自走式西瓜盆栽土壤信息采集裝置設計與試驗
2018-03-28 10:06:55劉浩蓬衛佳劉金吳太暉宮雪徐勝勇
農業現代化研究 2018年2期
劉浩蓬,衛佳,劉金,吳太暉,宮雪,徐勝勇
(華中農業大學工學院,農業部長江中下游農業裝備重點實驗室,湖北 武漢 430070)
近年來,我國農作物的生產水平有了突飛猛進的發展[1]。作物育種和作物生長過程的管理水平也相應地不斷提高。在反季節蔬果種植中通常采用的是溫室栽培技術,為了提高作物的質量和產量,需要對溫室栽培作物的生長信息進行全程化檢測和管理。在溫室西瓜培育過程中需要對樣本植株個體的生理指標以及生長環境相關參數進行精準采集[2-3]。通常情況下存在樣本數量大,數據采集的周期長、頻次高等問題[4-6]。傳統的人工操作方式容易出錯,勞動強度大,已經無法滿足當前作業要求。因此,亟需一種取代人工采樣的機械化、自動化和信息化等程度高的信息采集裝置,以降低人工勞動強度和生產成本,提高西瓜育種的產量、質量和效益。
現有國內的作物信息采集裝置大多只能獲取溫室內的環境信息,根據環境信息變化和作物生長階段所需進行灌溉[7],而土壤屬性包含的含水率和土壤養分等快速測量與控制對作物的生長和產量預測等具有重要意義,實現對土壤屬性的精確檢測需要對檢測人員進行專業的培訓,無法實現在線檢測[8];而對于大面積的農田土壤墑情信息的采集,可以采用GPS定位并結合GSM短信信息傳輸數據,實現對大面積農田的區域性信息測量,由于此類裝置體積較大,采用固定點采集,多點布置裝置整體成本較高,維護困難,不適合在溫室盆栽培育中推廣使用[9-12];設計一種能精準定位盆栽并將土壤信息監測傳感器伸入土壤中監測土壤信息的裝置是解決溫室盆栽土壤信息快速監測的有效途徑。因此,本文設計一種盆栽土壤信息采集裝置(以下簡稱采集裝置),首先設計采集裝置的整機結構,其次設計多關節機械臂、傳感器檢測裝置等關鍵部件,同時構建該裝置的控制系統和通信系統,最后進行盆栽土壤濕度采集試驗,分析采集裝置定位誤差及產生原因。該裝置采用基于STM32微控制器的多關節機械臂,模擬人工檢測方式將傳感器伸入西瓜盆栽土壤中,將傳感器搭載于電動自走式移動平臺上,移動平臺在電機驅動下能沿鋪設的軌道運動到指定盆栽位置,根據超聲波傳感器檢測盆栽位置,實現對盆栽土壤濕度數據的采集。測得數據可通過SIM900A GPRS模塊上傳到云服務器端,實現網頁端或移動終端對采集數據的實時監控。
1 整機結構與工作原理
1.1 整機結構
采集裝置為電動自走式作業機械,裝置的整體結構如圖1所示,主要由履帶底盤、多關節機械臂、傳感器檢測裝置、電氣控制盒、霍爾傳感器、超聲波測距模塊和減速電機等組成[13-16]。
