新體制SAR三維成像技術研究進展
2018-04-17 08:18:54王彥平譚維賢吳一戎
雷達學報 2018年6期
關鍵詞:實驗
洪 文 王彥平 林 赟 譚維賢 吳一戎
(微波成像技術國家級重點實驗室 北京 100190)
(空間信息處理與應用系統技術中國科學院重點實驗室 北京 100190)
(中國科學院電子學研究所 北京 100190)
1 引言
合成孔徑雷達(Synthetic Aperture Radar,SAR)采用微波波段,具有全天時全天候高分辨成像能力。SAR通常發射大時間帶寬積信號,如線性調頻信號,通過脈沖壓縮,獲得距離向高分辨率。其平臺通常沿直線飛行,天線側視照射觀測場景,以均勻的時間間隔發射信號,利用平臺與目標之間的相對運動,形成多普勒帶寬,實現方位向的高分辨率。近20年來,機載、星載SAR的系統技術和成像處理技術發展飛速,SAR已成為對地觀測的最重要手段之一。
距離-多普勒成像是SAR的基本成像原理,目標聚焦于零多普勒-最近斜距處,這使得常規的直線飛行SAR僅具備2維成像能力,獲取的是3維場景在方位-斜距平面的2維投影圖像。SAR 2維圖像僅反映方位和斜距信息,無法獲得3維位置信息,也無法對同一距離和方位、但不同高度的目標進行分離。SAR 2維圖像存在幾何形變和疊掩問題,尤其在地形起伏區域,如山區,或具有垂直結構的區域,如森林區、城市區等,圖像的頂底倒置、透視縮短、疊掩等問題尤為嚴重,屬于SAR的困難測繪區,難以準確反映目標的幾何和散射信息,給SAR圖像判讀解譯帶來極大困難。
SAR 3維成像突破了常規SAR斜距-方位2維頻率信息獲取局限,通過孔徑設計,將場景的頻率信息獲取拓展到3維,能夠實現3維分辨,獲取觀測場景散射中心在3維空間中的分布,從根本上解決疊掩問題和透視縮短、頂底倒置等幾何形變問題,更直觀、準確地描述3維觀測場景的幾何和散射信息,為SAR成像技術帶來了更廣闊的應用領域。
SAR 3維成像研究開始于20世紀90年代初,最初在地面可控實驗環境下開展機理、算法與實驗研究,最具代表性的包括:美國海上作戰中心(Naval Surface Warfare Center, NSWC)的Knaell[1]對曲線SAR 3維成像機理和算法進行了研究;美國紐約州立大學(State University of New York, SUNY)的Soumekh等人[2,3]對圓跡SAR和多基線圓跡SAR 3維成像開展了暗室實驗數據獲取;歐洲執行委員會聯合研究中心(Joint Research Centre of The European Commission, JRC)的Fortuny等人[4,5]研究了柱面孔徑、球面孔徑等多種SAR 3維成像模式。上述學者都通過可控實驗獲得了典型目標的3維圖像,驗證了SAR 3維成像的可行性,奠定了SAR 3維成像的理論基礎。20世紀90年代末,德國宇航中心(German Aerospace Center, DLR)開展了世界首次機載多基線SAR層析成像試驗[6],采用L波段E-SAR系統在不同高度多次飛行,在方位合成孔徑的基礎上,形成了俯仰方向的合成孔徑,實現了自然場景散射中心在高度維的分辨,是自然場景3維成像效果的首次展示,為SAR對地觀測打開了新的視野,是SAR成像技術發展的重要里程碑。
SAR 3維成像有多種實現方式,可以是曲線孔徑、平面孔徑、曲面孔徑等,這些孔徑以不同的形式將傳統直線孔徑寬帶SAR的距離-方位2維頻率信息獲取拓展到3維,實現對觀測場景的3維分辨。面向實際應用需求和當下數據獲取的可實現性,在對地觀測領域發展出了一系列典型的SAR 3維成像工作模式,如圖1所示,包括:(1)適用于飛機、衛星平臺的多基線層析SAR(Multi-Baseline SAR, MBSAR),主要應用方向為植被區的垂直結構獲取、城市建筑3維信息提取;(2)適用于飛機平臺的陣列下視SAR(Downward-Looking SAR, DLSAR),利用陣列在垂直于飛行航跡的方向形成實孔徑,實現跨航向的分辨,獲取平臺正下方觀測區域的3維圖像,主要應用方向為飛機輔助起飛著陸、城市3維測繪等;(3)適用于飛機平臺和地球同步軌道衛星平臺的圓跡SAR(Circular SAR, CSAR)和多基線圓跡SAR(Multi-Baseline CSAR, MBCSAR),通過平臺圍繞觀測區域作圓周飛行,獲取觀測區域360°全方位3維散射信息,主要應用方向為重點目標的精細3維成像。上述新體制SAR 3維成像模式的獨特應用潛力已在國內外多次機載、星載實驗中得到初步展示。隨著數據獲取和數據處理技術的不斷進步,SAR 3維成像技術將得到快速發展,并逐步邁向應用,同時,更多新體制SAR 3維成像模式也將不斷涌現,未來在森林遙感、城市遙感、偵察監視等民用和軍事應用領域發揮重要作用。
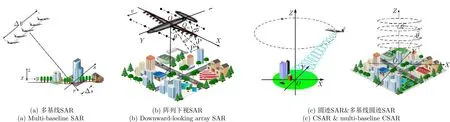
圖1 典型SAR 3維成像模式Fig. 1 Typical 3-D SAR imaging mode
本文對國內外SAR 3維成像技術的研究進展進行概述,首先介紹了SAR 3維成像的基本概念和典型SAR 3維成像模式,然后分析了國內外研究進展,重點對作者所在研究團隊的研究成果進行了闡述,最后對SAR 3維成像技術進行了總結和展望。
2 3維SAR的概念
SAR 3維成像是指通過發射寬帶信號、形成合成孔徑或實孔徑等方式獲取被觀測對象在3維波數空間中的3維頻率信息,且在3個正交方向都具有一定帶寬,通過成像處理能夠獲得3維分辨圖像的成像模式。
