基于UWB的室內停車場高精度定位系統設計
2018-04-11 09:13:56,,
單片機與嵌入式系統應用 2018年4期
,,
(華中師范大學 物理科學與技術學院,武漢 430079)
引 言
在室內停車場,車速一般被限制在5 km/h以內,即不超過1.39 m/s。所以室內停車場車輛定位系統的定位精度應該達到厘米級別,才能發揮良好的性能。目前,在關于室內停車場車輛定位系統的研究中,絕大部分研究使用的技術為:RFID、藍牙、WiFi、ZigBee、CSS和圖像處理[1-4]等。這些技術存在精度低或實現復雜等問題。然而,超寬帶(Ultra Wide Band, UWB)技術利用納秒至微秒級別的脈沖傳輸數據,其時間分辨率高,在復雜多徑環境中,可以表現出厘米級定位精度。因此,本文將UWB技術運用至室內停車場車輛定位,設計并實現一套UWB定位系統。
由于UWB技術的時間分辨率高,所以它非常適用于基于信號到達時間測距的定位系統[5]。基于到達時間的測距方法分為到達時間(Time Of Arrival, TOA)和到達時間差(Time Difference Of Arrival, TDOA)。其中,TDOA要求所有錨節點之間時間同步,時間同步需要依靠復雜的同步機制或者魯棒的基礎設施來實現,這將導致網絡通信協議復雜或者系統成本增大。因此,本文將采用TOA測距方式。然而,每個器件或多或少存在時鐘漂移,時鐘漂移會給基于TOA的測距結果帶來誤差。為了減少時鐘漂移造成的測距誤差,SSA-TWR、 SDS-TWR等多種基于TOA的測距機制被提出[5]。通過研究比較,本文最終選用SDS-TWR測距機制,并使用優化算法計算距離。
在TOA測距的基礎上,本文采用約束線性最小二乘算法解算標簽位置,該算法在一次最小二乘估計的基礎上,利用其結果包含的估計誤差對標簽位置進行二次估計,從而減小定位結果的誤差。最后通過多項實驗,測試本系統的定位性能。
1 系統設計
1.1 系統框架
