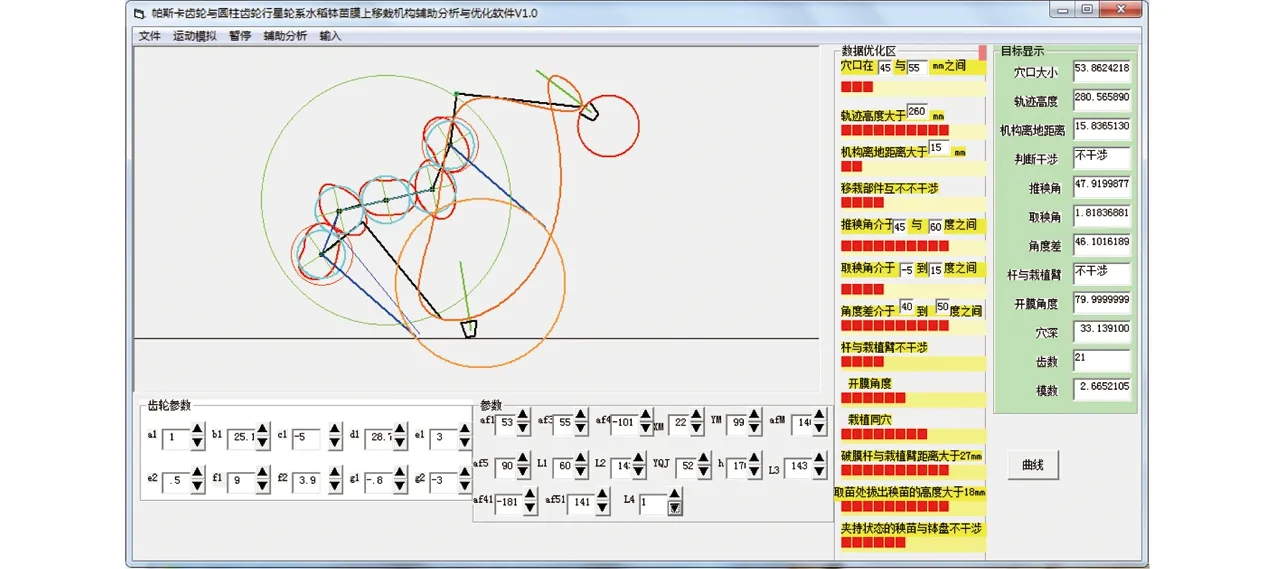
圖5 計算機輔助優化設計軟件界面Fig.5 Interface of computer aided optimization design software
應用計算機輔助優化設計軟件,得到一組滿足水稻缽苗膜上移栽農藝要求的機構參數。齒輪節曲線參數包括:a1=1,b1=25.1,c1=-5,d1=28.7,e1=3,e2=0.5,f1=9,f2=3.9,g1=-0.8,g2=-3。結構參數包括:移栽臂第1段長度l1=60 mm,移栽臂第2段長度l2=143 mm,破膜刀具長度l3=143 mm,秧箱中心橫坐標xm=221 mm,秧箱中心縱坐標ym=99 mm,株距H=170 mm,行星架初始安裝角φH0=53°,行星架拐角θ0=55°,移栽臂初始安裝角δ0=-101°,移栽臂拐角φ1=90°,行星架整體轉角φ2=140°,破膜刀具初始安裝角δ1=-181°,秧箱傾角λ=52°。
4 物理樣機驗證試驗
4.1 高速攝影試驗
根據優化軟件所得的參數對移栽機構進行結構設計,包括通過非圓節曲線參數設計非圓齒輪行星系結構,通過結構參數完成移栽臂和破膜刀的設計,并按照初始安裝位置參數完成移栽機構的整體裝配。利用CATIA軟件建立機構的三維模型,將裝配好的模型導入ADAMS軟件中進行虛擬樣機的運動仿真,移栽機構相對運動狀態下的移栽與破膜軌跡如圖6所示。
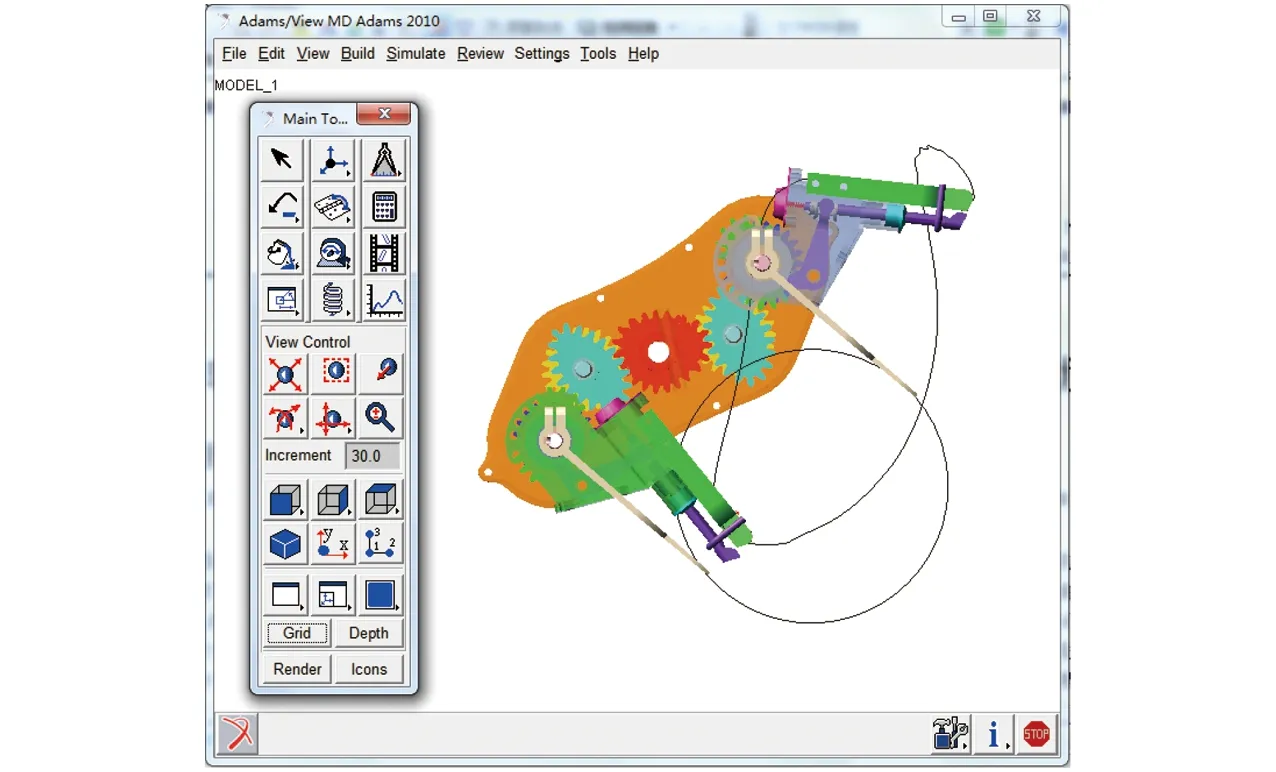
圖6 虛擬仿真軌跡Fig.6 Virtual simulation trajectory
應用3D打印技術對回轉式移栽機構的主要零部件進行加工并完成裝配。大幅度縮短物理樣機的加工與研制周期,不僅可以快速檢驗樣機結構設計是否正確與合理,而且節約了復雜零部件的加工成本,為今后批量生產和開發模具奠定良好的研究基礎。
移栽機構取苗與破膜相關零部件采用金屬材質零件,將裝配好的物理樣機安裝在課題組自主研發的移栽機構試驗臺架上[22]。設定機構轉速100 r/min,試驗選用東農425粳型常規水稻新種,利用高速攝影技術完成移栽機構的驗證試驗。試驗中移栽機構各個關鍵位置的轉角與姿態以及取苗結果如圖7所示,機構轉動一周完成兩次取苗,推秧效果良好。移栽機構移栽臂尖點與破膜刀具尖點運轉過程中的相對運動軌跡如圖8所示。物理樣機所得軌跡與優化設計軟件、虛擬仿真結果基本一致,驗證了移栽機構設計的正確性與合理性。

圖8 移栽臂尖點與破膜刀具尖點的相對運動軌跡Fig.8 Relative motion trajectories of tip points of transplanting arm and broken film cutter
