微型旋翼無(wú)人機(jī)在水蝕外業(yè)調(diào)查中的應(yīng)用
2018-03-29 03:14:58曾麥脈楊健新劉超群俞國(guó)松
水土保持通報(bào) 2018年1期
曾麥脈, 楊健新, 劉超群, 俞國(guó)松
(1.珠江水利委員會(huì) 珠江流域水土保持監(jiān)測(cè)中心站, 廣東 廣州 510611;2.珠江水利委員會(huì) 珠江水利科學(xué)研究院, 廣東 廣州 510611)
主要的水蝕評(píng)價(jià)方法可以分為3類,分別是抽樣調(diào)查、遙感調(diào)查、無(wú)縫隙網(wǎng)格估算[1]。中國(guó)主要采用抽樣調(diào)查和遙感調(diào)查的方法,截至2015年,中國(guó)開(kāi)展了4次大規(guī)模的水土流失普查工作,其中,20世紀(jì)50年代開(kāi)展的第一次普查采用的是人工調(diào)查的辦法,20世紀(jì)80年代開(kāi)展的第2次普查和1999年開(kāi)展的第3次普查采用的是遙感調(diào)查的方式[2],2011年全國(guó)第一次水利普查中的水土流失普查采用的是抽樣調(diào)查結(jié)合土壤侵蝕方程模型定量計(jì)算的方法[3]。
各種水蝕評(píng)價(jià)方法都需要外業(yè)調(diào)查環(huán)節(jié),以采集樣本或驗(yàn)證數(shù)據(jù)。特別是在抽樣調(diào)查方法中,外業(yè)調(diào)查的任務(wù)尤為艱巨。一方面體現(xiàn)在工作量大,消耗時(shí)間長(zhǎng),另一方面體現(xiàn)在工作難度大,數(shù)據(jù)準(zhǔn)確度和精度難以控制。本文擬通過(guò)微型旋翼無(wú)人機(jī)及攝影測(cè)量技術(shù)的應(yīng)用,來(lái)改進(jìn)水蝕外業(yè)調(diào)查技術(shù)。
1 現(xiàn)有外業(yè)調(diào)查方法的不利因素
在水利普查工作中,水蝕野外調(diào)查單元的基本調(diào)查流程為:首先在內(nèi)業(yè)準(zhǔn)備調(diào)查底圖,打印出來(lái);實(shí)地調(diào)查時(shí)根據(jù)GPS、地形等位置參考,勾繪地塊,填寫(xiě)調(diào)查表格;回到內(nèi)業(yè)后重新清繪地塊邊界,掃描后再數(shù)字化錄入。
該外業(yè)調(diào)查工作存在2方面不利因素: ①工作量大,外業(yè)調(diào)查工作的效率難以提高。首先,由于調(diào)查單元的布設(shè)為抽樣平均分布,不考慮交通條件,很多情況下,調(diào)查單元的到達(dá)就需要很長(zhǎng)時(shí)間,某些時(shí)候由于河流和地形的阻隔,雖然直線距離已經(jīng)很近,卻需要繞道很遠(yuǎn)的距離。然后,到達(dá)調(diào)查單元后,需要逐地塊進(jìn)行勾繪,這個(gè)過(guò)程耗費(fèi)時(shí)間較長(zhǎng),特別是地塊破碎的平地區(qū)域。由于經(jīng)費(fèi)的制約,野外調(diào)查單元布設(shè)的密度受限,對(duì)最終成果的精確性,形成了負(fù)面影響。 ②難以準(zhǔn)確勾繪地塊邊界。在現(xiàn)場(chǎng)勾繪的過(guò)程中,可以提供邊界參考的是地形圖和GPS位置。對(duì)于等高線稀疏的區(qū)域,地形圖的參考作用會(huì)大大削弱,而坡面峽谷區(qū)域,人員往往難以到達(dá),無(wú)法用GPS位置確定邊界。從而使邊界勾繪的誤差難以控制和評(píng)估,進(jìn)而增加了最終成果的不確定性。