定位系統框架如圖1所示。系統包含移動標簽、錨節點和位置解算平臺三部分。本文研究二維定位(實際上不是二維問題,錨節點位置較高,標簽在車上,位置較低, 不在一個平面),標簽與錨節點位于同一個二維平面,錨節點M1和M2所在的直線與M2和M3所在的直線垂直。標簽主動向M1、M2和M3依次發起測距。錨節點M1充當網關,標簽與三個錨節點之間的距離測量值匯集至錨節點M1,由M1通過串口發送至PC端的位置解算平臺。
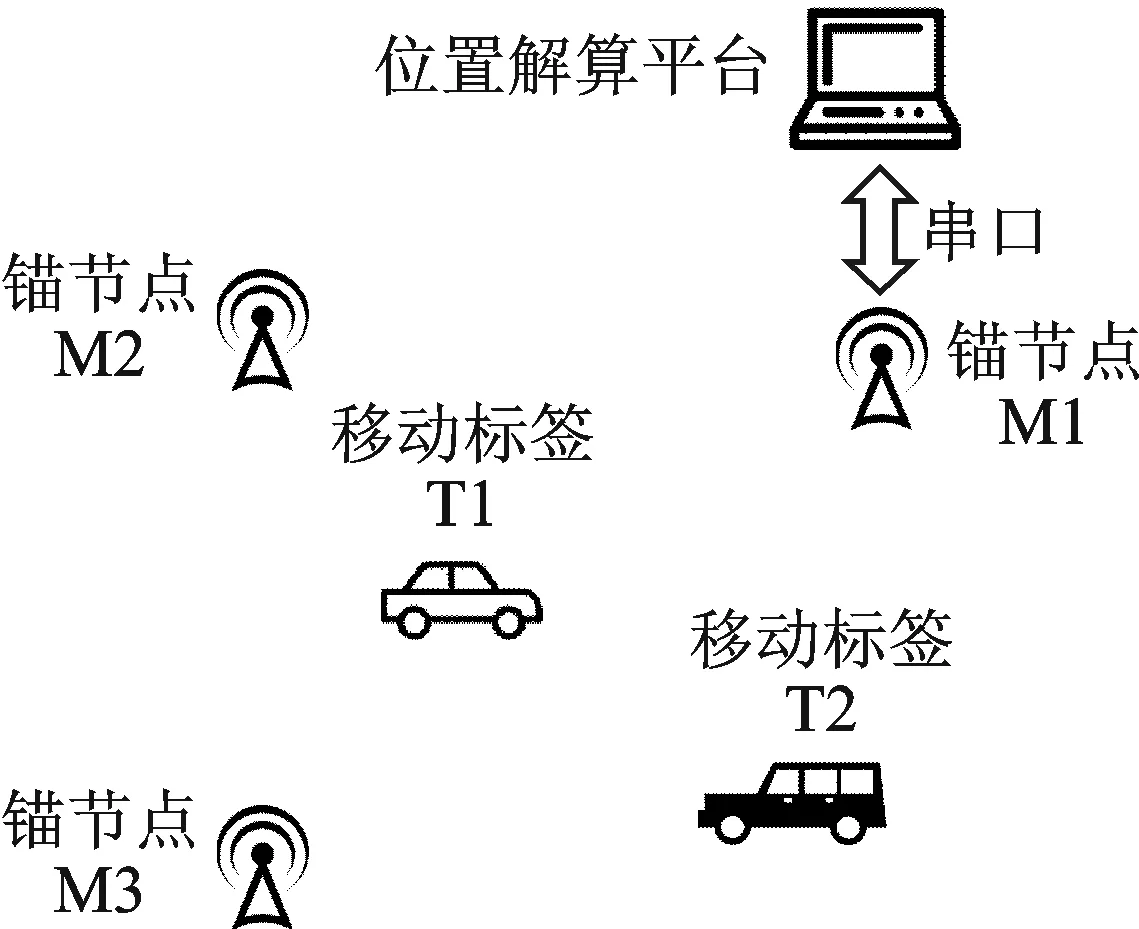
圖1 系統框架示意圖
1.2 時分復用
系統采用時分復用(TDM)技術實現信道共享。根據信道配置決定的單個標簽實現定位所需的最短時長,系統將單個標簽的位置刷新周期劃分成多個時隙。如圖2所示,每個標簽被隨機分配至特定時隙。網關錨節點M1負責監管和保證每個標簽均處于正確的時隙,以免標簽之間發生沖突。當網關節點接收到來自標簽的請求幀,它將核對來自該標簽的請求是否在正確的時隙中被發送。并且,在網關向標簽發送的回復幀中包含該標簽下次發起定位請求的時間。標簽在正確的時隙中依次與錨節點M1、M2和M3進行測距,完成后進入休眠,并在自己的下一個時隙到來時再次被喚醒,與錨節點進行測距。

圖2 多標簽的TDM信道共享機制
1.3 硬件設計
標簽和錨節點的硬件結構框圖如圖3所示。DW1000是DecaWave公司生產的一款UWB無線收發芯片,支持TOA精確測距和定位,調制方式為BPM加BPSK。主控制器STM32F105通過SPI讀寫DW1000,實現數據幀的收發和獲取數據幀發送或接收的時間戳。標簽采用電池供電,錨節點采用USB或者電池供電。錨節點包含串口轉USB模塊,可將距離測量值通過該模塊上傳至PC端的位置解算平臺。
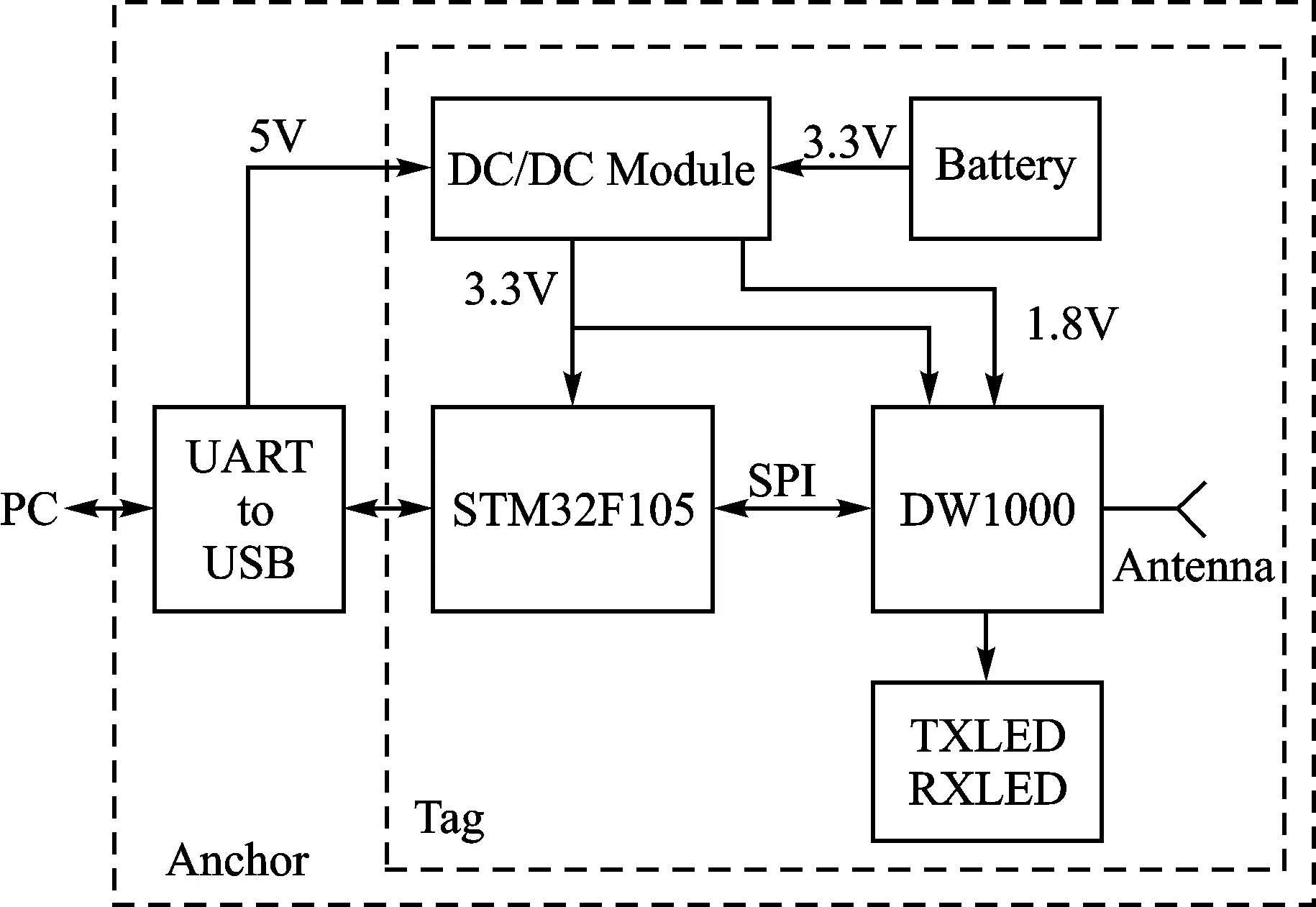
圖3 標簽和錨節點的硬件框圖
1.4 嵌入式程序設計
