基于溫光耦合的溫室卷簾機控制設備開發
2018-04-12 00:52:41范奧華劉煥宇王孝龍范葉滿翟長遠
農機化研究 2018年4期
裴 雪,范奧華,劉煥宇,王孝龍,王 東,范葉滿,翟長遠
(西北農林科技大學 機械與電子工程學院,陜西 楊凌 712100)
0 引言
日光溫室是采用較簡易的設施,充分利用太陽能,在寒冷地區一般不加溫進行蔬菜越冬栽培[1]。我國已成為世界設施農業生產大國,種植面積穩居世界第一[2]。溫室系統是一個多變量、非線性、時變、強耦合的復雜系統[3]。室內環境因子的好壞,一方面由溫室大棚的生產管理因素決定,另一方面由設施本身的合理性和可調控性所決定,直接影響到作物生長發育的全部過程。
近年來,許多研究者通過智能控制方法來控制溫室環境因子,已取得了很多理論成果,目前研究重點主要集中在模糊控制和智能調控算法方面。不少學者利用PID控制方法、MCS-51單片機處理機、SoC的芯片GS1010[4]及ZigBee[5]系統,并基于多傳感器融合的控制系統,對溫室環境因子進行控制[4-8]。還有部分學者在控制中加入控制算法以實現智能化調控,如專家控制系統、模糊控制智能算法、溫度積分算法,以及基于切換系統的環境因子建模與預測控制方法[9-12]。
但是,以上研究多針對玻璃溫室等可控設備較多的現代化溫室,且投入成本高,而生產型日光溫室僅利用太陽能吸收熱量,采用保溫被保持溫度,可控設備較少,難以廣泛推廣應用,不能解決實際需求。本設備針對中小型溫室種植農戶,將精確傳感技術、無線遠程通信技術及智能信息處理技術結合,開發溫光耦合的溫室卷簾預測調控系統。研究基于嵌入式的低成本、易安裝的溫光耦合溫室卷簾控制設備,實現溫度和光照的實時監測;實現數據無線傳輸、預測算法的融合;實現基于無線傳感器網絡的設備控制指令下達機制,減少布線及運行成本;實現溫光耦合的溫室卷簾自動調控策略。
1 系統組成及原理
本系統由監測模塊、控制模塊、工控屏人機交互模塊及卷簾機設備4個部分組成,如圖1所示。

圖1 系統整體框圖
由監測模塊采集空氣溫濕度和光照強度數據,經由ZigBee無線傳感網絡傳輸數據至控制模塊,再由串口電路將采集到的數據傳送給工控屏;在工控屏中利用嵌入的溫光耦合算法預測下一時刻溫度,依據作物所需設置的溫度和光輻射閾值給出決策指令,反饋給控制機設備的控制;同時,工控屏可以實時顯示3個歷史溫度值、1個當前溫度值、光照值及下一時刻溫度預測值,實現友好的人機交互。
2 硬件實現方案
2.1監測節點硬件設計
監測節點由電源模塊及傳感器模塊等組成,主要實現各空氣溫濕度及光照強度的監測。在電源模塊的驅動下,獲得各傳感器數據,通過無線網絡將監測數據傳遞給控制模塊。同時,在該模塊加入了紅外對射限位開關,防止了過卷,提高了設備的自動操作程度。
