北斗衛星導航系統在海上艦船實時定位中的應用?
2018-03-23 01:09:22白帆
艦船電子工程 2018年2期
白 帆
(解放軍92941部隊95分隊 葫蘆島 125000)
1 引言
在工作中,我們經常要對海上艦船進行遠距離跟蹤定位測量,目前我們的跟蹤手段主要有光測、雷測和無線電衛星定位等方式。光測對氣象條件要求較高且測量距離受限,不能進行超視距測量,衛星定位能夠全天候實時進行精確定位但是不能實時回傳定位數據,由于艦船的空間、電磁干擾和持續供電的限制,一般不適合采用大功率的數傳設備,對艦船指揮和實時數據的利用帶來了很多約束,給工作帶來了很多不便。我們利用北斗導航系統的短報文功能,不僅能夠實時回傳定位數據還能夠對測量設備進行遙控指揮、目標監測等,極好地解決了這一難題,為實時艦船數據采集提供了極大的便利。
2 北斗衛星導航試驗系統
北斗衛星導航試驗系統又稱北斗一號,是中國的第一代衛星導航系統,即有源區域衛星定位系統。該系統服務范圍為東經70°~140°,北緯5°~55°。該系統由四顆(兩顆工作衛星、2顆備用衛星)北斗定位衛星(北斗一號)、地面控制中心為主的地面部份、北斗用戶終端三部分組成。
北斗一號衛星定位采用雙星定位體制,地面控制中心通過兩顆衛星向用戶廣播用戶問信號(出站信號),并根據用戶響應的應答信號(入站信號)測量并計算出用戶到兩顆衛星的距離;然后根據地面控制中心存儲的數字地圖或用戶自帶測高儀測出的高程算出用戶到地心的距離,根據這三個距離就可以確定用戶的位置,并通過出站信號將定位結果告知用戶[1]。
北斗衛星定位系統具有短報文功能,主要是具有雙向通信的作用,通過衛星發送北斗短報文信息。短報文發送方首先將包含接收方ID號和通訊內容的通信申請信號加密后通過衛星轉發入站。地面中心站接收到通信申請信號后,經脫密和再加密后加入持續廣播電文中,經衛星廣播給用戶。接收方用戶機接收出站信號,解調解密出站電文,完成一次通訊[3]。
3 系統組成與功能
3.1 系統組成
基本系統由一個監控中心和用戶臺組成。用戶臺安裝于被測載體上,利用北斗衛星定位系統的簡短數字報文通信功能實現監控中心與用戶臺之間的數字通信。目標用戶臺用于動態監測被測載體的當前位置、工作狀態、能源消耗、故障等情況的數據,對數據進行加密編碼后通過衛星通信信道將數據發送至監控中心,并能夠對監控中心的指令進行解碼,實現遠程控制目標用戶臺的工作狀態。目標用戶臺由繼電器、CU控制電路、艦載北斗衛星用戶機及衛星收發天線五大部分組成,其組成框圖如圖2所示。
監控中心在硬件上由北斗衛星定位指揮系統指揮型用戶機、路由器、交換機、服務器、磁盤陣列、監控計算機、顯示系統及不間斷電源組成。如圖3所示。
3.2 系統主要功能
1)目標監控功能。利用北斗衛星定位系統的簡短數字報文通信功能,實現目標用戶臺與監控中心的雙向數字通信,全程收集被測載體的動態信息,主要包括載體當前位置、工作狀態、能源消耗、故障等信息[6]。
2)遙控開關設備功能。采用北斗定位系統可以遠程設置北斗用戶機的定位和通信頻度。通過發送一些指令來控制電源的開關來控制用戶臺的開關機和用戶臺定位的頻率。控制指令如表1所示。
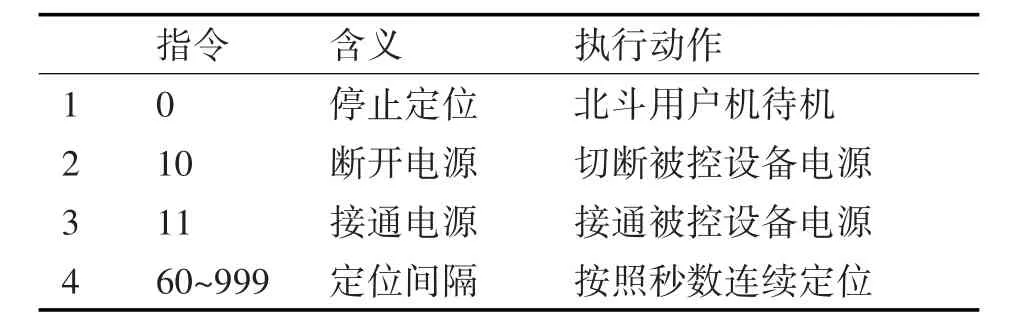
表1 監控中心發送有效指令表
