基于PC-crash的直接線性變換法車速誤差修正模型
2018-04-11 03:41:06何烈云
實驗室研究與探索 2018年1期
何 烈 云
(浙江警察學院 交通管理工程系,杭州 310053)
0 引 言
隨著CCD圖像傳感器技術成熟和制作工藝的提升,當前使用的非量測數碼攝像機的感光芯片采用的是CCD圖像傳感器[1]。CCD攝像機可直接獲得數字影像并輸入計算機進行處理,建立攝像機圖像中的點與空間物體表面點相互之間的對應關系,這一過程稱為攝像機標定[2]。Abdel-Aziz等在上世紀70年代提出直接線性變換(Direct Linear Transformation,DLT)法,不需要內、外方位元素,可直接建立二維像片影像坐標和相應物點物方空間坐標之間幾何關系,非常適用于非量測CCD攝像機的標定[3]。運用DLT,再現交通事故中目標車輛運行軌跡和車速等數據,是實現交通事故現場信息重構的一種有效途徑[4]。DLT測算交通事故中目標車輛的行駛速度與傳統的目標車輛參照物法、道路環境參照物法、虛擬參照物法相比[5-7],具有靈活方便、受時空影響小及具備描繪目標車輛空間軌跡的功能。但在實踐中發現,DLT測算目標車輛行駛速度精度沒有優勢,若坐標標定點和目標車輛特征點選取不當,行駛速度測算精度不高[8-11]。
隨著數碼技術的發展,數碼攝像設備成像質量不斷提升,因攝像頭成像質量引起的誤差也越來越小,對近景攝影中目標車輛車速影響基本可以忽略。矩陣實驗室—Matlab(Matrix Laboratory)軟件在矩陣運算方面強大的功能,因算法對DLT精度影響也可忽略不計。實踐表明,影響DLT車速測算誤差:① 由于人為的測量誤差引起的偶然誤差,即物方坐標系中點測量誤差、像方坐標系點像素坐標測量誤差,這類誤差是無法避免的,在實踐中可以進行多次測量求平均值方法提高精度;② 由于目標車輛不同特征點測算速度與車輛行駛速度差異引起的誤差,這類誤差屬于系統誤差,誤差值具有一定的單向性[12]。本文對DLT車速測算系統誤差形成的機理進行了分析、提出了修正系數模型,并運用仿真實驗,對系統誤差修正系數模型的可行性進行了驗證。
1 系統誤差修正模型構建