嵌入式端的程序設計按設備角色分為三部分。如圖4所示,標簽進入定位網絡被分配地址和時隙后開始休眠,只在自己的定位時隙到來時被喚醒,被喚醒后主動向三個錨節點依次發起測距,測距完成后進入休眠狀態,等待下一次被喚醒。如圖5所示,當錨節點監聽到來自標簽的測距請求,立即與標簽完成測距交互,并在本地計算兩者之間的距離值,最后將距離測量值發送至網關節點。如圖6所示,網關節點既要與標簽節點完成測距,又要將所有錨節點和標簽之間的距離信息上傳至PC端位置解算平臺。
1.5 位置解算平臺程序設計
PC端位置解算平臺的主程序流程圖如圖7所示。位置解算平臺成功接收來自網關節點的數據幀后,根據協議解析數據幀并存儲有用信息,利用定位算法函數解算標簽相對于各參考錨節點的位置坐標,并在UI界面上刷新此次定位結果。
2 測距誤差來源與抑制措施
本系統采用基于到達時間的測距方法,根據DW1000記錄的信號離開或到達射頻收發器的時間戳來計算信號飛行時間(Time Of Flight, TOF),信號飛行時間乘以光速得到兩節點之間的距離。時鐘漂移、頻率漂移、接收信號電平和天線延遲均是測距誤差的來源。本文主要討論如何抑制時鐘漂移和修正天線延遲對測距結果的影響,從而減小測距誤差。
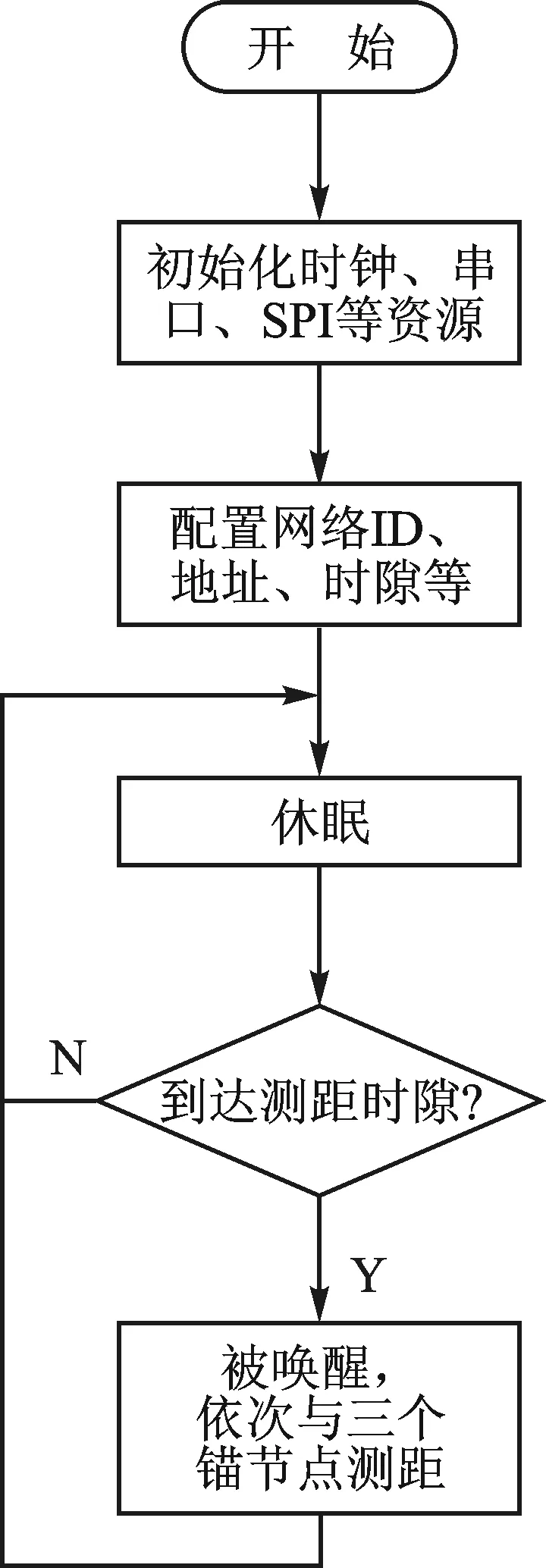
圖4 標簽節點程序流程圖
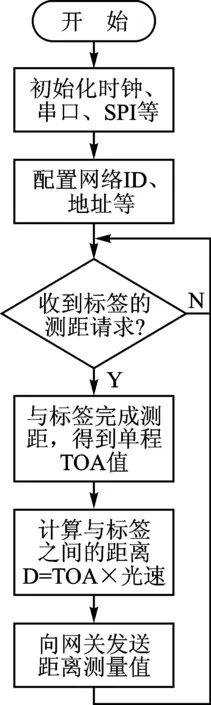
圖5 錨節點程序流程圖
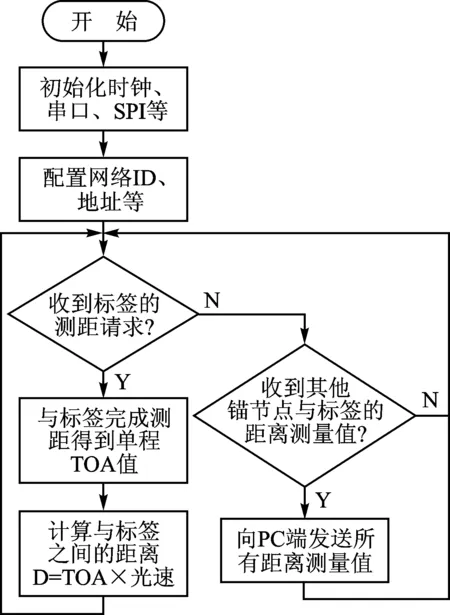
圖6 網關節點程序流程圖
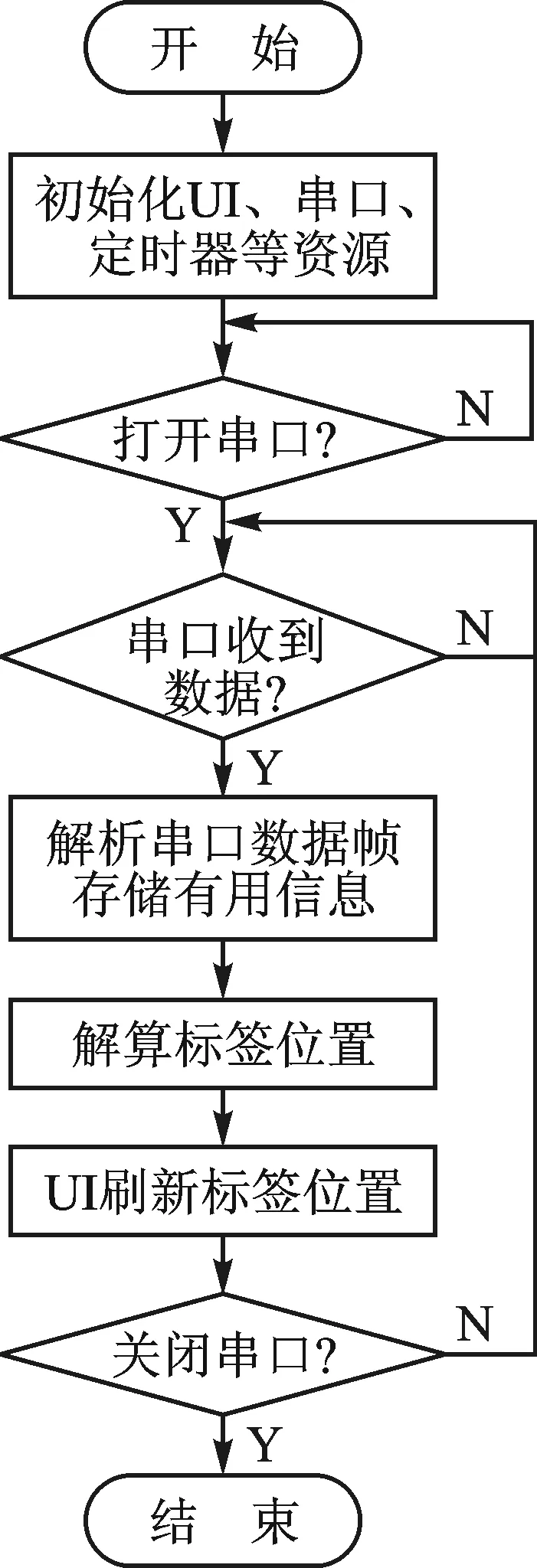
圖7 PC端位置解算平臺的主程序流程圖
2.1 Advanced-SDS-TWR算法減小時鐘漂移帶來的測距誤差
由于設備時鐘的實際頻率相對于標稱頻率存在誤差,所以設備的時鐘發生漂移。假設在短時間內,設備的時鐘漂移不變,并且不考慮量化誤差,那么,設備的本地時間tlocal與真實時間ttrue之間的關系模型[5-8]為:
tlocal=(1+δ)ttrue+μ
(1)