3)數據傳輸功能。利用北斗衛星定位系統的簡短數字報文通信功能,實現目標用戶臺與監控中心雙向無線數據通信。可以傳輸其他設備的定位數據,傳輸的數據可以是靜態數據、動態數據、指揮決策數據和文件等。
4 工程應用
在某海域艦船測量中,需要高精度實時監控艦船動態,應用北斗衛星導航系統實時回傳艦船定位數據的測量系統。氣溫接近-20℃且高海況的惡劣環境下,無人看管安全值守50h,工作中定位設備接收開關機指令十二次,均成功響應,連續傳遞高精度定位數據10h。該系統關鍵技術如下:
1)硬件單元
該系統中心采用了北斗一號指揮型用戶機,該產品可同時接收3顆北斗衛星6個波束的信號。用戶機采用“一線通”設計原理,天線與主機之間采用一根同軸電纜連接,使得安裝更加可靠、便捷。
2)軟件單元
該系統數據采集軟件裝在移動用戶終端上,實現艦船GPS位置上報;采集數據的分包處理,并將分好的包自動按照北斗設備的最大處理能力上報到指揮終端,實時檢測和顯示北斗設備狀態(如圖4所示)。
該系統能夠實現遠距離實時艦船位置測量傳輸,在科研訓練、遠洋航行中發揮了重要作用,該系統在長期應用中有以下特點:
1)待機長時間無人值守,使用鋰電池可以連續工作72h。
2)體積小、重量輕,攜帶方便,設備自身可以供電便于海上艦船安裝。
3)可靠性高,北斗衛星通信可靠,可以保證數據傳輸中的安全性,遙控指令收發成功率高無誤碼。
5 結語
綜上所述利用北斗衛星導航系統的簡短數字報文通信功能,綜合應用電子海圖、計算機網絡、數據庫管理等成熟理論與技術,能夠實現實時對海上艦船的監控與測量。根據幾年的實際應用該系統運行穩定,徹底解決了工作中對海上艦船的實時測量需求,能夠方便準確地將海上遠距離目標測量數據實時回傳。
[1]邊少鋒,紀兵,李厚樸編著.衛星導航系統概論[M].北京:測繪學出版社,2016:151-155.
[2]劉大杰,施一民,過靜珺.全球定位系統(GPS)的原理與數據處理[M].上海:同濟大學出版社,2003.
[3]黃智剛.無線電導航原理與系統[M].北京:北京航空航天大學出版社,2007.
[4]劉建業,曾慶化,趙偉等.導航系統理論與應用[M].西安:西北工業大學出版社,2010.
[5]劉基余.GPS衛星導航定位原理與方法[M].北京:科學出版社,2005:374-380.
[6]陳曉東等.全球衛星導航系統天線[M].北京:國防工業出版社,2015:39-53.
[7]于龍洋,王鑫,李署堅.基于北斗短報文的定位數據壓縮和可靠傳輸[J].電子技術應用,2012,38(11):108-111.
[8]鄧玉芬,張博,張明亮.基于北斗衛星的海洋調查測量監控系統的設計與實現[J].現代電子技術,2012,35(19):104-105.
[9]蘇牡丹等.北斗衛星導航系統遠洋評估試驗及初步結果[J].飛行器測控學報,2013 ,32(5):449-453.
[10]郭建麟等.北斗接收機定位校準試驗[J].計測技術,2015 ,35(4):58-61.
[11]張尚悅,王郁茗,于政國.基于北斗通信的AIS信息自適應篩選技術研究[J].艦船科學技術,2015 ,37(11):111-115.
[12]吳海樂等.基于北斗的海事長報文傳輸解決方案[J].全球定位系統,2015 ,40(8):37-40.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