SAR成像觀測可由下圖的信息球來統一表達[7],如圖2所示。該信息球對3維波數域角度SAR信息獲取進行了表達,圖中,半徑為發射信號頻率,方位角和俯仰角為雷達相對于觀測目標的觀測視角,分別代表了SAR的觀測頻率和觀測角度。觀測頻率由SAR的發射信號決定,僅能獲取有限的頻率帶寬內的目標信息,而觀測角度分布的差異則體現了各種SAR成像模式的不同之處。下面將在信息球中介紹典型SAR 3維成像模式。
A對應于多基線SAR 3維成像,在一定高度對觀測對象進行多次飛行觀測,在形成航跡向合成孔徑的基礎上,又形成了高度向合成孔徑,從而構成一個平面矩形孔徑,實現對觀測對象的3維分辨,多應用于對地觀測。
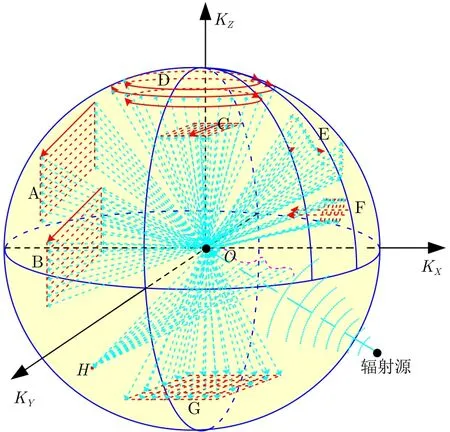
圖2 信息球Fig. 2 Information sphere
B對應于平視條件下的多基線SAR 3維成像,即觀測位于平臺正前方,是A的一種特例,主要在微波暗室可控環境中進行,在目標高精度診斷、人體表面微波成像等方面具有廣泛應用。
C對應于陣列下視SAR 3維成像,跨航向陣列實孔徑與航跡向合成孔徑結合,形成了水平的矩形合成孔徑。其平臺主要為飛機,在城市測繪、軍事偵查中具有重要的應用潛力。
D對應于圓跡SAR 3維成像,通過平臺的圓周運動獲取同一入射角,不同方位角的目標信息,合成孔徑為圓形。在不同高度進行相同半徑的圓周運動時,則形成圓柱曲面形合成孔徑。主要平臺為飛機、地基、地球同步軌道平臺等,在高分辨率軍事偵查、近景人體表面微波成像方面具有廣泛應用潛力。
E對應于曲線SAR 3維成像,通過平臺非規則曲線運動,形成曲線合成孔徑,圓跡SAR是曲線SAR中的特例。
F對應于前視觀測模式,將陣列天線實孔徑與合成孔徑相結合,對前下方區域進行觀測,形成了與水平面有一定夾角的矩形合成孔徑。主要平臺為飛機或導彈等,在應急救援、輔助導航等方面具有重要應用潛力。
G是一種對空觀測天線陣列,將合成孔徑和實孔徑相結合,對空中目標進行實時監測,在預警和目標跟蹤等方面具有重要應用潛力。
本文對目前最具代表性的3維成像模式:多基線SAR,陣列下視SAR,圓跡SAR和多基線圓跡SAR開展了3維分辨理論研究,下面分別給出以上3維成像模式的頻譜支撐集和點擴展函數[8]。
(1) 多基線SAR數據采集位置構成的平面合成孔徑位于目標的側上方,如圖3所示,在3維波數域中的頻譜支撐集近似為矩形體,且呈一定傾角。對應的點擴展函數為有一定傾角的3維sinc函數,3維分辨率分別由斜距、方位、垂直于斜距方向,這3個正交方向的信號帶寬決定。
(2) 陣列下視SAR數據采集位置構成的平面合成孔徑位于目標的正上方,頻譜支撐集近似為矩形體,如圖4所示,對應的點擴展函數為3維sinc函數。3維分辨率由斜距、陣列向、航跡向3個正交方向的信號帶寬決定。
(3) 圓跡SAR數據采集位置構成的圓周形合成孔徑位于目標的正上方,頻譜支撐為圓臺曲面,如圖5所示。其點擴展函數在水平面上為貝塞爾函數,在高度向上近似為sinc函數。平面分辨率由圓臺曲面在水平面的圓環形投影的直徑決定,理論值可達亞波長量級,高程分辨率由圓臺曲面在垂直向的投影帶寬決定。由于其頻譜支撐集為曲面,具有稀疏性,點擴展函數的旁瓣水平較高。多基線圓周SAR的頻譜支撐集為扇環繞kz軸旋轉而成的體,如圖6所示,可有效改善頻譜稀疏性,降低旁瓣水平。
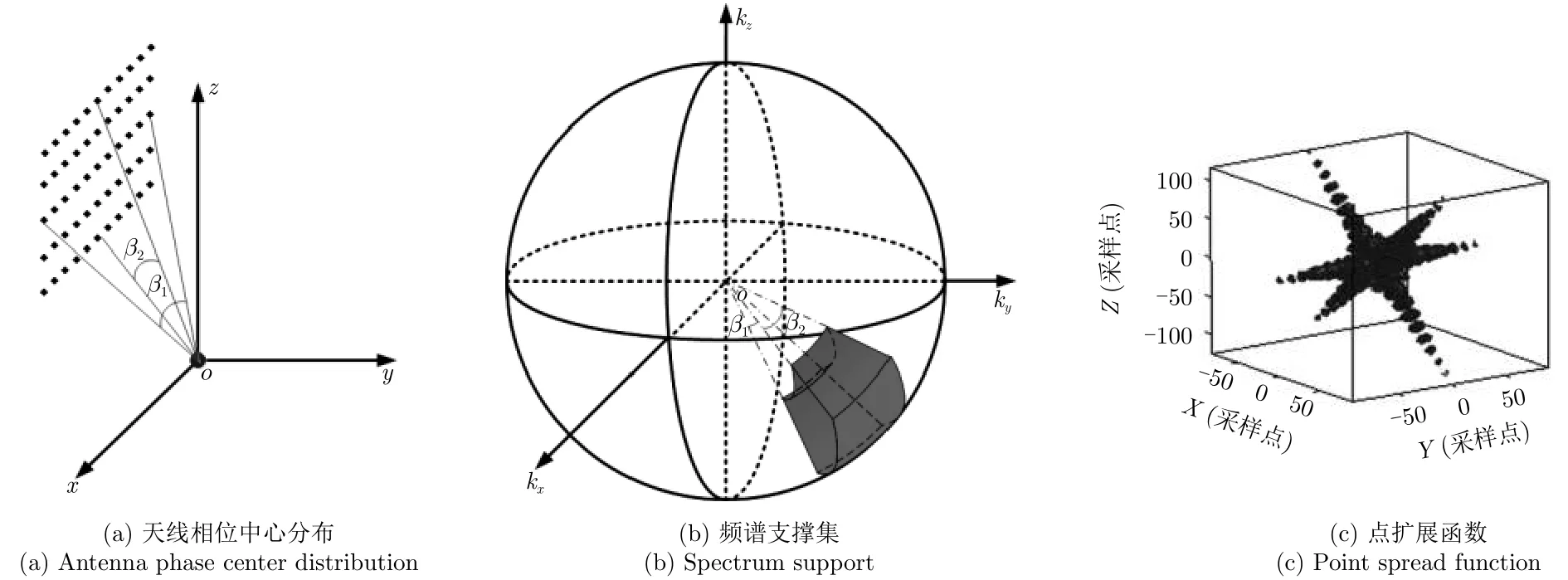
圖3 多基線SAR的數據采集天線相位中心分布、頻譜支撐集和點擴展函數Fig. 3 The antenna phase center distribution, spectrum support and point spread function of multi-baseline SAR
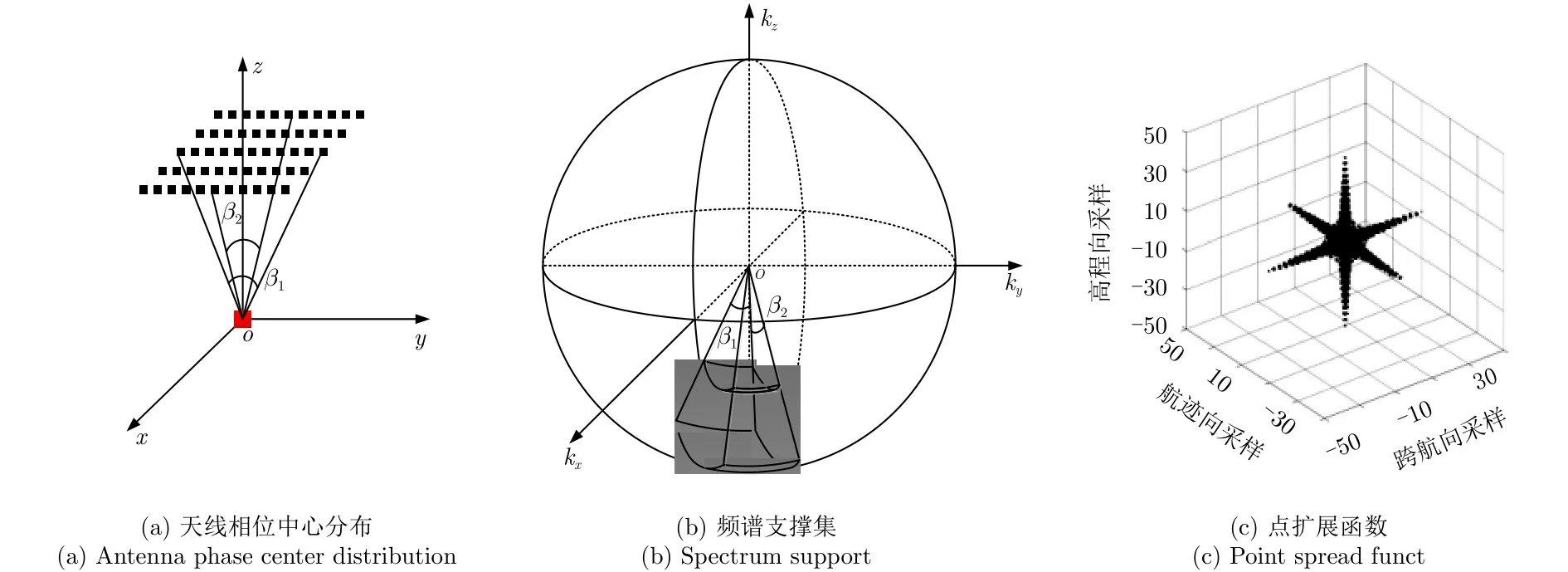
圖4 陣列下視SAR的數據采集天線相位中心分布、頻譜支撐集和點擴展函數Fig. 4 The antenna phase center distribution, spectrum support and point spread function of downward-looking array SAR
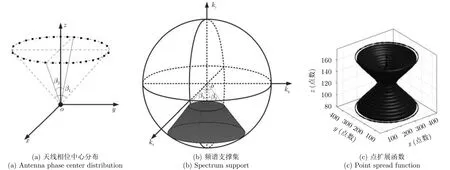
圖5 圓跡SAR的數據采集天線相位中心分布、頻譜支撐集和點擴展函數Fig. 5 The antenna phase center distribution, spectrum support and point spread function of circular SAR
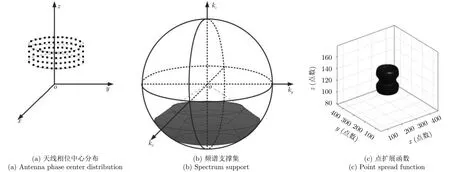
圖6 多基線圓跡SAR的數據采集天線相位中心分布、頻譜支撐集和點擴展函數Fig. 6 The antenna phase center distribution, spectrum support and point spread function of multi-baseline circular SAR
SAR 3維成像的本質是對目標的觀測在3個正交方向都具有頻率帶寬,3維分辨率由這3個正交方向的帶寬決定。上述典型3維成像模式在發射寬帶信號的基礎上,通過數據采集天線相位中心的曲線分布、曲面分布、平面分布,實現頻譜支撐集的3維分布。SAR 3維成像還有其他多種方式,例如,僅發射單頻信號,通過俯仰和方位的多角度觀測,在3維波數域中以發射信號為半徑的球面上,形成曲面支撐集,理論上也能實現3維分辨。
3 國內外研究現狀
