永磁吸附爪刺式爬壁機器人復合輪結構設計
2018-03-29 05:13:26魏軍英范召艦張萌萌
制造業自動化 2018年3期
魏軍英,范召艦,張萌萌,袁 苑,趙 坡
(山東科技大學 機械電子工程學院,青島 266590)
0 引言
永磁吸附式爬壁機器人安全性較高,具有吸附力穩定,無需額外消耗電能等優點,已廣泛應用于電廠、核工業、消防和造船行業中,主要功能用途為鋼鐵墻壁的清潔和噴涂、油罐厚度的檢測和探傷檢查等作業[1]。
目前對永磁吸附式爬壁機器人的研究主要集中在永磁輪本體結構設計[2]、吸附單元拓撲結構設計優化[3,4]和控制系統[5]等方面。永磁輪的性能對機器人在磁基墻壁上安全爬行起關鍵作用[6]。文獻[2]提出一種永磁體整體式分布的永磁輪,永磁體分別安裝在磁輪兩側,從而與磁基墻壁形成磁通回路。通過試驗表明,整體式永磁輪有效提高爬壁機器人吸附力,增加其運行可靠性。現有對永磁輪的研究多集中在提升吸附性能方面,而對其運行穩定性、受力平衡、壁面自適應等研究較少。傳統的磁輪和底板的剛性連接限制了機器人對曲面的適應性,而簡單的鉸鏈連接由于自由度過高使得機器人磁輪在重力作用下出現外/內翻現象。本文針對凹凸不平的磁基曲面,基于昆蟲柔性跗節鏈的結構特點設計了一種仿生柔性爪刺式復合輪結構,并改進現有永磁輪與底板連接方式,實現了永磁吸附式爬壁機器人的小型化、輕量化。
1 機器人主體結構設計
永磁吸附式爬壁機器人主體結構如圖1(a)所示。該機器人為接觸式吸附方式,采用4輪軸對稱式布局,前置驅動電機通過減速機帶動2個復合輪的中心旋轉軸轉動,通過控制前置驅動電機實現主體爬行及拐彎。前輪為復合輪,通過將仿生爪刺抓附方式與永磁吸附式機器人相結合,提高了吸附性能,同時實現吸附和行走兩種功能;后輪為萬向輪,主要起支撐作用。整體復合輪與底板的安裝方式如圖1(b)所示,復合輪以懸掛式與車體框架連接。其中復合輪與磁輪架通過滾動軸承連接,磁輪架與上懸掛板通過氣囊連接,并在兩側安裝一對鉸鏈連桿,使得復合輪能自適應調節,適應不同曲率半徑的鋼制壁面,提高吸附力和穩定性。