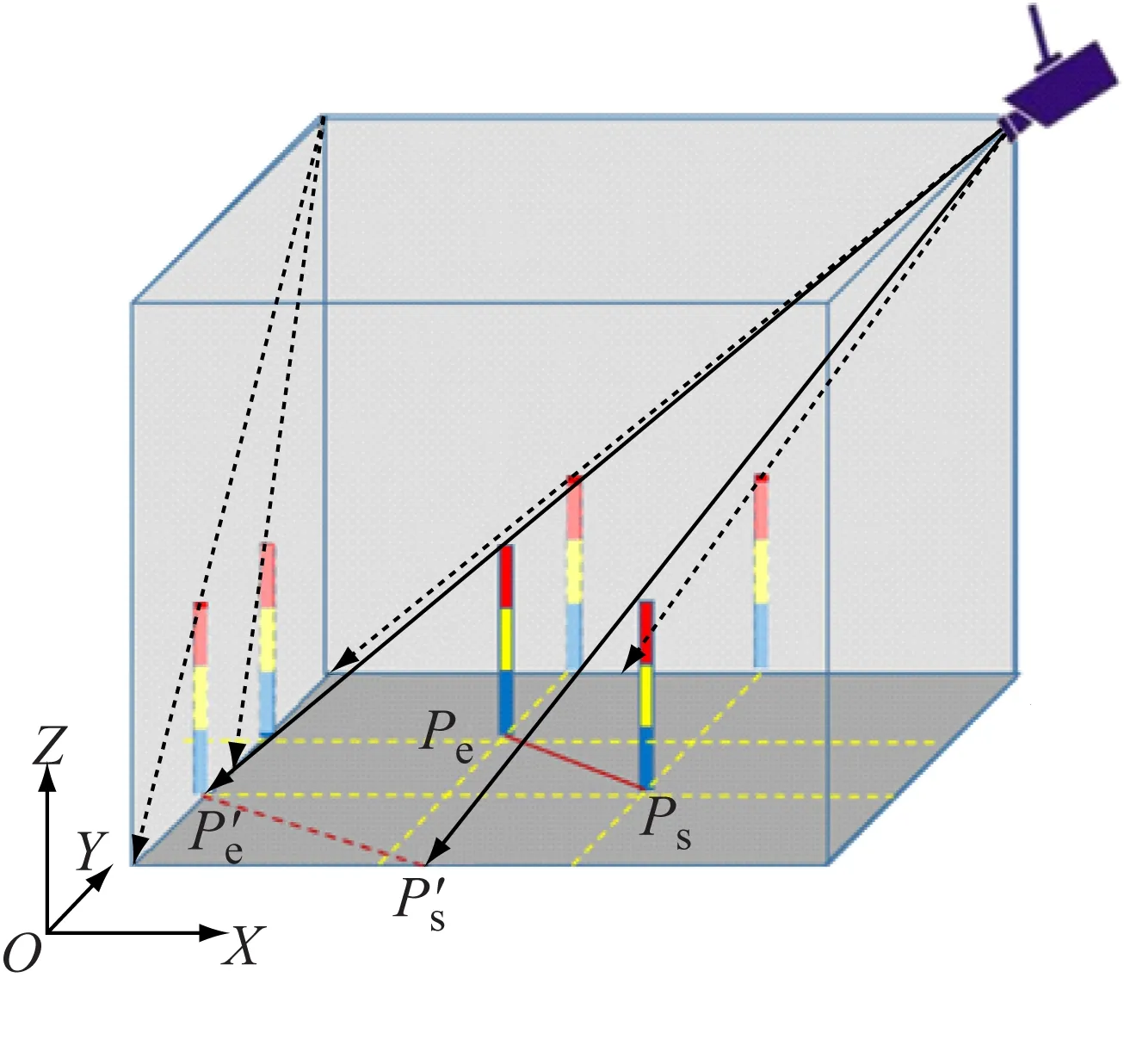
攝像機成像實質是根據透鏡成像原理,把三維空間投影到二維像平面的過程,人們可以借助二維像素坐標點(x,y)獲取三維空間坐標點(X,Y,Z)相關信息[13]。為了方便車輛特點選取而引起的誤差分析,將汽車簡化成與xOy平面垂直的桿子模型,構建如圖1所示的分析圖。


(1)
[(y1+Δy1)-(y2+Δy2)]2}1/2
(2)
假設攝像頭光心距離地面的高度為H;桿子的高度為h,則:
結合式(1)、(2)可知:
s′=Hs/(H-h)
(3)
令修正系數:
k=H/(H-h)
由式(3)可知,選取桿子上下2個不同端點為特征點時,車輛實際行駛速度v與DLT測算車速v′滿足關系:
v=v′/k
(4)
當攝像頭固定,系數k大小取決于特征點離地面的高度h。
由于在攝像機標定時坐標測量誤差、攝像機畸變、計算時數值近似等因素引起的誤差,用相對誤差ε表示,這種誤差會對所有測算車速造成單向的影響,可以視為系統誤差。在實驗數據處理時可以使用該相對誤差值對測算車速進行補償,提高精度。綜合以上公式,得到誤差修正模型表達式:
(5)
2 PC-crash仿真實驗驗證
為了驗證式(5)誤差修正模型的是否可行,在實車DLT車速測算實驗中,由于實驗結果受到道路的線形、實驗用車速度穩定性、駕駛員操控水平、車輛測速儀的精度、攝像機拍攝操作、人為測量誤差等變量共同的影響,難以對單一變量的影響做出定量及定性的分析。為有效克服這些缺點和不足,可采用仿真實驗的方法。
2.1 仿真實驗
仿真實驗不受時間、空間限制[14],完全排除實驗過程中的過失誤差,盡量減少偶然誤差。而且在實驗過程中方便控制某些變量,對單一變量變化對結果的影響進行研究分析,這是實車實驗無法實現的。運用PC-crash軟件[15]開展DLT車速測算仿真實驗時,① 利用軟件自帶的道路模型工具建立理想的道路模型,靈活地在道路上施劃交通標線,設置交通標志和其他的道路環境參照物體;② 根據對比實驗需要對導入的設置車輛外觀尺寸參數、調整車輛行駛狀態進行設置;③ 靈活設置攝像機的分辨率、位置、焦距及相機傾角等實驗參數。PC-crash軟件道路、車輛和攝像機重要參數設置窗口如圖2所示。