在抽樣調(diào)查方法中,使用調(diào)查單元的數(shù)據(jù)來(lái)推算區(qū)域內(nèi)的數(shù)據(jù),所以調(diào)查單元調(diào)查的準(zhǔn)確性、布設(shè)的密度對(duì)結(jié)果的可靠性影響重大。當(dāng)前外業(yè)調(diào)查工作的模式,在工作量和準(zhǔn)確性方面都對(duì)項(xiàng)目的開(kāi)展形成了制約性因素。外業(yè)調(diào)查環(huán)節(jié)的技術(shù)革新,將有效的促進(jìn)抽樣調(diào)查方法在水土流失評(píng)價(jià)中的應(yīng)用。
2 微型旋翼無(wú)人機(jī)外業(yè)調(diào)查方法
微型旋翼無(wú)人機(jī)產(chǎn)品和攝影測(cè)量技術(shù)的發(fā)展[4],為外業(yè)調(diào)查技術(shù)的革新創(chuàng)造了條件。使用無(wú)人機(jī)在高空連續(xù)拍攝具有一定量重疊度的照片,覆蓋調(diào)查單元區(qū)域。利用攝影測(cè)量技術(shù),得到三維模型,進(jìn)而得到正射影像和DEM數(shù)據(jù)[5-6]。利用無(wú)人機(jī)航拍獲得正射影像數(shù)據(jù),本質(zhì)是將無(wú)人機(jī)航拍的照片處理成具有空間地理信息的影像數(shù)據(jù)等產(chǎn)品,其中的一項(xiàng)關(guān)鍵技術(shù)是空三解算,屬于航空攝影測(cè)量技術(shù)領(lǐng)域。在航測(cè)領(lǐng)域,為生產(chǎn)符合要求的產(chǎn)品,對(duì)相機(jī)內(nèi)方位元素、鏡頭畸變、飛行姿態(tài)相關(guān)的外方位元素、航線架構(gòu)、地面控制點(diǎn)布設(shè)等方面都有比較高的要求。而消費(fèi)級(jí)的微型無(wú)人機(jī),如大疆的精靈系列無(wú)人機(jī),體積小、質(zhì)量輕、使用非量測(cè)相機(jī)、飛行高度低,雖然可以獲得比較高的分辨率,但是影像畸變和姿態(tài)角大、像幅小、基高比小,使之難以滿足傳統(tǒng)攝影測(cè)量空三解算規(guī)范要求。融合了計(jì)算機(jī)視覺(jué)相關(guān)技術(shù)成果的基于多視圖幾何的空三解算方法的出現(xiàn),克服了傳統(tǒng)攝影測(cè)量對(duì)大傾角影像空三解算的局限性,使消費(fèi)級(jí)的微型無(wú)人機(jī)在水蝕單元外業(yè)調(diào)查中的應(yīng)用成為了可能。
2.1 航測(cè)流程
利用微型旋翼無(wú)人機(jī)開(kāi)展水蝕野外調(diào)查單元的外業(yè)調(diào)查工作,一項(xiàng)主要任務(wù)是利用無(wú)人機(jī)拍攝的照片,生產(chǎn)正射影像及三維模型等數(shù)據(jù),其航攝工作流程包括任務(wù)規(guī)劃、數(shù)據(jù)獲取、數(shù)據(jù)處理等3項(xiàng)。
2.1.1 任務(wù)規(guī)劃 根據(jù)所需成果影像的比例尺需求,逐一確定地面分辨率、無(wú)人機(jī)飛行高度、攝影基準(zhǔn)面、影像重疊率、攝影基線等內(nèi)容。