2 復合輪結構設計及分析
單個復合輪由永磁鐵、爪刺及隔片、軸承、軸承座、軛鐵等部分組成,如圖2所示。復合輪整體半徑約150mm,厚度85mm。每個復合輪中包括6組仿生柔性爪刺及隔片,相鄰爪刺足片之間通過隔片隔開,保證每個爪刺足片能夠獨立運動不產生干涉。同時將永磁體周向安裝在復合輪軸承座外表面,最后通過仿生柔性連接結構將爪刺足片與永磁體外輪轂連接,使得爪刺足片包裹著永磁體。該復合輪結構設計可有效防止磁輪打滑,并保護易碎的永磁體,同時將磁吸附傳遞到爪刺尖部,在磁吸力的作用下,提高爬行穩定性,降低其發生外/內翻現象。
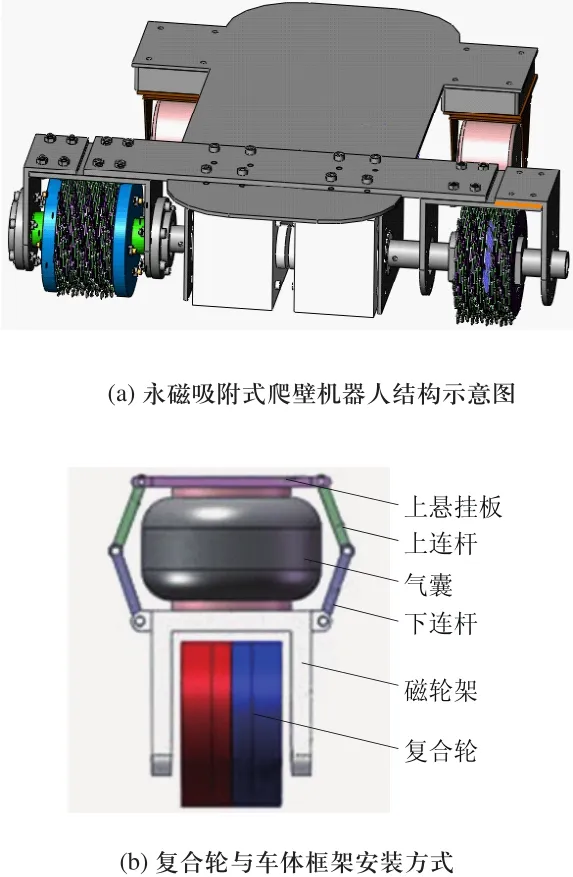
圖1 機器人主體結構圖
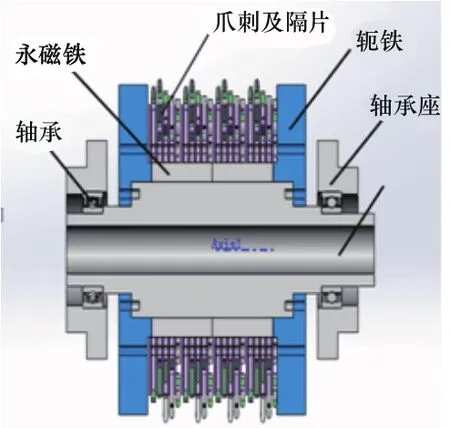
圖2 單個復合輪結構示意圖
2.1 仿生柔性爪刺足片的結構設計
在爪刺式爬壁機器人的設計中,柔性爪刺足片的結構是仿生柔性爪刺足設計的關鍵[7]。研究發現,大自然中很多生物均能在垂直壁面上進行攀爬[8],其中節肢類和爬行類昆蟲通過極細的足尖剛毛抓住物體的粗糙表皮,帶粘性的足尖剛毛能在粗糙表面產生足夠的勾附力與自身重力抵消,實現在垂直壁面上爬行[9]。如圖3(a)所示,通過對東方絹金龜的跗節鏈長度測量發現,其前四個跗分節(Tal-Ta4)長度基本一致,Ta5跗分節較長,如圖3(b)所示。
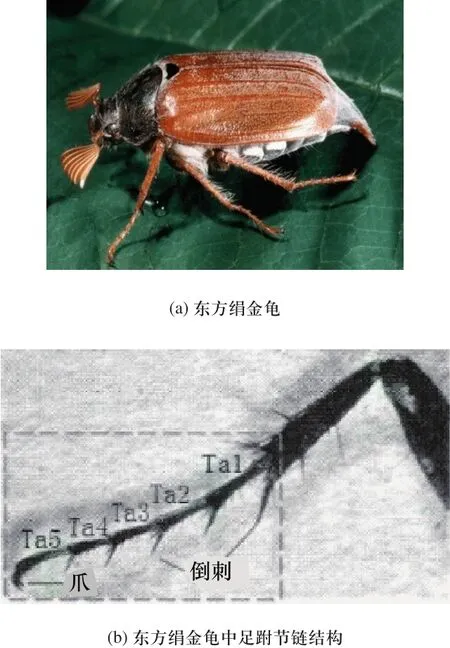
圖3 東方絹金龜結構圖
仿生柔性爪刺足片的結構包括仿生柔性連接結構、爪刺、足部基體等。其中柔性連接結構的作用與柔性跗節鏈對昆蟲足部的作用類似,其設計需要滿足以下兩個條件:
1)為了避免單個爪刺應力集中而造成損壞,應使載荷盡可能均勻地分布在多個爪刺上。