動力裝置采用固定在履帶底盤兩側后下方的兩個直流減速電機,電機與履帶驅動輪采用聯軸器連接;4個霍爾傳感器安裝在履帶底盤車頭正下方,并保持在一條直線上,與履帶底盤車頭平齊;多關節機械臂的旋轉臺固定在履帶底盤上表面,由舵機控制旋轉臺在水平面旋轉,角度范圍為270°;超聲波測距模塊固定在履帶底盤的兩側,與旋轉臺平面中心線平齊;多關節機械臂由4節機械臂組成,機械臂之間采用舵機連接,構成6自由度多關節機械臂;傳感器檢測裝置由夾持裝置、舵機、舵臂、限位開關和傳感器組成,夾持裝置與多關節機械臂的末端固連在一起,舵機固定在夾持裝置外側中間,夾持裝置中心線位置設計了一個固定滑槽,舵臂安裝在舵機和固定滑槽之間,限位開關和傳感器連接在一起;傳感器安裝在夾持裝置中。裝置的主要技術參數見表1。

圖1 采集裝置結構示意圖Fig. 1 Structure diagram of acquisition device
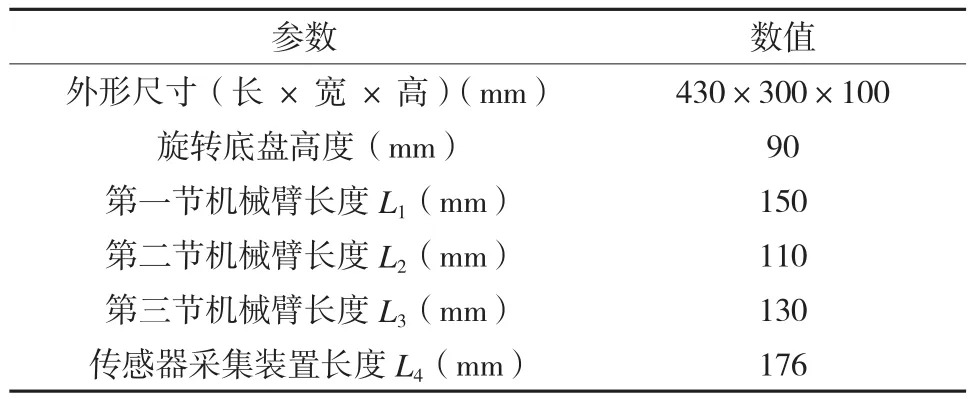
表1 采集裝置主要技術參數Table 1 Main technical parameters of acquisition device
1.2 工作原理
采集裝置的工作環境是外形呈長方形的溫室西瓜大棚,每條壟由7×2個盆栽組成,盆栽之間的間距為40 mm,軌道寬度為80 mm,盆栽中種植西瓜植株,瓜蔓引向上方。采集裝置在溫室中的運行軌道鋪設見圖2。
采集裝置在進行采集時,裝置沿軌道向前行駛,通過安裝在車頭的4個霍爾傳感器判斷前進路線,同時檢測制動標志線;當檢測到制動標志線時,裝置停止。車身兩側的超聲波測距模塊分別檢測車身到盆栽的精確距離,STM32單片機控制多關節機械臂將傳感器檢測裝置定位到盆栽土壤表面,夾持裝置上的舵機通過舵臂帶動傳感器豎直插入盆栽的土壤中,等待數據穩定后,STM32單片機讀取傳感器數據并保存到SD卡中,同時通過SIM900A GPRS模塊將實時數據傳輸到云服務器。多關節機械臂根據制動標志線依次采集車身左右盆栽的土壤信息,完成土壤信息采集后,采集裝置啟動并沿著軌道繼續行駛,重復上述過程,直到采集完所有盆栽。
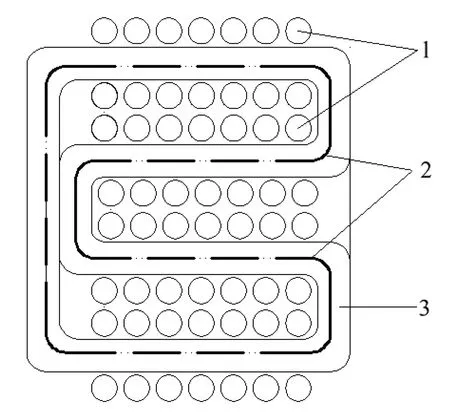
圖2 采集裝置運行軌跡示意圖Fig. 2 Schematic diagram of moving trajectory of acquisition device
2 采集裝置控制和通信系統設計
2.1 采集裝置的控制系統設計