4.2 性能驗證試驗
水稻缽苗膜上移栽機構將水稻缽苗移栽與破膜打孔相結合,其關鍵在于移栽機構的取苗成功率以及破膜與栽植的配合效果,本文對移栽機構進行取苗試驗以及膜上移栽的性能驗證試驗。
4.2.1取苗試驗
取苗試驗選用塑料軟質缽盤育秧,水稻秧盤穴孔的頂部和底部均為正方形,缽盤穴口大小為20 mm×20 mm,底部尺寸為9 mm×9 mm,缽盤穴深為18 mm,缽盤橫向和縱向穴數分別為14穴和29穴,并且橫向和縱向相鄰穴孔中心距離均為20 mm。試驗設定移栽機構轉速為100 r/min,共對3盤缽苗共1 218穴進行取苗試驗。試驗過程中,機構運轉平穩,振動小,成功取出并完成推秧的缽苗共有1 130株,平均取苗成功率為92.8%,而未取出秧苗的主要原因包括育秧過程中缽苗之間的相互連根導致的空穴、秧根從秧盤底部竄出過多以及秧盤本身空穴或秧苗過少的情況等,整體取苗結果可以滿足缽苗移栽的要求。
4.2.2膜上移栽試驗
試驗用地膜為0.02 mm塑料薄膜,將移栽機構安裝在高速缽苗移栽機上,配合土槽實施移栽試驗,試驗采取正常作業模式,即土槽靜止,整機向前運動作業,設定栽植速度與前進速度為定速比(株距為定值17 cm),如圖9所示。將土槽內的土壤環境模擬稻田實際狀態,土壤深度為10 cm,泡田時間24 h,水層深度控制在5 mm左右。移栽機構在100 r/min的轉速下重復進行5組試驗,每組試驗選取速度穩定、株距均勻的10個膜孔進行測量。膜孔長度直接影響水稻生長以及除草、增溫效果,水稻栽植到膜孔的同步效果將影響秧苗栽植質量與生長狀況,故試驗對膜孔長度進行測量,并選取水稻缽苗在膜上栽植的合格率為評價指標,計算公式為
(20)
式中Q——缽苗栽植合格率,%
w1——栽植合格數,個
w——總栽植數,個
其中移栽機構將水稻缽苗取出并配合破膜刀將所取缽苗栽植到膜孔中即為合格。

圖9 膜上移栽試驗裝置Fig.9 Transplanting test device on film
試驗結果如表1所示,實際測量的膜孔長度與設定的理論膜孔長度基本相符,但實際作業中破膜的深度有一定差異,因此造成穴口長度存在相應差異,但仍能滿足作業要求;根據試驗移栽與破膜的配合要求,對試驗數據進行計算得到水稻缽苗膜上栽植的合格率為90%,滿足機構設計和作業要求。
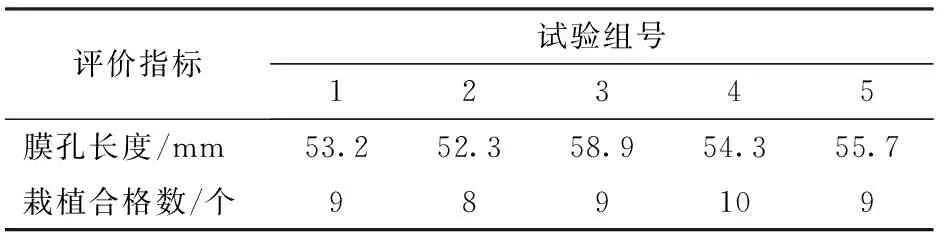
表1 試驗結果Tab.1 Results of test
5 結論