SAR 3維成像的研究始于20世紀90年代初,美國和歐洲的專家學者,包括Knaell, Soumekhm,Chan T K, Fortuny等人[1-5,9]對圓形孔徑、曲線孔徑、曲面孔徑等多種形式的SAR 3維成像模式開展了成像機理、3維分辨率理論和成像算法的研究,通過暗室實驗驗證,獲得了簡單目標的3維分辨圖像,驗證了SAR 3維成像的可行性,奠定了SAR 3維成像的理論基礎。隨著機載SAR平臺的發展,2000年左右,德宇航利用機載實驗系統E-SAR開展了多基線3維成像實驗[6],獲取了自然場景的3維分辨圖像,驗證了SAR 3維成像在對地觀測中的可行性和應用潛力。此后,在對地觀測領域,面向實際應用需求和數據獲取的可實現性,發展出了一些列SAR 3維成像模式,主要包括:多基線SAR、陣列下視SAR、圓跡SAR和多基線圓跡SAR。本文后續將重點對上述典型3維成像模式的研究進展進行介紹。
經過20多年的快速發展,SAR 3維成像技術日趨成熟,并逐步邁向應用,且隨著SAR技術領域的不斷進步,新的SAR 3維成像模式不斷涌現,一直以來,SAR 3維成像技術是國際研究熱點,國外的歐空局(European Space Agency, ESA)、德宇航、德國弗勞恩霍夫高頻物理與雷達技術研究所(Fraunhofer Institute for High Frequency Physics and Radar Techniques, FHR)、法國宇航局(The French Aerospace Lab, ONERA)、瑞典國防研究院(Swedish Defense Research Agency, FOI)、意大利米蘭理工大學(Polytechnic University of Milan)、意大利那不勒斯大學(University of Naples Parthenope)等高校和機構引領了SAR 3維成像技術的發展。我國在新體制SAR 3維成像技術的理論和成像處理技術方面處于國際領先地位,中國科學院電子學研究所、清華大學、中國民航大學、中科院空間中心、電子科技大學、北京航空航天大學、空軍工程學院、國防科技大學、上海交通大學、香港中文大學、中科院對地觀測與數字地球科學中心、武漢大學、西安電子科技大學、南京航空航天大學、復旦大學、中國航天科工二十三所等多家高校和研究機構都在持續開展新體制SAR 3維成像技術研究。
多基線SAR方面,國際先進技術已具備滿足3維成像要求的機、星載多基線數據獲取能力,成功實現了城市的3維重建和植被區的垂直結構獲取。我國也已具備機、星載多基線SAR的3維成像處理能力,已利用國外機、星載數據實現了城市的3維重建和植被區的垂直結構獲取。在數據獲取方面,我國自主研發的航空遙感機載平臺,具備多航過數據采集能力,目前處于測試和科學實驗階段;2016年發射的高分三號星載SAR的重軌數據的相干性已得到初步驗證,上述平臺都將為多基線SAR研究提供數據。
陣列下視SAR方面,國際上頂尖機構已成功研制了線陣系統,并安裝于小型無人機平臺,開展了飛行實驗,但3維成像結果未見公布。我國多家高校和研究機構成功研制了陣列天線,開展了地面實驗,獲取了下視3維圖像,然而,將陣列搭載于飛機平臺實現下視3維成像,還面臨受限于陣列尺寸跨航向分辨率低、下視陣列多通道3維運動補償困難等技術難題,目前還未見實際機載陣列下視SAR的3維成像結果。
圓跡SAR和多基線圓跡SAR方面,國外于2004年左右已有機載圓跡SAR實驗報道,但未見360°圖像公布,2011年,中科院電子所與德宇航同期獲得機載圓跡SAR全方位圖像,國內外多家機構已具備圓跡SAR數據獲取和成像處理能力,然而,隨著頻段增高,其運動補償難度大大增加,且成像對地形更為敏感,高波段圓跡SAR成像技術仍在發展中。國外已公布了機載多基線圓跡SAR 3維成像結果,國內雖已開展了多基線圓跡SAR數據獲取實驗,但還未見公開成像結果。
下面,具體對上述典型SAR 3維成像模式的主要研究進展進行介紹。
3.1 多基線SAR
20世紀90年代末,德國宇航局Reigber等人提出了多基線SAR 3維成像的概念,并利用機載SAR實驗系統E-SAR開展了世界首次機載3維成像實驗,給出了多基線數據的相位校正預處理方法,并利用譜估計的方法解決了基線非規則、欠采樣帶來的柵瓣問題,獲得了距離向2.3 m、方位向1 m和高程向3 m分辨率的L波段3維微波圖像。他們公開了高程-地距2維剖面圖,圖中散射中心在高度向可分辨,可以準確地獲得角反射器、汽車、建筑等目標的高度信息[6]。而在植被區,由于L波段的穿透性,樹冠、樹干和地面各分層結構均有散射回波,3維成像能夠獲得植被的垂直結構信息。首次的機載SAR 3維成像實驗展示了SAR 3維成像在對地觀測中的重要應用潛力。
此后,陸續有星載多基線SAR實驗報道,澳大利亞阿德雷德大學的She等人[10]利用ERS-1(European Remote sensing Satellite)星載SAR對德國波恩地區的9景重航過復圖像進行3維成像。2005年,Fornaro等人[11]采用ERS-1/2 30條重航過數據,對San Paolo露天運動場進行3維成像,后又利用63條重航過數據獲得了該地區效果更好的3維成像結果[12]。這些實驗驗證了星載SAR重航過的3維成像能力,但是受基線跨度和航跡數目的限制,經典譜估計方法的高程向重建結果存在分辨率較低、旁瓣較高和模糊較嚴重等問題。
在城市測繪應用方面,Zhu等人[13]于2010年提出了基于L1 范數正則化的星載多基線SAR成像方法,利用25 景TerraSAR-X 1 m分辨率聚束數據,對柏林城區進行3維重建。基于L1 范數正則化的稀疏重建方法利用了城市中建筑散射中心分布在垂直斜距面方向的稀疏性,相比于譜估計方法具有更強的解疊掩能力,即高程向的超分辨能力。通過稀疏重建處理。意大利那不勒斯大學的Budillo等人[14]也在同期開展了同一研究,先后利用15 景的ERS1-2數據與13 景的COSMO-SKYMED數據,分別對城市體育場及城市建筑群進行了基于L1 范數正則化的稀疏3維成像。