以DJI Phantom 3 Advance無(wú)人機(jī)系統(tǒng)為例,其搭載的航拍相機(jī)的傳感器為1/5.84 cm(1/2.3英寸)SONY EXMOR,f/2.8(20 mm等效焦距),照片像素分辨率4 000×3 000,在200 m的高度時(shí),所拍攝影像的空間分辨率優(yōu)于0.1 m,符合1∶1 000成圖比例尺對(duì)影像地面分辨率的要求[7],可以滿足水蝕調(diào)查單元地塊劃分和信息提取的需要。微型旋翼無(wú)人機(jī)拍攝高度與拍攝范圍、分辨率等關(guān)系如表1所示。

表1 Phantom3 Advance無(wú)人機(jī)系統(tǒng)拍攝高度與分辨率關(guān)系
注:傳感器實(shí)際尺寸6.16 mm×4.62 mm; 轉(zhuǎn)化系數(shù)5.619; 數(shù)據(jù)為單張照片拍攝范圍。
攝影基準(zhǔn)面用于明確影像分辨率所對(duì)應(yīng)的平面,從而明確飛行高度相對(duì)于起飛點(diǎn)的相對(duì)航高。通常以測(cè)區(qū)的平均高程面作為攝影基準(zhǔn)面。考慮到生產(chǎn)三維模型的需求,一般航向重疊率、旁向重疊率分別在80%和60%左右。攝影基線指相鄰兩曝光點(diǎn)相機(jī)中心的連線。攝影基線的長(zhǎng)度可由確定的影像重疊率、航高和影像的像幅尺寸計(jì)算獲得,該項(xiàng)參數(shù)用于確定相機(jī)的拍照間隔。現(xiàn)代的地面站軟件可以自動(dòng)規(guī)劃航線并計(jì)算大部分的參數(shù),用戶只需要設(shè)定拍攝區(qū)域、地面分辨率、航向與旁向重疊率等參數(shù)即可。
2.1.2 數(shù)據(jù)獲取 主要包括影像數(shù)據(jù)的獲取和地面控制點(diǎn)數(shù)據(jù)的獲取,影像數(shù)據(jù)獲取主要考慮天氣和起降場(chǎng)地的要求,然后將規(guī)劃好的航線數(shù)據(jù)傳輸至無(wú)人機(jī)飛控系統(tǒng),起飛無(wú)人機(jī)獲取影像數(shù)據(jù)。之所以選擇旋翼無(wú)人機(jī)就是因?yàn)槠鋵?duì)起降環(huán)境要求低,而微型旋翼無(wú)人機(jī)成本低,運(yùn)輸使用方便,受空域監(jiān)管制約小,是適應(yīng)于本應(yīng)用的機(jī)型。
地面控制點(diǎn)用于控制成果位置精度。在傳統(tǒng)測(cè)繪行業(yè)中,往往需要大量的地面控制點(diǎn)來(lái)保障測(cè)繪精度等級(jí)。但是在利用無(wú)人機(jī)小區(qū)域航測(cè)數(shù)據(jù)基于多視圖幾何空三解算時(shí),在算法原理上對(duì)構(gòu)網(wǎng)方式的穩(wěn)健性提供了一定程度的保障,根據(jù)李明慈[8]的試驗(yàn),在四周和中間布設(shè)5個(gè)平高控制點(diǎn)即可滿足1∶1 000的成圖比例尺對(duì)空三解算精度的要求。即便如此,測(cè)量地面控制點(diǎn)都是一項(xiàng)繁重的工作。考慮到調(diào)查的空間抽樣性,絕對(duì)定位精度的偏差對(duì)抽樣特性的影響不大,可以不布設(shè)地面控制點(diǎn)。必要的時(shí)候,可以用基準(zhǔn)影像進(jìn)行影像至影像的配準(zhǔn)[9]。
