2BQ-28型三七精密播種機布局優化研究
2018-04-12 00:52:50楊文彩杜一帆宋志鵬
農機化研究 2018年4期
林 利,楊文彩,杜一帆,宋志鵬
(云南農業大學 機電工程學院,昆明 650051)
1 研究背景
三七是云南省重要的中藥材作物,具有極高的藥用、醫療保健及經濟價值[1]。以云南農業大學朱有勇院士為首的克服三七連作障礙研究團隊探索的三七槽式育苗模式,是云南省政府主導推廣的三七育苗模式,經過多年實踐也證明了其科學性和實用性[2]。課題組針對該模式研發出配套的2BQ-28型三七精密播種機,在生產實踐中具有良好的效果。
三七精密播種問題涉及到農藝、播種機械、操作人員及大棚育苗環境等多因素,是一個人-機-環境系統工程問題。為了充分認識三七槽式育苗模式中各個因素互相作用的關系,課題組前期運用模糊綜合評價法,對2BQ-28型三七精密播種機進行了人-機-環境系統工程安全性評價,總體安全性評價一般。其中,人、環境的因素評價良好,機的評價因素一般。在近兩年的生產實踐中,人環適應已經得到了充分考慮[3],但2BQ-28型三七精密播種機主要還存在人-機不夠配合及機-環不夠協調等問題。具體體現在:①部件空間布局不合理;②傳動關系不合理;③人機操作安全性有待提高。
人-機-環境系統工程是運用系統科學理論和系統工程方法,正確處理人、機、環境三大要素的關系,深入研究人-機-環境系統最優組合的一門科學[4]。本文擬運用人-機-環境系統工程及機電一體化設計等相關知識,對上述問題進行優化。
2 基于人-機-環境系統工程的布局優化
2.1播種機存在的問題分析
2.1.1部件空間布局不合理
部件空間布局不合理,主要體現在:①電機的安裝位置使操作人員清理種子困難,且操作人員使用升降桿調節萬向輪高度時手臂和肘容易磕碰種子箱。②機器的質量分布不對稱。機器行走過程中向一端有微量傾斜,加上育苗槽建造規范性、基質高低均勻性不理想,機器歪斜超過限位輪保護范圍,造成機器卡死、刮壞育苗槽等現象,具體如圖1所示。Q1標注位置:萬向輪升降桿與種子箱之間的距離過近,操作人員手動旋轉萬向輪升降桿時,種子箱在人體的手、肘旋轉運動半徑以內,極易發生磕碰,影響操作人員手部安全,降低工作效率。Q2標注位置:電機與種子箱最窄處不足50mm,空壓機與種子最寬處不足90mm;參考國標GB/T 18717.2-2002中雙前臂至肘向前、下進入開口的方法,開口最小應滿足手臂厚度50mm、基本裕量20mm、工作服20mm,共計90mm,可知Q2處的厚度基本不能滿足這一條件[5]。Q3標注位置:控制柜、電機等較重部件集中在播種機左側,機器行進時向左側傾斜并擠壓此側限位輪,當機器偏差過大超過限位輪工作范圍時,限位輪卡死,出現非正常停機現象。③排種器護種板開口位置不合理:播種機在工作時,可能存在窩眼滾筒重復充種、窩眼內包衣劑粉塵過多的現象,如圖2~圖3所示。為了清除窩眼滾筒內卡死或多余的種子,以及包衣劑粉塵、灰塵等雜質,本機設計了排種器護種板開口,操作人員可以使用空壓機氣槍通過護種板開口進行清種。

1.萬向輪升降桿 2.窩眼滾筒軸線保護機殼 3.機架4.控制柜 5.電機 6.種子箱 7.種子箱隔板 8.空壓機

圖2 操作人員視角示意圖
圖2中,由于此開口過短,且開口位置過低,含有多余種子的窩眼滾動到排種器護種板開口時,操作人員無論是站姿還是蹲姿都無法第一時間看到;當操作人員發現窩眼內含有種子時,操作時間已經不足。
2.1.2傳動關系不合理
本機的傳動關系是由電機通過所在軸齒輪鏈傳動帶動主動輪軸轉動,再由主動輪所在軸的齒輪通過鏈傳動帶動窩眼滾筒軸轉動。機器非正常停機時主動輪停止轉動,窩眼滾筒在電機的作用下持續轉動,導致嚴重的停機重播現象。改進前傳動方式如圖4所示。