(1)提出了一種水稻缽苗膜上移栽機構,可依次完成取苗、輸送、破膜和栽植一系列動作,結構簡單、成本低,有利于促進水稻缽苗移栽和膜上栽植技術相結合的推廣應用,具有現實應用價值。
(2)基于VB6.0軟件開發出移栽機構的優化設計軟件,解決了移栽機構多目標、多參數、強耦合性的復雜優化難題,最終優化出一組較優的結構參數,滿足移栽機構實現破膜和缽苗移栽的軌跡與姿態要求。
(3)建立機構虛擬樣機,設計機構物理樣機,開展機構虛擬運動仿真和高速攝像運動試驗,試驗結果與理論分析所得軌跡基本保持一致,驗證了移栽機構設計的正確性。
(4)在試驗臺架上完成了移栽機構物理樣機的取苗試驗,在行星架轉速為100 r/min下,平均取苗成功率為92.8%,水稻缽苗膜上栽植的合格率為90%。
1劉洋,張玉燭,王學華,等.水稻覆膜栽培研究現狀與展望[J].湖南農業科學,2009(2):55-58.
LIU Yang, ZHANG Yuzhu, WANG Xuehua, et al. Status quo and prospect for film-covering cultivated rice [J]. Hunan Agricultural Sciences, 2009(2): 55-58. (in Chinese)
2張玉良.水稻覆膜機械裝置的結構研究與設計[J].農業與技術, 2014(5):50-51.
3馬維新,李如意,蘭保國,等.有機水稻覆膜插秧技術研究[J].寧夏農林科技, 2013, 54(9):15-16.
MA Weixin, LI Ruyi, LAN Baoguo, et al.Preliminary experiment of film mulching transplanting technology for organic rice [J]. Ningxia Journal of Agriculture and Forestry Science and Technology, 2013, 54(9): 15-16.(in Chinese)
4任文濤,辛明金,林靜,等.水稻紙膜覆蓋種植技術節水控草效果的試驗研究[J].農業工程學報, 2003, 19(6):60-63.
REN Wentao,XIN Mingjin,LIN Jing,et al.Experimental study on effect of paper-mulching rice planting technology on saving water and controlling weeds [J].Transactions of the CSAE, 2003, 19(6): 60-63. (in Chinese)
