空間3-DOF柔性并聯微動平臺運動學分析
2018-03-29 05:13:33徐洪業李楊民李祥春
制造業自動化 2018年3期
徐洪業,李楊民,李祥春
(1.天津理工大學 機械工程學院 天津市先進機電系統與智能控制重點實驗室,天津 300384;2. 香港理工大學 工程學院 工業與系統工程學系,香港 999077)
0 引言
Hunt[1]提出了3-RPS并聯機構,可實現兩個轉動和一個平動,直到現在都在被廣泛研究和應用。微操作機器人技術是由微定位技術與機器人技術結合而產生的,其相關技術還可以帶動機器人技術、精密加工、微電子、光纖對接、纖維醫學等技術的發展[2]。同時,并聯機構具有定位準確、剛度高和較高的承載能力遠超過了串聯機構[3]。相比較于傳統的鉸鏈,柔性鉸鏈屬于可逆的支撐結構,作為一種體積小無摩擦損失、無間隙運動平穩的高靈敏度傳動機構,具有體積小無摩擦損失、無間隙、無潤滑、易于加工制造、運動平穩和分辨率高等優點,已廣泛應用于航空工業、自動化工業、生物醫藥等領域[4]。由于壓電陶瓷具有響應快、輸入力大、分辨率高,無機械損耗、無污染、無磁場等優點,微動平臺通常選用壓電陶瓷作為驅動器。但由于壓電陶瓷的輸出范圍小,一般只有幾微米至幾十微米,所以需要微位移放大機構來實現對壓電陶瓷輸出位移的放大與傳遞。目前,通常采用的微位移放大機構主要有兩種:差式放大機構和橋式放大機構[5,6]。本文基于3-RPS并聯機構設計了一種柔性并聯微操作平臺,采用橋式微位移放大機構作為并聯微動平臺的移動副P。利用閉環矢量法和解析法對微動平臺進行運動學分析,并對微動平臺進行了運動逆解仿真。

圖1 微動平臺模型
1 微動平臺運動模型的建立
微動平臺的三維模型和原理圖如圖1所示,圖1(a)為微動平臺的三維模型,圖1(b)為原理圖。微動平臺三個支鏈為120°對稱分布,定平臺和動平臺分別為等邊三角形。坐標系的建立如圖1(b)所示,設定平臺的外接圓半徑為R,動平臺的外接圓的半徑為r;在定平臺上建立定坐標系O-xyz,x軸與A1A2平行,y軸的負方向過A3點;在動平臺上建立動坐標系O′-x′y′z′,x′軸與B1B2平行,y′軸的負方向過B3點。
則旋轉矩陣[7]為:
公式中:α,β,γ為繞定坐標系O-xyz的x,y,z軸旋轉的旋轉角度,s-sin,c-cos,由于微動平臺的位移很小,所以轉動角度也很小,所以sinα≈α,sinβ≈β,sinγ≈γ;cosα=cosβ=cosγ≈1 ,則公式(1)可化簡為:
1.1 運動學位置逆解
由圖1(b)可知,定平臺中,各基底Ai在定坐標系O-xyz中的坐標可表示為[xAi,yAi,zAi]T。
在動平臺中,各點Bi在動坐標系O′-x′y′z′中的坐標可表示為則:
在定坐標系O-xyz中,支鏈底端A1,A2,A3到對應各球面副的矢量為:
其中:p1,p2,p3為各球副到定平臺的距離,則各桿件的長度為pi/cos10°(i=1,2,3)。根據閉環矢量法[8,9],如圖2所示,R為旋轉矩陣,bi是動坐標系原點O′到各球面副的向量,C為定坐標系到動坐標系的向量,ai為定坐標系原點O至各轉動副的向量,Li為各支鏈的長度,ni為各支鏈的方向向量。則:
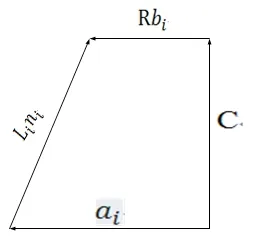
圖2 矢量關系圖
對支鏈1:
展開得:
對支鏈2:
展開得:
對支鏈3:

1.1 運動學位置逆解
由圖1(b)可知,定平臺中,各基底Ai在定坐標系O-xyz中的坐標可表示為[xAi,yAi,zAi]T。
在動平臺中,各點Bi在動坐標系O′-x′y′z′中的坐標可表示為則:
在定坐標系O-xyz中,支鏈底端A1,A2,A3到對應各球面副的矢量為:
其中:p1,p2,p3為各球副到定平臺的距離,則各桿件的長度為pi/cos10°(i=1,2,3)。根據閉環矢量法[8,9],如圖2所示,R為旋轉矩陣,bi是動坐標系原點O′到各球面副的向量,C為定坐標系到動坐標系的向量,ai為定坐標系原點O至各轉動副的向量,Li為各支鏈的長度,ni為各支鏈的方向向量。則:
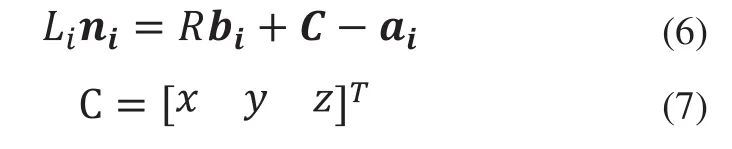
圖2 矢量關系圖
對支鏈1:
展開得:
對支鏈2:
展開得:
對支鏈3:

展開得:
在給出動平臺沿Z軸方向的行程z和繞x和y軸的轉動角度α和β后,結合上述方程可求出三個移動副的行程。此解即為運動學的逆解。
1.2 運動學正解推導