如圖3所示,采集裝置控制系統包括STM32控制器、土壤濕度傳感器、霍爾傳感器、超聲波測距模塊、SD卡存儲單元、SIM900A GPRS模塊、驅動電路、直流減速電機、多關節機械臂、傳感器夾持裝置和電源電路,完成裝置的運動控制、數據采集、數據存儲和無線傳輸[17-19]。

圖3 采集裝置控制系統框圖Fig. 3 Block diagram of acquisition device control system
2.2 采集裝置的通信系統設計與實現
為實現盆栽土壤信息的遠程監控,通過SIM900A GPRS模塊實現無線網絡與 Internet 的連接,將數據上傳到云服務器端,并存儲在云數據庫中,再通過監控平臺實時顯示。
2.2.1 通信單元設計 SIM900A GPRS模塊是一款高性能工業級GSM/GPRS模塊,內嵌TCP/IP協議,能夠在EGSM/ 900 MHz頻段下工作,發射功率為2 W,-40~85 ℃的溫度環境下可正常運行[20-21]。采用聯通SIM卡與SIM900A GPRS模塊相結合,以STM32驅動SIM900A GPRS模塊,通過TCP/IP協議與Internet連接,將裝置采集的土壤濕度信息以GPRS流量的形式發送至云服務器。
2.2.2 網頁端監控系統設計 監控系統由云服務器、云數據庫和基于網頁的監控平臺組成。租用阿里云云服務器和云數據庫,采用Java語言建立基于Linux平臺的端口監聽程序,能夠實時獲取SIM900A GPRS模塊傳輸的數據,并將數據寫入云數據庫。進一步設計出基于網頁的監控平臺,為了提高監控系統的響應速度與交互性,采用了基于異步Java Script和Ajax技術的Web數據交互方式。進一步開發出基于安卓系統的手機客戶端。用戶通過該監控系統實時獲取西瓜盆栽的土壤信息,并保存數據,便于后期對數據進行分析處理。
3 關鍵部件設計與計算
3.1 傳感器檢測裝置設計與計算
如圖1和圖4所示,傳感器檢測裝置采用曲柄滑塊機構,活動鉸鏈m0為舵機,連桿La為舵臂,傳感器固定在連桿Lb上,c為傳感器檢測裝置的固定滑槽,并且與多關節機械臂的末端相連,舵機m0轉動時帶動舵臂La繞鉸鏈旋轉,帶動傳感器沿固定滑槽c上下運動。限位開關安裝在傳感器檢測裝置的末端,用來檢測傳感器是否成功定位到盆栽土壤表面。

圖4 檢測裝置機構運動簡圖Fig. 4 Kinematic diagram of detecting device
對傳感器檢測裝置進行受力分析可知,傳感器插入土壤過程中受到垂直向上的阻力Fb和連桿La沿垂直方向的分力Fay,當傳感器運動到下極限位置(La與水平夾角為45°)時,舵機需要提供的扭矩達到最大,設為Ta[22]。扭矩Ta計算方法為:

采用SMTS-II-100型號土壤濕度傳感器(精度為3%)對西瓜盆栽土壤(培養基質)濕度進行采集,將傳感器固定在萬能材料試驗機上,在不同濕度條件下,測試不同傳感器插入深度對應的土壤阻力,具體測試數據見圖5。隨著傳感器插入深度的增加,土壤阻力逐漸增大,傳感器插入深度和土壤阻力呈正相關關系。在傳感器插入土壤的最大深度為100 mm的情況下,對盆栽中不同位置測試10次取平均值,3種濕度下最大阻力為4.6 N,通過計算可知,需要舵機提供的最大力矩為46 N·cm。考慮檢測裝置殼體間相對滑動受到的摩擦阻力等因素,綜合分析檢測裝置的性能和成本,采用型號PDI-4409MG、額定力矩為98 N·cm的舵機,作為檢測裝置的動力元件。

圖5 土壤阻力與作業深度的關系Fig. 5 Relationship between soil resistance and job depth
3.2 多關節機械臂的機構設計與運動學分析
機械臂機構簡圖如圖6所示,該機構由一個270°旋轉底盤和4個舵機連接的多關節機械臂組成。移動平臺底盤加旋轉底盤的高度為L0,三節機械臂長分別為L1、L2和L3,傳感器檢測裝置長度L4;各個部分與x軸正方向夾角分別為θ1、θ2、θ3和θ4,盆高度為H,兩臂之間用舵機連接,通過控制各個舵機轉動角度使機械臂搭載傳感器運動到指定位置。為使傳感器能精準插入土壤,第四節機械臂應當在工作時與地面垂直,即θ4為90°。

圖6 機械臂機構簡圖Fig. 6 Diagram of mechanical arm
經過推導,得出機械臂運動過程中每個舵機的轉角表達式為:

式中:k為第一個舵機轉動角度與機械臂目標距離的比例系數,Lx為盆栽和旋轉底盤中心的距離,Lmin為機械臂最短伸長距離。
3.3 機械臂工作幅寬和采集裝置定位誤差分析
3.3.1 機械臂工作幅寬 由于盆栽土壤信息采集裝置的車體寬度為300 mm,為避免機械臂運動過程中碰到車身,選擇合理的機械臂工作近端極限距離為La=170 mm。在機械臂工作時,傳感器檢測裝置應當與地面保持垂直,當三節機械臂在一條直線上,并且傳感器檢測裝置末端剛好定位到盆栽土壤上方時,機械臂達到遠端極限位置,此時滿足:

式中:Lmax為機械臂最長伸長距離,H為盆的高度,取H=200 mm,由公式(3)~公式(8)可計算得Lmax≈ 342 mm。因此,可以確定采集裝置的機械臂工作幅寬為170~342 mm。