其中,δ是實際頻率相對于標稱頻率的時鐘漂移系數,μ是時鐘的初始偏移量。
現有的多種基于到達時間的測距機制和算法受時鐘漂移影響的程度不同,下面將對比時鐘漂移給圖8中三種典型的測距機制帶來的誤差大小,其中,對圖8(b)所示的SDS-TWR測距機制討論兩種算法,最終從4種算法中選定一款算法用于本系統測距。
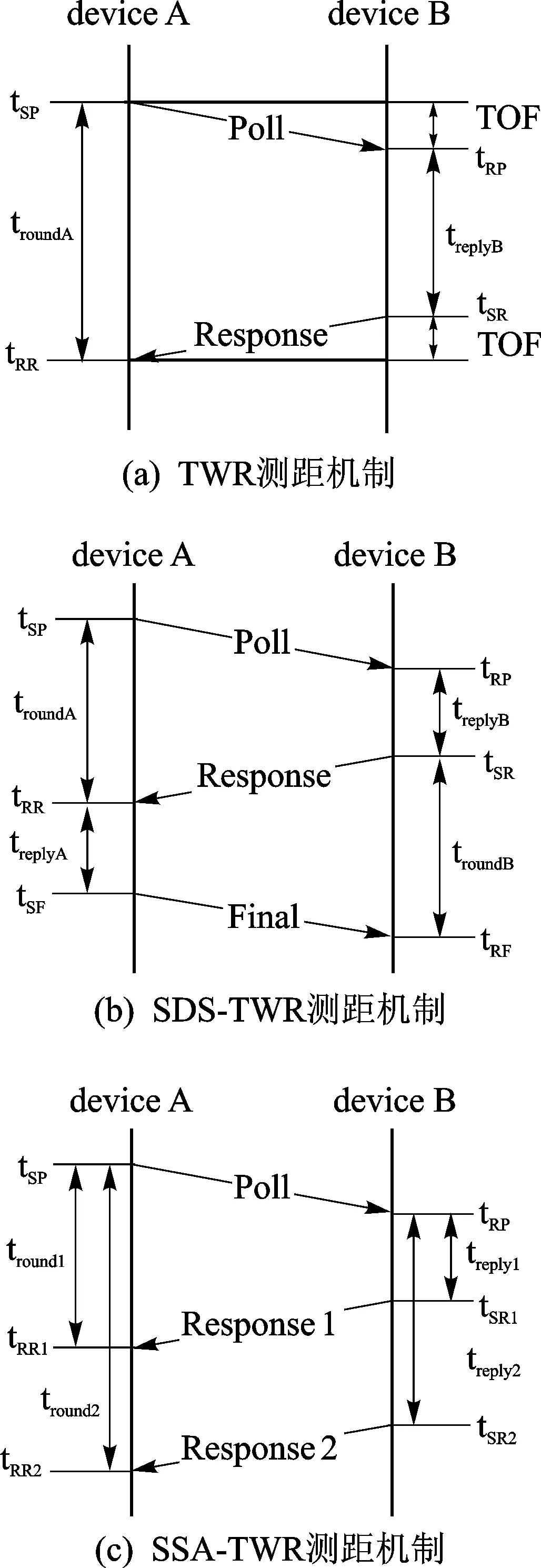
圖8 三種典型的基于TOF的測距機制
如圖8(a)所示,設備A與設備B進行基礎的雙向測距(Two Way Ranging, TWR)。TOF的真實值TOFtrue與測量值TOFtest分別為:
(3)
由式(1)、(2)和(3)可得,
(4)

errorTWR=TOFtest-TOFtrue

(5)
在TWR的基礎上,被普遍運用的測距機制是雙邊雙向對稱測距(Symmetric Double-sided Two Way Ranging, SDS-TWR)。SDS-TWR的測距交互過程如圖8(b)所示,在設備A接收到來自設備B的Response之后,還需向設備B發送Final幀。SDS-TWR機制的兩種TOF算法如式(6)和式(7)所示:
(6)
TOFSDS-TWR_ADVANCED=

(7)
其中,tRoundA=tRR-tSP,tRoundB=tRF-tSR,tReplyA=tSF-tRR,tReplyB=tSR-tRP。
由式(1)和式(6)、式(1)和式(7)分別推導出
(9)
將式(8)和式(9)均減去TOFtrue,得
(11)
同樣可以推導出時鐘漂移給圖8(c)中SSA-TWR測距機制帶來的TOF誤差為:
errorSSA-TWR=δATOFtrue
(12)

2.2 天線延遲校準
DW1000射頻收發器遵循的物理層協議是IEEE802.15.4,物理層幀結構如下所示:

PreambleSFDPHRData