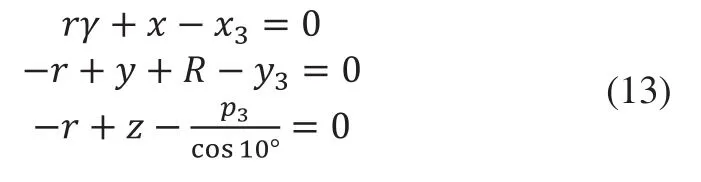
根據位置封閉的方法[10,11]求解。假設轉動副R的軸線u1,u2,u3與定坐標系Y軸的夾角分別為1=30°,2=330°,3=90°,Ai在定坐標系中的坐標為[xAi,yAi,zAi]T,各桿與定平臺的夾角分別為λi(i=1,2,3)。假設球鉸中心Bi與動平臺解除約束作用,則Bi繞其軸線ui以Ai為圓心,以伸長后的桿長Li'=Li+?Li為半徑旋轉。由解析幾何可推導出動平臺各球鉸中心Bi(i=1,2,3)在定坐標系中的表達式:
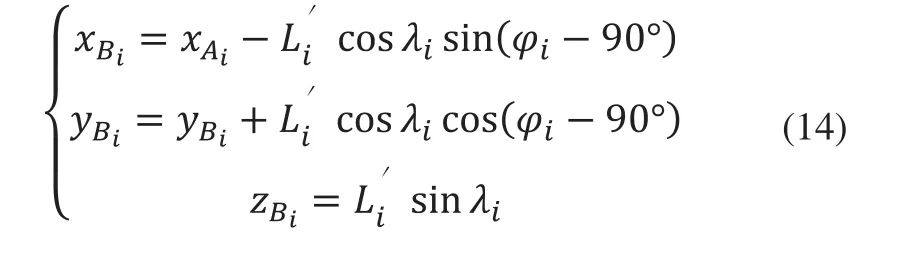
設動平臺的邊長為b,則:
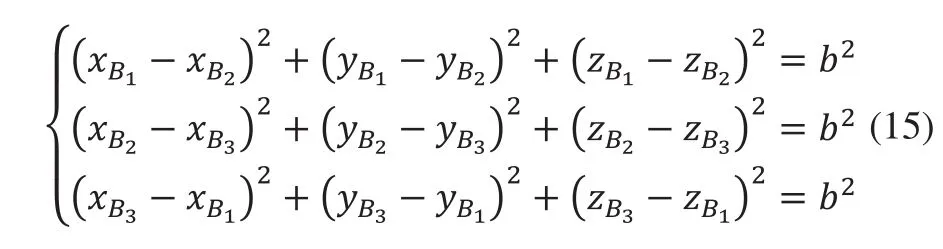
將式(14)帶入式(15)得:

Ai~Ei為并聯機構已知的幾何參數及輸入變量的代數式,通過化簡可求得λi(i=1,2,3),即可求得球鉸Bi在定坐標系的坐標。
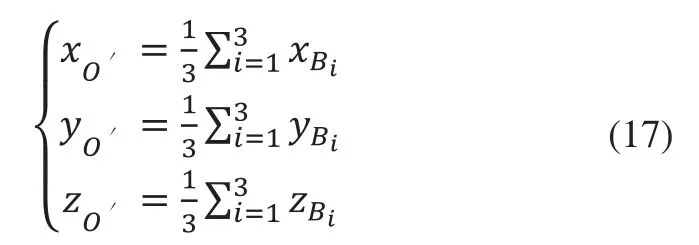
由三角形的形心定理動平臺O'在O-xyz中的坐標:
平移變換矩陣T(xB,yB,zB)可表示為:
則動平臺上各點Bi在定坐標系O-xyz中的其次表達式為:
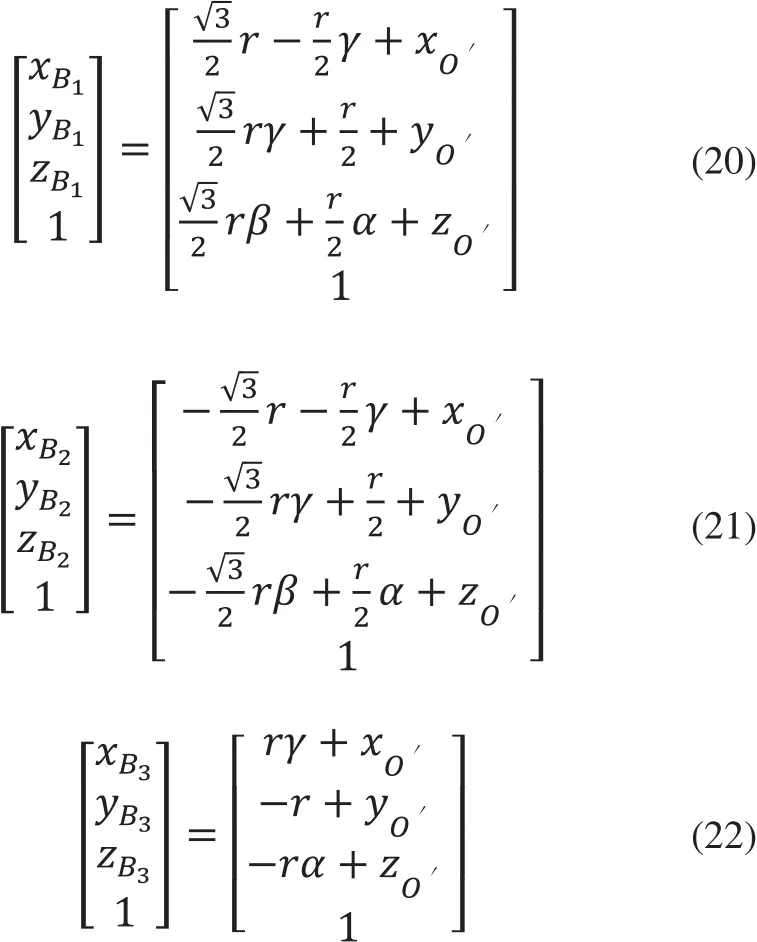
其中,xO',yO',zO'分別表示動坐標系O′-x′y′z′中心點O′在動坐標系中的位置矢量。
將式(17)代入式(20)~式(22)中,即可獲得相應動坐標系3個坐標軸方向的旋轉角α,β,γ。
2 雅可比矩陣
將式(6)對時間求導得:

將式(23)左乘式(24)得到:

根據混合向量積的運算法則化簡式(25):

式中:Jinv為3×3矩陣;
Jinv為3×3矩陣。
所以并聯矩陣的速度映射矩陣為:
式中:
3 運動學仿真
利用ADAMS軟件能夠建立和測試虛擬樣機,實現在計算機上仿真分析復雜機械系統的運動學和動力學性能[12,13]。將在SolidWorks中建好的三維模型導入ADAMS軟件中,對微動平臺進行運動學仿真,對運動學逆解進行求解。