3.3.2 采集裝置定位誤差分析 根據實際土壤濕度采集作業方式,將傳感器檢測位置設定在距離盆栽邊緣50 mm處。采集裝置根據超聲波模塊對盆栽進行定位,只能定位到盆的邊沿,因此傳感器插入盆栽位置的理論值應該比盆栽到旋轉底盤中心的距離Lx增加50 mm。在機械臂工作幅寬范圍內設置采集裝置與盆栽等間隔距離的10組試驗,測量采集裝置實際插入盆栽位置,每組進行10次測試,取平均值并保留到整數位,得出采集裝置插入盆栽位置的理論值與實際值結果見表2。
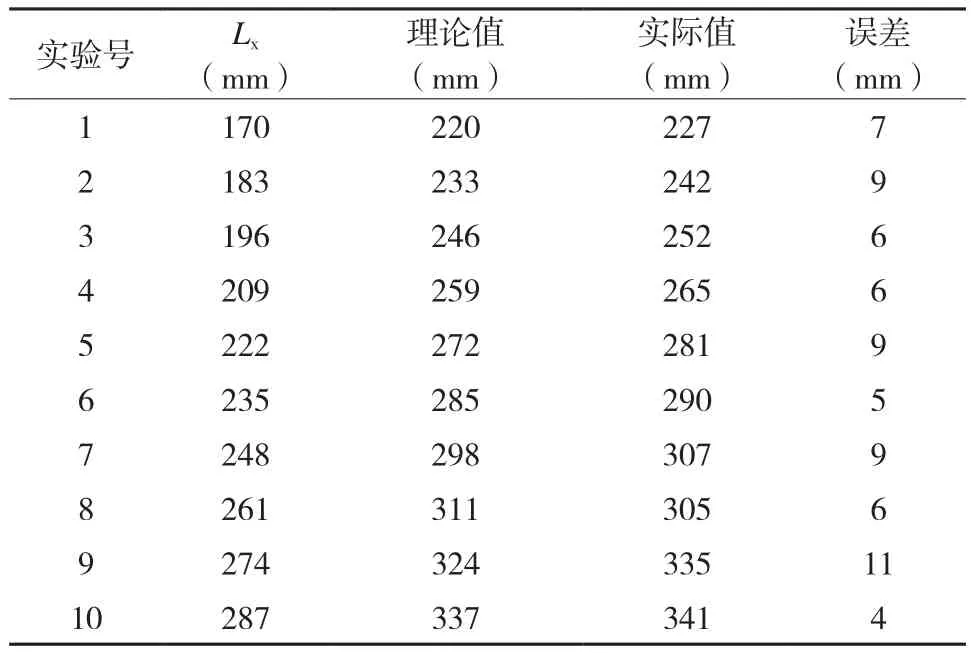
表2 機械臂定位誤差實驗結果Table 2 Experimental results of mechanical arm’s positioning error
由表2可知,采集裝置定位理論值和實際值之間誤差的平均值為7.2 mm,最大誤差為11 mm。測量定位范圍距盆栽邊沿50 mm內均可滿足測量要求,由此可知采集裝置的最大定位誤差為11 mm,在測量允許范圍內,能夠完成預期功能。分析結果表明,采集裝置定位誤差主要由超聲波測量誤差和機械臂運動產生的誤差組成,可以通過換用精度更高的測距裝置(如激光測距儀)來減小誤差。
4 盆栽土壤濕度采集試驗
進行盆栽土壤濕度采集試驗的目的主要是檢驗裝置是否能夠順利完成西瓜盆栽土壤信息采集工作,以及裝置各個部件的功能是否符合設計要求,并對裝置的可靠性進行評估。試驗裝置見圖7。

圖7 采集裝置試驗圖Fig. 7 Diagram of acquisition device testing
4.1 試驗條件與方法
2016年12月在湖北省武漢市華中農業大學機電工程訓練中心室內對120株西瓜盆栽進行土壤濕度采集試驗。試驗中采用SMTS-II-100型號土壤濕度傳感器采集土壤濕度信息。采集裝置的運行軌跡見圖2,裝置行走軌道寬度800 mm,盆栽間隔200 mm,盆的形狀為高度200 mm、直徑300 mm的圓柱體。
試驗過程為:啟動采集裝置對120株盆栽按預定軌道進行循環輪檢,重復10次實驗,記錄完成檢測所需時間,裝置脫軌次數、盆栽漏檢次數、測量行駛速度等,并對結果求平均值。再從120株盆栽中選取前20株,使用人工方式進行土壤濕度采集,并與裝置采集的數據進行對比。
試驗的評價指標有:裝置采集土壤濕度信息的準確度、檢測過程中的漏檢率、裝置行走的正確率、裝置的工作效率[23]。其中,漏檢率為未檢測到的盆栽占總盆栽數的百分比。
4.2 試驗結果與分析