在森林監測應用方面,歐空局預計于2021年發射世界首顆P波段星載SAR-BIOMASS,多基線SAR是其主要工作模式。任務是利用P波段的穿透性及衛星重航過的3維成像能力,獲取植被區的垂直結構,估計生物量,為氣候等環境變化提供與碳排放相關的數據。針對這一衛星任務,歐空局從2008年開始,開展了一系列機載BIOMASS實驗。在植被區多基線3維成像方面,針對森林區域散射中心在垂直視線方向分布不稀疏的情況,德國宇航局Aguilera等人[15]首先利用小波基對高程向進行稀疏表征,然后通過基于L1正則化的稀疏重建技術實現了森林區域的稀疏3維重建,有效降低了高程向模糊,提升了3維成像質量。隨后,Aguilera等人[16]還將稀疏重建技術應用于極化多基線SAR 3維成像中,通過解決混合范數最優化問題,實現了同時對不同極化通道的高分辨率3維重建。
3.2 陣列下視SAR
1999年,德國宇航局的Gierull[17]提出了機載下視成像雷達的概念,利用跨航向的陣列實孔徑和航跡向合成孔徑,形成2維孔徑,僅需發射單頻信號即可實現正下方觀測場景的2維成像,避免了常規SAR存在的左右模糊和陰影等問題。
2004年,法國宇航局的Giret等人[18]以寬帶發射信號代替單頻信號,通過增加距離向分辨,將機載下視成像雷達的概念從2維拓展到3維。2006年,該研究機構Nouvel等人[19]開始研制Ka波段陣列下視DRIVE實驗系統。該系統具有側視2維觀測和下視3維觀測2種工作模式。2006年至2010年,該機構利用DRIVE系統開展了下視機載飛行試驗,并公開了1 km高度平面上的航跡-跨航2維成像結果,但相關3維成像結果未曾公開。
2006年,德國FHR開始研制機載陣列雷達系統ARTINO[20]。該系統采用Ka波段FMCW工作體制以降低系統對功率和體積的要求,并采用兩端密集發射-中間稀疏接收的稀疏線陣構型,安裝于小型無人機平臺。他們于2010年開展了首次數據采集試驗,但相關實驗結果并未公布。
2013年,中科院電子所研制了Ku波段全極化塔吊下視陣列實驗系統,開展了首次塔吊陣列下視實驗,獲取了地面目標3維圖像。詳見本文的第4節。
3.3 圓跡SAR &多基線圓跡SAR
2004年開始,法國宇航局(ONERA)、德國宇航局(DLR)、瑞典國防研究院(FOI)以及中科院電子所等研究機構相繼開展了圓跡SAR機載飛行試驗,挖掘圓跡SAR全方位觀測在對地觀測中的應用優勢。
2007年,法國宇航局利用圓跡SAR的多角度觀測幾何獲取了N?mes城區斗獸場附近區域的數字高程模型(Digital Elevation Model, DEM)[21],精度達2 m。
2009年,德國宇航局利用E-SAR系統,開展了L波段全極化機載圓跡SAR飛行實驗,并于2011年IGARSS會議上公開了全極化360°圓跡SAR圖像,這也是圓跡SAR對地觀測全方位高分辨成像效果的首次展示[22]。2011年,中科院電子所開展了國內首次機載圓跡SAR實驗,與德宇航同期獲取了P波段全極化360°圓跡SAR圖像。相比于常規SAR單一角度觀測圖像,圓跡SAR圖像在分辨率、相干斑抑制、目標幾何特征完整性等方面的質量大大提升,顯示了更為精細和豐富的地物信息。
在對地觀測中,由于目標的各向異性散射特性,單軌跡圓跡SAR的3維分辨成像能力較弱。早在90年代,美國紐約州立大學的M. Soumekh[3]就提出了ECSAR(Elevation CSAR)模式,即多基線圓跡SAR模式,在全方位觀測的同時,解決各向異性目標的疊掩問題。2013年,德宇航提出了全息SAR(holographic SAR)的概念[23],也是通過多基線圓跡SAR實現的,并在林區開展了L波段全極化多基線圓跡SAR實驗,利用19條軌跡數據處理獲得了林區的3維圖像。
4 研究團隊3維成像技術研究
在國家自然科學基金項目、國家預研項目的支持下,中科院電子所微波成像新概念新體制新技術研究團隊持續開展新體制SAR 3維成像技術研究,是國內最早開展相關研究的團隊。相關項目支持主要有:國家自然科學基金(以下簡稱NSFC)青年基金項目“多基線SAR層析的解析建模與數據處理技術”[2007-2009],國家863計劃項目“下視陣列天線3維成像合成孔徑雷達”[2007-2010], NSFC杰青項目“合成孔徑雷達3維成像”[2008-2011], NSFC重大項目“多維度微波成像基礎理論與關鍵技術”[2009-2012],總裝重點探索項目“地球同步軌道圓跡SAR”[2010-2012],高分專項“分布式陣列SAR”[2011-2017], NSFC青年基金“人體表面微波極化全息成像方法與實驗”[2011-2013],中科院重點部署項目創新團隊國際合作伙伴計劃“陣列天線3維稀疏微波成像方法與實驗研究”[2013-2016],NSFC青年基金“基于回波數據的圓跡SAR高精度3維成像處理方法研究”[2013-2015], NSFC面上項目“機載陣列下視SAR高分辨率成像模型與處理方法研究”[2014-2017], NSFC重點項目“多角度SAR成像理論與方法”[2015-2019], NSFC青年基金“直升機載陣列快拍成像雷達模型與方法研究”[2015-2017], NSFC面上項目“圓跡SAR目標方位散射特征提取方法研究”[2016-2019], NSFC青年基金項目“多基線圓跡SAR成像處理方法研究”[2016-2018], NSFC重點國際合作研究項目城市基礎設施3維形變監測的雷達成像模型與方法研究[2019-2023]。
研究團隊的主要研究成果包括:提出了信息球的概念,能夠對SAR 3維成像觀測模式進行統一表達;提出了稀疏微波成像的概念,并將稀疏成像引入多基線SAR,獲取了林區和建筑的3維重建圖像;研制了多通道陣列SAR系統,開展了國內首次下視SAR塔吊實驗,獲取了地面目標3維圖像;開展了國內首次圓跡SAR機載實驗,成功獲得首幅全方位高分辨圓跡SAR對地觀測圖像。