電源模塊采用兩種模式供電:一種是標準5V直流電源,通過AMS1117標準電源模塊完成5V到3.3V工作電壓轉換,完成對溫度傳感器等對應部分的供電;另一種是標準12V直流電源,同樣需經過電壓轉換后才能完成對光照傳感器的對應部分供電。限位開關的作用是防止卷簾機在降簾和升簾時發生過卷情況,在卷簾的起點和終點各放置一對紅外對射開關,在沒有物體遮擋開關時輸出電壓0V,卷簾機動作狀態繼續保持;當有物體遮擋時輸出電壓5V,卷簾機動作停止。傳感器模塊主要對周圍環境的溫度和光照強度實時檢測,并將采集數據傳送至CC2530芯片進行處理。其中,光照檢測采用光照度傳感器QY-150B,工作電壓為3.3V,檢測信號接入CC2530核心處理器P0.7口,完成光照檢測;溫度檢測采用DS18B20溫度傳感器及其外部電路實現,數據采集信號與單片機P1.4口相接,實現對溫度的檢測。
2.2控制節點硬件設計
控制節點包括電源模塊、CC2530中心處理模塊及繼電器驅動模塊3部分,主要完成對信號的接收與發送,包括有線和無線的接收與發送。無線主要完成監測終端發送過來的傳感器信息量,再通過TTL轉RS232串口電路將傳感器采集的數據發送至工業控制器;工業控制器通過溫光耦合模型處理過后,給出動作指令,并將命令發送至控制節點的CC2530模塊。
該模塊的核心處理器直接采用具有ZigBee無線通訊功能的CC2530模塊,并且根據ZigBee協議,通過CC2530的射頻模塊無線發送至根節點。CC2530模塊同時作為根節點,主要承擔協調器作用,完成啟動網絡、選擇網絡參數等功能。本設備中有多個終端節點及1個根節點,通過協調器可以使整個系統組網成功。其中,串口電路主要完成數據的轉換與傳遞,控制節點將工控屏的命令轉化為對應的高低電平,通過驅動模塊控制繼電器,實現電機的正轉、反轉和停轉,對應控制卷簾機的卷起和放下。
3 軟件實現方案
3.1監測節點軟件設計
在監測環節中,待開機后,系統首先進行溫度等參量初始化,查看存儲器中是否有上次存儲的信息:如果有則提取已有的網絡信息參數;否則,初始化網絡參數,進行網絡號加1,重新掃描無線網絡,直至加入網絡。一旦加入網絡,系統就開始檢測溫度、光照。溫度值的接收可直接使用單片機的I/O口,對于光照檢測直接采用單片機的AD端口,即可獲取監測數據。
3.2控制節點軟件設計
在控制環節中,首先協調器通過射頻接收函數接收監測節點發送過來的環境參數值,再通過TTL轉RS232串口線發送至工業控制器。工業控制器中嵌入有溫光耦合算法模型,通過算法預測出下一時刻溫度值,判斷該值是否達到溫度控制動作點;然后將控制指令通過串口寫入協調器;協調器得到控制指令,由無線射頻模塊發送數據至控制節點,控制節點接收到數據后通過對單片機I/O口置高低電平,從而實現控制卷簾機的開啟與閉合。
其次,監測節點、協調器和控制節點需要通過ZigBee協議棧組網來實現無線數據傳輸的功能。在協議棧中,以設定的信道和網絡號掃描無線網絡,如果特定網絡號存在,則完成組網,允許其它節點入網。
3.3工業控制器軟件設計
3.3.1溫度預測模型
使用MatLab軟件對歷史溫度數據進行分析,構建預測模型,并將該模型嵌入工業控制器。
為了提高設備控制精度,于2016年1月23-24日在陜西省西安市閻良區武屯鎮西北農林科技大學實驗基地三號棚采集實驗數據,分析數據得出溫光耦合模型,并將其模型嵌入控制模塊,從而實現精準控制。實驗中,利用DS18B20空氣溫度傳感器監測空氣溫濕度,采用QY-150B光照傳感器監測光照值。空氣溫濕度傳感器和光照傳感器布置于室內中心位置,可充分接收光照,監測數據5min上傳1次。