2)相鄰爪刺之間運動的獨立性。在抓附過程中,當其中一個爪刺抓附在壁面上時,若其他爪刺足片未找到可抓附表面形貌,爪刺便可以繼續沿壁面滑動,繼續尋找可抓附表面形貌。通過對東方絹金龜的柔性跗節鏈結構進行仿生設計,得到如圖4所示的仿生柔性爪刺足片,爪刺通過柔性連接結構與足部基體連接,柔性連接結構由三個S形單元組成,具有俯仰及伸縮自由度,能隨墻壁的粗糙程度自行調整起伏,保證每個爪刺足片均能承受勾附力。本文將仿生爪剌足片設計為硅鋼片一體結構,既考慮到永磁體通過硅鋼片導磁對吸附性能的影響,又使得加工工藝簡單,為永磁吸附式爬壁機器人實現小型化、輕量化提供了條件。
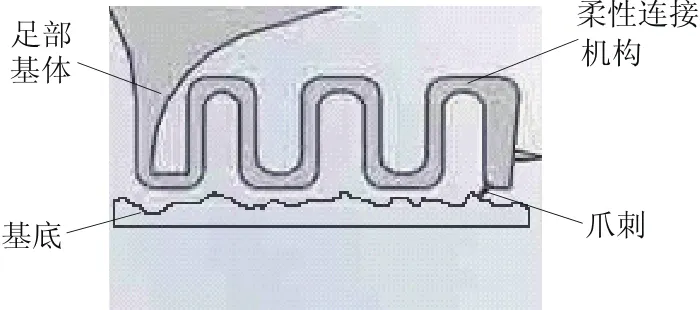
圖4 仿生柔性爪刺足片示意圖
2.2 仿生柔性爪刺設計
通過對昆蟲攀爬方式進行研究,仿生爪刺尖圓弧半徑對其抓附能力起關鍵作用,如果爪尖半徑遠小于壁面表面形貌半徑,爪刺尖能夠產生較大的扒附力;如果爪刺尖半徑比壁面表面形貌半徑大或大小相當,爪刺尖將很難與壁面形成機械鎖合。現對爪刺勾附壁面角度進行分析,假定一粗糙壁面,對爪刺滑過表面的過程進行剖面分析。
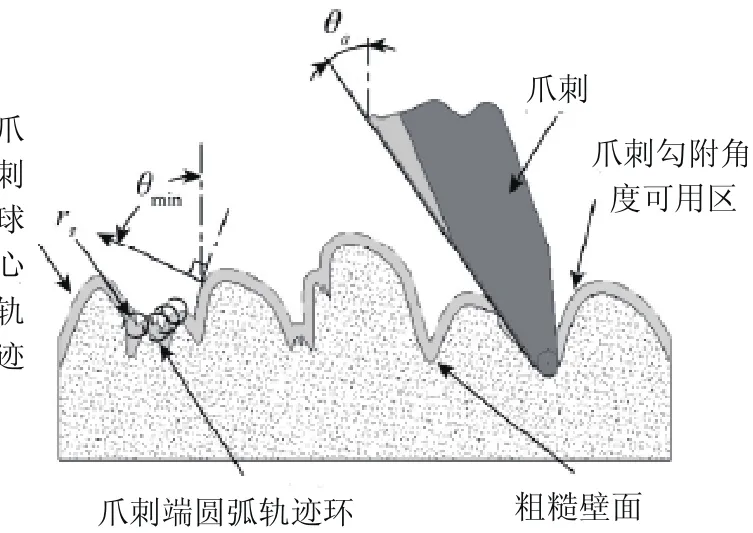
圖5 爪刺勾附粗糙磁基壁面模型剖視圖
如圖5所示,由于在爪刺在壁面表面上滑動時,爪刺尖端并不能一直沿表面形貌運動,可通過圓弧中心的軌跡路徑來簡化描述壁面的表面形貌。當爪刺接觸粗糙壁面時,定義θ為軌跡路徑法向與壁面法向夾角。若θ大于最小可用角θmin,爪刺會沿墻壁下滑至爪刺能勾附到可用表面形貌時停止,此時爪刺引線與水平面所成的角度為θa,可提供力進行攀爬。爪刺的勾附力與爪刺的切入角θa、最小可用角度θmin、以及摩擦系數μ有關:

由式(1)得出,當壁面凹凸不平時,爪刺抓附性能一部分由爪刺切入角和壁面的摩擦系數μ決定,另一部分由壁面材料強度大小決定。
2.3 仿生柔性爪刺足片分析