在滿足測試需求情況下,裝置最大行走速度設置為0.24 m/s,行走的正確率為100%,達到自動化設計需求。在盆栽樣本采集實驗中,平均工作效率為3.2 盆/min,漏檢率為0.92%。對于實驗中出現的漏檢問題,主要有兩個原因,一是裝置在行走過程中速度過快或傳感器劇烈震動,會影響超聲波傳感器測量的數據,導致誤判;二是由于盆缽表面曲率較大會降低傳感器檢測精度。針對裝置漏檢問題,可通過增加超聲波傳感器數量、換用受震動影響小的激光測距裝置和增加盆缽側面平面度來提高傳感器檢測準確度,從而避免漏檢。若要提高采集速率,可以采取以下兩種方法,一是改進裝置整機結構,采用輪式的運動方式替代履帶式,從而提高運動速度;二是在設計成本允許的情況下采用效率更高的機械臂。
在人工采集時,為了保持數據的一致性,將傳感器與盆栽邊緣的水平距離調整為50 mm。人工采集與裝置采集結果對比。通過分析可知對于同一盆植株,裝置自動采集與人工采集的結果誤差不超過3.1%(圖8),即該裝置測量的數據與人工測量的數據重合度很高。該誤差的產生主要是受傳感器自身精度的影響。因此,替代人工采集而采用自動采集方式對盆栽土壤信息進行檢測能夠滿足采集要求。
5 結論
針對現有溫室西瓜盆栽土壤信息采集過程中存在的自動化程度低、人工采集工作強度大等問題,設計了一種電動自走式溫室盆栽土壤信息采集裝置,并通過實驗驗證了該裝置穩定性較高。建立了多關節機械臂的運動學模型,實現對盆栽的準確定位,其采集裝置定位誤差的最大值為11 mm;針對采集裝置定位誤差問題,可通過進一步提高機械臂的加工精度來減小誤差。設計巧妙的傳感器檢測裝置,使傳感器能根據不同采集對象靈活更換;針對裝置漏檢問題,可通過改用受振動影響小的激光測距裝置,或增加盆缽側面平面度來提高超聲波傳感器檢測的準確度。
采集裝置可通過作業需求更換除濕度以外的其他合適傳感器,并采用循環輪檢方式能很好地檢測出西瓜盆栽土壤內部信息。電動自走式溫室盆栽土壤信息采集裝置在作業時穩定可靠,降低了勞動強度,節省了人力成本,相比人工采集而言提高了盆栽信息采集的效率,為設施農業盆栽環境信息監測、營養監控和補給控制的研究提供了借鑒意義。
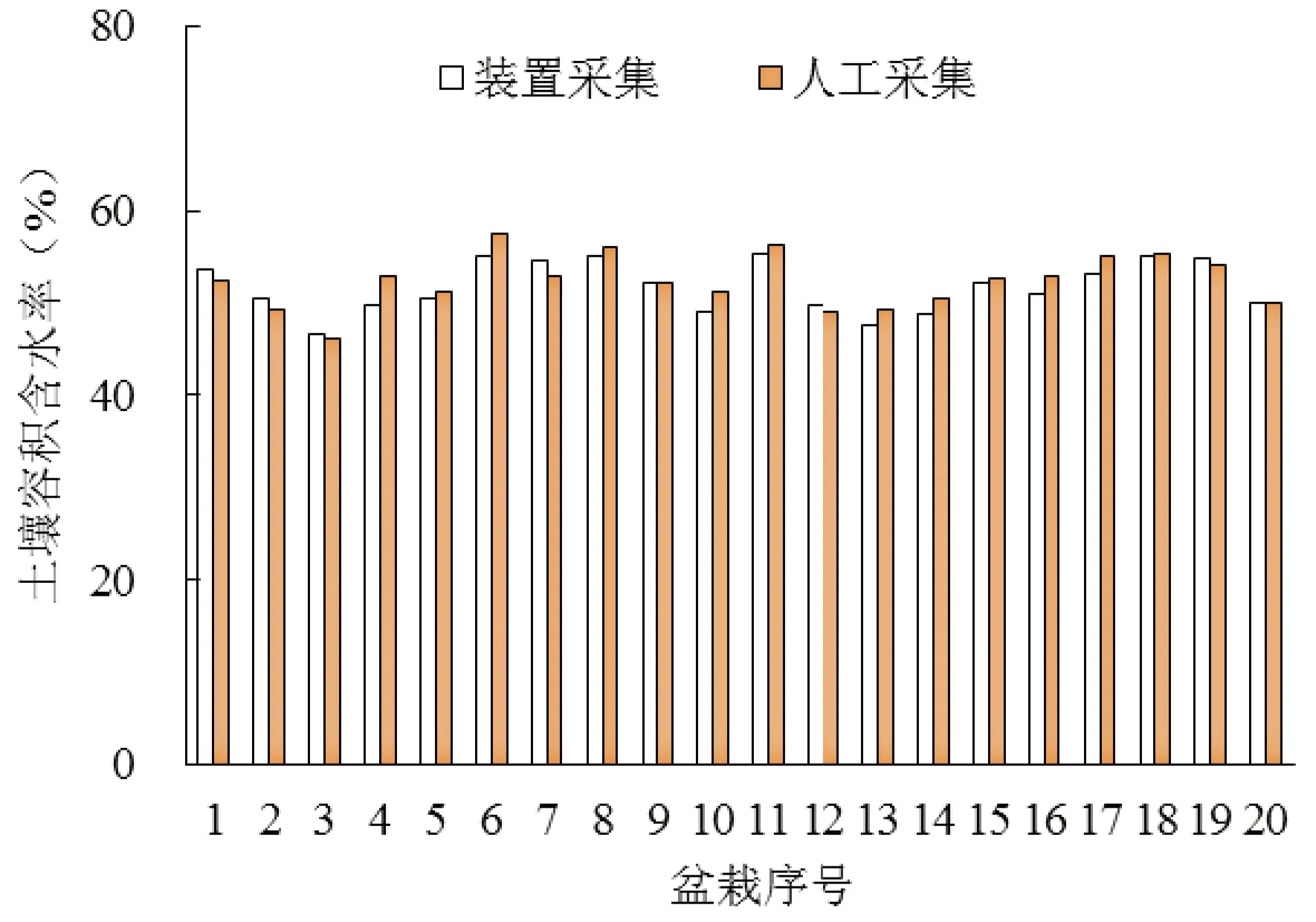
圖8 西瓜盆栽土壤人工采集與裝置采集結果對比Fig. 8 Comparison of artificial and device acquisition
參考文獻:
[1] 黎志康. 我國水稻分子育種計劃的策略[J]. 分子植物育種,2005, 3(5): 603-608.Li Z K, Strategies for molecular rice breeding in China[J].Molecular Plant Breeding, 2005, 3(5): 603-608.