采集實驗數據并上傳至上層服務器,在MatLab軟件中對數據進行處理。首先對各個節點的數據進行預處理,空氣溫度取其平均值;再利用regress函數對1月23日和24日的實驗數據進行擬合,公式為
y=0.1649ω1-1.2666ω2+2.1019ω3-
3.2085×e-5×g+0.0068
(1)
其中,y為從當前時刻開始的5min后的溫度預測值;ω1、ω2和ω3分別為當前時刻溫度值和5min前、10min前的歷史時刻溫度值;g為當前時刻光照值。
實際值與預測值比較如圖2所示。
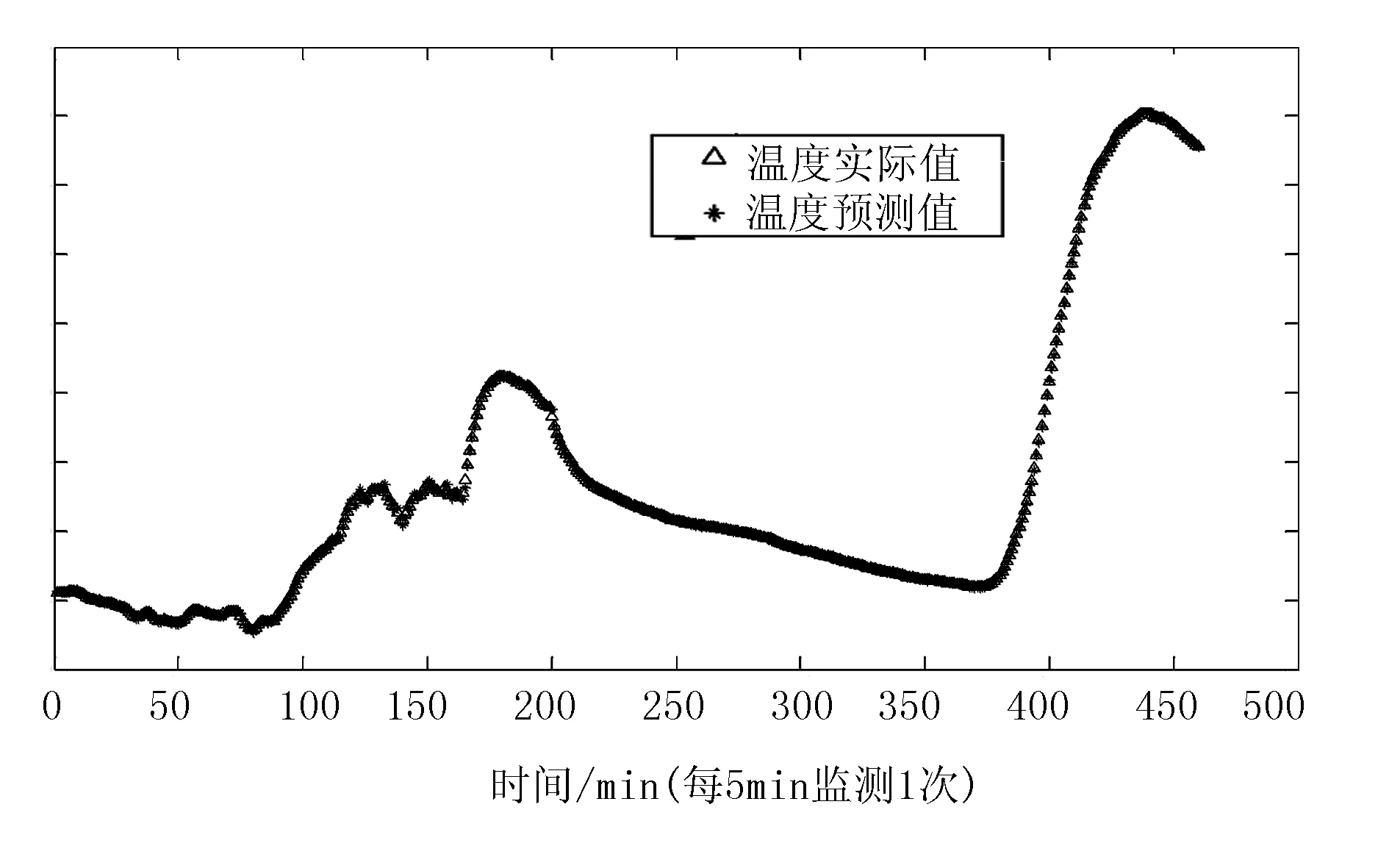
圖2 下一時刻溫度預測
預測絕對誤差,其最大值為0.6℃,最小值為-0.5℃。該預測精度足以達到控制所需精度要求,可為控制提供決策依據。不同植物在不同生長階段所需溫度不同,根據實際作物需求設置溫度上下限,再依據所預測的下一時刻溫度是否處于溫度限制以內,來控制設備動作。
3.3.2工業控制決策算法設計
考慮到實際生活中現場操作人員的受教育程度的差異,本系統利用步科Kinco的ET070工控屏,設計了人機交互的操作系統,使操作更加簡單方便,控制方式更加高效。在通過串口接收傳感器數據之后,在工控屏中對數據分析整合給出決策結果,并將決策結果輸出至控制模塊,指示相應的設備動作。
系統開機后,首先是串口自動進行初始化操作,當初始化完成后,串口實時監測有無數據輸入;接收到的數據將被存儲在相應的寄存器里,直至數據接收完畢,對所接收數據進行有效性判斷;寄存器中的數據主要由空氣溫度及光照強度兩個參數構成,串口處理程序將自動分割數據,并提取相應數據,以供數據處理函數使用;串口不斷自動刷新,等待下一次接收數據。如此循環,直至出現強制中斷或者系統關閉。
工業控制器嵌入決策算法:首先,根據溫光耦合算法對溫度進行預測;然后,根據已知的參數進行決策判斷,將決策值輸出至控制模塊,指示相應的設備動作,實現對卷簾設備的動作精確控制。工控屏輸出前兩個時刻的溫度值、當前溫度值、光照強度值及下一時刻預測值。
工控屏中嵌入的算法邏輯過程為:
1)工控屏通電后,系統開啟初始化,主要對各個控件地址中的數據進行清空,同時打開串口,等待數據傳入。
2)以1s為時間間隔不斷從串口中獲取數據包,如接收到檢測終端的數據包,則進行數據分割提取,并將收到的各個參數顯示在屏幕相應的控件里。
3)利用已經嵌入的光溫耦合算法對溫度進行預測,與植物適宜溫度做比較,對控制終端發出相應指令。在早晨,當前光照強度高于光照閾值,且下一時刻溫度高于溫度閾值,開棚;在傍晚,當前光照強度低于光照閾值,且下一時刻溫度低于溫度閾值,關棚。同時,在工控屏上顯示3個歷史時刻溫度值、下一時刻溫度預測值及當前光照強度。
4)用戶進行工作模式選擇,工作方式由用戶在屏幕上觸碰觸摸按鍵來選擇,控制界面如圖3所示。自動模式下,控制模塊根據工控屏內嵌決策算法直接依照決策結果對設備進行控制,實現全自動控制模式。手動模式下,需要人為根據決策結果對設備進行開或者關的操作。在不同模式時,設備的動作均依據決策模型。