圖3 改進前排種器護種板開口位置示意圖

圖4 改進前傳動方式簡圖
2.1.3人機操作安全性有待提高
正確的進行人-機-環境系統工程安全性評價對提高人機操作安全性很重要。根據Delphi法[6],項目組選取如表1所示的評價因素及評價指標。選擇備擇集{好,良好,一般,差},按照9標度打分法,設計了一、二級權重調查表,以參與2BQ-28型三七精密播種機播種生產環節的師生為調查對象進行數據采集。

表1 評價指標的選取
本文運用了模糊綜合評價法[7],對收集的調查結果進行分析評價,將數據帶入,得出權重集A=(0.31 0.4 0.29),單因素評價矩陣R為
最終得出人-機-環境系統工程的模糊綜合評價B=A×R=(0.18 0.4 0.37 0.09)。
根據以上數據分析,2BQ-28型三七精密播種機的人-機-環境系統工程安全性評價良好。
2.1.4用電安全性差
機器的用電安全性存在以下兩個問題:①控制柜內線路混雜,存在安全隱患且浪費大量空間;②機器接電方法不規范,隨著機器行進,電線在育苗槽肩及基質表面拖動易磨損漏電,且在一定程度上破壞了三七種苗的發育環境。
改進前控制柜內部電路安裝位置示意圖如圖5所示。

圖5 改進前控制柜內部電路安裝位置示意圖
圖5中,電路開關、端子排、控制顯示器等部隨意擺放,線路雜亂且沒有固定方式。改進前機器接電線路示意圖如圖6所示。圖6中,三七育苗大棚縱深方向每隔30~40m、水平方向每隔4~5個育苗槽設置有一個電線插座,負責播種機的電力供應。2BQ-28型三七精密播種機的接線方法為:由電線插座引線經槽肩、基質表面,在萬向輪升降桿繞匝(播種機工作時萬向輪向上收起擰緊)固定后通過電線插排接入控制柜。這種接線方法存在以下問題:①不符合電力系統設計要求;②萬向輪升降桿不具有繞線器的功能,容易發生電線掉落被機器碾壓的情況;③機器行進時,電線在育苗槽槽肩、基質表面拖動,電線表面的絕緣層受到嚴重的磨損,形成用電安全隱患;④三七種子播種后必須進行覆土處理,保護種子不受自然光、空氣流動等影響損失水分;但是覆土層的厚度很薄,三七種苗種植的農藝標準為1cm,機器行進時電線在基質表面拖動,破壞了覆土層,嚴重影響了三七種子的發育。
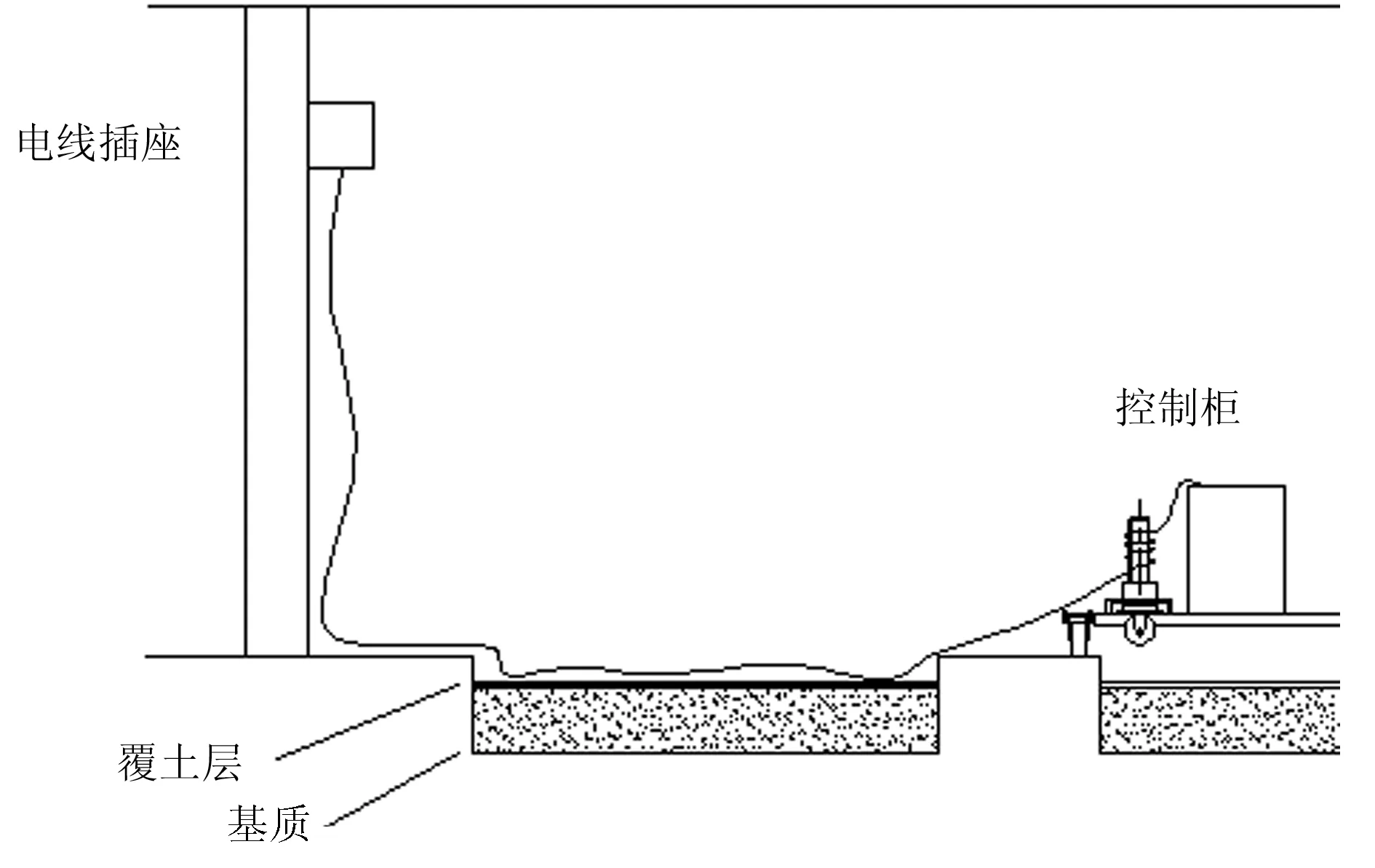
圖6 改進前機器接電線路示意圖
根據2.1.1~2.1.4節的分析可以得出結論:①需要對部件布局進行調整優化,使之符合人機工程學;②傳動關系需要重新設計;③機器安全性有待提高,尤其是用電安全需要改進。
2.2優化原則
2BQ-28型三七精密播種機布局優化的原則如下:①整機尺寸美觀大方,比例與尺度適合,適用于槽式育苗大棚。②控制部件集中,人機交互設備簡潔明了:操作裝置易于操作人員用力,符合人體工效學原則。③各部件布局合理,給操作人員操作機器預留空間;簡化整合各部件的線路;機器質量分布均勻。④安全性有保障,避免出現有可能傷害到操作人員的情況。
2.3優化措施
2.3.1播種機整機布局優化
改進后,電機與種子箱之間的距離增加45cm;控制柜調整到與空壓機同一水平方向,以平衡質量;播種機整機尺寸增加50mm;機器后方(以行進方向為正方向)萬向輪升降桿、機架與種子箱之間的距離增加50mm,如圖7所示。