下面,將對研究團隊的研究成果進行具體介紹。
4.1 多基線SAR
研究團隊將現代信號處理中的譜估計方法引入多基線SAR[24,25],以實現垂直視線方向的高分辨率。在微波暗室條件下開展了多基線SAR 3維成像實驗,通過天線在方位向和高度向上的運動形成對目標觀測的方位向-高度向2維合成孔徑。高度方向上共進行了12條軌跡的平行觀測,觀測對象為10個金屬球,分布于3個方位向位置上,如圖7所示,紅框內的4個金屬球在斜距面處于等方位-等距離的疊掩位置。圖8為成像處理結果,其中,圖8(a)為常規2維成像圖,可以看到,紅圈內的散射中心為4個金屬球疊掩在一起,無法區分;圖8(b)為基于FFT 3維成像的疊掩金屬球方位切片,可以看到,通過多基線處理實現了解疊掩;圖8(c)為基于譜估計方法Yule-Walker的方位切片,可看到疊掩方向的分辨率得到提升。
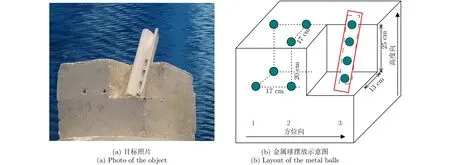
圖7 暗室多基線SAR觀測的目標場景Fig. 7 The object of the multi-baseline SAR experiment in the chamber

圖8 暗室多基線3維SAR成像結果Fig. 8 3-D imaging results of the multi-baseline SAR experiment carried out in the chamber
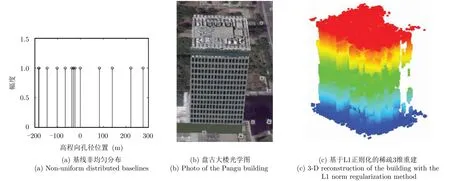
圖9 利用TerraSAR數據的多基線SAR 3維重建結果Fig. 9 3-D reconstruction of the Pangu building using the TerraSAR-X multi-baseline data
針對多基線SAR軌跡非均勻、欠采樣等問題,研究團隊引入了基于L1正則化的稀疏微波成像方法[26-29],利用觀測場景在垂直視線方向的稀疏性,降低對基線數量、跨度和均勻性的要求。圖9為利用TerraSAR的14條重航過數據對盤古大樓進行3維重建的結果,其中,圖9(a)為基線分布示意圖,可以看到,基線分布非均勻且稀疏,圖9(b)為盤古大樓光學圖片,圖9(c)為基于L1正則化的稀疏3維重建結果。圖10為使用BioSAR 2008機載多基線數據,分別采用譜估計和基于L1正則化稀疏重建方法的對比結果。該數據是由德國宇航局E-SAR傳感器于2008年在瑞典北部森林區域獲取,包含6條重航過數據。由于植被在垂直視線方向不具有稀疏性,我們使用了小波基使垂直視線方向的信號稀疏化。圖10(a)為譜估計Beamforming算法的高程向重構結果,圖10(b)為基于小波變換的L1正則化稀疏重建結果,可以看到Beamforming仍存在著高旁瓣和高程向模糊問題,而基于小波變換的L1正則化方法可實現對高程向旁瓣和模糊的有效抑制,有效提升了高程向重構質量。
4.2 陣列下視SAR
研究團隊對陣列下視SAR的信號模型、分辨率理論、成像算法、陣列稀疏布局、陣列多通道幅相校正等方面進行了深入研究,開展了暗室和塔吊實驗驗證[7,30-45]。
在成像算法方面,提出了基于波數域積分的3維成像方法[7],開展了模擬下視3-D SAR進行城區測繪的暗室實驗,以驗證其能夠對不同高度平面逐層進行2維成像。觀測對象由建筑模型和金屬球構成,如圖11所示,其中,建筑A高度最高,建筑B次之,建筑C擺放位置最低。圖12為不同高度剖面圖像,從高到低依次看到建筑A房頂、建筑B房頂和金屬球,驗證了算法的正確性。在此基礎上,針對該算法需在陣列向大量補零,數據量和運算量大的問題,提出偽極坐標陣列下視SAR 3維成像算法[34-36],提高了運算效率;針對陣列長度有限,跨航向分辨率低的問題,提出了無網格L1正則化稀疏重建方法[38-41],實現跨航向的超分辨,同時,相比于常規基于網格L1正則化稀疏重建方法,散射中心位置重建更準確。
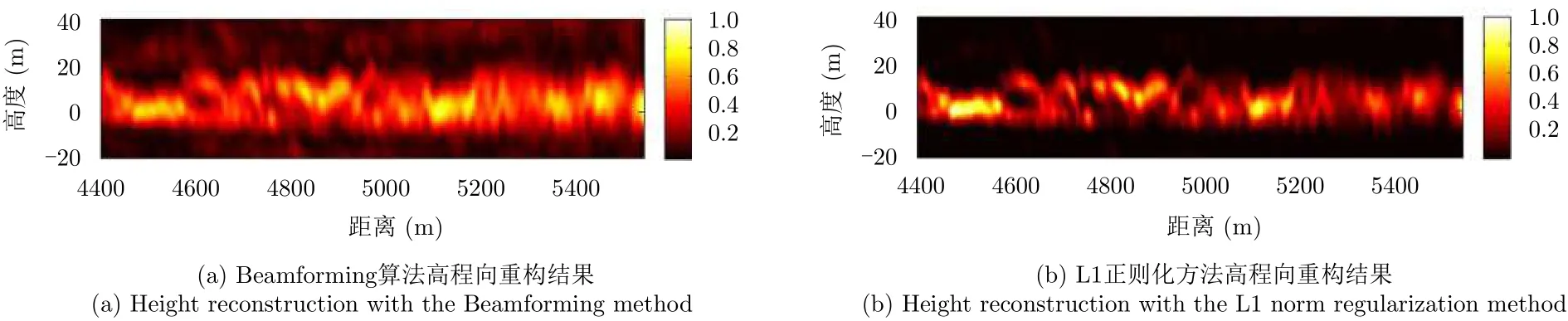
圖10 BioSAR森林地區多基線SAR 3維重構結果Fig. 10 3-D reconstruction of a forest area using the BioSAR multi-baseline data

圖11 模擬下視3-D SAR的成像幾何及建筑物模型Fig. 11 Geometry of the downward-looking SAR experiment and the building model
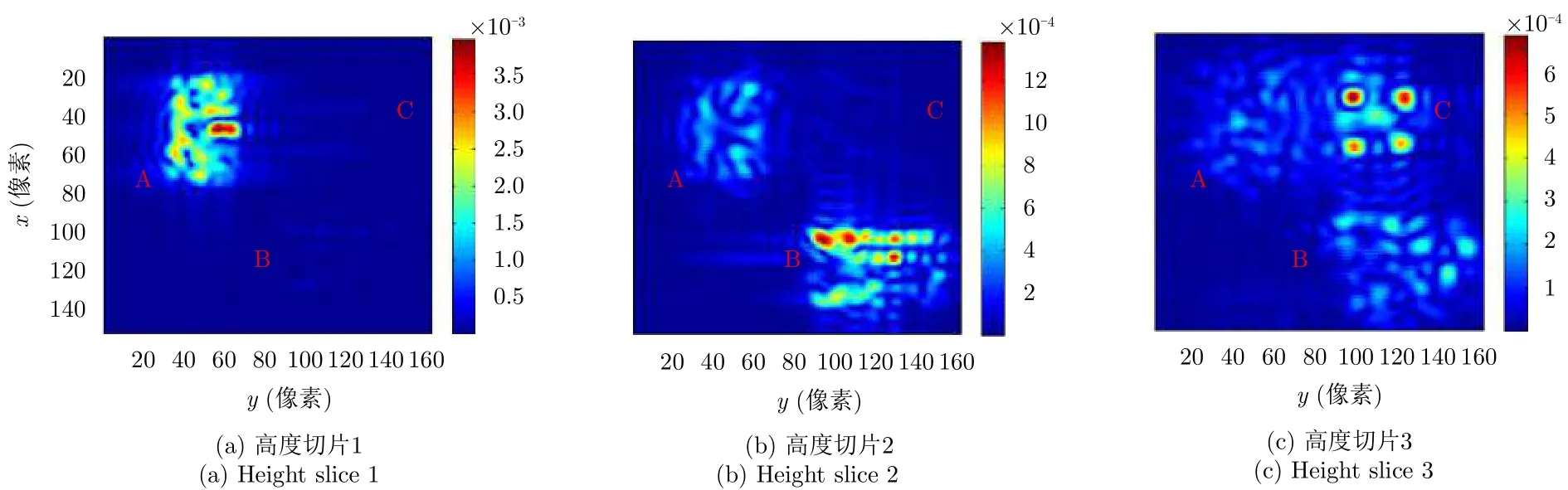
圖12 3維成像結果(2維剖面顯示)Fig. 12 3-D imaging results (shown by height slices)
在陣列系統研制和通道一致性校正方面,研制了由96個收發單元構成的Ka陣列SAR系統,利用該系統開展了暗室實驗[42,43]。陣列SAR系統如圖13所示,實驗時,陣列SAR裝載于直線軌道上,陣列天線沿跨航向布置,發射信號為步進頻信號。數據采集時,由微波開關控制依次導通相應收發單元完成跨航向回波采集,同時,陣列天線沿軌道運動,完成航跡向回波采集。觀測目標分別為1個三面角反射器和1個由平面鋁板組成的字母IE。采用特顯點外定標的方式對陣列多通道幅相一致性進行校正,圖14為通道一致性校正前后三面角反射器數據的距離壓縮信號和2維成像結果,可以看到,校正前,由于各通道信號相參性差,圖像散焦嚴重,方位向難以分辨;校正后,角反射器聚焦良好。圖15為通道一致性校正前后字母IE板的3維成像結果,可以看到,IE字樣清晰可見。