圖3 工控屏顯示界面
5)工作模式選定后,系統自動依據所確定模式中參數設置和當前環境中溫度的值進行運行,程序每秒刷新一次。
6)通過卷簾機的開閉控制室內接收的光輻射,來調控室內溫度。當溫度變化趨勢會持續在最值范圍以內,則可以打開卷簾機,盡量使得室內接收充足光照,保證植物正常的光合作用。
4 系統驗證
本系統已在陜西、重慶、江蘇等的多個日光溫室基地部署使用,穩定運行超過半年。實際運行結果表明:本系統監測部分數據準確率高、誤差小;紅外對射傳感器控制模塊的準確率為100%;人機交互模塊的響應速度低于1s;網絡控制響應速度低于10s。同時,系統在供電正常情況下,無故障運行1 000h以上,統計節省勞動力投入5人次/月。
5 結論
以Kinco-ET070型號的工業控制器為核心處理器,采用具有ZigBee無線通訊協議的CC2530芯片實現無線監測與控制、環境因子的監測和卷簾機的控制;同時結合光溫耦合算法,完成了環境溫度的精確預測調控。實驗表明:本系統運行穩定、性能可靠、操作簡單、安裝成本低,可有效降低農民勞動強度,減少勞動時間,促進設施農業節本增效,滿足小型溫室種植農戶的自動調控需求,對推動設施農業向信息化管理轉變具有重要意義,具有較強的實際應用及推廣價值。
參考文獻:
[1]李洵.北萬高緯地區發展日光溫室新思路[J].北方園藝,1996(6):33-34.
[2]劉曉明.大棚蔬菜生產實現機械化作業的可行性[J].農機科技推廣,2014(3):40.
[3]王龍.基于ARM微處理器的溫室溫濕度測控系統的研究[D]:武漢:華中農業大學, 2011.
[4]馬增煒,馬錦儒,李亞敏.基于WIFI的智能溫室監控系統設計[J].農機化研究,2011,33(2):154-157.
[5]張杰,盧博友,張海輝,等.基于 ZigBee 的溫室卷簾機精準控制系統設計[J].農機化研究, 2013,35(5):77-80.
[6]宋慶恒,劉英德,馬源,等.基于多傳感器數據融合的溫室溫濕度控制系統設計[J].江蘇農業科學, 2015(6):394-396.
[7]余泳昌,薛文芳,馬建民.改進型PID控制算法在現代溫室環境參數控制中的應用[J]. 河南農業大學學報, 1999(2):183-185.
[8]鐘應善,楊家強,鄧勁蓮.溫室溫度和濕度的多變量模糊控制技術[J].農業機械學報,2001,32(3): 75-78.
[9]馮帆,邱立春,劉維佳.模糊控制在溫室溫濕度控制系統中的應用[J].農機化研究,2009,31(6): 148-150.
[10]龍利平,張侃諭.溫室加熱實時專家控制系統研究[J].自動化與儀表,2003,18(3):25-26.
[11]秦琳琳,馬國旗,儲著東,等.基于灰色預測模型的溫室溫濕度系統建模與控制[J].農業工程學報, 2016,32(S1):233-241.
[12]袁洪波,李莉,王俊衡,等.基于溫度積分算法的溫室環境控制方法[J].農業工程學報, 2015,31(11):221-227.