由于本文仿生爪刺足片采用硅鋼片一體化結構,爪刺與壁面接觸過程中,柔性連接結構的變形較小,可通過三階剛度矩陣K來描述柔性爪刺足片在(x,y)平面內的線性剛度與轉動剛度,剛度矩陣如式(2)所示:
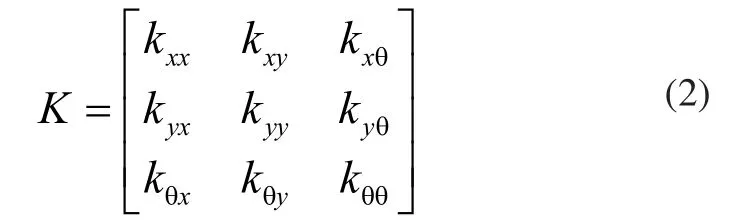
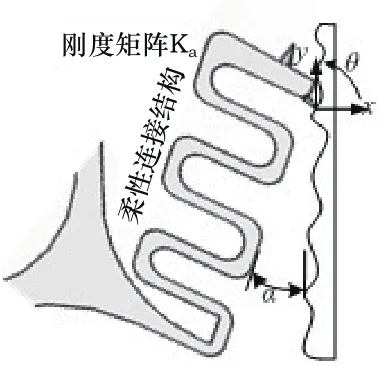
圖6 柔性連接結構與壁面夾角為α,剛度矩陣為Kα
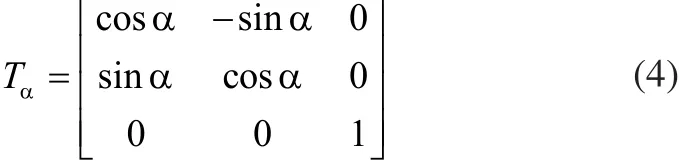
將爪刺與壁面間的接觸簡化為轉動約束,以爪刺與壁面接觸點作為剛度矩陣的坐標原點,其中x軸垂直于壁面,y軸平行于壁面,θ逆時針為正方向,建立剛度矩陣坐標系,如圖6所示。當柔性連接結構平行壁面(α=0)時,令柔性爪剌足片的剛度矩陣為K;當柔性連接結構與壁面夾角為α時,其剛度矩陣為Kα,有:

其中變換矩陣Tα如式(4)所示:
為進一步提高爪刺在壁面上的抓附性,描述柔性爪刺足片的剛度矩陣K需滿足以下條件[10]:
1)在預壓過程中,kxx在負x軸方向應足夠小以便爪刺能與磁基壁面接觸,且受到的壓附反力較小;在脫附階段,kxx在正x軸方向足夠大以便爪刺能夠迅速脫附而不會卡在裂縫中。
2)需保持kyy大小適中。若kyy值過小,在爪刺足沿壁面滑動以抓附凹凸槽時,柔性連接結構變形較大使更多的爪刺抓附在壁面上,不易脫附;若kyy值過大,柔性連接結構可能不足以支撐機器人重力,容易使其發生機械破壞。
3)需保持kxy盡量小,最好為負值。這樣爪刺在y軸方向發生變形時,不會在負x軸方向變形而導致爪刺過早脫附。
4)需保持kxθ與kyθ盡量小,可以為負值。保證柔性連接機構在抓附階段,不會因為在(x,y)平面內變形而導致爪刺脫附。
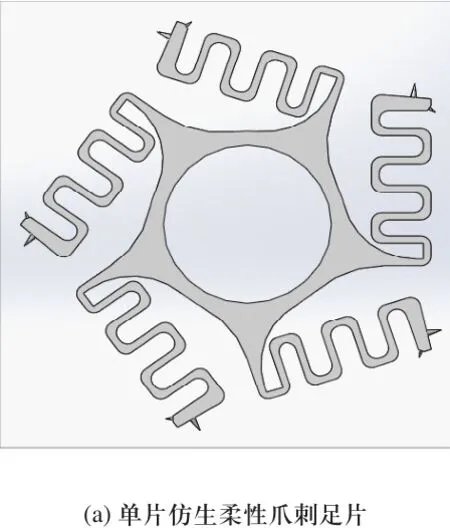
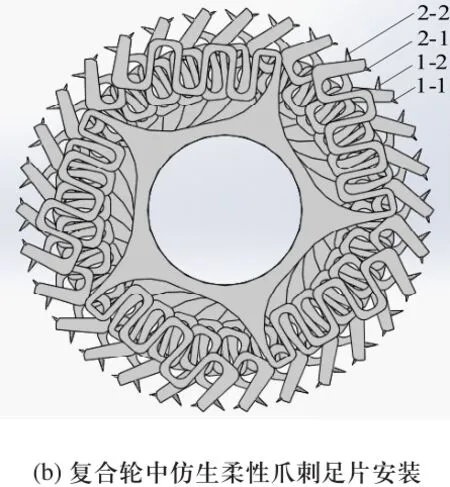
圖7 仿生柔性爪刺足片安裝
