基于單片機液位控制系統(tǒng)的研究與設(shè)計?
2018-03-31 06:04:51張小娟常豪豪
艦船電子工程 2018年3期
張小娟 高 蕊 常豪豪
1 引言
在現(xiàn)代工業(yè)生產(chǎn)過程中,容器中料位狀態(tài)往往決定著所要生產(chǎn)的產(chǎn)品質(zhì)量的高低。容器中物料的狀態(tài)一般有料位,溫度、濃度[1]等都十分重要,所以研究生產(chǎn)過程這些控制量對于生產(chǎn)過程自動化實現(xiàn)往往具有十分重要的意義。以液位為研究對象,生產(chǎn)過程[2]中一般要保障容器里的原料、產(chǎn)品或半成品的數(shù)量,來確定生產(chǎn)過程各環(huán)節(jié)物料平衡以及為進行經(jīng)濟核算,首先應(yīng)該有能夠檢測該容器液位的裝置提供的依據(jù),另外還有可靠的控制方式來改變?nèi)萜髟系臄?shù)量;以及對液位的實時測量,掌握液位在規(guī)定的波動范圍內(nèi)波動情況,進而及時調(diào)整正常生產(chǎn)狀態(tài)[3]。液位測量在工業(yè)生產(chǎn)過程中已經(jīng)的格外重要而且逐漸成熟。特別是對液位測量,能夠幫助確定液位或物位的高度,實現(xiàn)數(shù)字化和智能化接軌以便于其他工作的有序進行。
2 系統(tǒng)的總體方案設(shè)計
本系統(tǒng)是基于單片機的超聲波液位[4]測控系統(tǒng)主要由單片機、時鐘、復(fù)位電路組成的最小系統(tǒng)和測溫、按鍵電路、超聲波模塊、顯示、報警及控制電路等組成。硬件系統(tǒng)的框圖如圖1所示。
本裝置在使用范圍內(nèi),根據(jù)使用場合先確定探頭距容器底部安裝高度,然后設(shè)定液位波動范圍,后投入運行,在運行時也可設(shè)定液位波動范圍,此時電機被自鎖不會動作,系統(tǒng)會給予狀態(tài)提示,設(shè)置完畢退出設(shè)置模式后電機恢復(fù)正常執(zhí)行。

圖1 超聲波液位測量系統(tǒng)框圖
3 超聲波液位測控系統(tǒng)
3.1 超聲波測液位原理
超聲波液位[5]測量的原理也就是基于測距原理,即是超聲波探頭測到距液面的距離,如果超聲波探頭經(jīng)過特殊處理安裝在容器的底部時,測得的距離就為液位的實際高度,如果探頭安裝到容器液面的上方,需要通過單片機換算來得到液位高度(液位的高度為超聲波探頭相對于容器底部距離減去實際測到的距離),本設(shè)計考慮到實際應(yīng)用的方便性,選擇把超聲波探頭裝到容器液面的上方。同時,本設(shè)計兼有按鍵切換測距功能。
此系統(tǒng)的實現(xiàn)算法原理設(shè)計由圖2參考可知,液位換算公式:

式中:H為探頭到所測容器底部的距離,需要安裝好完后提前測量;S為本系統(tǒng)在工作過程中探頭到實時液面所測得到的距離;h即為所要檢測的液位。

圖2 測液位原理
3.2 電機控制原理