5牟雪雷,于磊,韓休海,等.有機水稻覆膜插秧技術研究[J].農業科技與裝備, 2015(6):67-68.
MU Xuelei, YU Lei, HAN Xiuhai, et al.Study on the technique of organic rice mulching and transplanting [J].Agricultural Science & Technology and Equipment, 2015(6): 67-68. (in Chinese)
6于曉旭,趙勻,陳寶成,等.移栽機械發展現狀與展望[J/OL].農業機械學報, 2014, 45(8):44-53.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140808&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.08.008.
YU Xiaoxu, ZHAO Yun, CHEN Baocheng,et al.Current situation and prospect of transplanter [J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(8): 44-53. (in Chinese)
7XIN Liang, Lü Zhijun, WANG Wenqing, et al. Optimal design and development of a double-crank potted rice seedling transplanting mechanism [J]. Transactions of the ASABE, 2017, 60(1): 31-40.
8俞高紅,黃小艷,葉秉良,等.旋轉式水稻缽苗移栽機構的機理分析與參數優化[J].農業工程學報, 2013,29(3):16-22.
YU Gaohong, HUANG Xiaoyan, YE Bingliang, et al.Principle analysis and parameters optimization of rotary rice pot seedling transplanting mechanism [J]. Transactions of the CSAE, 2013, 29(3): 16-22. (in Chinese)
9永田雅輝,日吉健二,梅崎輝尚,等. 早期水稲のマルチ栽培用田植機に関する基礎研究(第1報):ナイフ式マルチ穴開け機構の開発[J].農業機械學會誌, 1998, 60(1): 19-26.