陣列稀疏布局方面[30],依據陣列收發組合和陣列收發信道特性,研究了等效相位中心均勻的收發分置和收發共用稀疏陣列布局,在此基礎上,研究了受限于載機安裝條件等效相位中心近似均勻的收發分置稀疏陣列布局,并對不同稀疏陣列布局方法性能進行了綜合比較。表1為不同陣列稀疏優化布局方案對比,可以看出等效相位中心均勻的稀疏陣列陣元安裝位置要求都比較嚴格,相位中心與稀疏陣列長度比最小的是兩側接收中間發射收發分置稀疏陣列,陣列稀疏率都比較大,實際載機平臺可能會由于陣元安裝位置受載機平臺制約而出現等效相位中心近似均勻的情況。
2013年,研究團隊研制了Ku波段全極化塔吊下視陣列實驗系統,開展了國內首次塔吊陣列下視SAR 3維成像實驗,獲得了地面目標的3維圖像[30,34]。
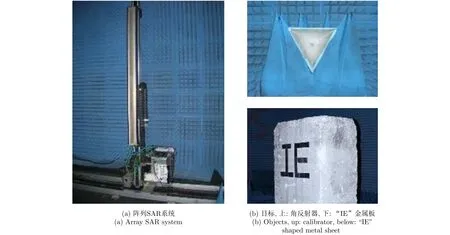
圖13 陣列SAR系統與暗室實驗觀測目標Fig. 13 Array SAR system the objects used in the experiment
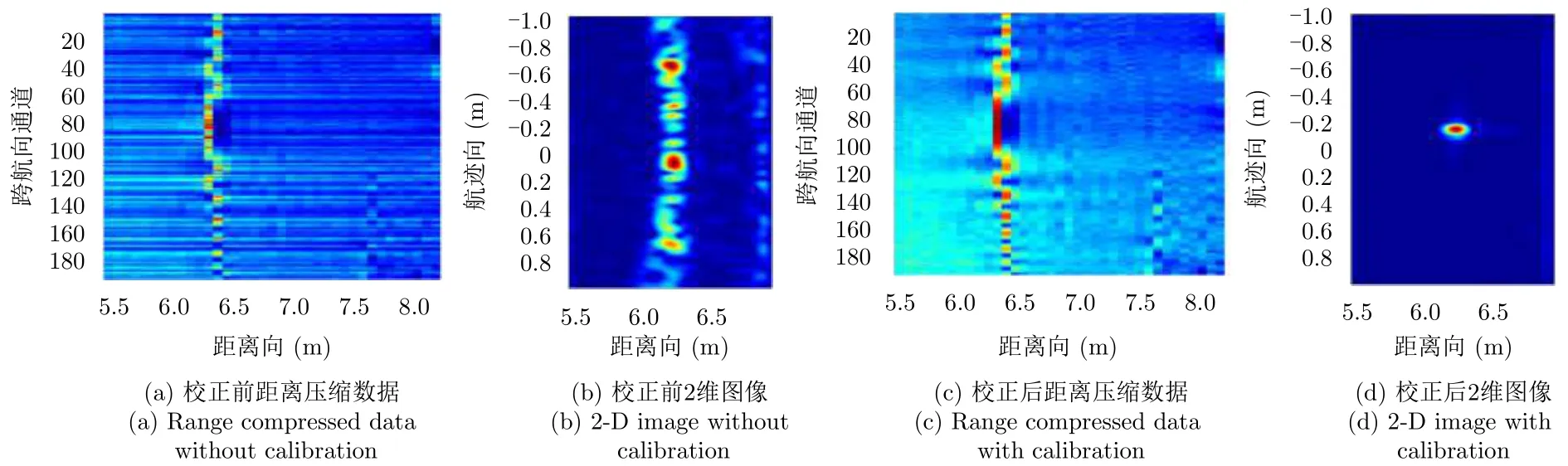
圖14 通道一致性校正前后角反射器數據處理結果對比Fig. 14 Imaging results of the corner reflector with and without the multi-channel calibration
該原理驗證裝置主要由發射分系統、接收分系統、線陣天線與微波網絡分系統、頻率源與定時分系統、數據采集與記錄器、計算機監控單元、供電模塊,以及POS、支撐機構等組成,系統組成框圖如圖16所示。陣列天線由4排256個喇叭天線均布組成了全極化收、發陣列,如圖17所示,發射信號為調頻連續波(FMCW)。
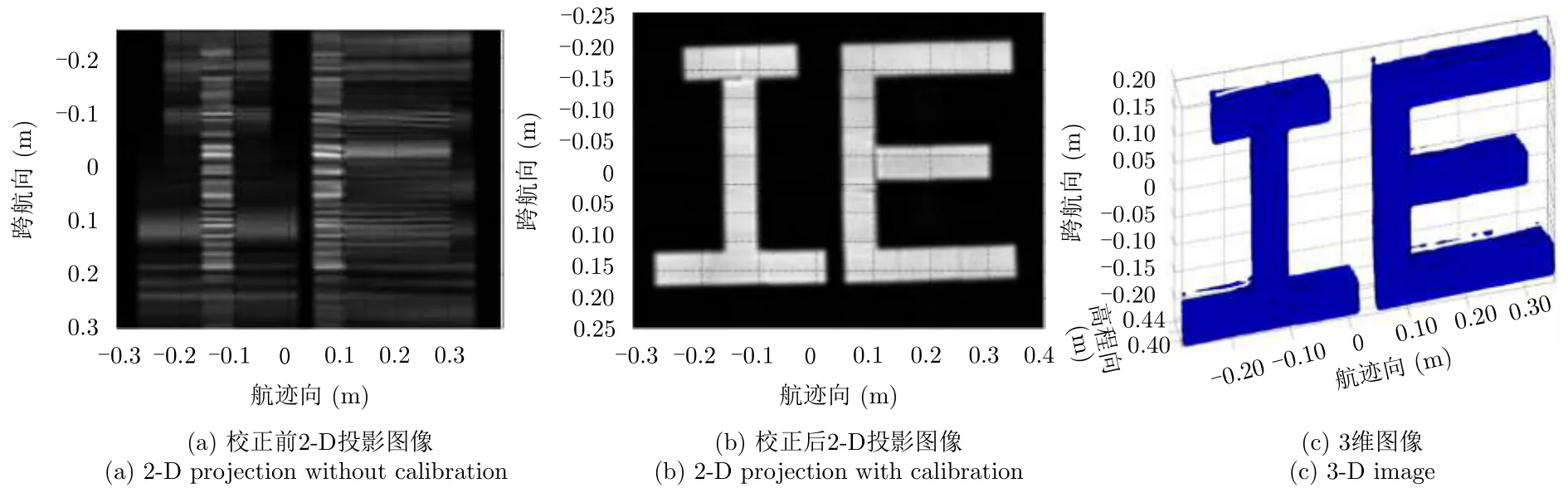
圖15 字母IE數據的通道一致性校正前后成像結果對比Fig. 15 Imaging results of the IE metal sheet with and without the multi-channel calibration
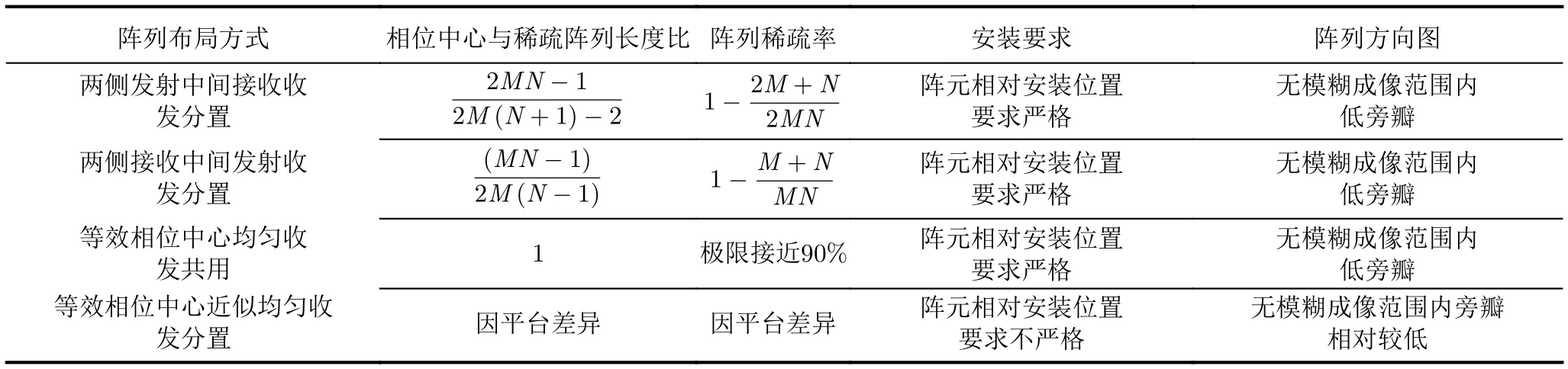
表1 不同陣列稀疏優化布局方案對比Tab. 1 Comparation of different sparse array scheme
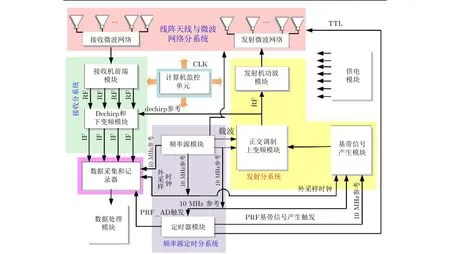
圖16 塔吊下視陣列原理驗證系統組成框圖Fig. 16 System block diagram of the tower crane downward-looking array SAR system
在塔吊實驗中,陣列天線安裝在與塔臂垂直的方向,波束向下,照射正下方區域,在平臺沿著塔臂勻速直線運動的過程中進行數據采集,如圖18(a)所示。觀測場景為放置于地面的1個孤立角反射器,和由7個角反射器構成的呈3維立體構型的三面角反射器陣,如圖18(b)所示。
塔吊陣列下視3維成像實驗結果如圖19所示。其中,圖19(a)為3維圖像數據的3維等值面圖,可以看出,每個角反射器的散射中心呈3維分布,且清晰分辨,圖19(b)-圖19(d)分別為航跡-跨航平面、航跡-高程平面、跨航-高程平面3個平面的正射投影圖,可以看到各角反射器的散射中心3維分布,圖中,由于天線正下視照射,地面鏡面反射較強,形成較強的地面背景雜波,這也是機載下視SAR實際化應用需要應對的一個問題。
該原理驗證裝置還具有較大升級空間,如可采用同時多發多收的最小冗余線陣設計、正交波形編碼信號、可構建實時處理器等。
4.3 圓跡SAR與多基線圓跡SAR
研究團隊對圓跡SAR的點擴展函數、分辨率理論、成像算法等成像機理進行了深入研究,開展了金屬球暗室轉臺實驗驗證,圖20為3維成像結果,可以看到,對于散射各向同性的點目標,圓跡SAR具有3維分辨能力[46-48]。
研究團隊將圓跡SAR 3維成像應用于地球同步軌道,提出了地球同步軌道圓跡SAR的概念[46,49-51]。對軌道參數進行設計,可形成近似圓形的合成孔徑,通過SAR系統凝視觀測,可對大面積區域進行連續定點連續觀測,并獲取3維分辨圖像。地球同步軌道圓跡SAR在連續覆蓋區域、瞬時可視范圍和3維信息獲取方面,具有低軌衛星無法比擬的優勢,在對地觀測方面有重要的應用前景。
研究團隊對地球同步軌道圓跡SAR的分辨率指標、時間覆蓋度等成像能力進行了分析,對軌道模型、大面積快速3維成像算法等進行了研究。圖21為地心慣性直角坐標系下地球同步軌道圓跡SAR觀測幾何,衛星軌跡位于赤道上方,在xoy平面上的投影近似為圓形。地球同步軌道圓周觀測中,觀測視角差異最大為圖21(a)中的角度,約為20°,目標可認為是各向同性的,因此,該觀測幾何下具有3維分辨能力。在L波段,500 MHz帶寬條件下,3維分辨率可達約0.3 m×0.3 m×0.3 m。由于觀測視角的差異,3維成像的點擴展函數朝向的空變性隨著目標位置變化,但分辨率的空變性不大,圖22給出了不同位置目標的3維點擴展函數,可以看到明顯地旋轉,但3 dB分辨率差異不大。時間覆蓋度方面,在滿足0.3 m×0.3 m×0.3 m分辨率要求的條件下,單顆衛星時覆蓋率為地球總面積的33%,4顆衛星時,覆蓋率達到地球表面總面積的92%。
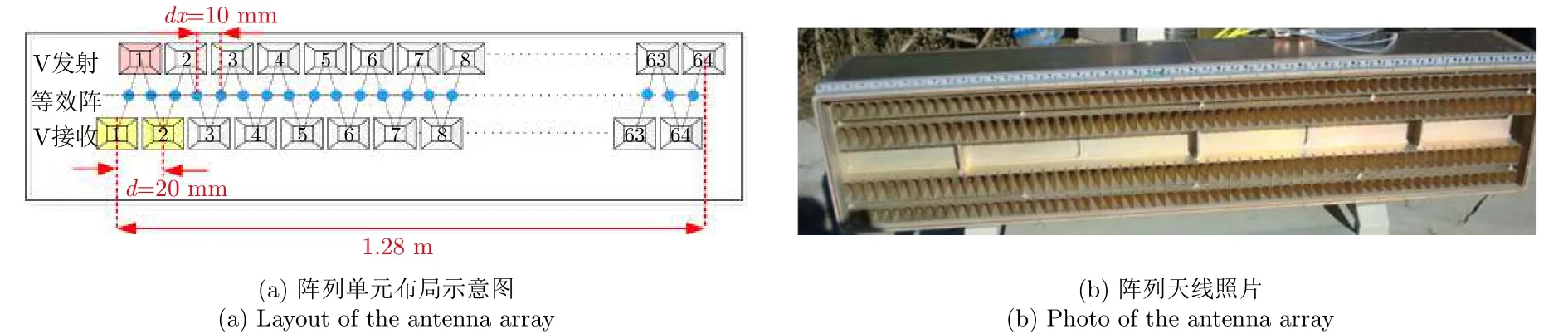
圖17 塔吊下視陣列天線Fig. 17 Antenna array of the system
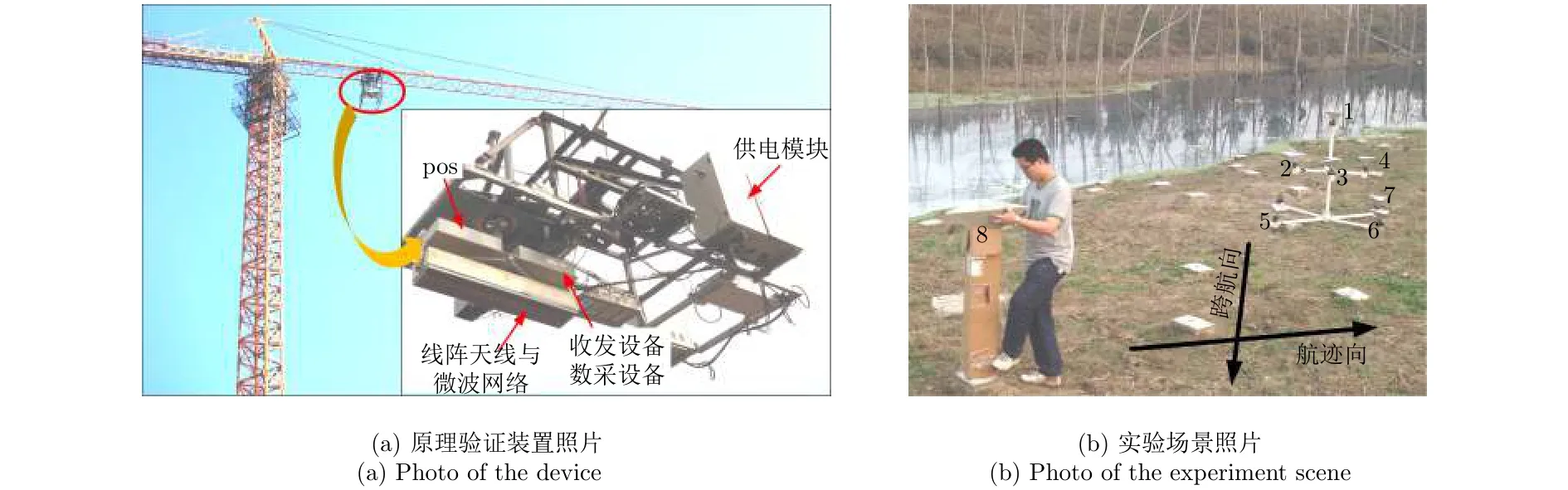