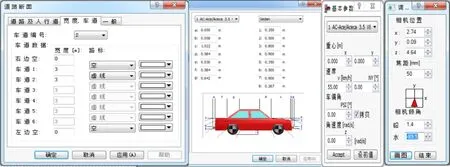
圖2 實驗參數設置窗口
2.2 實驗設計
實驗時構建一條雙向6車道平直道路,每條車道寬度為3.5 m;道路上施劃車行道分界線、白色車道分界線的線段及間隔長度分別為60 cm和90 cm;斑馬線長度、寬度及相鄰間隔分別為6 m、40 cm和1 m;道路兩旁的燈柱間距12 m。實驗車輛選擇PC-crash車庫模型中的豐田卡羅拉(Toyota corolla)車型,車子的長寬高為4 630 mm×1 775 mm×1 485 mm。實驗時設置車輛以60 km/h速度作勻速直線運動;攝相機離地高度5 m,相機傾角鉛直方向為-11.6°、水平方向為-152.3°。在PC-crash中生成并導出仿真視頻,設置視頻幀頻率為25幀/s、視頻圖像分辨率為1 360×768,圖3為仿真實驗視頻截圖。
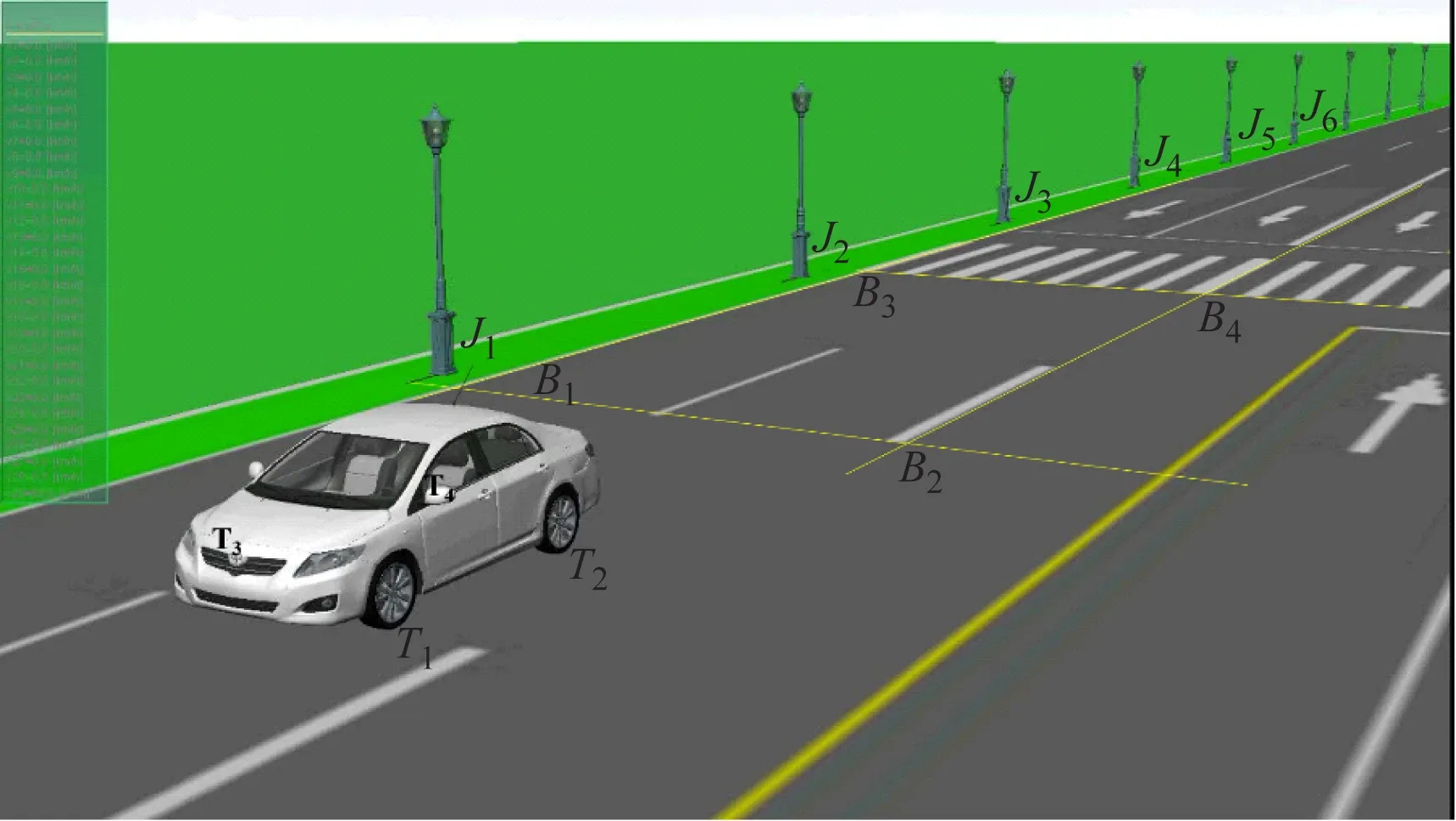
圖3 仿真實驗視頻截圖
圖3中B1~B4為4個坐標標定點;T1~T4為實驗車輛選取的4個待測的特征點,其中點T1為左前輪與地面接觸點,T2為左后輪與地面接觸點,T3為車前頭車標中心點,T4為左后視鏡中間點;J1~J6路邊燈柱底座的相機標定偶然誤補償點,相鄰兩點間距恰為燈柱間距12 m。以B1點為坐標原點,B1B2和B1B4為坐標軸建立物方坐標和像方坐標,各標定點物方坐標和像方坐標如表1所示。將表1數據代入式(2),運用Matlab程序計算得出虛擬相機li8個參數值,分別為:
l1=-0.132 548 386 111 6
l2=-0.069 943 246 558 9
l3=-0.000 457 189 161 4
l4=-0.469 197 827
l5=0.611 631 368 845 054
l6=-0.027 843 792 367 3
l7=227.672 380 551 601
l8=-196.053 896

表1 標定點坐標值

表2 攝像機標定相對誤差
以車輛T1~T4為4個特征點,截取相互間隔20幀的4個關鍵幀F1~F4,如圖4所示。
測算車輛相鄰關鍵幀特征點平均速度v1~v4結果如表3所示。

