基于自動導航的小麥精準對行深施追肥機設計與試驗
2018-04-19 00:36:25馮慧敏高娜娜孟志軍陳立平郭玉明
農(nóng)業(yè)機械學報 2018年4期
馮慧敏 高娜娜 孟志軍 陳立平 李 由 郭玉明
(1.山西農(nóng)業(yè)大學工學院, 太谷 030801; 2.北京農(nóng)業(yè)信息技術研究中心, 北京 100097;3.北京農(nóng)業(yè)智能裝備技術研究中心, 北京 100097)
0 引言
冬小麥返青后追施氮肥對產(chǎn)量提高作用顯著,改變傳統(tǒng)的氮肥地表撒施,采用機械深施技術可以降低氮肥揮發(fā)速率[1-2],有效提高氮肥利用率,減少環(huán)境污染;還可以提高作物干物質(zhì)積累量,提高小麥產(chǎn)量,提升籽粒品質(zhì)[3-4],同時也是一種減少極端天氣造成農(nóng)業(yè)生產(chǎn)損失的有效途徑[5]。
目前,國內(nèi)小麥追施氮肥以人工和機械表層撒施為主,氮肥因NH3揮發(fā)而浪費,肥效利用率低,增產(chǎn)作用發(fā)揮不充分[6-8]。國內(nèi)外許多學者對氮肥深施技術給予了廣泛關注和研究[9-10],通過對氮肥施用量的精確決策與合理施用,提高氮肥利用率,目標集中在充分發(fā)揮效率,減少施肥量[11-12]。國內(nèi)冬小麥追肥技術研究主要集中在追肥方法對小麥生長性狀的影響[5,13]和精確控制施肥技術方面[14-17],針對小麥深施追肥農(nóng)藝與農(nóng)機緊密結合的追肥技術作業(yè)裝備研究相對較少。小麥屬于密植作物,在追肥作業(yè)過程中存在因追肥機不易走直導致深施肥作業(yè)部位不精準及小麥苗根嚴重損傷致使產(chǎn)量降低等問題。
因此,針對冬小麥返青后深施追肥作業(yè)需求,基于拖拉機自動導航技術[18],開展精準對行精量深施技術研究,設計小麥精準對行精確深施追肥機,以小麥追肥農(nóng)藝要求為指導,精確控制排肥量,將氮肥準確深施在兩相鄰小麥種植寬行行間,實現(xiàn)降低氮肥施用量,提高氮肥利用率;同時降低小麥苗根損傷風險,提高小麥產(chǎn)量和品質(zhì)。
1 主要結構設計與工作原理
1.1 總體結構
小麥精準對行深施追肥機包括精量排肥控制系統(tǒng)、追肥裝置、精準對行系統(tǒng)3部分。精量排肥控制系統(tǒng)主要包括車載終端、施肥控制器、液壓馬達、電液比例閥、角位移傳感器、壓力傳感器、RTK-GNSS接收機及天線等;追肥裝置由肥箱、排肥軸、排肥器、雙圓盤開溝器、覆土輪等組成。追肥機與拖拉機三點懸掛機構連接,其動力傳動采用液壓傳動。總體結構如圖1所示,追肥機安裝有7個排肥器,間隔30 cm,在小麥種植寬行內(nèi)進行深施追肥。
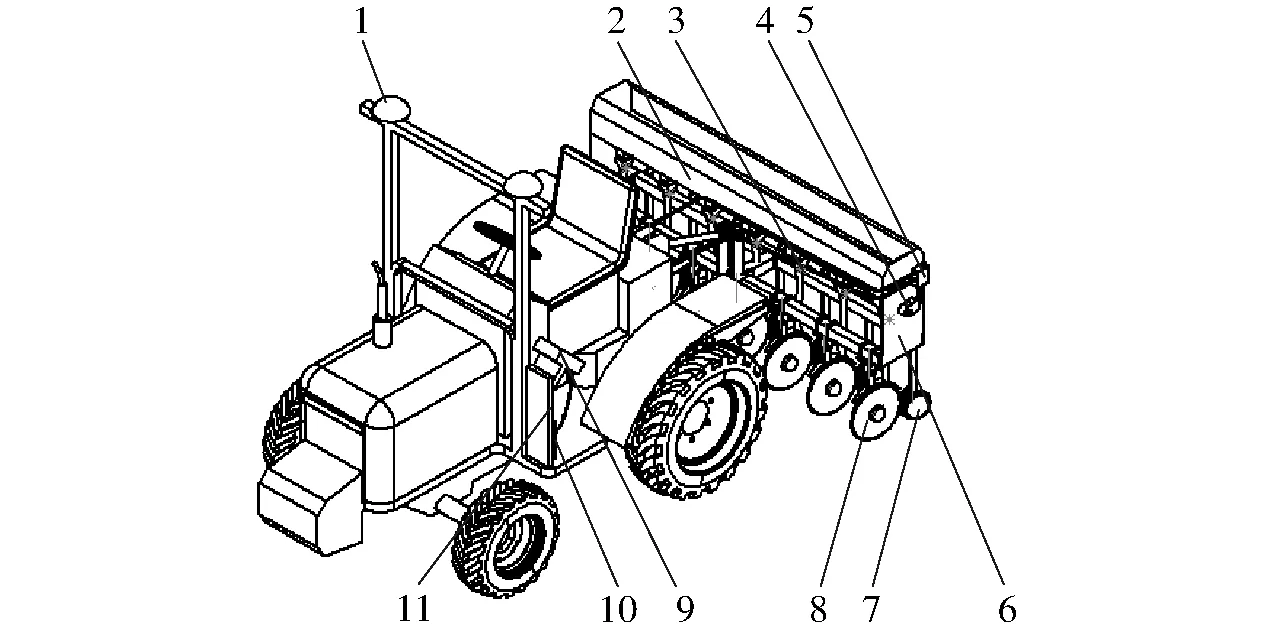
圖1 小麥精準對行深施追肥機結構示意圖Fig.1 Structure sketch of precisely control topdressing fertilization applicator1.GNSS天線 2.肥箱 3.外槽輪排肥器 4.液壓馬達 5.電液比例閥 6.機架 7.覆土輪 8.雙圓盤開溝器 9.車載終端 10.施肥控制器 11.RTK-GNSS接收機
1.2 工作原理