圖18 塔吊陣列SAR下視實驗Fig. 18 The tower crane downward-looking array SAR experiment
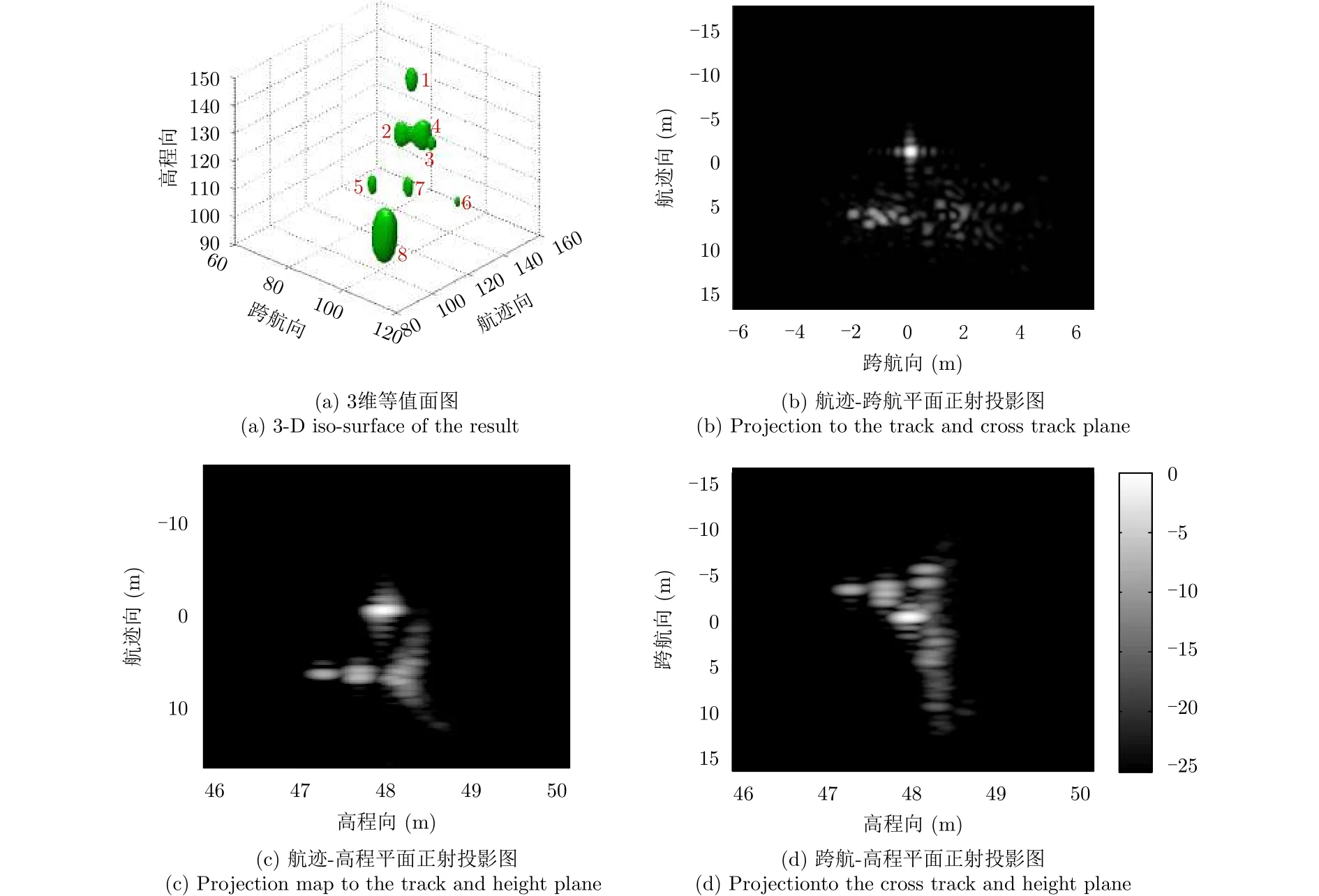
圖19 塔吊陣列SAR下視實驗3維成像結果Fig. 19 3-D imaging results of the tower crane downward-looking array SAR experiment
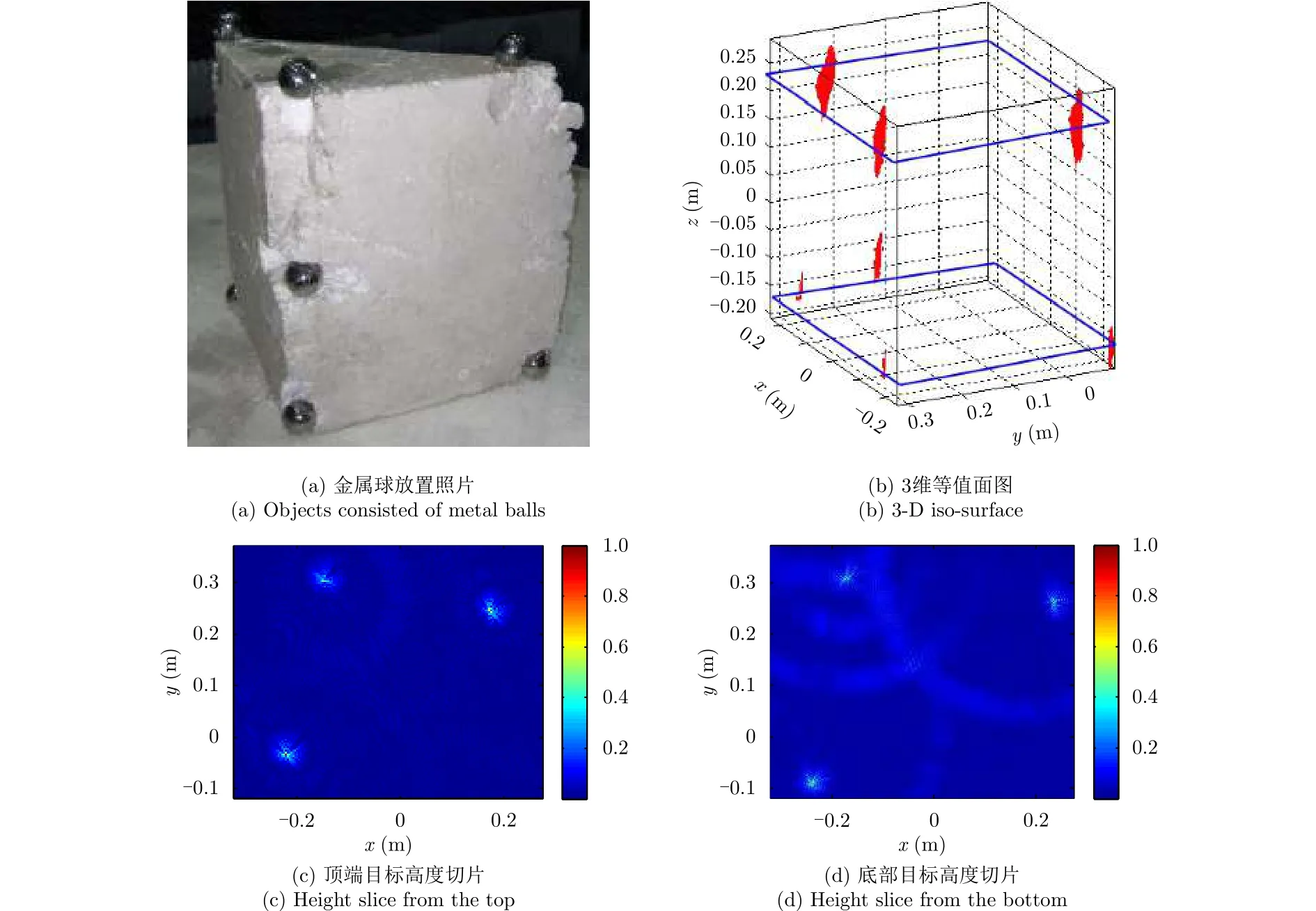
圖20 金屬球暗室轉臺實驗。Fig. 20 Metal ball turn table experiment in the chamber
在圓跡SAR機載實驗方面,研究團隊開展了國內首次機載圓跡SAR實驗,獲得了全方位高分辨觀測圖像[52]。與地球同步軌道圓跡SAR的觀測幾何不同,機載圓跡SAR對目標觀測的入射角更大,360°觀測時,則視角差異更大,實際場景的散射各向異性明顯。圖23為某一觀測場景在不同方位角下的圖像,可以看到,真實場景,尤其是人造目標,散射各向異性明顯,圓跡觀測能夠獲得目標更完整的輪廓信息,然而對各向異性目標的3維分辨能力較弱。

圖21 地心慣性直角坐標系下地球同步軌道圓跡SAR觀測幾何Fig. 21 Geo-CSAR geometry in the geocentric inertial cartesian coordinate
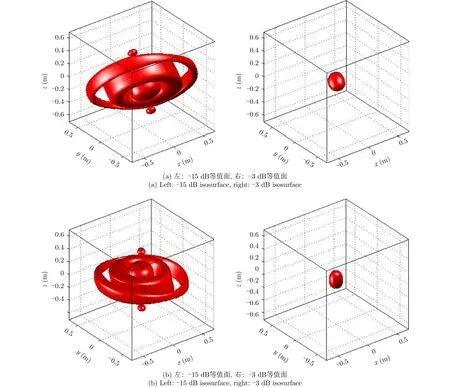
圖22 地球同步軌道圓跡SAR 3維成像點擴展函數Fig. 22 3-D point spread function of Geo-CSAR
研究團隊分析了各向異性散射特性對圓跡SAR 3維分辨能力的影響[46,53],如圖24所示。對于各向同性目標,在其真實高度平面成像,回波信號聚焦成強點,而在其他高度平面成像,由于圓跡SAR的斜距面隨著平臺的運動不斷變化,根據零多普勒-最近斜距成像原理,信號能量擴散為半徑與高度誤差成正比的圓環,形成旁瓣,因此能夠對目標進行3維分辨;而對于各向異性目標,尤其是散射方向性較強的人造目標,因只在某個角度有散射回波,在各高度平面成像時,聚焦性能對高度不敏感,在垂直視線方向不具有分辨能力。
在實際場景圓跡SAR成像時,由于目標各向異性,難以獲得3維分辨圖像,但是仍需要輔助的高度信息,否則,同一位置的目標在不同觀測角度的投影位置不同,會形成上文所述的圓環形或弧形假目標。如圖25所示,圖25(a)為錯誤高度平面成像時,目標投影呈環形的示意圖;圖25(b)為實際數據處理時,在錯誤高度成像,目標錯位,形成環形假目標;圖25(c)為正確高度成像時,目標聚焦于正確位置。為解決成像對高度的敏感性問題,利用多角度圖像間的偏移與高程的正比關系,提取高程信息,用于圓跡SAR成像。圖26給出了基于圓跡SAR數據的DEM提取結果及利用DEM進行圓跡SAR成像的結果,可以看到,圖像聚焦質量良好。
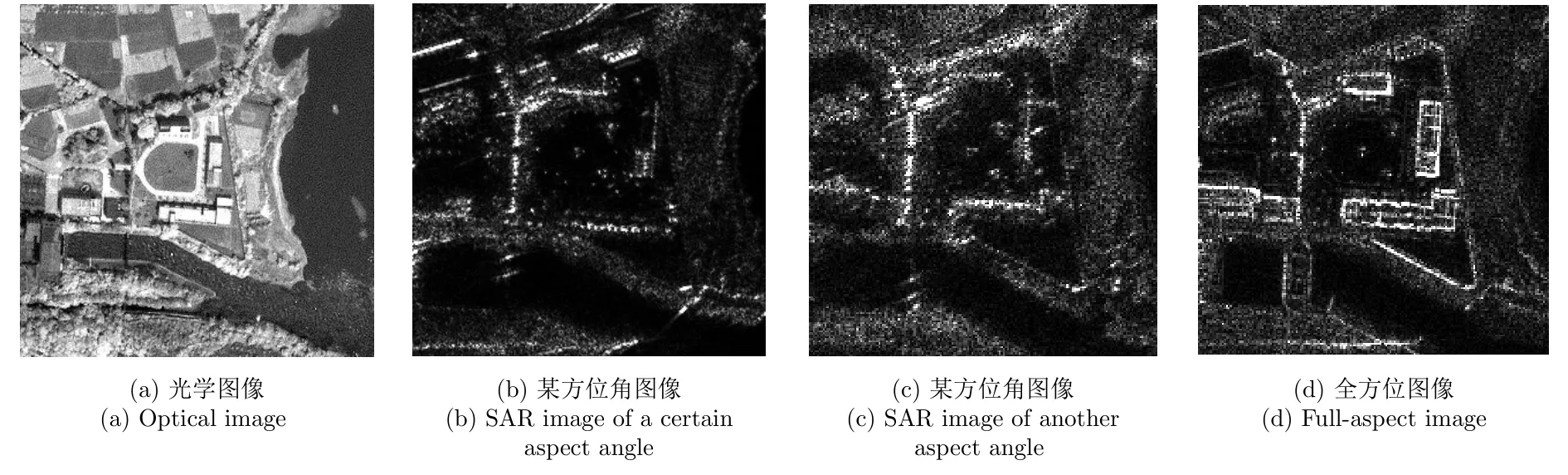
圖23 真實場景的各向異性特性Fig. 23 Anisotropic properties of the real scene
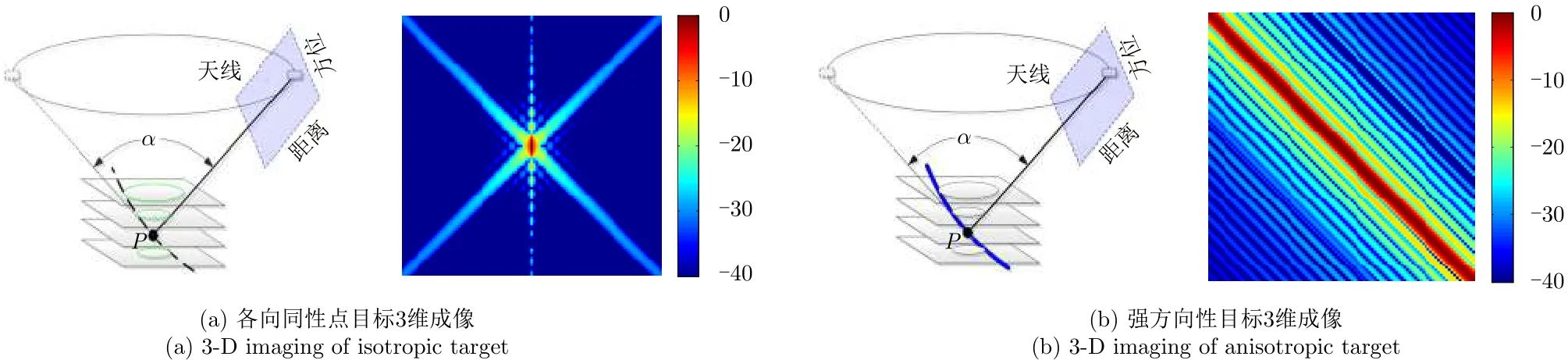
圖24 散射各向異性對圓跡SAR 3維分辨能力的影響Fig. 24 The effect of anisotropic property to the 3-D resolving capability of circular SAR
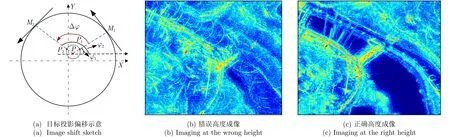
圖25 高程對圓跡SAR成像的影響Fig. 25 Effect of height to the imaging of circular SAR
針對典型目標的3維精細成像問題,研究了干涉圓跡SAR(Interferometric Circular SAR, InCSAR)[46,54-56]和多基線圓跡SAR的3維成像方法[37,57]。對于特定的無疊掩現象的情況下,可采用干涉圓跡SAR剔除錯誤高度平面上的錯位圖像,獲得目標的3維結構信息。其基本原理是對各高度平面逐層進行干涉處理,在目標真實高度,干涉相位為0,而在其他高度,兩通道的錯位帶來干涉相位或低相干性予以剔除,從而增強圓跡SAR 3維成像能力。圖27為暗室坦克模型的干涉圓跡SAR 3維成像結果,可以看到,通過干涉處理,非正確高度處的投影圖像被剔除,目標3維結構信息清晰可見。相比于常規2維成像,全方位3維重建具有精細結構描述能力,更利于目標判讀解譯。
對于存在疊掩問題的情況下,研究團隊采用多基線圓跡SAR 3維成像技術,利用多基線數據解疊掩。與常規多基線SAR不同的是,首先需要判斷目標的散射方向,然后解疊掩。研究團隊采用美國空軍實驗室(AFRL)發布的Gotcha數據開展了實驗驗證。該數據包含了8條X波段全極化圓跡SAR重軌數據,實驗場景是一個停車場。對其中的HH極化8基線數據進行了成像處理,并選取場景中的一輛汽車進行3維成像。如圖28所示,圖28(a)為基線分布,圖28(b)為目標汽車的光學照片,圖28(c)為以地平面為成像平面的單條軌跡2維成像結果。地平面2維圖像中可看到內外兩個輪廓,經過成像幾何分析可知,內輪廓為汽車的底部,代表了汽車的真實輪廓;外輪廓為汽車的頂部,由于汽車頂部高度與成像平面高度的差異,頂部輪廓偏離真實位置,向外側擴散,即產生幾何畸變,不能代表汽車的真實輪廓。圖28(d)和圖28(e)給出了多基線處理后,汽車的3維成像結果點云圖的側視圖和俯視圖,可以較清晰地看出車體的輪廓。