航拍的數(shù)據(jù)成果最少包括2項(xiàng): ①按所需重疊率采集到的航拍照片; ②每個(gè)拍照點(diǎn)的GPS位置信息(照片EXIF文件中或獨(dú)立文件保存)。在設(shè)備支持的情況下,還可能有俯仰、橫滾、航向等外方位角數(shù)據(jù)。拍照點(diǎn)位置與角度數(shù)據(jù)的精確程度,對(duì)最終成果的位置精度起著重要作用。(例如極飛C 2000測(cè)繪微型旋翼無(wú)人機(jī),集成了RTK,在無(wú)地面控制點(diǎn)的情況下,正射影像成果的位置精度可以達(dá)到分米級(jí))。
2.1.3 數(shù)據(jù)處理 利用集成了多視圖幾何空三解算方法的軟件,對(duì)航拍的數(shù)據(jù)成果進(jìn)行自動(dòng)化的處理,通過(guò)幾何處理、多視匹配、三角網(wǎng)(TIN)構(gòu)建、自動(dòng)賦予紋理等步驟,生成三維模型、正射影像、DEM等數(shù)據(jù)成果。基于多視圖幾何的空三解算方法可以解決微型無(wú)人機(jī)影像相對(duì)定向中存在的姿態(tài)角過(guò)大的問(wèn)題,在自檢校光束法平差環(huán)節(jié)可以推算出影像外方位元素、物方點(diǎn)坐標(biāo)和平差后的相機(jī)文件,所以對(duì)于消費(fèi)級(jí)的微型旋翼無(wú)人機(jī),即使航拍數(shù)據(jù)成果中沒(méi)有拍照點(diǎn)的外方位角數(shù)據(jù),也沒(méi)有精確的相機(jī)鏡頭檢校數(shù)據(jù),也可以推算出相關(guān)參數(shù)并生產(chǎn)最終成果。正是數(shù)據(jù)處理技術(shù)的進(jìn)步,使得微型旋翼無(wú)人機(jī)的行業(yè)泛測(cè)繪的應(yīng)用成為了可能。該類處理軟件有PhotoMesh,Context Capture(原Smart3 D),Photoscan等。
2.2 水蝕調(diào)查單元無(wú)人機(jī)外業(yè)調(diào)查
結(jié)合水蝕調(diào)查單元信息采集需求,水蝕調(diào)查單元外業(yè)調(diào)查流程可分為調(diào)查區(qū)航測(cè)、特征照片航拍、數(shù)據(jù)處理、信息提取幾個(gè)部分。調(diào)查區(qū)航測(cè)的目的是生產(chǎn)正射影像圖以及輔助的三維實(shí)景模型數(shù)據(jù),用于勾繪地塊、提取土地利用類型、植被覆蓋度、工程措施、部分生物措施與耕作措施等信息。以大疆無(wú)人機(jī)和平板端的地面站軟件系統(tǒng)為例,調(diào)查區(qū)航測(cè)以水蝕調(diào)查單元為航測(cè)區(qū)域,將調(diào)查單元邊界矢量文件導(dǎo)入地面站軟件,設(shè)置地面分辨率10 cm左右,航向重疊率80%,旁向重疊率60%,自動(dòng)生成航線規(guī)劃(如圖1),檢查測(cè)區(qū)內(nèi)的飛行安全條件,上傳航線,自動(dòng)完成航線飛行與拍攝后返航。若中途電量不夠,自動(dòng)返航更換電池后繼續(xù)完成后續(xù)航線。期間應(yīng)觀察圖傳實(shí)時(shí)影像,了解區(qū)域狀況,發(fā)現(xiàn)水保措施,明確需要開(kāi)展特征照片航拍的區(qū)域。

圖1 地面站軟件導(dǎo)入調(diào)查單元邊界后自動(dòng)規(guī)劃的航線示例