1.控制柜 2.萬向輪升降桿 3.窩眼滾筒軸線保護機殼4.機架 5.電機 6.種子箱 7.種子箱隔板 8.空壓機
2.3.2傳動關系的改進
為解決2BQ-28型三七精密播種機卡死時出現的停機重播現象,現設計為電機通過所在軸齒輪鏈傳動帶動主動輪軸轉動,機器行進帶動從動輪軸轉動,再由從動輪所在軸齒輪鏈傳動帶動窩眼滾筒軸轉動;一旦機器非正常停機時,機器停止行進從動輪停止轉動,窩眼滾筒也停止轉動。改進后傳動方式簡圖如圖8所示。

圖8 改進后傳動方式簡圖
2.3.3排種器護種板開口優化
如圖2所示,以GB10000-1988《中國成年人人體尺寸》為參考依據,取人體站姿眼高1 600mm[8];軸心離育苗槽肩高度460mm,觀察護種板人員與窩眼滾筒軸心距離范圍取400~1 000mm;俯首舒適角取15°;人體主要視角以人眼水平視線為基準,向下偏離70°~90°[9]。種子箱的構造及尺寸經過實體測量及理論對比,得出以下數據:種子箱上部寬430mm,種子箱機器后側部分高345mm,種子箱機器機器前側垂直部分高245mm,傾斜部分高100mm,寬140mm,窩眼滾筒直徑230mm,護種板厚20mm,護種板開口最低端據窩眼滾筒軸線水平距離55mm,護種板開口最頂端距窩眼滾筒軸心垂直距離75mm。
改進后排種器護種板開口位置示意圖如圖9所示。改進后護種板開口最低端距窩眼滾筒軸線水平距離為65mm,護種板開口最頂端距窩眼滾筒軸心垂直距離25mm。
2.3.4控制柜的改進
控制柜外部采取雙LED燈顯示機器工作狀態,利用機械造型原理中點具有高度集中感覺,大面與點之間形成強烈的對比作用,極易引導視線、突出焦點[10];內部線路布局以電源線為設計基準[11],在控制柜中間增加絕緣線槽作為電路通道,電路開關、端子排、控制顯示器在絕緣線槽上方集中放置,如圖10所示。