物理層幀包含前導碼(Preamble)、幀界定符(SFD)、幀頭(PHR)和數據(Data)4部分。射頻收發器的內部結構如圖11所示,其由前端模擬部分和后端數字部分組成。根據IEEE802.15.4協議,在射頻收發器發送或接收一幀測距消息時,數字電路將PHR的第一個bit離開或到達數字電路的時刻作為整幀的發送或接收時間戳,也就是說,DW1000射頻收發器測得的時間戳并不是信號離開或到達天線的時刻,其中包含天線延遲。為了獲得信號離開或到達天線的時刻,需要對射頻收發器測得的時間戳進行天線延遲校準。由圖11可知,信號離開和到達天線的時刻的計算公式分別為式(13)和式(14):
tTX=tMSTX+tADTX
(13)
tRX=tMSRX+tADRX
(14)
其中,tTX、tRX分別是信號離開和到達天線的時刻;tMSTX、tMSRX分別是射頻收發器測得的信號發送和接收時間戳;tADTX、tADRX分別是發送和接收時的天線延遲,它們的取值依靠實驗經驗獲得。DW1000射頻收發器
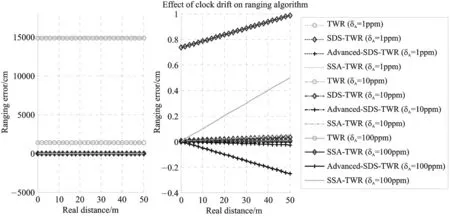
圖9 δA給4種算法的測距結果帶來的誤差大小對比
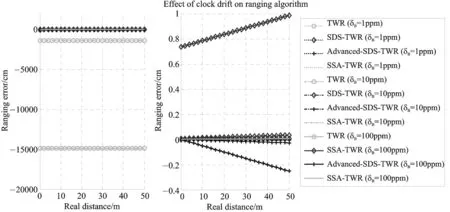
圖10 δB給4種算法的測距結果帶來的誤差大小對比
的驅動程序為天線延遲校準提供了接口,開發者向DW1000的寄存器寫入天線延遲校準參數,DW1000的數字電路在測得幀發送或接收時間戳之后自動校準天線延遲,并修正時間戳,最后將經過修正的時間戳寫入寄存器,主控制器通過SPI讀取寄存器即可獲得信號離開或到達天線的時刻。經過天線延遲校準后,距離測量值更接近真實值。
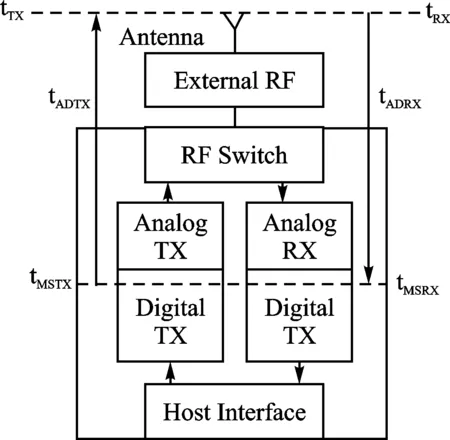
圖11 DW1000射頻收發器示意圖
3 約束線性最小二乘定位算法

ti=(di+ni)/ci=1,2,3
(15)

(16)

i=1,2,3
(17)

Az=b+α
(18)
于是,可以求得z為
z=(ATWαA)-1ATWαb
(19)
其中,
(20)