特征照片航拍的目的是對(duì)正射影像上難以準(zhǔn)確提取或者需要更精細(xì)細(xì)節(jié)的信息進(jìn)行補(bǔ)充拍攝,主要包括植物與作物種類、工程措施細(xì)節(jié)等。調(diào)查區(qū)航測(cè)任務(wù)完成后即可銜接開(kāi)展特征照片航拍,在第一視角手動(dòng)模式下,根據(jù)航測(cè)時(shí)對(duì)測(cè)區(qū)地物和措施的觀察,確定拍攝目標(biāo),降低飛行高度,調(diào)整拍攝角度,近距離拍攝對(duì)象照片。
數(shù)據(jù)處理階段,首先利用無(wú)人機(jī)數(shù)據(jù)處理軟件,生成調(diào)查區(qū)正射影像和實(shí)景三維模型數(shù)據(jù),將正射影像數(shù)據(jù)加載到GIS工具軟件,用于后續(xù)信息提取,三維模型數(shù)據(jù)用于輔助判斷坡面措施類型,如梯田。其次,將拍攝的特征照片導(dǎo)入到GIS工具軟件,以照片中的坐標(biāo)信息生成點(diǎn)狀要素,在正射影像上定位照片所在位置,可隨時(shí)點(diǎn)擊查看特征照片。
信息提取階段有2項(xiàng)任務(wù):一是勾繪調(diào)查地塊,二是提取調(diào)查信息。根據(jù)0.1 m分辨率的正射影像,可以很容易的將空間上連續(xù)、土地利用類型相同、林(草)地郁閉度/蓋度相同、水土保持措施相同的地塊劃分出來(lái)(如圖2)。與現(xiàn)場(chǎng)勾繪相比,精確度和效率都有了質(zhì)的提升,并且可根據(jù)影像追溯質(zhì)量。調(diào)查信息的提取包括4個(gè)方面:土地利用、生物措施、工程措施和耕作措施。土地利用、生物措施的類型、灌草的蓋度、工程措施類型等可以在0.1 m分辨率的正射影像上結(jié)合三維實(shí)景模型目視解譯;林地的郁閉度和蓋度、工程措施質(zhì)量等需要結(jié)合特征照片觀察后明確;耕作措施在通過(guò)特征照片觀察作物種類后結(jié)合地域特征來(lái)判斷(表2)。
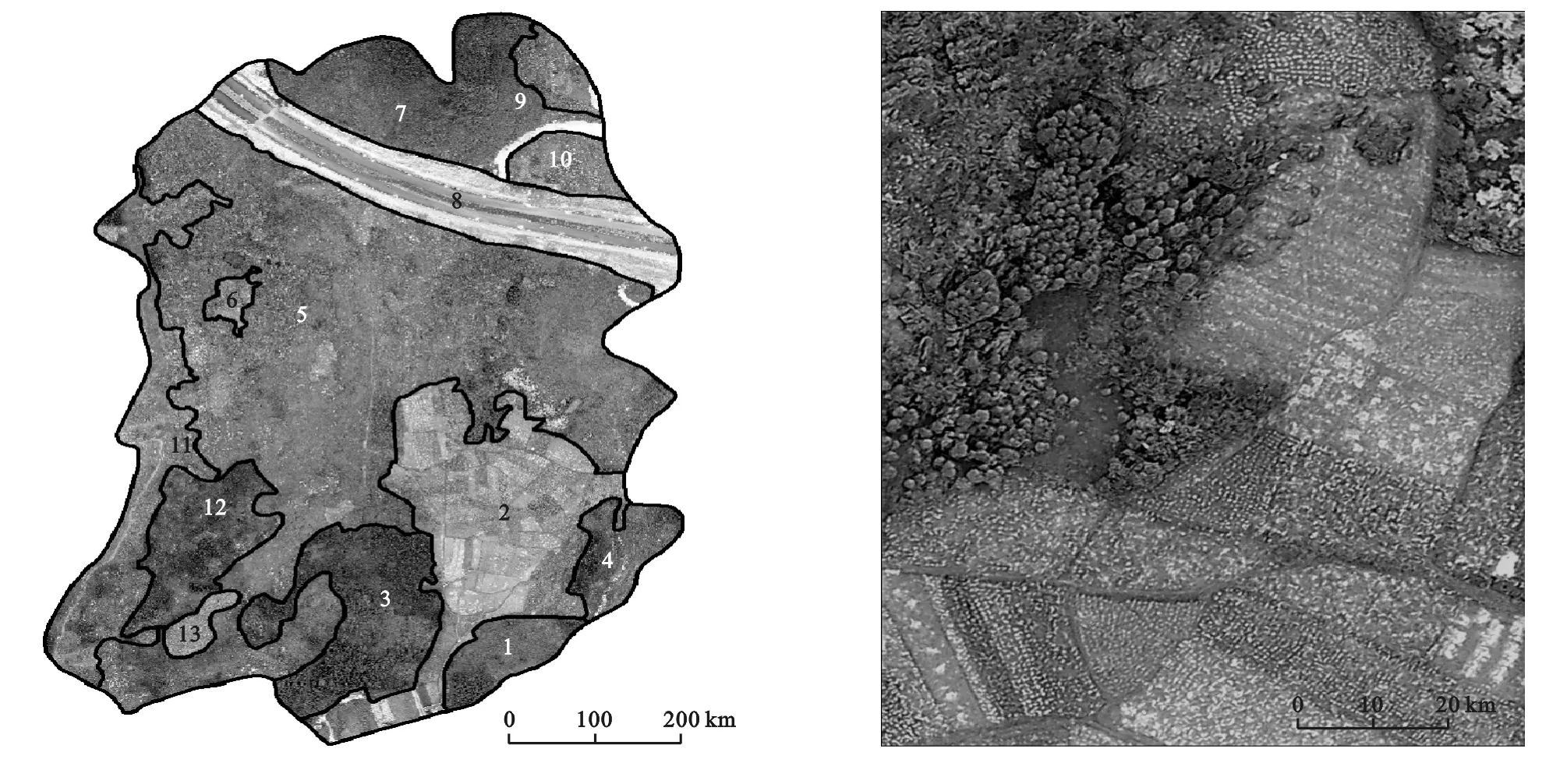
a 基于無(wú)人機(jī)影像的水蝕調(diào)查單元地塊勾繪示例 b 無(wú)人機(jī)影像放大后的細(xì)節(jié)圖
注:地塊編號(hào)1為灌木林地; 2為旱地; 3為其他林地; 5為其他草地; 8為交通運(yùn)輸用地; 13為水田。
圖2基于無(wú)人機(jī)航測(cè)的水蝕野外調(diào)查單元地塊勾繪示例與影像細(xì)部圖

表2 水蝕調(diào)查單元屬性
當(dāng)使用微型旋翼無(wú)人機(jī)進(jìn)行外業(yè)調(diào)查時(shí),外業(yè)調(diào)查工作的任務(wù)將得到簡(jiǎn)化,一種典型的工作流程是:外業(yè)調(diào)查人員將調(diào)查單元邊界導(dǎo)入地面站軟件,依次到達(dá)調(diào)查單元附近后,操作無(wú)人機(jī)對(duì)調(diào)查單元進(jìn)行航測(cè)和特征照片航拍,整理和保存好照片成果。余下的數(shù)據(jù)處理和信息提取工作由內(nèi)業(yè)人員完成。傳統(tǒng)調(diào)查與無(wú)人機(jī)調(diào)查流程對(duì)比如圖3所示。
3 無(wú)人機(jī)外業(yè)調(diào)查方法的優(yōu)勢(shì)