圖9 改進后排種器護種板開口位置示意圖

圖10 改進后控制柜內部電路安裝位置示意圖
2.3.5機器接電方案的改進
為保障用電安全,做如下改進:在育苗棚內頂部、育苗槽肩正上方設置托架,控制柜外部增加一個繞線柱;機器接電線路從電線插座引出,經托架后在繞線柱上繞匝、固定,最終接入控制柜,如圖11所示。
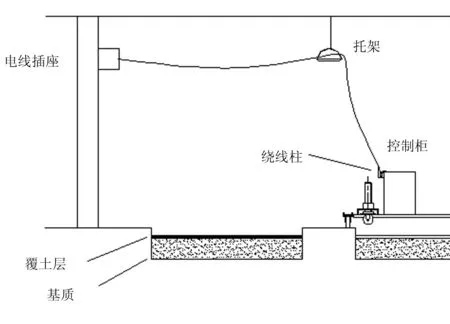
圖11 機器接電線路的機-環協調優化
托架只需在電線插座的水平位置上放置,每一個育苗槽間隔只放置一個,以規格16槽×120m槽長的三七育苗大棚為列,平均每個大棚只需放置36~48個托架,改進成本低,實用性強。
3 結論
科學、全面地認識三七育苗系統中的各個要素,系統優化三七精密播種機,對三七育苗環節起著重要作用。本文從人-機-環境系統工程的角度出發,綜合了三七育苗農藝要求、機械設計、機電一體化及人體工效學等各方面的知識,對2BQ-28型三七精密播種機整機及部件空間分布、傳動關系、排種器護種板開口位置、控制柜布局、機器接電方案進行了優化,改善了播種機的人-機匹配和機-環協調問題,為三七播種質量提供了重要保障。
參考文獻:
[1]崔秀明,黃璐琦,郭蘭萍,等.中國三七產業現狀發展對策[J].中國中藥雜志,2014,39(4):553-557.
[2]楊文彩,朱有勇,張汝坤,等.基于可持續發展的三七產業農機農藝融合工程技術體系研究[J].湖北農業科學, 2014,53(1):122-129.
[3]楊文彩,朱有勇,杜 遷,等.基于農機農藝融合的三七機械化精密播種系統研究[J].廣東農業科學,2014(2) :175-180.
[4]王保國,王 偉,黃偉光,等.錢學森系統科學思想在人機環境系統工程中的應用[J].華北科技學院學報,2014,11(8):1-18.
[5]國家質量監督檢驗檢疫總局.GB/T 18717.2-2002用于機械安全的人類工效學設計:第二部分:人體局部進入機械的開口尺寸確定原則[S].北京:中國標準出版社,2002.
[6]譚玉葉,宋衛東,李鐵一,等.采礦方法優選多目標決策一致性組合權重研究及應用[J].工程科學學報,2014(8):1115-1122.
[7]屈力進.基于模糊綜合評價法的煤礦機械制造工藝方案選擇[J]. 煤礦機械,2012,33(12):118-119.
[8]國家技術監督局.GB/T 10000-1988中國成年人人體尺寸[S].北京:中國標準出版社,1989.
[9]馬廣韜,代琦.基于人機工程學的汽車式起重機操縱室視野研究[J].沈陽建筑大學學報:自然科學版,2011,27(2):169-173.
[10]《機械設計手冊》編委會.機械設計手冊單行本:造型設計與人機工程[M].北京:機械工業出版社,2007.
[11]《機械設計手冊》編委會.機械設計手冊單行本:機電一體化系統設計[M].北京:機械工業出版社,2007.
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
軍事運籌與系統工程(2017年1期)2017-07-31 18:19:00
軍事運籌與系統工程(2016年3期)2016-09-26 11:40:59
鐵道通信信號(2016年3期)2016-06-01 12:10:18
軍事運籌與系統工程(2015年3期)2015-09-08 13:12:35
小說月刊(2015年3期)2015-04-19 07:05:54
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