[2] 潘海兵, 萬鵬, 黎煊, 等. 基于自動導引小車系統盆栽水稻高通量輸送系統的設計[J]. 農業工程學報, 2014, 30(4): 136-143.Pan H B, Wan P, Li X, et al. Design of high throughput conveyor system of potted rice based on automated guided vehicle system[J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(4): 136-143.
[3] 楊信廷, 吳滔, 孫傳恒, 等. 基于WMSN的作物環境與長勢遠程監測系統[J]. 農業機械學報, 2013, 44(1): 167-173.Yang X T, Wu T, Sun C H, et al. Remote monitoring system of crop environment and growing based on WMSN[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(1):167-173.
[4] 王立舒, 丁曉成, 時啟凡. 基于微型自動導引運輸車的盆栽作物數據采集系統[J]. 農業工程學報, 2014, 30(16): 17-24.Wang L S, Ding X C, Shi Q F. Data collection system of greenhouse corps based on micro automated guided vehicle[J].Transactions of the Chinese Society of Agricultural Engineering,2014, 30(16): 17-24.
[5] Pasgianos G D, Arvanitis K G, Polycarpou P, et al. A nonlinear feedback technique for greenhouse environmental control[J].Computers & Electronics in Agriculture, 2003, 40(1): 153-177.
[6] Ji M, Xia J. Analysis of vehicle requirements in a general automated guided vehicle system based transportation system[J].Computers & Industrial Engineering, 2010, 59(4): 544-551.
[7] 趙命華, 李康, 丁偉. 一種盆栽管理系統: 201510333236.1[P].2015-08-26.Zhao M H, Li K, Ding W. A potted management system:201510333236.1[P]. 2015-08-26.
[8] 王鳳花, 張淑娟. 精細農業田間信息采集關鍵技術的研究進展[J].農業機械學報, 2008, 39(5): 112-121.Wang F H, Zhang S J. Research progress of the farming information collections key technologies on precision agriculture[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(5): 112-121.
[9] 楊紹輝, 楊衛中, 王一鳴. 土壤墑情信息采集與遠程監測系統[J]. 農業機械學報, 2010, 41(9): 173-177.Yang S H, Yang W Z, Wang Y M. Remote collecting and monitoring system of soil moisture content information[J].Transactions of the Chinese Society for Agricultural Machinery,2010, 41(9): 173-177.
[10] 李慧, 劉星橋, 李景, 等. 基于物聯網Android平臺的水產養殖遠程監控系統[J]. 農業工程學報, 2013, 29(13): 175-181.Li H, Liu X Q, Li J, et al. Aquiculture remote monitoring system based on IOT Android platform[J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(13): 175-181.
[11] 李輝, 左欽月, 羅科, 等. 跨農業: 研制水稻智能育種機器人的探討[J]. 中國生物工程雜志, 2014, 34(5): 116-121.Li H, Zuo Q Y, Luo K, et al. Transagriculture: A discussion on developing intelligent rice breeding robot[J]. China Biotechnology,2014, 34(5): 116-121.