在無(wú)人機(jī)水蝕調(diào)查單元外業(yè)調(diào)查的方法中,不再需要制作調(diào)查底圖、內(nèi)業(yè)清繪和整理錄入等工作,簡(jiǎn)化了工作環(huán)節(jié),減少了出錯(cuò)概率,提高了工作效率。外業(yè)調(diào)查工作簡(jiǎn)化為航拍,剝離了外業(yè)調(diào)查中的現(xiàn)場(chǎng)勾繪與信息調(diào)查等繁重任務(wù),有效降低了外業(yè)工作量,降低了對(duì)外業(yè)調(diào)查人員的要求。此外,由于無(wú)人機(jī)活動(dòng)范圍廣,很大程度上避免了無(wú)公路可走,爬山或繞路的時(shí)間消耗,更大程度的節(jié)省了時(shí)間。在全國(guó)水土流失動(dòng)態(tài)監(jiān)測(cè)與公告項(xiàng)目實(shí)踐中,傳統(tǒng)方法一天只能調(diào)查2~3個(gè)調(diào)查單元,無(wú)人機(jī)調(diào)查方法一天可以調(diào)查4~10個(gè)調(diào)查單元。

圖3 傳統(tǒng)調(diào)查與無(wú)人機(jī)調(diào)查流程對(duì)比
除了效率提升之外,無(wú)人機(jī)外業(yè)調(diào)查的一項(xiàng)突出優(yōu)勢(shì)是數(shù)據(jù)質(zhì)量提升和可追溯。高空視角更容易觀察全局,相對(duì)于傳統(tǒng)現(xiàn)場(chǎng)勾繪的方法,以無(wú)人機(jī)航拍高分辨率影像為底圖的地塊劃分更加精準(zhǔn),解決了難以準(zhǔn)確勾繪地塊邊界的問(wèn)題。信息提取也更加準(zhǔn)確,并且影像數(shù)據(jù)可以隨時(shí)備查,及時(shí)修正。由此,在國(guó)家或省級(jí)層面,更多的內(nèi)業(yè)工作可以集中由專業(yè)機(jī)構(gòu)完成,更容易把控質(zhì)量。
在成本方面,以DJI Phantom3 Advance這款無(wú)人機(jī)為例,配備6塊電池和顯示設(shè)備后的全套價(jià)格不超過(guò)萬(wàn)元,在飛行操縱方面足夠簡(jiǎn)單,無(wú)需專業(yè)培訓(xùn),上手即會(huì),適合大范圍推廣應(yīng)用。
4 結(jié) 論
綜上所述,現(xiàn)有的微型旋翼無(wú)人機(jī)產(chǎn)品和攝影測(cè)量技術(shù)已經(jīng)可以滿足水土流失評(píng)價(jià)中水蝕外業(yè)調(diào)查工作的需求。與傳統(tǒng)外業(yè)調(diào)查方法相比,基于無(wú)人機(jī)的外業(yè)調(diào)查方法在以下各方面具有明顯優(yōu)勢(shì):
(1) 簡(jiǎn)化了工作流程,完全數(shù)字化的工作流程不再需要紙質(zhì)媒介的中間環(huán)節(jié),提高了效率。
(2) 減輕了外業(yè)工作量,外業(yè)非常耗時(shí)的地塊勾繪工作被剝離,在室內(nèi)基于無(wú)人機(jī)高分辨率影像可以輕松完成。
(3) 延伸了信息采集工具的可到達(dá)范圍,人不再需要費(fèi)時(shí)的到達(dá)調(diào)查單元區(qū)域內(nèi)。
(4) 保障了數(shù)據(jù)質(zhì)量,解決了現(xiàn)場(chǎng)難以準(zhǔn)確勾繪地塊邊界的問(wèn)題,調(diào)查的信息有影像可追溯,質(zhì)量可控。由此可見(jiàn),完善解決了傳統(tǒng)調(diào)查方法的兩大不利因素。