圖4 仿真實驗視頻圖像疊加效果圖
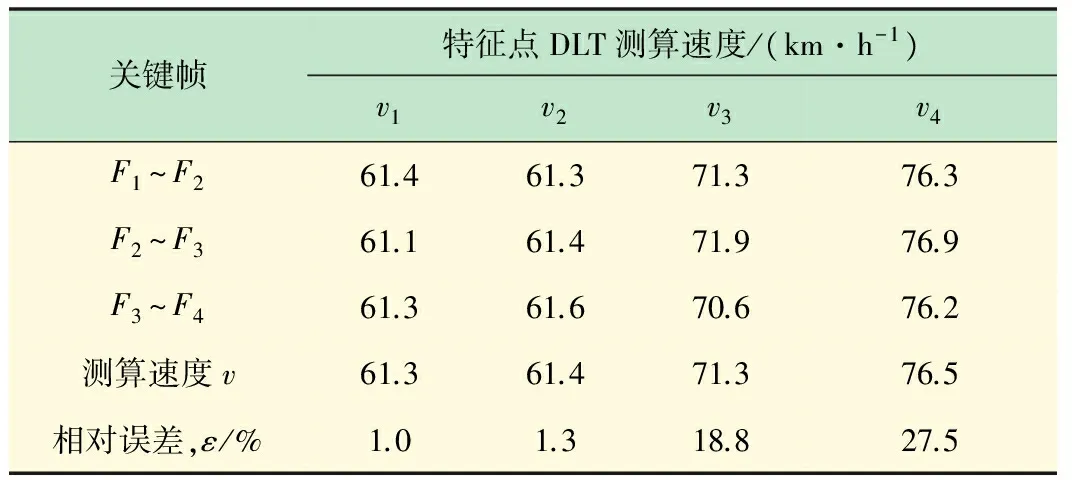
關鍵幀特征點DLT測算速度/(km·h-1)v1v2v3v4F1~F261.461.371.376.3F2~F361.161.471.976.9F3~F461.361.670.676.2測算速度v61.361.471.376.5相對誤差,ε/%1.01.318.827.5
3 仿真實驗驗證結論
分析表3中實驗數據,可得到以下結論:
(1) 車速測算值誤差值與目標車輛所處區域無直接關系,在選取關鍵幀時,只要確保特征點處在視頻圖像明視范圍即可;數據還表明在攝像機標定時,攝像機參數精度不受標定點所圍區域、相機傾斜角影響。
(2)T1、T2測算速度和車輛實際行駛速度相對誤差只有1.0%左右,該誤差主要是由于測量特征點的像方坐標測量時人為因素造成。
(3)T3、T4測算速度比車輛實際行駛速度大,而且特征點距地面高度差越大,速度差越大。
根據豐田卡羅拉(Toyota corolla)車型外觀、實驗參數設計值,將表3補償后車速運用修正模型(5)進行修正,結果如表4所示。
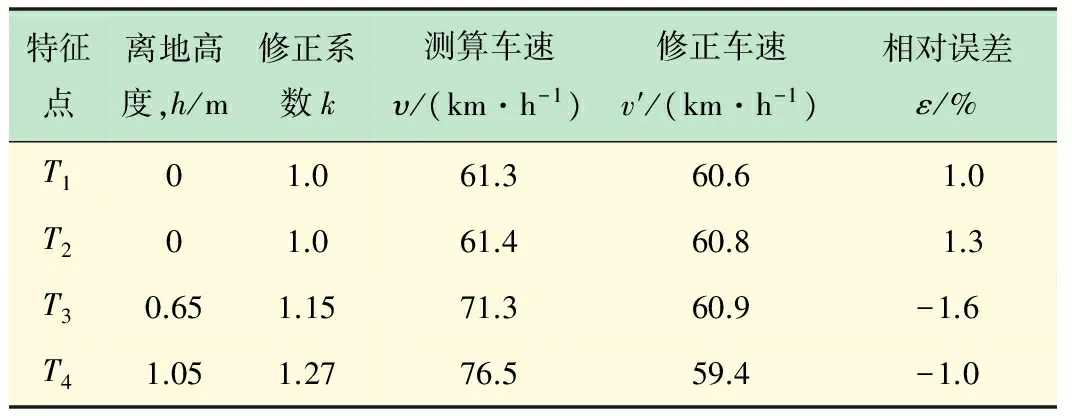
表4 修正車速和相對誤差
通過仿真實驗表明,車輛不同特征點DLT測算車速度有差異,但對結果進行修正后不同特征點速度與實際車速度非常接近,驗證了修正模型正確性和現實可行性。
4 結 語
DLT在再現交通事故中目標車輛的行駛速度時,會因車身特征點選取不當而造成車速測算誤差較大。理論分析和仿真實驗表明,在DLT車速測算時,可以通過測算目標車輛車身其他任一點的速度,運用修正系數對該點測算速度進行修正,進而得到目標車輛的行駛速度。引入修正系數模型,可以大大提高了DLT車速測算的精度和靈活度,為夜間目標車輛車速精確測算提供了理論依據和操作方法。在實踐中,可以運用修正系數模型中各變量之間關系,推測出攝像機的安裝高度、成像物體上任一點空間高度。
參考文獻(References):
[1]王曉濤,王緒安,康寧. CCD攝像機新型光控技術研究[J]. 紅外與激光工程,2016,45(1):0120003-1-0120003-6.