小麥精準對行深施追肥機根據(jù)小麥種植寬行分布位置設定機具作業(yè)路徑,在帶有自動導航系統(tǒng)的拖拉機牽引下,追肥機按照設定的路徑前進;作業(yè)過程保證拖拉機在精準對行的前提下,行駛速度與電液系統(tǒng)控制液壓馬達轉速實時匹配,實現(xiàn)精確控制排肥量。車載終端接收RTK-GNSS接收機數(shù)據(jù),實時獲取拖拉機行進速度信息,根據(jù)追肥控制模型計算出液壓馬達對應的目標轉速,通過CAN總線將目標轉速指令發(fā)送給施肥控制器;施肥控制器根據(jù)編碼器測量馬達的實際轉速信號,通過調(diào)節(jié)電液比例閥開度實現(xiàn)液壓馬達轉速閉環(huán)控制;液壓馬達驅(qū)動排肥軸,從而帶動排肥槽輪轉動,排肥器將肥料排至雙圓盤式開溝器在小麥種植寬行中間所開的肥溝內(nèi),覆土輪覆土將肥料覆蓋,防止肥料揮發(fā)。
2 追肥深施開溝裝置設計
追施氮肥的施入深度達10 cm及以上時可有效提高肥料利用率,達到作物增產(chǎn)的目的[19-21]。本追肥裝置主要實現(xiàn)在相鄰小麥種植行間開溝作業(yè),達到深施肥農(nóng)藝要求的落肥深度,盡可能減少開溝器對土壤擾動作用。因此追肥深施裝置由雙圓盤開溝器和覆土輪構成,通過兩圓盤滾動前進完成切土開溝,其開溝寬度較小,對土層擾動小,既有利于土壤保水保墑又可減少苗根損傷。所用雙圓盤開溝器參數(shù)為:圓盤直徑為350 mm,圓盤夾角θ為10°,聚點m位置高度為100 mm,結構示意圖如圖2所示,所開溝形輪廓如圖3所示。
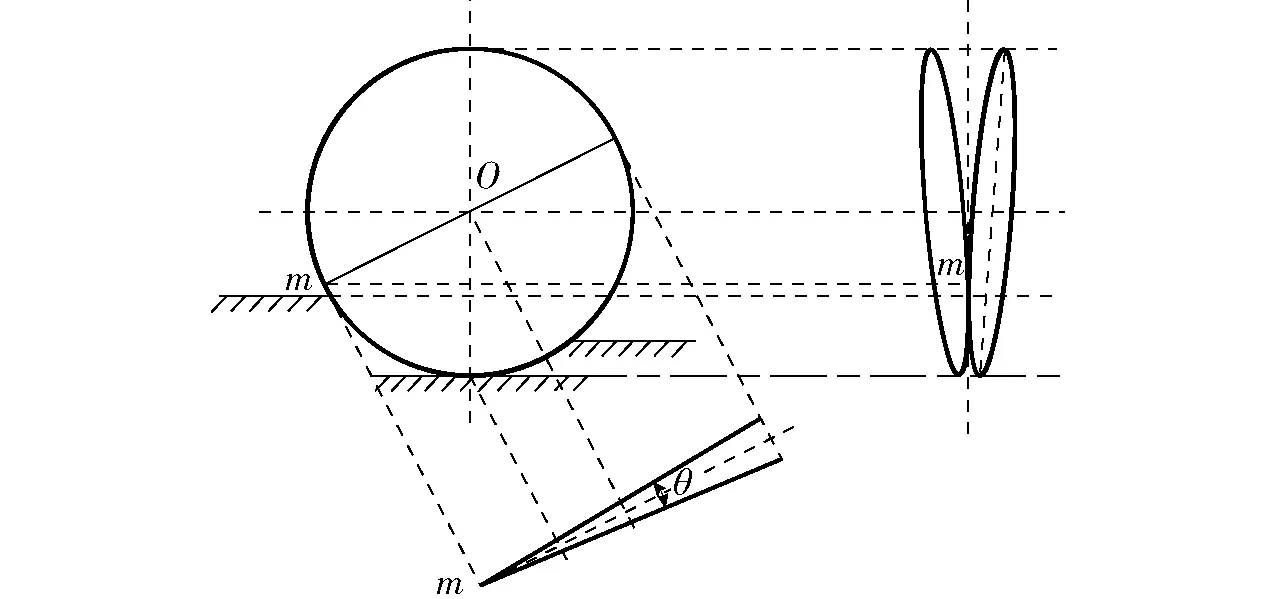
圖2 雙圓盤開溝器結構示意圖Fig.2 Structure diagrams of double-disc opener
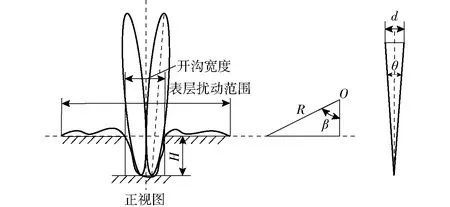
圖3 開溝輪廓圖Fig.3 Profile of furrow
當雙圓盤開溝器開溝深度為100 mm時,根據(jù)圖3及公式計算地面開溝寬度
(1)
式中β——圓盤位置夾角,(°)
R——圓盤半徑,mm
H——開溝深度,mm
L——聚點位置對應弦長,mm
d——開溝寬度,mm
代入上述圓盤參數(shù),得出d=55.12 mm,即理論地面開溝寬度為55.12 mm,當小麥種植行距大于20 cm時,可避免開溝器對小麥根系割傷,但實際中表層土壤板結等原因會出現(xiàn)裂縫形成土塊,開溝作業(yè)時的擾動范圍要偏大。由于雙圓盤開溝器回土效果較差,本機選用雙圓盤覆土器,安裝在對應開溝器正后方位置,當肥料落入肥溝后及時覆土掩蓋肥料,避免肥效損失。
3 精量排肥控制系統(tǒng)設計
3.1 精量排肥控制系統(tǒng)原理
精量排肥控制系統(tǒng)主要以目標施肥量和追肥機作業(yè)參數(shù)等信息為依據(jù),通過控制液壓馬達轉速與拖拉機行駛速度信息相匹配,達到精量均勻排肥的目標,系統(tǒng)工作原理如圖4所示。
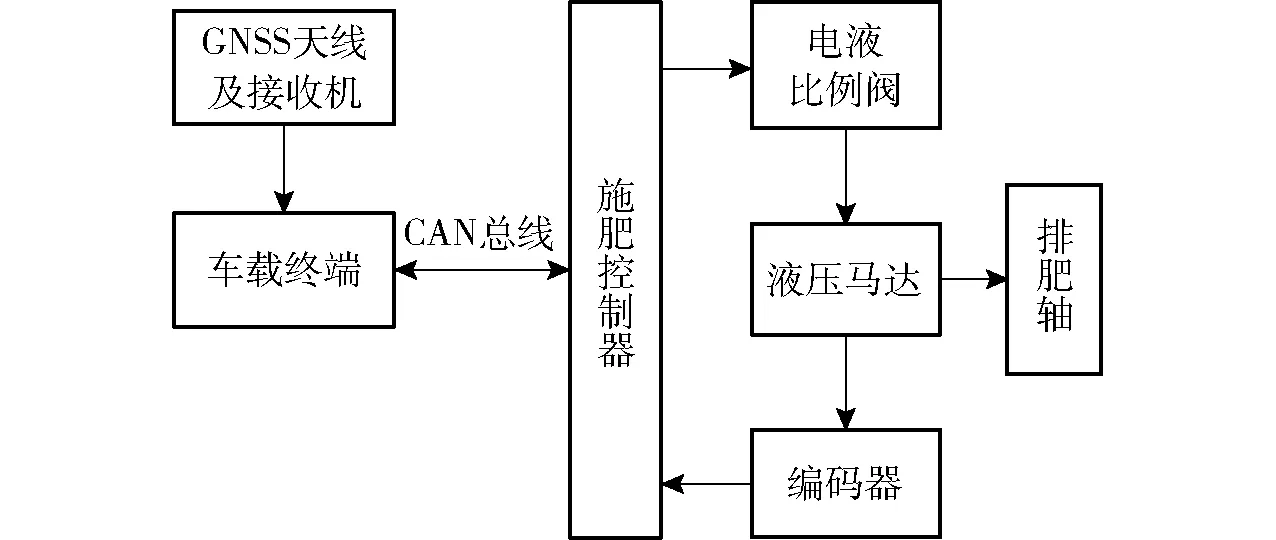
圖4 精量排肥系統(tǒng)原理圖Fig.4 Schematic diagram of precise topdressing fertilization
系統(tǒng)包括RTK-GNSS接收機、車載終端、施肥控制器、電液比例閥、液壓馬達、排肥軸等。由RTK-GNSS接收機完成拖拉機位置信息的實時采集,RTK-GNSS接收機與車載終端通過RS232串口實現(xiàn)通信。車載終端通過解析GNSS語句完成拖拉機行進速度信息與經(jīng)緯度坐標獲取,通過控制軟件中的追肥模型計算液壓馬達目標轉速,并通過CAN總線將指令發(fā)送到施肥控制器。施肥控制器根據(jù)接收到的控制指令,獲取編碼器采集的液壓馬達實際轉速,通過PID控制算法計算控制量,控制電液比例閥開度實現(xiàn)液壓馬達轉速精確控制達到精量排肥。由于精量排肥系統(tǒng)采用RTK-GNSS進行速度測量,采用液壓馬達驅(qū)動排肥裝置工作,可有效避免由于地輪打滑等造成排肥不均及地輪對土壤過度壓實的問題。