考慮到柔性連接結構剛度難于通過試驗測量,本文利用有限元方法分析對其剛度矩陣進行數值計算,以驗證柔性連接結構設計的合理性。在有限元分析中,分別在足片基體上施加固定載荷,在爪刺尖端施加位移載荷δ(Δux,Δvy,Δwθ)′,計算得到爪刺尖端受力情況F(Fxx,Fyy,Mθθ)′,其中(Δux,Δvy,Δwθ)′和(Fx,Fy,Mθ)′分別是爪刺尖端在(x,y,θ)方向上的位移與力。分別令δ1=(-0.5mm,0mm,0°)′,δ2=(0mm,0.2mm,0°)′,δ3=(0mm,0mm,2°)′進行有限元分析,得到對應的F1,F2,F3,由式(5)得到柔性爪刺足片的剛度矩陣K,最終得到夾角為α時的柔性爪刺足片剛度矩陣Kα。仿生柔性爪刺足片剛度分析結果如表1所示,可以得出在任一夾角下,計算結果能較好滿足對其剛度要求,從而驗證了仿生柔性連接結構設計的有效性和可靠性。

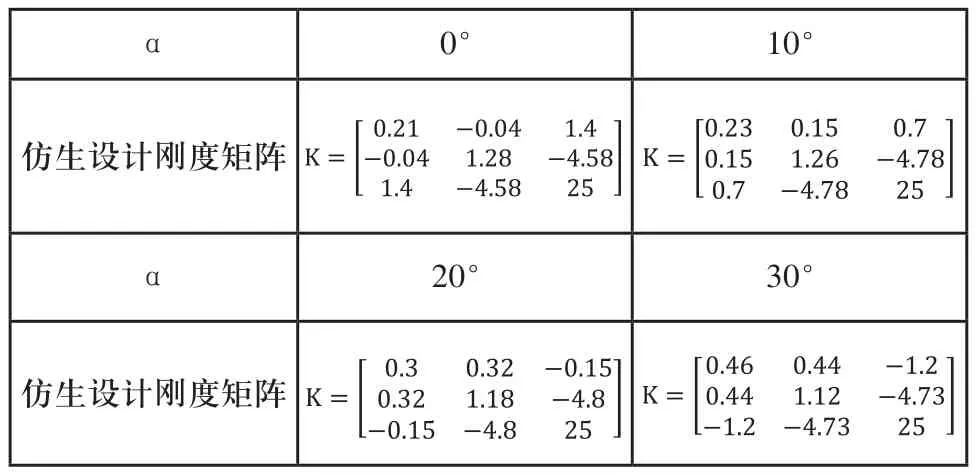
表1 仿生柔性爪刺足片剛度分析結果
3 試驗結果
本試驗以上述參數搭建試驗樣機如圖8所示,通過試驗,驗證了該永磁吸附式爬壁機器人復合輪設計的可靠性。在試驗中,該機器人能夠帶載攀爬磁基墻壁,載荷重量最高為600N。試驗過程為從1m垂直爬行至3m,再折返至1m。通過試驗效果可以看出,結合仿生爪刺足與永磁吸附的爬壁機器人,具有良好的攀爬效果,達到了預期效果。

圖8 永磁吸附式爬壁機器人樣機試驗
4 結論
通過仿真模型設計分析,及原理樣機進行的試驗,可得到如下結論:
1)通過對東方銷金龜足部柔性附節鏈的觀察研究,本文基于仿生原理設計一種仿生柔性爪刺足片結構。利用有限元方法對仿生結構進行分析,驗證了爪刺足片中仿生柔性連接結構的合理性與有效性。
2)進行永磁吸附式爬壁機器人樣機試驗,試驗表明復合輪結構設計能夠滿足帶載試驗要求,具有良好的攀爬效果,為爬壁機器人總體結構優化設計提供依據。
[1]戴振東,STANISLAV Gorb.蝗蟲腳掌微結構及其接觸的有限元分析[J].上海交通大學學報,2003,37(1):66-69.
