基于PLC的小型無人船控制系統的研制
2018-03-23 01:09:18張少明梁家銓蔣祖星
艦船電子工程 2018年2期
張少明 崔 浩 梁家銓 蔣祖星
(1.廣東交通職業技術學院 廣州 510800)(2.廣東省船舶自動化工程技術研究中心 廣州 510800)
1 引言
運載工具的智能駕駛技術作為一個新興的技術得到了社會的廣泛關注,相對于蓬勃發展的無人機技術,無人船技術則嚴重滯后。我國有著豐富的海岸線與海河水域,無人船技術及其產品具有廣闊的市場前景,目前僅極少數企業在進行針對水質監測和水底測繪方面的無人船產品研制。隨著國家海洋戰略和海洋防污染方面的國際公約和強制法規的實施,無人船在海面污染狀況監測與清污作業、水面遠程醫療服務、特殊海洋環境作業等領域將具有不可估量的社會經濟價值[1]。
本文運用PLC技術設計和制作了小型無人船舶及其智能控制系統,并通過航行試驗驗證了技術可行性。通過加裝智能傳感器、無線透傳、GPS定位和視頻監控等功能模塊及大數據分析處理技術,可實現船岸信息通訊、無人船智能控制、自動巡航運算,海面污染狀況監測、海上急救物資輸送、海洋特殊環境作業等功能[2]。
2 方案設計
2.1 目標
實現智能航行,智能航行系指利用計算機技術、控制技術等對感知和獲得的信息進行分析和處理,對船舶航路和航速進行設計和優化;航行時,借助岸基支持中心,船舶能在開闊水域、狹窄水道、復雜環境條件下自動避碰,實現自主航行[3]。
實現一對多的上位機控制方式,若采用無線透傳的近距離遙控模式,采用信道管理方式,通過不同頻率的通道管理各無人船,最多可達64艘船舶,如圖1所示。
2.2 功能與硬件
主要功能:以PLC控制為核心,操控調節二臺直流吊艇電機轉速進行無人船航速與航向操控,實現基本水面溫度、水深等一般水文測量,完成活動水面油污抽取檢測裝置設計,即15ppm海面油污信號采集[4];通過PLC的RS485端口連接的433MHz~480MHz無線透傳傳輸模塊[5]作為主要通信模式組合4G網絡模塊相結合的遙控技術并配置BaiduGIS定位模塊;力控組態完成上位機人機界面與后臺數據庫管理,運用其策略組運算進行自主航行計算;實現上位機監控與自主航行功能的小型無人船舶。