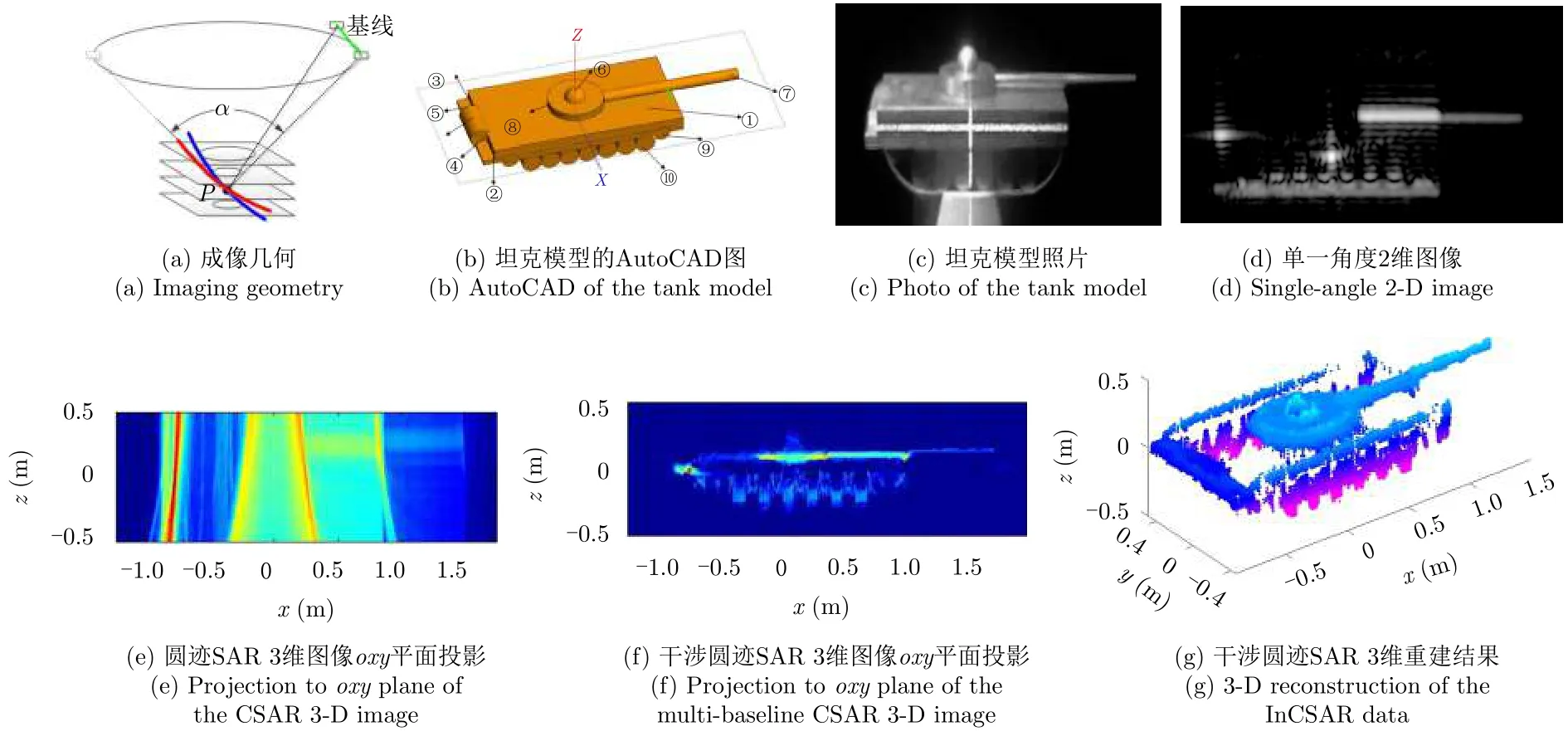
圖27 干涉圓跡SAR 3維重建Fig. 27 3-D reconstruction of InCSAR
研究團隊將多基線圓跡SAR模式用于近景人體表面成像[7,58],在安全檢測領域有重要應用。研制了一套工作在毫米波陣列雷達圓柱掃描人體表面3維成像試驗系統,系統的成像幾何和實物照片如圖29所示。陣列天線垂直放置,數據采集時,由微波開關控制依次導通相應收發單元完成陣列向回波采集,同時,陣列天線以一定半徑圍繞中軸旋轉,完成柱面回波采集。毫米波陣列雷達圓柱掃描系統可以穿透遮蔽物,對人體表面進行全方位3維成像,探測體表隱蔽目標。圖30為人體模型的3維圖像數據分別在正面、側面和背面的投影圖像,可以看到,該系統具有全方位高精度3維成像能力。
5 總結與展望
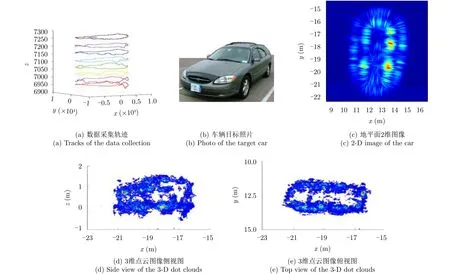
圖28 多基線圓跡SAR 3維成像結果Fig. 28 3-D imaging results of multi-baseline circular SAR
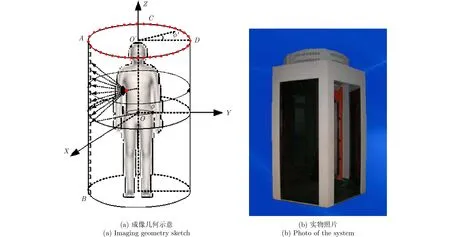
圖29 陣列雷達圓柱掃描3維成像試驗系統Fig. 29 Cylindrical scanning array radar 3-D imaging system
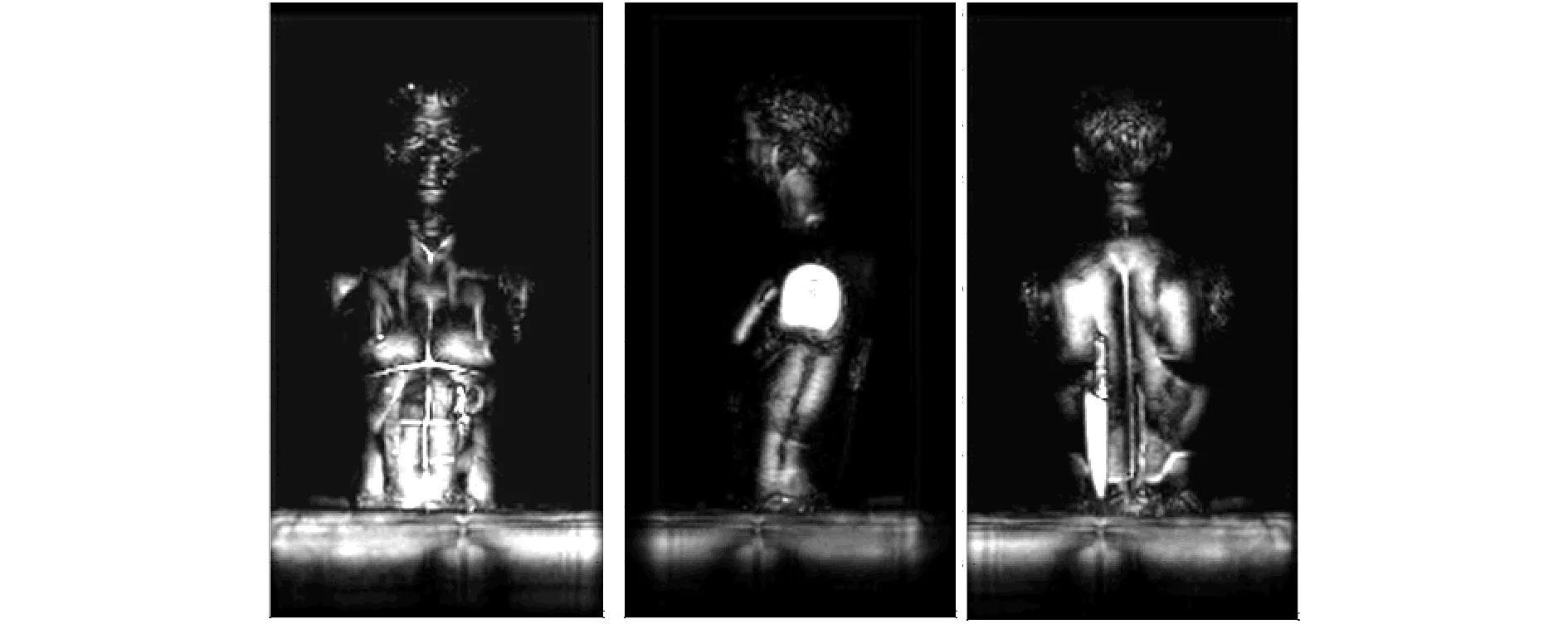
圖30 人體模型3維成像結果Fig. 30 3-D imaging result of a mannequin with the cylindrical scanning array radar system
從2維成像拓展到3維成像是SAR成像技術的一次重要跨越。SAR 3維成像解決了常規SAR中的疊掩問題,能夠實現3維分辨,從而在復雜場景下,對目標進行3維定位、獲取垂直結構信息等。為適應不同的平臺,滿足不同的應用需求,發展出了一系列新體制SAR 3維觀測模式,包括多基線SAR、陣列下視SAR、圓跡SAR、多基線圓跡SAR等。國內外的機載、星載實驗已驗證了SAR 3維成像的可行性,展示了SAR 3維成像帶來的全新視野,展現了其在城市測繪、森林監測、重點目標精細監測等領域的重要應用潛力。未來SAR 3維成像技術還將在以下幾個方面有進一步的發展。
(1) 3維散射特征描述:目前已經能夠獲取SAR 3維圖像數據,但如何對3維圖像的散射特征進行描述仍是一個新的課題。如何將圖像統計分布、紋理特征等在SAR 2維圖像中常用的圖像散射特征拓展到3維?3維圖像又有哪些新的散射特征量?上述問題的深入研究對于深入理解SAR 3維圖像,并服務于目標識別、分類等應用具有重要意義。
(2) 復雜軌跡精細化處理:現有SAR 3維成像模式多采用較為規則的軌跡,例如,多基線SAR和陣列下視SAR都采用直線飛行、圓跡SAR和多基線圓跡SAR采用圓形軌跡。未來,研究機動軌跡下的精細化3維成像數據獲取與數據處理方法能夠提升SAR 3維成像技術對復雜應用環境的適應能力,增強實用性。
(3) 多維度3維成像:多維度觀測是SAR技術發展的重要趨勢,SAR 3維成像技術已經開始與SAR極化技術、SAR多角度成像技術相結合,并開始展現出了更為豐富的目標信息。未來,與多極化、多角度、多波段、多尺度相結合的多維度SAR 3維成像是重要的發展方向,對觀測對象生物物理參數的準確反演、提升目標理解能力具有重要意義。
(4) 新的數據獲取方式:隨著SAR系統技術的不斷進步,新的SAR 3維成像模式將不斷涌現。例如,隨著單系統成本的降低、多系統同步性能的提升,分布式SAR 3維成像或將成為下一階段的一個研究熱點。分布式SAR 3維成像利用分布在空間中多個雷達節點進行相參數據采集,通過聯合數據處理實現3維分辨成像,在工作模式的靈活性、數據獲取的時效性、3維分辨能力提升、多維度信息獲取等方面具有顯著優勢,在衛星、飛機和地基平臺上都具有重要的應用潛力。
致謝 本文的研究進展主要源于中國科學院電子學研究所SAR成像新概念新體制新技術研究團隊。團隊2005年開始致力于SAR 3維成像概念與模型的探索研究,10余年來陸續開展了以極化特征和多角度觀測為代表的多維度SAR成像機理、體制與方法研究,近年來以其高精度高效算法優化、全息信息提取方法、及其面向未來敏捷平臺+數字掃描星/機基和分布式無人觀測平臺等的應用研究。研究團隊成功獲得2007年科技部“下視陣列天線3維成像SAR”前沿探索項目、2009年國家部委“同步軌道圓跡SAR”探索項目、2011年國家高分專項“分布式陣列SAR”新體制項目、2015年國家自然科學基金委(NSFC)重點項目“多角度SAR”項目、2017年國家部委“無人機載圓周SAR”關鍵技術項目和“星載SAR多角度成像”預研項目等多項國家級項目的持續立項,并在多項NSFC杰出青年/面上/青年基金、NSFC“多維度微波成像重大項目”、973項目“稀疏微波成像”等的共同支持下,在國內率先完成第1幅360°全方位圓周SAR飛行試驗和成像處理、陣列系統3維分辨成像可行性論證實驗、近直線航跡寬角SAR及多角度特征研究、曲線軌跡單通道SAR-GMTI、稀疏微波成像方法及其在3維成像算法中的應用等研究工作。上述工作依托中國科學院電子學研究所卓越的研究平臺,在模型方法研究、可行性驗證、原型系統研制、科學實驗等方面,與所內外、國內外多個優秀團隊研究人員進行了持續、廣泛的交流與合作,在此一并表示衷心感謝,并對所有參研同事和研究生在長期的科研活動中所展現出的熱情、智慧、執著和奉獻致以誠摯的敬意。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55