液位控制之前首先要確定現(xiàn)場容器液位[6]允許波動的范圍,在安裝完成之后可以通過鍵盤設(shè)定其液位的上下限,然后系統(tǒng)投放運行后,由單片機根據(jù)實時采集到液位高度控制電機工作及其狀態(tài)指示,即當液位低于下限時,給于狀態(tài)提示以及順時打開電機,當高于下限在液位波動范圍內(nèi),狀態(tài)燈關(guān)閉以及電機反轉(zhuǎn)關(guān)閉。當液位高于上限,目前只提供狀態(tài)提示可為以后擴展用。
本系統(tǒng)工作基本流程圖如下:
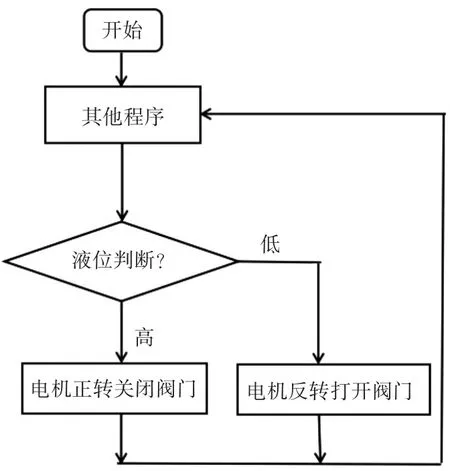
圖3 電機控制原理
4 系統(tǒng)主要硬件設(shè)計
4.1 單片機最小系統(tǒng)電路
單片機可以用最少的外圍電路所搭建起來的可以工作的電路系統(tǒng)被稱為最小應(yīng)用系統(tǒng),一般可稱為單片機的最小系統(tǒng)。51系列單片機最小系統(tǒng)一般應(yīng)該有單片機、電源、時鐘和復(fù)位電路構(gòu)成。
4.2 超聲波測距模塊
HC-SR04為超聲波測距[7]集成化模塊,非常簡便好用,此模塊共有4只引出腳,從左往右,第一只腳VCC為工作電壓為5V和單片機共用同一電源;第二只腳TRIG為輸入觸發(fā)信號,接在單片機的P3.6腳;第三只腳ECHO為輸出回響信號,接在單片機的P3.7腳;第四只腳GND為接地端,如圖4實物及規(guī)格。
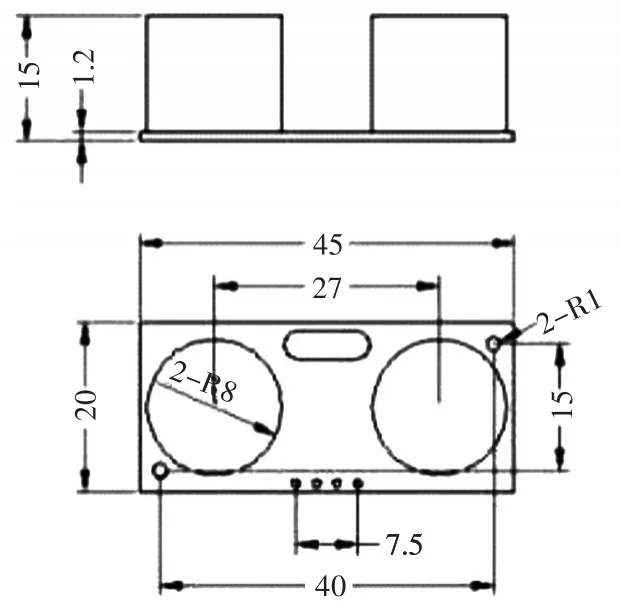
圖4 實物圖規(guī)格
HC-SR04超聲波模塊是已包含發(fā)射、接收和控制電路,可提供4cm~400cm檢測距離范圍,而且精度可高達3mm,使用起來比較簡單。其超聲波時序圖如圖5。

圖6 超聲波時序圖
本次設(shè)計系統(tǒng)控制電路主要有步進電機,驅(qū)動電路和狀態(tài)指示燈組成。狀態(tài)指示燈即是對操作過程,以及工作狀態(tài)的指示作用,讓本系統(tǒng)操作更具人性化;驅(qū)動電路即可以提高電機的負載能力;將電機轉(zhuǎn)動情況作為模擬閥門的動作機構(gòu)的狀態(tài),其特點是可以將電脈沖信號轉(zhuǎn)換為角度(模擬水泵的開度)的機電式數(shù)模轉(zhuǎn)換器。
5 系統(tǒng)軟件設(shè)計
5.1 系統(tǒng)軟件編譯開發(fā)環(huán)境
Keil軟件[8]當前是單片機程序開發(fā)最熱的軟件,其功能強大,可用于C語言程序、匯編源程序的編寫和調(diào)試等。本次設(shè)計,將使用μVision4版本作為軟件編程開發(fā)環(huán)境,來完成程序編寫及調(diào)試。
5.2 超聲波模塊操作過程
超聲波[9~11]模塊通過接收到單片機發(fā)送的觸發(fā)脈沖信號,模塊自動的發(fā)送和接收超聲信號,同時將測到的脈沖寬度反饋給單片機,讓其計算時間。如果距離過遠或沒有接收到返回信號,單片機內(nèi)部給予溢出處理,1602顯示屏并顯示888.8作為錯誤判斷。部分程序如下:
/*============================================
HC-SRO4超聲波測距模塊DEMO程序
校驗數(shù)據(jù)
最小測距時間0.04m/340=117.647us lcd顯示 2cm