以上求得的z中包含估計誤差Δz,其值和其方差為:
Δz=(ATWαA)-1ATWαα
(21)
cov(Δz)=(ATWαA)-1
(22)
利用向量z=[xyx2+y2]T元素間的相互約束關系進一步精確估計標簽坐標。假設標簽坐標的精確估計值為[x′y′]T,結合z和Δz可得
(23)

Gu=h+β
(24)
于是,求得u為
u=(GTWβG)-1GTWβh
(25)
其中,
(26)
因此,標簽坐標的精確估計值為
(28)
4 實驗過程及性能分析
為測試本系統的性能,本文在如圖12的室內停車場開展測距實驗和定位實驗。該室內停車場的每個車位長4.75 m,寬2.40 m,兩排車位之間的距離為5.00 m。本文采用均方根誤差(Root Mean Square Error, RMSE)來評價系統的測距精度和定位精度。
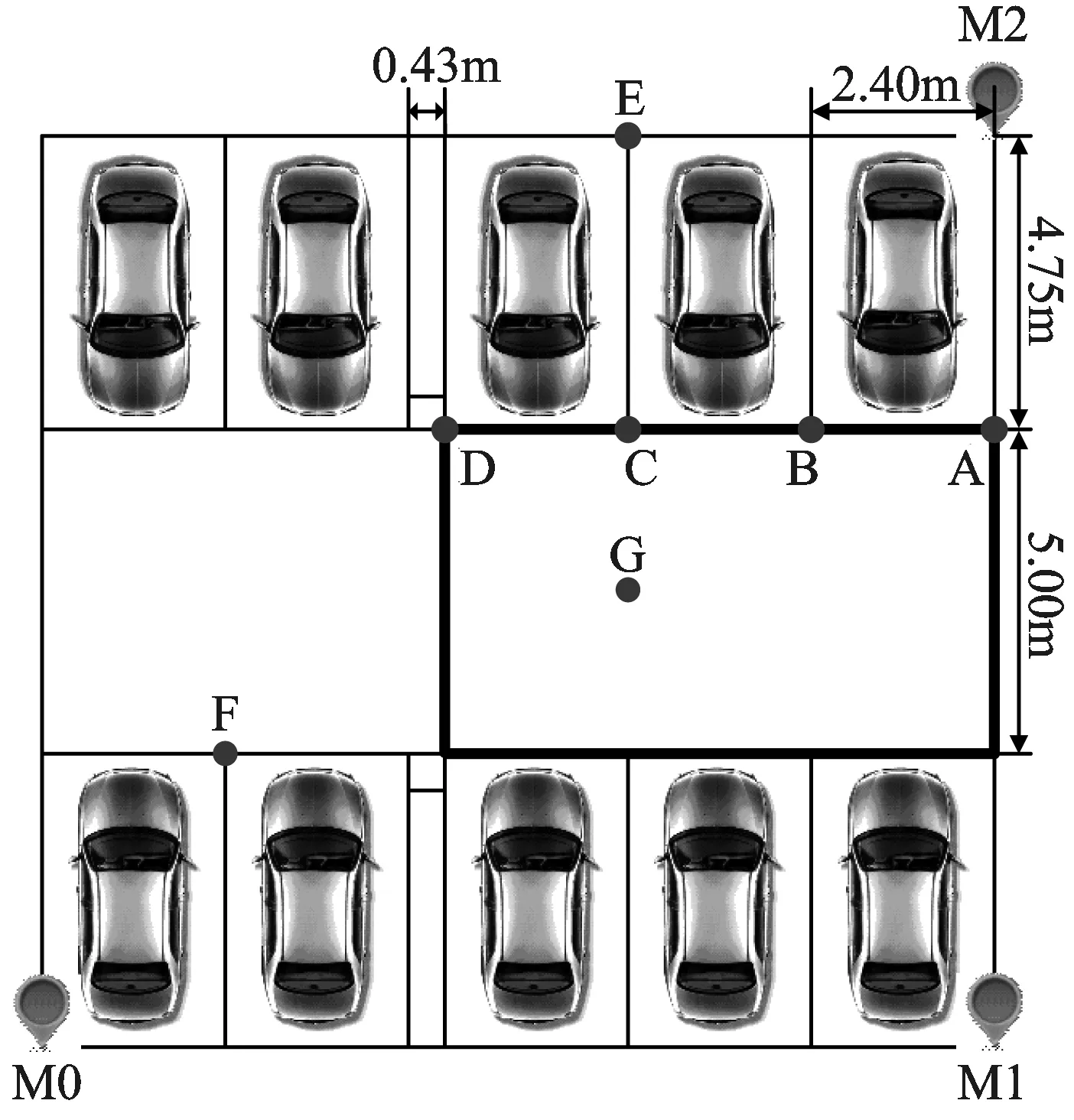
圖12 實驗場地布局圖
4.1 測距實驗
采用定點測距的方式,分別測量圖12中AB、AC、AD、CE 的長度,每個距離測試200次。表1為每個距離的200個測量值的均值、均值相對于真實值的誤差以及RMSE。從表1可以看出,本系統的距離測量結果與真實值之間的誤差小于4 cm, RMSE也小于4 cm,即測距精度均不超過4 cm。
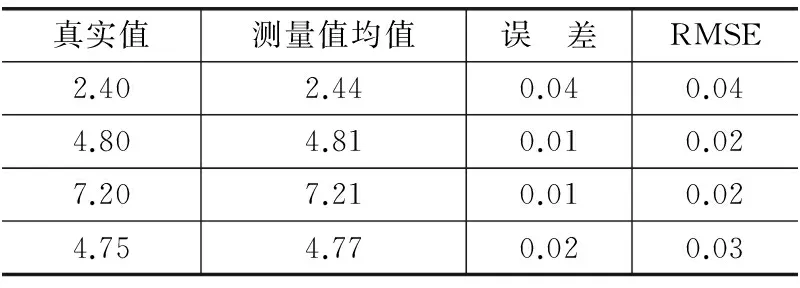
表1 定點測距結果統計表 (單位:m)
4.2 定位實驗
三個錨節點M0、M1和M2依照圖12所示的位置被部署,分別以M0M1、M1M2所在的直線為X軸、Y軸,則M0的坐標為(12.43, 0, 0),M1的坐標為(0, 0, 0),M2的坐標為(0, 14.5, 0)。定位實驗分為定點定位和移動跟蹤兩部分。首先,對圖12中的點B、C、D、F、G進行定點定位,每個點采集200個定位結果,它們的均值、RMSE如表2所列。
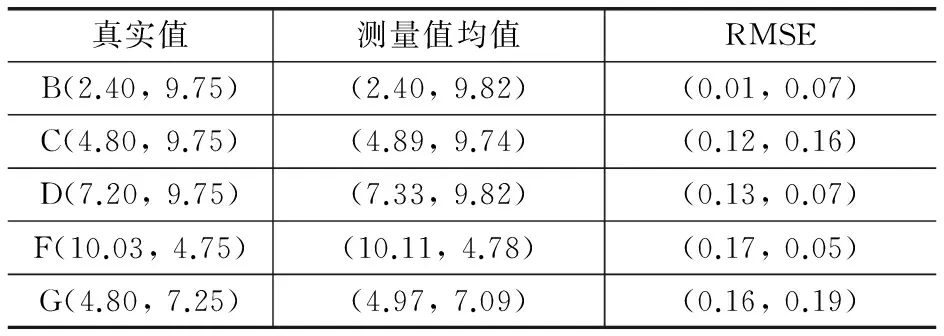