[2]趙高長,武風波,周彬,等. 基于DLT模型的攝像機標定簡化方法[J]. 應用光學,2009,30(4):585-589.
[3]魯光泉,李一兵.基于普通數碼相機的交通事故攝影測量技術及其研究進展[J].交通運輸工程與信息學報,2005(3): 63-67.
[4]陸玉凱,金先龍,侯心一. 數字攝影測量技術在交通事故再現中的應用[J].計算機輔助設計與圖形學學報,2005,17(10): 2318-2322.
[5]何烈云.基于視頻處理技術車輛定位法的研究[J].武漢理工大學(交通科學與工程版),2014,38(2):469-471.
[6]靳慧云,李苑,謝賢能,等.監控視頻中目標車輛速度被動式測量方法研究[J].測繪通報,2012(8):47-50.
[7]何烈云.幀間差分法車速測算技術誤差分析與處理[J].中國人民公安大學學報(自然科學版),2014(1):56-59.
[8]曾友,高健,岑譽.視覺技術的中心定位誤差方法研究[J]計算機仿真,2015,32(7):264-267.
[9]嚴韶華,陳道清,郭平波. DLT直接解法與迭代解法的討論[J].工程勘查,1989(5):68-70.
[10]鄒崢嶸. 坐標差DLT與DLT解法的比較[J].四川測繪,1995,19(2):59-60.
[11]杜召彬,鄒向東. 基于滅點的透視校正和空間定位的方法研究[J]. 四川理工學院學報(自然科學版),2011,24(1):105-108.
[12]陳濤,丁星兵,何仲華,等. 基于視頻建立的車速分析數學模型的誤差研究[J].公路交通科技(應用技術版),2015(7):254-256.
[13]韓學源,金先龍,張曉云,等. 基于視頻圖像與直接線性變換理論的車輛運動信息重構[J].汽車工程,2012,34(12):1145-1149.
[14]易紅.高校實驗教學與創新人才培養[J].實驗室研究與探索,2008(2):1-4.
[15]何烈云.基于PC-Crash軟件側翻交通事故再現實驗方法研究[J].實驗技術與管理,2015,32(12):135-139.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03