在全國(guó)第一次水利普查中,采用分層抽樣的方法,在全國(guó)范圍內(nèi)布設(shè)水蝕野外調(diào)查單元,開(kāi)展了大量細(xì)致的外業(yè)調(diào)查工作,然后利用調(diào)查單元內(nèi)的計(jì)算結(jié)果,通過(guò)空間插值,來(lái)評(píng)估區(qū)域內(nèi)的水蝕情況,可見(jiàn)外業(yè)調(diào)查工作對(duì)區(qū)域水蝕評(píng)估的重要性。當(dāng)時(shí)全部依靠人員實(shí)地地塊調(diào)查,工作難度很大。水利部后續(xù)每年開(kāi)展的全國(guó)水土保持動(dòng)態(tài)監(jiān)測(cè)與公告項(xiàng)目中,在全國(guó)水土流失重點(diǎn)防治區(qū)選取抽樣縣,對(duì)其野外調(diào)查單元每年度進(jìn)行更新調(diào)查,基于無(wú)人機(jī)的調(diào)查方法得到了應(yīng)用,體現(xiàn)了其優(yōu)勢(shì),而通過(guò)調(diào)查方式的改進(jìn)、成本的降低,將擴(kuò)展抽樣調(diào)查在水土流失評(píng)價(jià)中的應(yīng)用范圍,對(duì)于評(píng)價(jià)方法的進(jìn)步和評(píng)價(jià)結(jié)果準(zhǔn)確性的提升,具有促進(jìn)作用。
[1] 劉寶元,郭索彥,李智廣,等.中國(guó)水力侵蝕抽樣調(diào)查[J].中國(guó)水土保持,2013(10):26-34.
[2] 郭索彥,李智廣.我國(guó)水土保持監(jiān)測(cè)的發(fā)展歷程和成就[J].中國(guó)水土保持科學(xué),2009,7(5):19-24.
[3] 謝云,林燕,張巖.通用土壤流失方程的發(fā)展與應(yīng)用[J].地理科學(xué)進(jìn)展,2003,22(3):279-287.
[4] 李安福,曾政祥,吳曉明.淺析國(guó)內(nèi)傾斜攝影技術(shù)的發(fā)展[J].測(cè)繪與空間地理信息,2014,37(9):57-62.
[5] 曲林,馮洋,支玲美,等.基于無(wú)人機(jī)傾斜攝影數(shù)據(jù)的實(shí)景三維建模研究[J].測(cè)繪與空間地理信息,2015,38(3):38-43.
[6] 王卿,郭增長(zhǎng),李豪,等.多角度傾斜攝影系統(tǒng)三維量測(cè)方法研究[J].測(cè)繪工程,2014,23(3):10-14.
[7] 王宗輝.航空攝影測(cè)量技術(shù)的應(yīng)用研究[J].價(jià)值工程,2014(30):235-236.
[8] 李明慈.微型無(wú)人機(jī)攝影測(cè)量數(shù)據(jù)處理研究[D].北京:北京建筑大學(xué),2015.
[9] Harwin S, Lucieer A, Osborn J. The impact of the calibration method on the accuracy of point clouds derived using unmanned aerial vehicle multi-view stereopsis[J]. Remote Sensing, 2015,7(9):11933-11953.