10日吉健二,永田雅輝,梅崎輝尚,等. 早期水稲のマルチ栽培用田植機に関する基礎研究(第2報):ナイフ式マルチ穴開け機構の理論的解析[J]. 農業機械學會誌, 1998, 60(2): 11-18.
11王威.一種帶有切膜刀組合的覆膜插秧一體機:201410339775.1[P].2014-07-17.
12陳海濤,趙陽,侯守印,等.同步膜上開孔插秧裝置運動學仿真與參數優化試驗[J].農業工程學報,2016,32(11):25-30.
CHEN Haitao,ZHAO Yang,HOU Shouyin,et al.Kinematics simulation and parameter optimization experiment for transplanting synchronous puncher [J]. Transactions of the CSAE, 2016, 32(11): 25-30. (in Chinese)
13張玉良.水稻節水機械自動覆膜裝置的試驗研究[D].長春:吉林農業大學, 2012.
ZHANG Yuliang.The experimental study of mechanical automatic filming device with saving water on rice [D]. Changchun: Jilin Agricultural University, 2012. (in Chinese)
14張子浩,陳海濤,頓國強,等.水稻插秧機植物纖維地膜敷設裝置開口機構設計[J].農機化研究, 2015,37(3):79-82.
ZHANG Zihao,CHEN Haitao,DUN Guoqiang,et al.Optimal design of plant fiber film mulching device synchronous cutting mechanism on rice transplanter [J]. Journal of Agricultural Mechanization Research, 2015, 37(3): 79-82. (in Chinese)
15賁紅艷,陳家寅.蝸線齒輪及其共軛齒輪節曲線的設計[J].燕山大學學報, 2012, 36(5):388-392.
BEN Hongyan, CHEN Jiayin. Design of pitch curves for limacon gear and conjugated gear [J].Journal of Yanshan University, 2012, 36(5): 388-392. (in Chinese)
16王國強,藺文剛,趙云鵬.Pascal蝸線齒輪的設計研究[J].自動化與儀器儀表, 2016(6):87-89.
17趙勻.農業機械分析與綜合[M].北京:機械工業出版社, 2009.
18瞿彬,王鳳林.Visual Basic程序設計全程指南[M].北京:電子工業出版社, 2009.
19ZHOU Maile, SUN Liang, DU Xiaoqiang, et al.Optimal design and experiment of rice pot seedling transplanting mechanism with planetary Bezier gears [J].Transactions of the ASABE, 2014, 57(6), 1537-1548.
20陳建能,王英,黃前澤,等. 缽苗移栽機變形橢圓齒輪行星系植苗機構優化與試驗[J/OL]. 農業機械學報, 2013, 44(10):52-56.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20131009&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.10.009.
CHEN Jianneng, WANG Ying, HUANG Qianze, et al.Optimization and test of transplanting mechanism with planetary deformed elliptic gears for potted-seedling transplanter [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(10): 52-56. (in Chinese)
21陳建能,葉軍,趙華成,等. 高階變性偏心共軛非圓齒輪的凹凸性及根切判別[J]. 中國機械工程, 2014, 25(22): 3028-3033.
CHEN Jianneng, YE Jun, ZHAO Huacheng, et al.Concavity and tooth undercutting of high-order deformed eccentric conjugate non-circular gears [J]. China Mechanical Engineering, 2014, 25(22): 3028-3033. (in Chinese)
22宮成宇.多功能缽苗移栽試驗臺設計與試驗研究[D].哈爾濱:東北農業大學, 2013.
GONG Chengyu.Test-bed design and experiment research on multi-function transplanting machine [D].Harbin:Northeast Agricultural University, 2013. (in Chinese)
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-12-27 19:44:27
房地產導刊(2022年5期)2022-06-01 06:20:14
今日農業(2021年21期)2021-11-26 05:07:00
軍事文摘(2021年22期)2021-11-26 00:43:51
今日農業(2021年14期)2021-10-14 08:35:40
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
文苑(2020年6期)2020-06-22 08:41:52