4/340=11764.706 us 200cm
8/340=max23529.412 us 400cm
/***********計算顯示距離函數(shù)**************/
void Conut(uint lev)
{
Table1[0]=lev/1000+0x30;//顯示百前值
4wei
Table1[1]=lev%1000/100+0x30;//顯示十前值
Table1[2]=lev%100/10+0x30; //顯示個前值
Table1[3]='.'; //顯示當前值
Table1[4]=lev%10+0X30; //顯示h前值
if(Table1[0]=='0')
{Table1[0]=''; //如果百位為0,不顯示
if(Table1[1]=='0')
{
Table1[1]=''; //如果百位為0,十位為0也不顯示
}
}
se=lev/10;// 3wei se=S/10;
wr_com(0x89);
wr_dat(Table1[0]); //顯示百位
wr_com(0x8a);
wr_dat(Table1[1]); //顯示十位
wr_com(0x8b);
wr_dat(Table1[2]); //顯示個位
wr_com(0x8c);
wr_dat(Table1[3]);
wr_com(0x8d);
wr_dat(Table1[4]);
}
6 系統(tǒng)制作及仿真調(diào)試
本設(shè)計使用此軟件創(chuàng)建工程,然后進行程序編寫,程序調(diào)試完成后生成。HEX文件作為單片機可執(zhí)行程序,調(diào)試結(jié)果如圖7所示。
單片機可執(zhí)行文件即二進制機器代碼,對應(yīng)于用Keil軟件編譯過后的生成的。HEX文件,仿真結(jié)果,例如P3.7假如用一個頻率一定的脈沖來代替,檢測其脈寬時間,即是HC-SR04模塊引腳ECHO返回信號的輸出,顯示P3.7口信號的產(chǎn)生情況。
校驗數(shù)據(jù):
假設(shè)在(15℃下)聲速340m/s測量,則根據(jù)原理要測到的脈寬時間t應(yīng)為
LCD顯示2cm,t=0.04m/340/1.0851=108.42μs;
LCD顯示20.0cm,t=0.4m/340/1.0851=1084.2μs;
LCD顯示200cm,t=4m/340/1.0851=10842μs。
當 t=0.4m/340/1.0851=1084.2μs時,仿真結(jié)果圖如圖8所示。

圖7 Proteus仿真結(jié)果
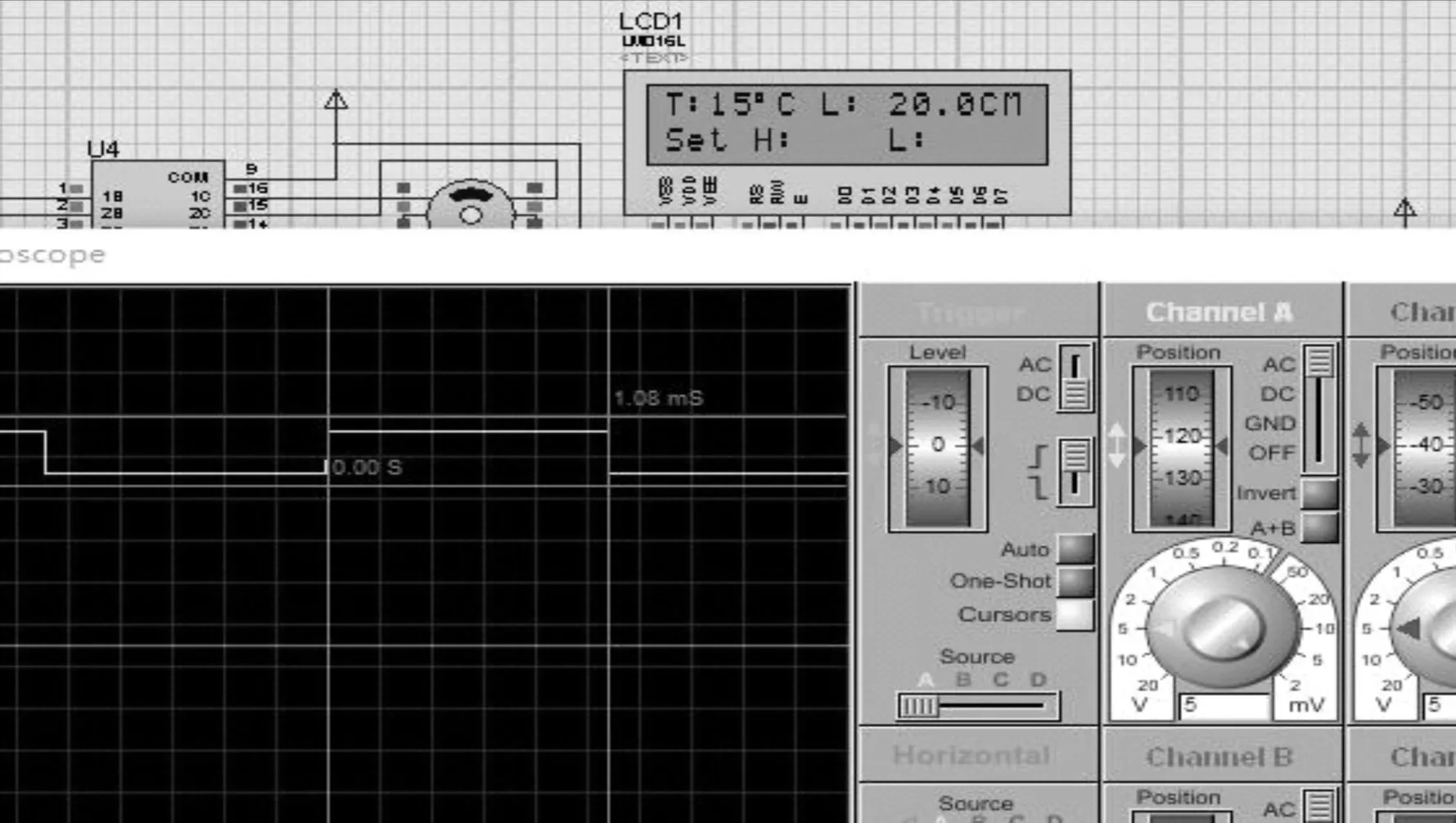
圖8 波形時間及結(jié)果
從上圖看出,P3.7口輸出了信號脈寬時間1.08ms,LCD1602顯示正確,軟件仿真結(jié)果說明設(shè)計信號采集與理論相符,非常準確;然后控制部分,通過按鍵設(shè)定液位波動范圍,模擬液位越限情況,發(fā)現(xiàn)結(jié)果與理論相符。
7 結(jié)語