表2 定點定位結果統計表 (單位:m)
從表2可知,定位的測量值均值相對于真實值的誤差不超過20 cm,由RMSE表征的定位精度也不超過20 cm。然后,讓標簽節點沿著圖12中的粗線條軌跡運動,記錄沿途所有定位結果,得到圖13所示的定位軌跡。可以看出,定位軌跡能夠較準確地反映標簽的真實運動軌跡,但存在一些偏差較大的點,定位結果偏差較大的原因可能是標簽在移動過程中,其與錨節點之間的測距信號不穩定,造成測距結果偏差較大,使得定位結果偏離軌跡。總體而言,本系統具有良好的跟蹤效果。
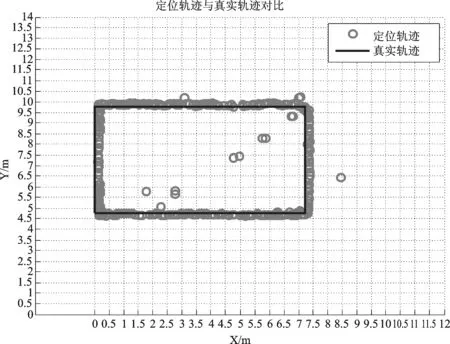
圖13 定位軌跡與真實軌跡對比圖
結 語
本文設計并實現了一套UWB室內停車場定位系統,完成UWB定位系統的硬件設計和軟件設計。分析測距誤差來源,并從時鐘漂移和天線延遲校準角度采取措施,減小測距誤差。運用約束線性最小二乘算法解算標簽位置。測試得到本系統的定位精度達到厘米級別,能夠滿足室內停車場車輛定位的需求。
后續通過更多實驗更精準地調整天線延遲參數,能夠進一步減小測距誤差。并且,將原始測距結果進行預處理后再進行定位,能夠有效防止定位結果偏差較大的突發問題。此外,由于汽車行使過程具有位置連續的特點,后續

[1] 宋英娟.智能停車場車輛RFID定位關鍵技術研究與設計[D].南京:南京郵電大學,2014.
[2] 謝中嘯,韓圣偉.藍牙4.1基站組網的停車場定位系統設計[J].單片機與嵌入式系統應用,2016(3):16-18.
[3] 黃旭,范婧,吳茂念,等.基于Wi-Fi指紋定位技術的智能停車場系統的設計與實現[J].計算機科學,2016,43(s1).
[4] 錢承山,蔣奇峰,茅韻怡,等.基于物聯網技術的智能停車場系統的設計[J].物聯網技術,2016,6(7):26-27.