3.2 硬件系統(tǒng)設計
3.2.1液壓系統(tǒng)
液壓系統(tǒng)包括比例電磁閥、液壓馬達,其動力來自拖拉機后液壓輸出,系統(tǒng)原理圖如圖5所示。系統(tǒng)主要通過電控系統(tǒng)輸出的電流信號改變電磁閥閥門開度,調(diào)節(jié)電磁閥的流量,流量流經(jīng)液壓馬達驅(qū)動馬達轉動,達到精準控制馬達與排肥軸轉速的目的。其中PV08-30型比例型電磁閥最大控制電流為(1 400±150) mA;AGM-6型液壓減速馬達最大恒定轉速為120 r/min,可滿足農(nóng)機作業(yè)中對排肥軸轉速的需求。
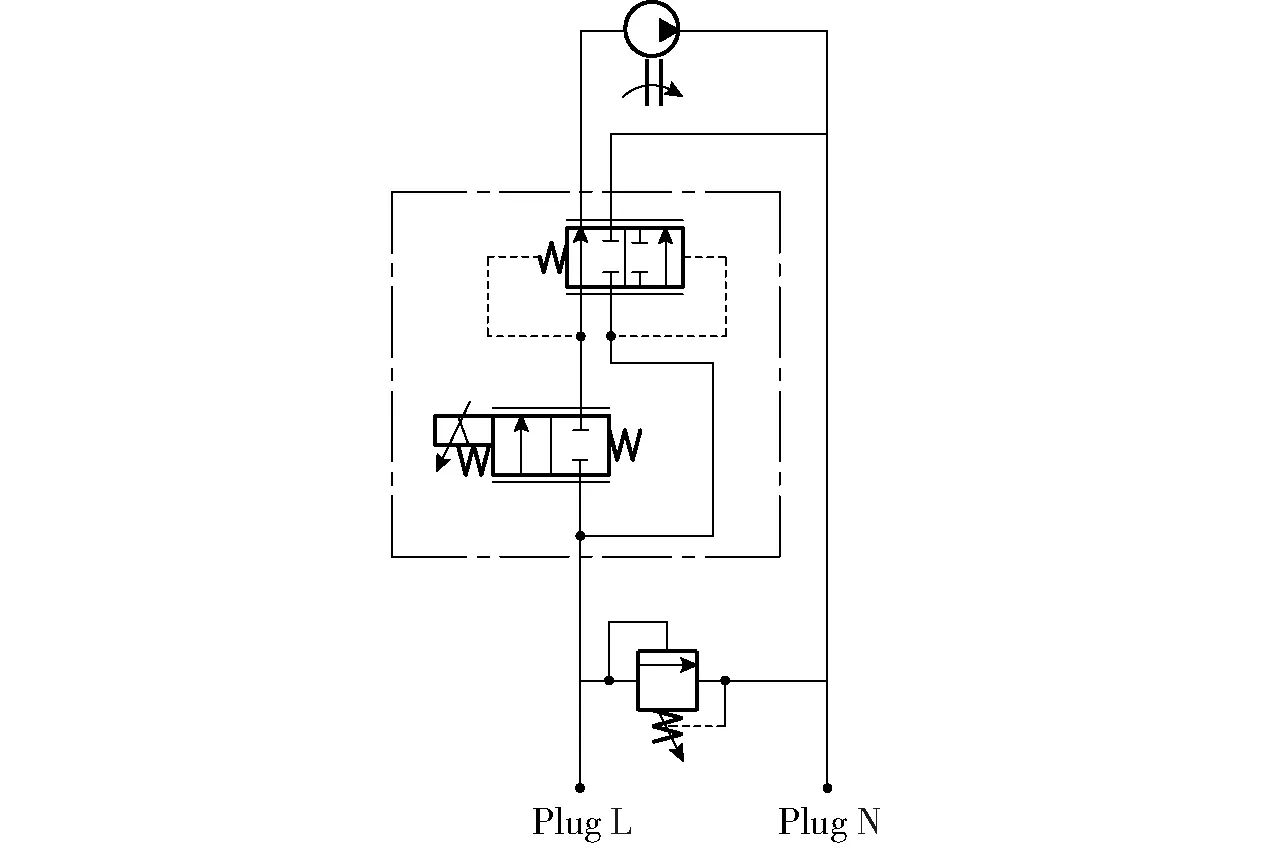
圖5 液壓系統(tǒng)原理圖Fig.5 Schematic diagram of hydraulic system
3.2.2電控系統(tǒng)
電控系統(tǒng)通過CAN總線實現(xiàn)與車載終端的實時通信[22],完成液壓馬達轉速的實時采集與精確控制,從而實現(xiàn)排肥過程的精準化控制。電控系統(tǒng)采用北京凱商公司的C102N型控制器,內(nèi)置16位微控制器模塊,設置為閉式回路控制,比例電磁鐵輸出經(jīng)過脈沖調(diào)制(PWM)實現(xiàn)閥門的高精度比例控制,施肥控制器接收到由車載終端下發(fā)的目標轉速指令,根據(jù)編碼器采集的液壓馬達實際轉速,通過PID算法[23-24]完成電液比例閥電流的計算與調(diào)節(jié)。
精量排肥控制系統(tǒng)采用標準PID算法,實時計算并控制液壓馬達轉速,根據(jù)液壓馬達通過流量與轉速關系求出比例系數(shù)在0.05左右,根據(jù)實際輸出轉速與轉速階躍響應數(shù)據(jù)分別對PID參數(shù)進行整定,最終確定比例系數(shù)Kp為0.055,積分時間常數(shù)Ti為0.003,微分時間常數(shù)Td為0.003,控制頻率為100 Hz。施肥控制器流程如圖6所示。被控對象為電液比例閥和液壓馬達。車載計算機計算的液壓馬達目標轉速Rin作為PID控制器的輸入信號,輸出信號Ir(t)為經(jīng)PID控制器計算得到的電磁閥輸出電流,輸出信號Rout為經(jīng)液壓驅(qū)動系統(tǒng)得到的液壓馬達實際轉速。控制器在執(zhí)行過程中,通過液壓馬達內(nèi)置編碼器實時測量馬達的轉速并反饋到CAN總線構成閉環(huán)控制,系統(tǒng)控制偏差e(t)為液壓馬達目標轉速Rin與實際轉速Rout差值。

圖6 排肥器轉速控制流程圖Fig.6 Flowchart of rotate speed control system
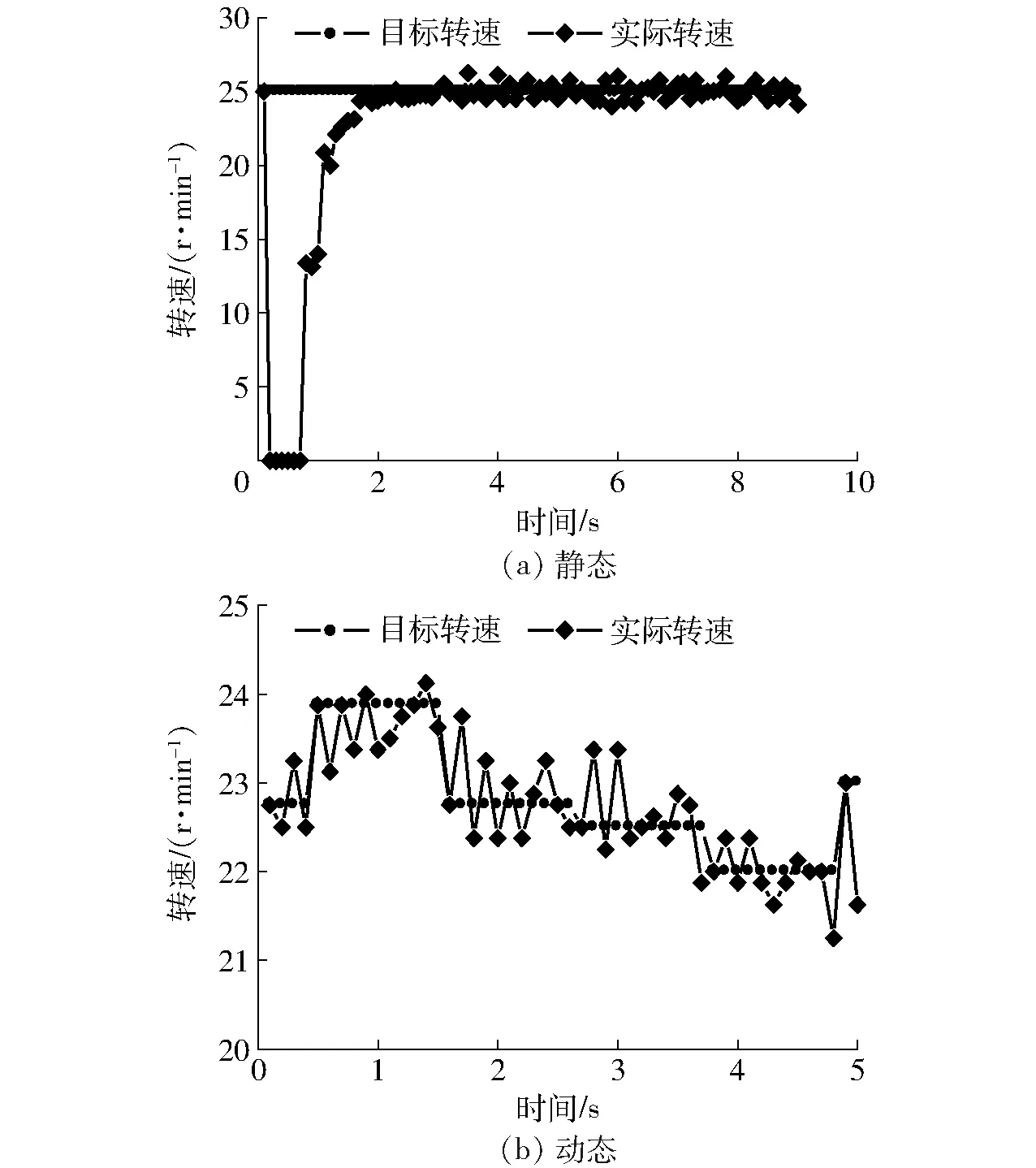
圖7 馬達轉速測試結果Fig.7 Test results of motor rotate speed
3.2.3PID控制精度分析