方案省去了檢測船舶航向的羅經設備和控制船舶航向的操舵設備,采用雙艇外直流電機提供動力,并通過調節雙電機轉速操縱船舶轉向控制。訂制長度1.4m船模,具備防水防撞防磨損裝置,船體帶有警燈、警報器等警示、視頻監控裝置及避障系統,采用閉孔泡沫填充、全封閉防水和上下隔艙等防沉設計,擁有一定船艙空間,12V直流有刷吊艇電機,1800轉/min,額定電流20A,12V鋰電池2組供電,滿足一定的續航能力。
3 PLC端口與程序
選用可編程控制器定制國產PLC:ZK2N-32MR-11AD-2DA,32路開關量輸入/出端口,11路A/D輸入端口可接標準(0~10V)電信號傳感器,2路D/A端口控制2臺直流電機,另外4路100KHz高速輸入端口X0~X3可作為脈沖式傳感器使用,預留一定的擴展端口。根據PLC各端口的類型與功能,合理分配其輸入輸出端口。其中RS485端口接無線傳輸模塊,編程口為RS232,編程方式參考三菱,PLC端口與寄存器使用分配如表1和表2。
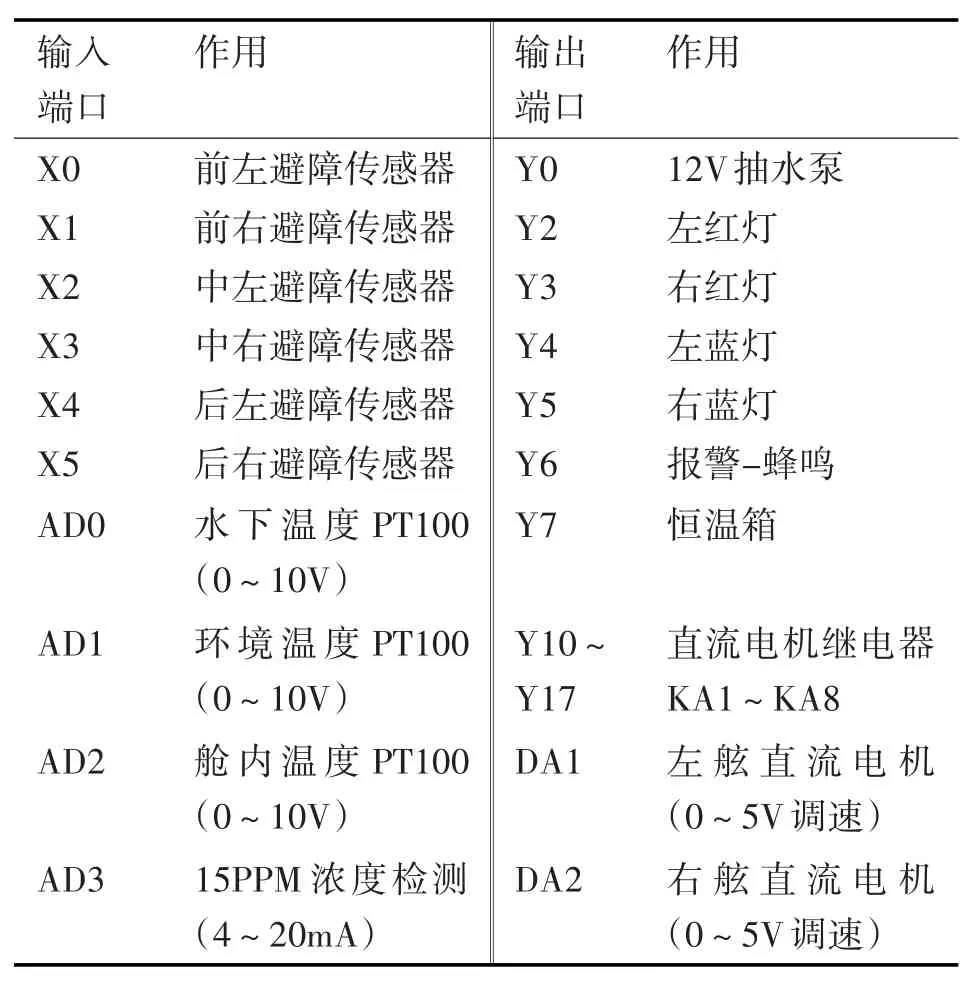
表1 PLC輸入/輸出端口分布表
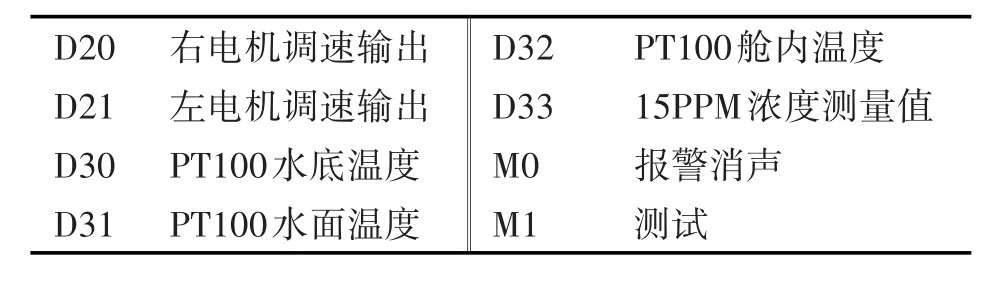
表2 PLC寄存器引用參數表(部分)
PLC內部使用D20與D21寄存器作為電機調速輸出,其范圍值為16位二進制數(0~4095)對應0~10V的D/A輸出,而電機調整模塊僅為0~5V調速范圍控制,運算取值范圍0~2000。
RS485串口通訊參數在D8120設置,PLC運行后生效(stop時D8120復位為0),MODBUS-RTU從站站號在D8121設置(范圍:1~255);設0號無人船為主站,其余為從站,從站數據先送至主站PLC寄存器,再由上位機讀取[6]。
D20與D21寄存器數據讀取程序以及主站D120讀寫1號從站D20寄存器程序如下:
Ldm8000
Wr3a K0D0D20 &&把16位D20寫出至K0通道直流電機調速器,D0是為下限數;
Wr3a K1D0D21 &&DA輸出通道K1,三菱FX1N僅為8位二進制數據,此為16位。
FROM H301D10D110 K1 &&將1號從站寄存器溫度參數D10數據讀至0號主站D110,H301讀寄存器指令,從機地址1;
TO H601 D20 D120 K1&&將0號主站D120數據寫到1號從站寄存器D20,H601寫寄存器指令,從機地址1,控制1號船舶左舷轉速參數;
……