[2]JinHo Kim. Design and Experimental Implementation of Easily Detachable Permanent Magnet Reluctance Wheel for Wall-Climbing Mobile Robot[J].Journal of Magnetics,2010,15(15):1-1.
[3]潘柏松.基于Halbach陣列爬壁機器人永磁輪吸附單元的設計與優化[J].浙江工業大學學報,2015,43(4):393-397.
[4]沈青青,張晉,李根.基于Halbach陣列爬壁機器人磁吸附單元的優化設計[J].輕工機械,2014,32(5):17-21.
[5]張強強.可變磁力復合輪式爬壁機器人的研究[D].太原理工大學,2013.
[6]丁問司.永磁吸附履帶式船舶爬壁機器人結構設計[J].機床與液壓,2016,44(6).
[7]劉彥偉.爪刺式爬壁機器人仿生機理與系統研究[D].中國科學技術大學,2015.
[8]陳東良,張群,王立權,左勇勝.一種粗糙壁面爬行機器人的設計與實現[J].哈爾濱工程大學學報,2012,33(2):209-213.
[9]管興偉,張昊,吉愛紅,戴振東.爬壁機器人尖爪型仿生腳掌設計[J].機電工程,2009,26(2):1-3.
[10]馬培蓀,陳佳品.油罐容積檢測用爬壁機器人的研制[J].上海交通大學學報,1996,30(11):159-164.
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年13期)2021-07-28 07:15:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
專用汽車(2016年5期)2016-03-01 04:14:49
中國房地產業(2016年2期)2016-03-01 01:25:23