為檢驗PID控制精度,分別在靜態(tài)和動態(tài)條件下對馬達轉速進行了測試分析,結果如圖7所示。靜態(tài)測試時間為1 min,上位機下發(fā)轉速指令后,串口每隔100 ms回傳一次指令并記錄下馬達實時轉速,圖7a為轉速設定25 r/min時,記錄的馬達實時轉速。試驗結果表明,系統(tǒng)所用PID控制方法可實現(xiàn)馬達轉速精準控制,馬達轉速平均控制誤差為1.46%,最大控制誤差為6.5%。動態(tài)測試條件下,拖拉機前進速度為5 km/h,上位機根據(jù)拖拉機前進速度每隔1 s下發(fā)一次轉速指令,串口每隔100 ms回傳一次指令并記錄馬達實時轉速。圖7b為其中一組試驗結果,試驗結果表明,動態(tài)條件下,PID控制系統(tǒng)可以在0.2 s以內(nèi)完成轉速調(diào)節(jié),馬達轉速平均控制誤差為1.52%,最大控制誤差為10.2%。試驗結果表明,本系統(tǒng)可滿足精量排肥需求。
3.3 測控軟件設計
系統(tǒng)采用VMC1000型車載終端,利用MFC集成開發(fā)環(huán)境設計了精量排肥控制系統(tǒng)[25],系統(tǒng)包括數(shù)據(jù)采集模塊、參數(shù)配置模塊、系統(tǒng)標定模塊、追肥控制決策模塊、數(shù)據(jù)存儲模塊等功能模塊,軟件系統(tǒng)工作界面如圖8所示。系統(tǒng)主要完成:采集處理衛(wèi)星定位數(shù)據(jù);追肥機物理參數(shù)設置;追肥作業(yè)參數(shù)設置;通過CAN總線與施肥控制器進行通信;發(fā)送控制指令;接收施肥控制器上報的反饋信息等。系統(tǒng)根據(jù)模型
(2)
求得液壓馬達目標轉速為
(3)
式中S(t)——t時刻對應作業(yè)面積,hm2
Q0(t)——t時刻對應目標追肥量,kg/hm2
n0(t)——t時刻液壓馬達目標轉速,r/min
VG(t)——t時刻GNSS采集的拖拉機行駛速度,km/h
W——追肥機作業(yè)幅寬,m
Q0——單位面積追肥量,kg/hm2
NT——排肥管數(shù)量,個
q——排肥槽輪單轉排量,kg/r
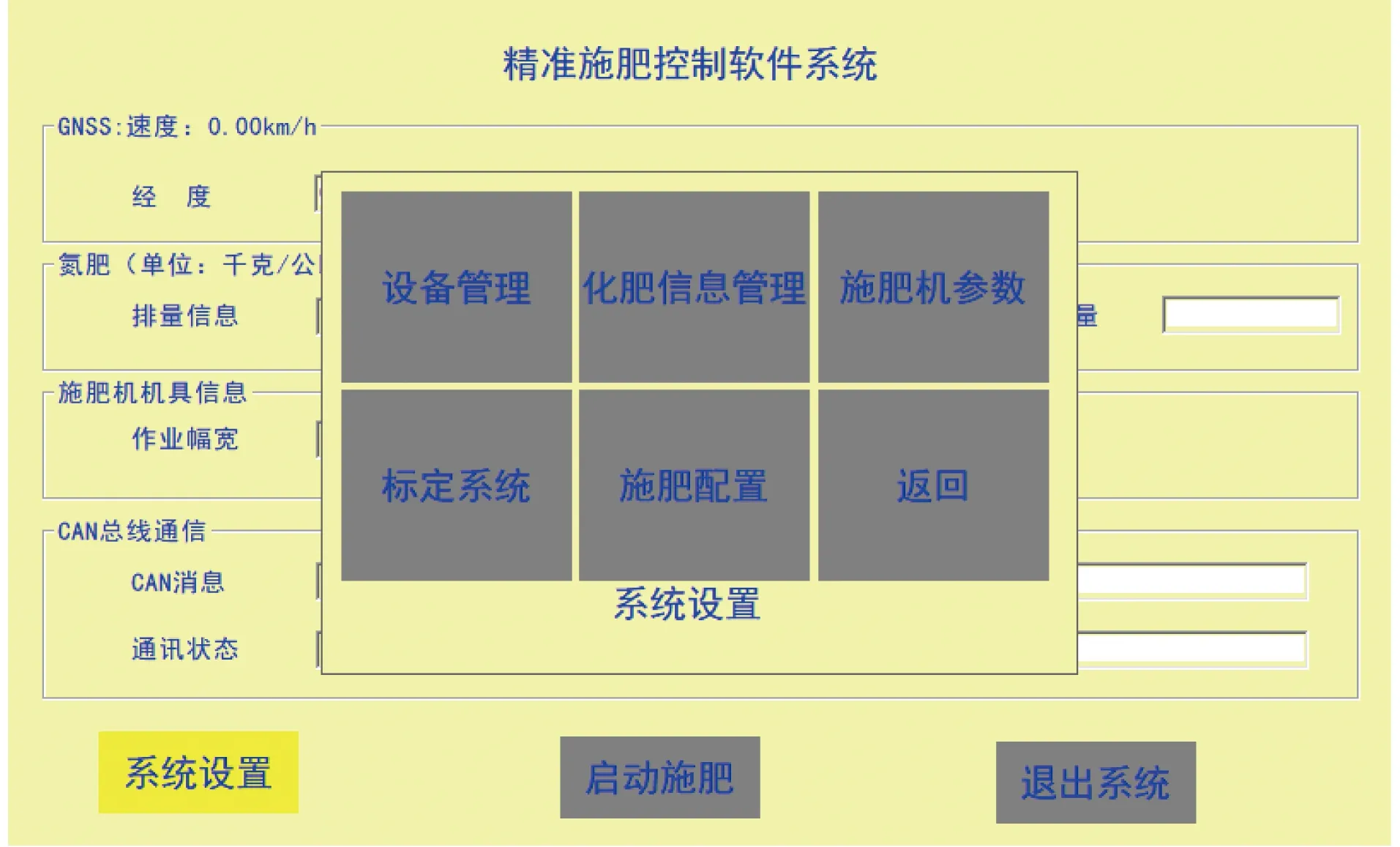
圖8 系統(tǒng)工作界面Fig.8 System display interface
車載終端通過CAN總線將液壓馬達目標轉速指令發(fā)送到施肥控制器,完成精量追肥控制過程。系統(tǒng)根據(jù)編碼器反饋的液壓馬達實際轉速,計算出實際追肥量為
(4)
式中Q(t)——t時刻實際追肥量,kg/hm2
n(t)——t時刻馬達實際轉速,r/min
4 精準對行系統(tǒng)設計
4.1 精準對行系統(tǒng)原理
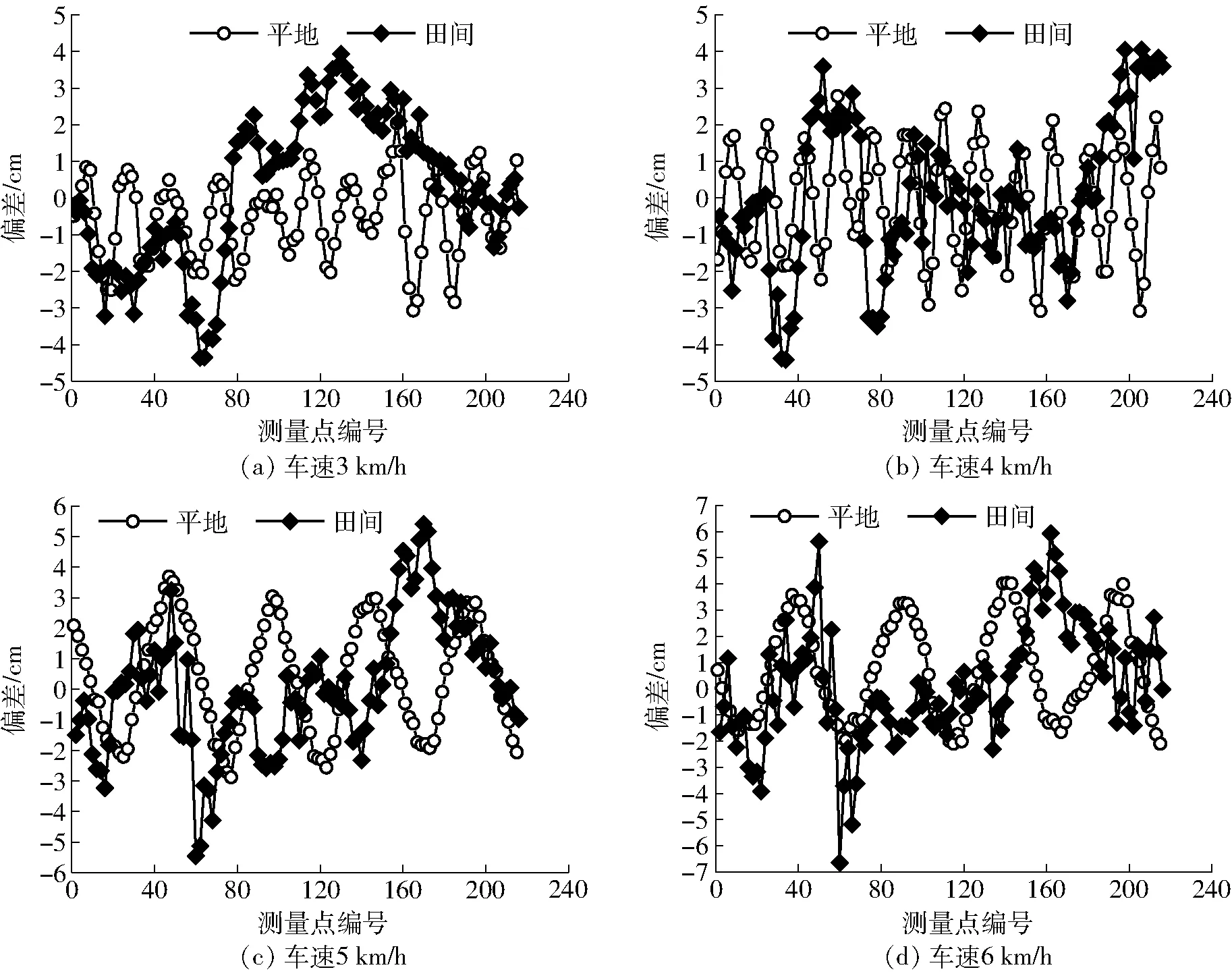
圖10 機具對行作業(yè)偏差Fig.10 Deviation of applicator row-following operation
由安裝自動導航系統(tǒng)的拖拉機牽引追肥機在小麥種植行中間位置行走,實現(xiàn)追肥機精準對行追肥作業(yè)。系統(tǒng)由以車載計算機和RTK-GNSS為核心的導航控制部分[26]以及轉向控制器部分、轉向液壓系統(tǒng)、執(zhí)行機構等部分組成。以追肥機上第4個雙圓盤開溝器所在小麥種植寬行的中心線生成導航基準線,系統(tǒng)根據(jù)拖拉機位置與導航基準線的偏差距離、拖拉機前進速度及當前車輪角度等信息,通過PID控制算法計算出當前車輪需要轉動角度,采用液壓系統(tǒng)驅(qū)動車輪轉動至目標角度,達到直線跟蹤的目的。該系統(tǒng)牽引追肥機進行追肥作業(yè)時,可以實現(xiàn)追肥機按指定路線精確作業(yè),最大直線跟蹤偏差為±2 cm,保證開溝深施追肥部件在相鄰小麥種植行間作業(yè),實現(xiàn)精準對行,最大限度降低了農(nóng)機作業(yè)壟間的重疊和遺漏,有效提高了作業(yè)效率,避免了開溝部件傷苗、傷根。精準對行系統(tǒng)原理如圖9所示。