[5] Mikhaylov K,Tikanm?ki A,Pet?j?j?rvi J,et al.On the seletion of protocol and parameters for UWB-based wireless indoors localization[C]//International Symposium on Medical Information and Communication Technology.IEEE,2016:1-5.
[6] Dardari D,Conti A,Ferner U,et al.Ranging With Ultrawide Bandwidth Signals in Multipath Environments[J].Proceedings of the IEEE,2009,97(2):404-426.
[7] Sivrikaya F,Yener B.Time synchronization in sensor networks: a survey[J].Network IEEE,2004,18(4):45-50.
[8] 周賢偉,韋煒,覃伯平.無線傳感器網絡的時間同步算法研究[J].傳感技術學報,2006,19(1):20-25.
[9] 袁鑫,吳曉平,王國英.線性最小二乘法的RSSI定位精確計算方法[J].傳感技術學報,2014(10):1412-1417.
[10] W Wang,G Wang,J Zhang,et al.Robust Weighted Least Squares Method for TOA-Based Localization Under Mixed LOS/NLOS Conditions[J].IEEE Communications Letters,2017,21(10):2226-2229.
[11] 谷紅亮,史元春,申瑞民,等.一種用于智能空間的多目標跟蹤室內定位系統[J].計算機學報,2007,30(9):1603-1611.
陳旻哲(碩士研究生),主要研究方向為嵌入式應用開發;熊誠(碩士研究生),主要研究方向為嵌入式系統;劉守印(教授),主要研究方向為通信系統及物聯網。