[12] 黃文晉, 侯時迪, 趙聰, 等. 基于GSM網絡的農田灌溉智能控制系統[J]. 物理通報, 2014(12): 123-124.Huang W J, Hou S D, Zhao C, et al. Intelligent control system of farmland irrigation based on GSM network[J]. Physical Communications, 2014(12): 123-124.
[13] Vivaldini K, Rochal F, MartarelliI N J, et al. Integrated tasks assignment and routing for the estimation of the optimal number of AGVS[J]. International Journal of Advanced Manufacturing Technology, 2016, 82(1-4): 719-736.
[14] 陳致水, 張燕, 梁棟, 等. 振動篩式馬鈴薯收獲機的設計[J].農機化研究, 2012, 34(4): 84-87.Chen Z S, Zhang Y, Liang D, et al. Design of potato harvester in shaker-style[J]. Journal of Agricultural Mechanization Research,2012, 34(4): 84-87.
[15] 陳進, 楊廣靜, 徐凱, 等. 基于ARM的聯合收割機遠程監測系統設計[J]. 電子科技, 2016, 29(1): 131-135.Chen J, Yang G J, Xu K, et al. Combine harvester remote monitoring system based on ARM[J]. Electronic Science and Technology, 2016, 29(1): 131-135.
[16] 申屠留芳,張洪宇,楊剛, 等. 溫室大棚電動自走式撒肥機的設計[J]. 農機化研究, 2013, 35(9): 145-147, 155.Shen T L F. Zhang H Y, Yang G, et al. Design of greenhouse electric self-propelled fertilizer distributor[J]. Journal of Agricultural Mechanization Research, 2013, 35(9): 145-147, 155.
[17] 王廣豐, 趙東標. 基于ARM處理器的嵌入式數控系統[J]. 機械與電子, 2007, 25(2): 26-28.Wang G F, Zhao D B. Embedded CNC system using ARM processor[J]. Machinery and Electronics, 2007, 25(2): 26-28.
[18] 余歡, 劉勇, 鄭秀國, 等. 基于STM32的農業環境數據采集終端設計與開發[J]. 上海農業學報, 2016, 32(4): 140-146.Yu H, Liu Y, Zheng X G, et al. Design and development of agricultural environment data collection terminal based on STM32[J]. Acta Agriculturae Shanghai, 2016, 32(4): 140-146.
[19] 鐘澤宇. 基于STM32的農田土壤信息采集系統[J]. 農業與技術, 2016, 36(14): 24-24.Zhong Z Y. Study on farmland soil Information collection system based on STM32[J]. Agriculture and Technology, 2016, 36(14):24-24.
[20] 陳進, 季園園, 李耀明. 基于PLC和觸摸屏的聯合收割機監控系統設計[J]. 儀表技術與傳感器, 2014(7): 78-81.Chen J, Ji Y Y, Li Y M. Monitoring system of combine harvester based on PLC and touch-screen[J]. Instrument Technique and Sensor, 2014(7): 78-81.
[21] 翟順, 王衛紅, 張衎, 等. 基于SIM900A的物聯網短信報警系統[J]. 現代電子技術, 2012, 35(5): 86-89.Zhai S, Wang W H, Zhang K, et al. IOT SMS alarm system based on SIM900A[J]. Modern Electronics Technique, 2012, 35(5): 86-89.
[22] 劉善林. 曲柄滑塊機構中滑塊最大速度的位置探討[J]. 機械,2008, 35(7): 18-19.Liu S L. Research on position of maximum slider velocity in slider-crank mechanism[J]. Machinery, 2008, 35(7): 18-19.
[23] 喬玉蓉, 張星, 程建云. 基于ZigBee的小型溫室環境信息控制系統[J].電子科技, 2016(2): 99-101.Qiao Y R, Zhang X, Cheng J Y. Environmental information control system for small greenhouse based on ZigBee[J]. Electronic Science and Technology, 2016(2): 99-101.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中華手工(2017年2期)2017-06-06 23:00:31
科技知識動漫(2016年8期)2016-07-29 20:40:09
海峽科技與產業(2016年3期)2016-05-17 04:32:12
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
中外會展(2014年4期)2014-11-27 07:46:46