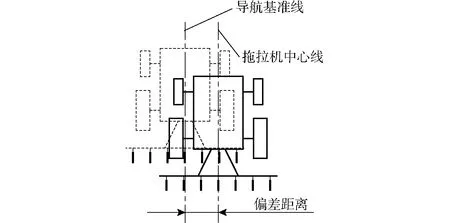
圖9 精準對行系統(tǒng)原理圖Fig.9 Schematic diagram of specific row following system
4.2 機具對行作業(yè)偏差分析
機具對行作業(yè)偏差來源包括拖拉機自動導航系統(tǒng)自身誤差,三點懸掛擺動和作業(yè)工況引起的機具振動等。試驗通過在追肥機具中心位置處安裝GNSS天線,拖拉機車頭安裝RTK-GNSS接收機來采集機具軌跡[27]。所用GNSS高精度接收機RTK靜態(tài)定位精度為10 mm+1 μm。試驗分別選在平坦的水泥路上和田間進行,將拖拉機速度控制在3~6 km/h,浮動范圍為±0.3 km/h,分別沿著導航線方向往返行駛100 m,每個速度下往返行駛3組,記錄下軌跡數(shù)據(jù)。以標準軌跡線為依據(jù),分別計算行駛速度在3~6 km/h時機具對行作業(yè)偏差結果,分析結果如圖10所示。
根據(jù)偏差分析結果可以看出,追肥機田間對行作業(yè)偏差范圍大于平地對行作業(yè)偏差,且行駛速度越快,機具對行作業(yè)偏差范圍逐漸增大。當行駛速度為3 km/h時,機具田間對行偏差范圍為-4.5~4.0 cm;行駛速度達到6 km/h時,機具對行偏差范圍為-6.7~6.0 cm。
以此分析結果和開溝器作業(yè)參數(shù)為依據(jù)確定追肥機適宜的追肥作業(yè)參數(shù),當追肥作業(yè)速度在3~6 km/h,追肥行大于20 cm時,可保證開溝盤準確行駛在小麥寬行間,避免開溝器對幼苗根部的切割損傷。
5 試驗
參照GB/T 20346.2—2006《施肥機械 試驗方法 第2部分:行間追肥機》和JB/T 7864—2013《中耕追肥機》對追肥機進行標定及田間試驗。
5.1 追肥均勻性測定
對追肥機在不同開度和轉速條件下的排量進行標定,選用尿素作為試驗材料,粒度范圍為0.85~2.80 mm,測定行數(shù)為7行,試驗共設6個排肥槽輪開度:10、12、15、18、20、24 mm,6種馬達轉速:10、15、20、25、30、40 r/min,用7個料桶在對應排肥管下對肥料進行收集,對應排量通過稱取料桶中肥量質(zhì)量求得。每個開度和轉速下重復3次試驗,共采樣756次。部分分析結果見表1。
表1為槽輪開度為12 mm和15 mm時,不同轉速下各槽輪排肥量數(shù)據(jù)。在槽輪開度不變的情況下,隨著槽輪轉速的提高,槽輪排肥量逐漸增大,各槽輪間平均排量的變異系數(shù)減小。在槽輪轉速一定的情況下,槽輪開度越大,平均排量逐漸增大,各槽輪平均排肥量變異系數(shù)逐漸減小。其他開度和轉速測定條件下,試驗結果有相同規(guī)律。因此以外槽輪作為追肥機計量工具時,應盡量選擇稍大的槽輪開度,以減小各槽輪間差異性[15]。

表1 各行排肥量一致性標定結果Tab.1 Consistency measurement results of each row fertilizer amount
5.2 田間試驗
為驗證追肥機作業(yè)性能,開展了田間追肥試驗。2017年4月初進行追肥試驗,小麥播種行距為(10+20) cm寬窄行,工作幅寬為2.1 m,追肥面積為0.3 hm2。2017年6月底收獲,田間試驗如圖11所示。