本此課題為液位[12]測控系統(tǒng)的研究與設(shè)計,在設(shè)計中,本系統(tǒng)由STC89C52單片機搭建的最小系統(tǒng)系統(tǒng)和超聲波傳感器模塊、4個鍵盤、DS18B20、LCD1602顯示、報警系統(tǒng)和步進電機等外設(shè)組成,具有設(shè)置上下限、超限報警、自動控制步進電機(模擬閥門的開度)等功能。在運行的時候,系統(tǒng)會根據(jù)現(xiàn)場的液位控制要求來判斷,液位低于下限時,系統(tǒng)打開外接水泵進行注水,直到液位[13]符合現(xiàn)場控制要求時停止。另外為了提高了系統(tǒng)的測量精確度,使其具有一定的抗干擾能力,STC89C52單片機需要通過對超聲波所處的環(huán)境溫度進行采樣,依據(jù)其在空氣中傳輸?shù)年P(guān)系,然后進行數(shù)據(jù)處理及控制,來達到聲速的補償,超聲波液位檢測模塊測量精度達到3mm。
[1]胡皓.單容水箱液位控制研究[J].新技術(shù)新工藝,2012(12):88-90.
[2]張宗強.基于Java Applet的液位PID控制仿真[J].工業(yè)控制計算機,2011(9):28-30.
[3]聶朋,麻永林,邢淑清,姜濤,孫彬彬.基于LabVIEW的電磁波峰焊非接觸液位測量系統(tǒng)[J].傳感器與微系統(tǒng),2016(8):108-110.
[4]孫娟.基于DSP的超聲波液位計的研制[D].南京:南京信息工程大學(xué),2005.
[5]溫晶晶,任立宗.在工業(yè)容器領(lǐng)域超聲波液位測量技術(shù)的現(xiàn)狀和發(fā)展趨勢[J].中北大學(xué)學(xué)報,2007(21):124-126.
[6]劉樹東,潘萬平.基于步進電機的閥門閉環(huán)控制的仿真[J].煤炭技術(shù),2010(5):47-49.
[7]高飛燕.基于單片機的超聲波測距系統(tǒng)的設(shè)計[J].信息技術(shù),2005(7):128-129.
[8]何小英.基于Keil和Proteus的單片機課程改革[J].中國機械,2014(13):49-50.
[9]席細平,馬重芳,王偉.超聲波技術(shù)應(yīng)用現(xiàn)狀[J].山西化工,2007(1):25-29.
[10]賀瑞強,王民.基于AT89S51單片機的超聲波測距系統(tǒng)的設(shè)計與研究[J].榆林學(xué)院學(xué)報,2009(2):54-56.
[11]常小凱.基于一種高精度超聲波測距儀的研究[J].科技創(chuàng)新與應(yīng)用,2013(24):40-45.
[12]樊秀云,袁嗣杰,張合敏.偽碼數(shù)字相關(guān)在超聲波測距中的應(yīng)用[J].裝備指揮技術(shù)學(xué)院學(xué)報,2002(3):77-80.
[13]梁子劍.淺析超聲波傳感器及其應(yīng)用[J].商情,2013(35):35-36.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
測控技術(shù)(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
汽車維護與修理(2015年2期)2015-02-28 12:15:41