三個驅動桿上施加運動:?L1=4.6296×10-4×cos(0.04×pi×time),?L2=4.6296×10-4)×cos(0.04×pi×time+10),?L3=4.6296×10-4×cos(0.04×pi×time)-10時,位移隨時間的變化曲線如圖3所示。當三個驅動桿桿長成周期性變化時,輸出位移也成周期性變化,位移曲線充分說明了微動平臺只有Z向一個位移。
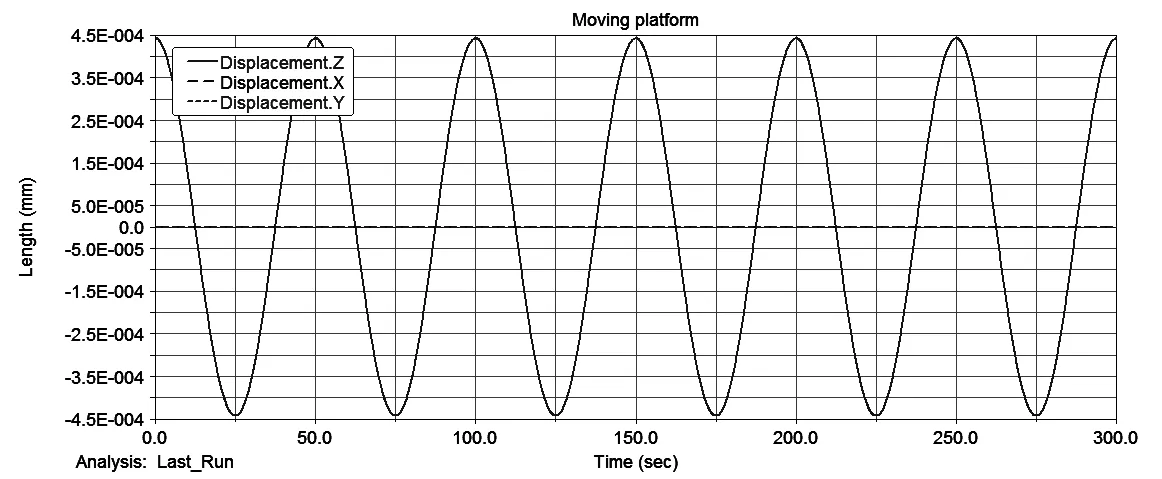
圖3 位移-時間變化曲線
當三個驅動桿桿長成周期性變化時,動平臺的線速度變化曲線和角速度變化曲線如圖4和圖5所示。當輸入為余弦函數時,動平臺輸出的線速度和角速度也成正/余弦函數規律變化,說明并聯微動平臺可應用于對速度變化規律要求高的場合。說明了該微動平臺的運動可靠性。
4 結論
本文設計了一種空間3-DOF柔性并聯微操作平臺,該微動平臺可實現繞X軸和Y軸的轉動以及沿Z軸方向的移動。應用閉環矢量法和解析法對并聯機構的運動正解和逆解進行了推導,并用ADAMS軟件對微動平臺進行了運動學逆解的仿真,說明了該平臺運動規律的可靠性。同時,也對該微動平臺動力學的研究打下了基礎。
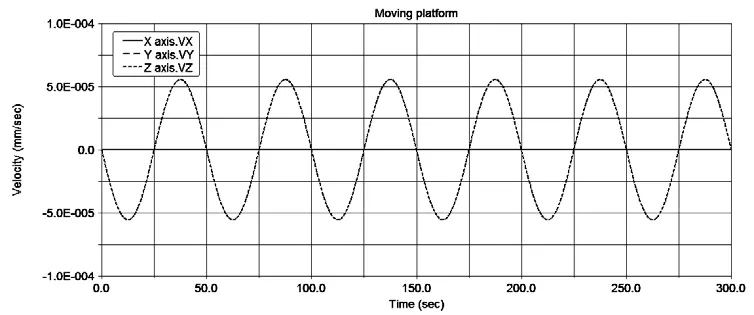
圖4 速度-時間變化曲線
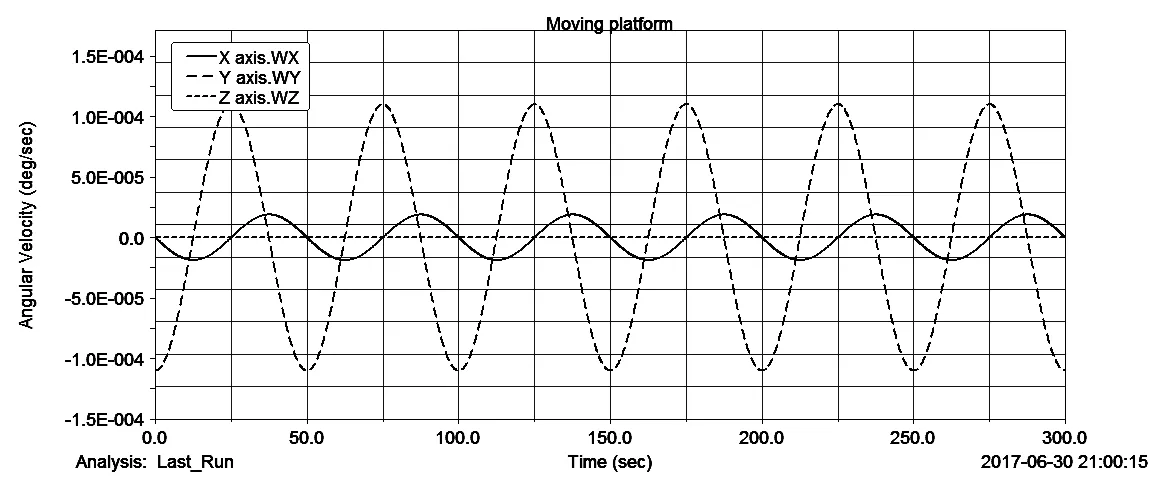
圖5 角速度-時間變化曲線
[1]K.H.Hunt,“Structural kinematics of in-parallel-actuated robot arms,”ASME Trans[J].Mech. Trans.Autom.Des.105(1983):705-712.
[2]李楊民,湯暉,徐青松,等.面向生物醫學應用的微操作機器人技術發展態勢[J].機械工程學報,2011,23(47):1-13.
[3]Yangmin Li, QingsongXu. Kinematic analysis of a 3-PRS parallel manipulator[J].Robotics and Computer-Integrated Manufacturing2007,23:395-408.