圖11 田間試驗Fig.11 Field experiments
追肥試驗時,拖拉機行駛速度為5 km/h,追肥深度10 cm,追肥量為200 kg/hm2,在20 cm寬行內(nèi)進行深施追肥試驗,機具對行作業(yè)偏差在±6 cm內(nèi),通過測量,雙圓盤開溝器開溝寬度范圍為8~12 cm,表層擾動范圍為23~30 cm。將試驗地塊劃分出10個2.1 m×100 m的小區(qū)域,對施肥量均勻性進行分析。結果見表2,施肥量偏差小于9%。
收獲后對小麥產(chǎn)量等進行了測定,以15 cm等行距播種,撒肥機表層撒施追肥225 kg/hm2處理為對照組,深施追肥組小麥產(chǎn)量為5 086.5 kg/hm2,對照組小麥產(chǎn)量為4 600 kg/hm2,每公頃追氮肥量減少25 kg左右,小麥產(chǎn)量每公頃提高486.5 kg左右。
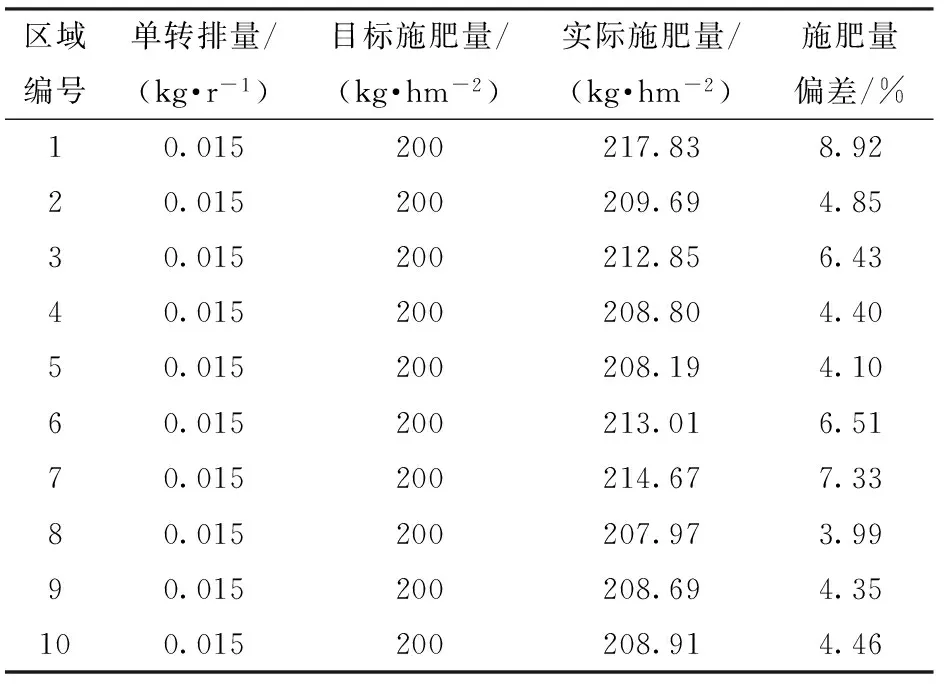
表2 田間試驗統(tǒng)計結果Tab.2 Statistical results of field experiments
6 結論
(1)針對小麥深施追肥的需求,設計了小麥精準對行深施追肥機,設計了配套精量排肥系統(tǒng)和精準對行系統(tǒng),通過合理調(diào)節(jié)PID參數(shù),實現(xiàn)了馬達轉速的穩(wěn)定控制,其中馬達轉速平均控制誤差為1.46%,最大控制誤差為6.5%;動態(tài)條件下,馬達轉速平均控制誤差為1.52%,最大控制誤差為10.2%;優(yōu)先選擇槽輪開度15 mm,保證了各行排肥量一致性。
(2)田間試驗表明,在(10+20) cm寬窄行種植模式下,作業(yè)速度為5 km/h,追肥量為200 kg/hm2,機具對行作業(yè)偏差在±6 cm以內(nèi),追肥量偏差小于9%,與撒肥機表層撒施對照組相比,每公頃減少氮肥施用量25 kg,小麥產(chǎn)量提高486.5 kg/hm2。
1高鳳菊, 呂金嶺. 尿素追肥深施對小麥產(chǎn)量及氮肥利用率的影響[J]. 耕作與栽培, 2006(1): 28.
2LIU Tianqi, FAN Daijia, ZHANG Xingxing, et al. Deep placement of nitrogen fertilizers reduces ammonia volatilization and increases nitrogen utilization efficiency in no-tillage paddy fields in central China[J]. Field Crops Research, 2015,184: 80-90.
3王弘菲. 冬小麥施用緩控釋氮肥的環(huán)境效應及其經(jīng)濟效益研究[D]. 保定: 河北農(nóng)業(yè)大學, 2012.
WANG Hongfei. Effects of applying slow control released nitrogen on the environmental and economic benefit of winter wheat[D]. Baoding: Hebei Agricultural University, 2012.(in Chinese)
4YUAN Weiling, YUAN Shangyong, ZHANG Feng, et al. Ammonia volatilization from soils fertilized with different nitrogen type and application method in germination and early seedling stages from the radish field[J]. Agricultural Science and Technology, 2016,17(4): 896-899.
5BANDAOGO A O, BIODJOKAZO F, YOUL S, et al. Effect of fertilizer deep placement with urea supergranule on nitrogen use efficiency of irrigated rice in Sourou Valley (Burkina Faso)[J]. Nutrient Cycling in Agroecosystems, 2015,102(1): 79-89.
6梁靖越, 張敬昇, 王昌全, 等. 控釋尿素對小麥籽粒產(chǎn)量和氮素利用率的影響[J]. 核農(nóng)學報, 2018,32(1): 157-164.
LIANG Jingyue, ZHANG Jingsheng, WANG Changquan, et al. Effect of controlled release urea on grain yield and nitrogen use efficiency in wheat[J]. Journal of Nuclear Agricultural Sciences, 2018,32(1): 157-164.(in Chinese)
7ROCHETTE P, ANGERS D A, CHANTIGNY M H, et al. Ammonia volatilization and nitrogen retention: how deep to incorporate urea?[J]. Journal of Environmental Quality, 2013,42(6): 1635-1642.
8霍中洋, 葛鑫, 張洪程, 等. 施氮方式對不同專用小麥氮素吸收及氮肥利用率的影響[J]. 作物學報, 2004,30(5): 449-454.
HUO Zhongyang, GE Xin, ZHANG Hongcheng, et al. Effect of different nitrogen application types on N-absorption and N-utilization rate of specific use cultivars of wheat[J]. Acta Agronomica Sinica, 2004,30(5): 449-454.(in Chinese)
9MAZID M, GAIHRE Y K, HUNTER G, et al. Fertilizer deep placement increases rice production: evidence from farmers’ fields in southern Bangladesh[J]. Agronomy Journal, 2016,108(2): 805-812.
10舒時富, 唐湘如, 羅錫文, 等. 機械定位深施超級稻專用肥提高土壤肥力和稻產(chǎn)量[J]. 農(nóng)業(yè)工程學報, 2013, 29(23): 9-14.