[4]張景柱,徐誠,趙彥峻.新型柔性鉸鏈的柔度計算[J].工程力學,2008,25(11):27-32.
[5]Tang Hui, Li Yangmin, Huang Jiming. Design and analysis of a dual-mode driven parallel XY micromanipulator for micro/nanomanipulations[J].Proceedings of the Institutionof Mechanical Engineers, Part C,Journal of Mechanical En-gineering Science,2012,226(12):3043-3057.
[6]于靖軍,畢樹生,宗光華.全柔性微位移放大機構的設計技術研究[J].航空學報,2004,25(1):74-78.
[7]Bin Li, Yangmin Li, Dynamics Analysis of a Novel Overconstrained Three-DOF Parallel Manipulator[J]Proceedings of International Conference on Mechatronics andAutomationTianjin,China 2014,August 3-6:818-833.
[8]謝哲東,賈雨璇,邵琦,等.一種微型3一PSP并聯機構的運動學、雅克比矩陣及運動奇異性分析[J].中國農機化學報,2016,37(11):116-121.
[9]邵珠峰,唐曉強,王立平,黃鵬.平面柔性3-RRR并聯機構自標定方法[J].機械工程學報,2009,45(3):150-155.
[10]梁崇高,榮輝.一種Stewart平臺型機械手位移正解[J].機械工程學報,1991,27(2):26-30.
[11]周寒英.空間3-DOF柔性微動操控平臺的設計和分析[D].湖南大學,2015:35-41.
[12]楊春光,趙世平,陸水龍,等.基于虛擬樣機技術的攀爬機分析[J].機械,2009, 36(2):73-75,78.
[13]王丹,楊蘭松,郭輝.3-RPS并聯機器人的運動學及動力學分析[J].機械設計與制造,2007,(3):120-122.