SHU Shifu, TANG Xiangru, LUO Xiwen, et al. Deep mechanized application of super rice special fertilizer increasing soil fertility and yield of super rice[J]. Transactions of the CSAE, 2013,29(23): 9-14. (in Chinese)
11朱兆良, 金繼運. 保障我國糧食安全的肥料問題[J]. 植物營養(yǎng)與肥料學報, 2013,19(2): 259-273.
ZHU Zhaoliang, JIN Jiyun. Fertilizer use and food security in China[J]. Plant Nutrition and Fertilizer Science, 2013,19(2): 259-273.(in Chinese)
12張福鎖, 王激清, 張衛(wèi)峰, 等. 中國主要糧食作物肥料利用率現(xiàn)狀與提高途徑[J]. 土壤學報, 2008,45(5): 915-924.
ZHANG Fusuo, WANG Jiqing, ZHANG Weifeng, et al. Nutrient use efficiencies of major cereal crops in China and measures for improvement[J]. Acta Pedologica Sinica, 2008,45(5): 915-924.(in Chinese)
13孫曉然, 孫綠, 趙長星, 等. 追肥深度對旱地小麥花后旗葉衰老特性及產(chǎn)量的影響[J]. 華北農(nóng)學報, 2015,30(增刊): 420-424.
SUN Xiaoran, SUN Lü, ZHAO Changxing, et al. Effects of fertilization application depth on senescence characteristics of flag leaf after anthesis and yield of dry-land wheat[J]. Acta Agriculturae Boreali-Sinica, 2015,30(Supp.): 420-424.(in Chinese)
14陳滿, 施印炎, 汪小旵, 等. 基于光譜探測的小麥精準追肥機設計與試驗[J/OL]. 農(nóng)業(yè)機械學報, 2015,46(5): 26-32. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150505&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.05.005.
CHEN Man, SHI Yinyan, WANG Xiaochan, et al. Design and experiment of variable rate fertilizer applicator based on crop canopy spectral reflectance[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015,46(5): 26-32. (in Chinese)
15王秀, 趙春江, 孟志軍, 等. 精準變量施肥機的研制與試驗[J]. 農(nóng)業(yè)工程學報, 2004,20(5): 114-117.
WANG Xiu, ZHAO Chunjiang, MENG Zhijun, et al. Design and experiment of variable rate fertilizer applicator[J]. Transactions of the CSAE, 2004,20(5): 114-117.(in Chinese)
16陳立平, 黃文倩, 孟志軍, 等. 基于CAN總線的變量施肥控制器設計[J]. 農(nóng)業(yè)機械學報, 2008,39(8): 101-104,185.
CHEN Liping, HUANG Wenqian, MENG Zhijun, et al. Design of variable rate fertilization controller based on CAN bus[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008,39(8): 101-104,185. (in Chinese)
17王金武, 潘振偉, 周文琪, 等. SYJ-2型液肥變量施肥機設計與試驗[J/OL]. 農(nóng)業(yè)機械學報, 2015,46(7): 53-58. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150708&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.07.008.
WANG Jinwu, PAN Zhenwei, ZHOU Wenqi, et al. Design and test of SYJ-2 type liquid variable fertilizer[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015,46(7): 53-58. (in Chinese)
18姬長英, 周俊. 農(nóng)業(yè)機械導航技術發(fā)展分析[J/OL]. 農(nóng)業(yè)機械學報, 2014,45(9): 44-54. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140908&flag=1. DOI:10.6041/j.issn.1000-1298.2014.09.008.
JI Changying, ZHOU Jun. Current situation of navigation technologies for agricultural machinery[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014,45(9): 44-54.(in Chinese)
19NKEBIWE P M, WEINMANN M, BAR-TAL A, et al. Fertilizer placement to improve crop nutrient acquisition and yield: a review and meta-analysis[J]. Field Crops Research, 2016, 196: 389-401.
20PAN Shenggang, WEN Xiangcheng, WANG Zaiman, et al. Benefits of mechanized deep placement of nitrogen fertilizer in direct-seeded rice in South China[J]. Field Crops Research, 2017, 203: 139-149.
21FENG Huimin, GAO Nana, LI You, et al. Effects of topdressing depth and row spacing on the SPAD and plant height of winter wheat[C]∥2017 ASABE Annual International Meeting, ASABE Paper 1700924,2017.
22付衛(wèi)強, 孟志軍, 黃文倩, 等. 基于CAN總線的變量施肥控制系統(tǒng)[J]. 農(nóng)業(yè)工程學報, 2008,24(增刊2): 127-132.
FU Weiqiang, MENG Zhijun, HUANG Wenqian, et al. Variable rate fertilizer control system based on CAN bus[J]. Transactions of the CSAE, 2008,24(Supp.2): 127-132. (in Chinese)
23梁春英, 呂鵬, 紀建偉, 等. 基于遺傳算法的電液變量施肥控制系統(tǒng)PID參數(shù)優(yōu)化[J/OL]. 農(nóng)業(yè)機械學報, 2013,44(增刊1): 89-93,88. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2013s117&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2013.S1.017.
LIANG Chunying, Lü Peng, JI Jianwei, et al. Optimization of PID parameters for electro-hydraulic variable rate fertilization system based on genetic algorithm[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013,44(Supp.1): 89-93,88. (in Chinese)
24陳滿, 魯偉, 汪小旵, 等. 基于模糊PID的冬小麥變量追肥優(yōu)化控制系統(tǒng)設計與試驗[J/OL]. 農(nóng)業(yè)機械學報, 2016,47(2): 71-76. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160210&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2016.02.010.
CHEN Man, LU Wei, WANG Xiaochan, et al. Design and experiment of optimization control system for variable fertilization in winter wheat field based on fuzzy PID[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016,47(2): 71-76. (in Chinese)
25左興健, 武廣偉, 付衛(wèi)強, 等. 風送式水稻側深精準施肥裝置的設計與試驗[J]. 農(nóng)業(yè)工程學報, 2016, 32(3): 14-21.
ZUO Xingjian, WU Guangwei, FU Weiqiang, et al. Design and experiment on air-blast rice side deep precision fertilization device[J]. Transactions of the CSAE, 2016,32(3): 14-21. (in Chinese)
26劉兆祥, 劉剛, 籍穎, 等. 基于自適應模糊控制的拖拉機自動導航系統(tǒng)[J]. 農(nóng)業(yè)機械學報, 2010,41(11): 148-152,162.
LIU Zhaoxiang, LIU Gang, JI Ying, et al. Autonomous navigation system for agricultural tractor based on self-adapted fuzzy control[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010,41(11): 148-152,162. (in Chinese)
27吉輝利, 王熙. 農(nóng)機衛(wèi)星定位導航精度評估方法研究[J]. 農(nóng)機化研究, 2016,38(11): 242-245,262.
JI Huili,WANG Xi.The research of agricultural machinery is about satellite navigation accuracy of the evaluation method[J]. Journal of Agricultural Mechanization Research,2016,38(11):242-245,262.(in Chinese)
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08