上位機組態只需要改變數據庫組態數據,即可讀取或改變主站D20、D21、以及D110、120等寄存器數據,實現遠程操控。
4 軟件設計
4.1 人機界面軟件
上位機選用力控Forcecontrol6.1,力控組態軟件基本的運行環境分為三個部分,包括HMI(VIEW)人機界面、數據庫DB、通訊程序IO/SERV?ER。借助其強大的HMI(VIEW)人機界面功能完成無人船監控界面的繪制;通訊程序IO/SERVER完成無人船與上位機的數據通信傳輸;并通過數據庫DB將完成通信數據記錄與管理,隨時調用測試和分析,人機界面如圖2所示。
所設計的實時數據庫系統由管理器和運行系統組成,實時數據庫運行系統可以完成對生產實時數據的各種操作:如實時數據處理、歷史數據存儲、統計數據處理、報警處理、數據服務請求處理等。管理器是管理實時數據庫的開發環境(DbMan?ager),通過DbManager可以生成實時數據庫的基礎組態數據,來供運行系統調用[7]。如表3所示。
4.2 控制程序
上位機程序控制流程[8]如圖3所示。
4.3 自主航行算法
采用簡單的PID位置算法,實現定點自主航行,如圖4所示,定出終點坐標B,可得航線AB函數;根據GPS每秒反饋回的坐標位置坐標(X1,Y1),計算出產生偏航角θ=arctan與偏航距離e=得控制離散公式:
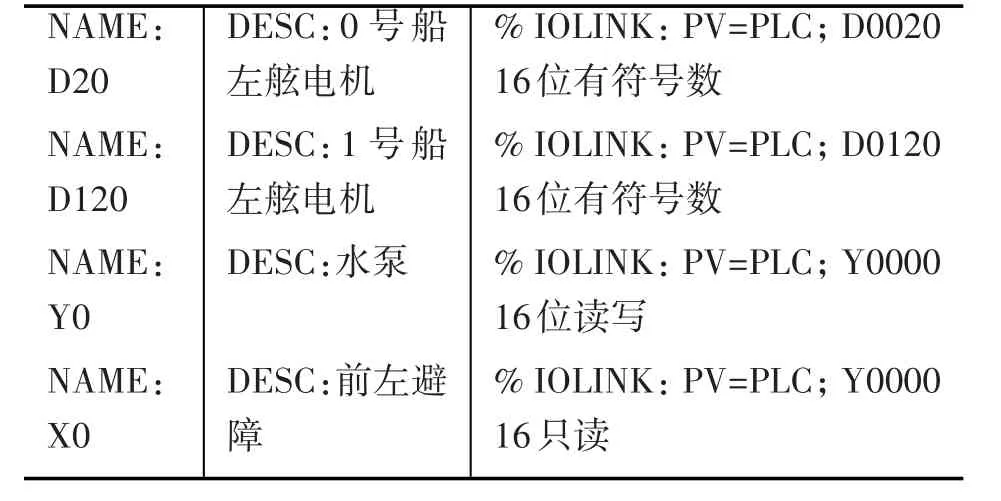
表3 數據庫組態
如果采樣周期足夠小,則U(n)的近似計算可以獲得足夠精確的結果,離散控制過程與連續過程十分接近,具體的PID參數必須由具體對象通過實驗確定[9]。計算過程在上位機組態策略控制中進行,控制輸出值為PLC中左舷電機D20與右舷電機D21。
當U(n)=0;D20∝U(n),D20=D21賦值,保持航向與航速前進,可手動調速;當U(n)>0;D20∝U(n),D21=-D20右轉向;反之則反。
為提高自助巡航能力,可在原有基礎上結合車載導航系統使用的Dijkstra算法和A*算法,并對傳統的規劃算法進行改進,即最優路徑搜索算法[10],結合了無人船自有的避碰傳感器進行避碰操作控制,可實現更加復雜的自助巡航設計。
5 實船與自動航行測試
實船具有在開闊水域自主航行的能力,船舶設有開闊水域自動避碰系統,可按預定的航路實現自動避碰,并進行自主航行,符合III計算機系統的要求。下水巡航可達4h(2m/s下),高速2h(4m/s下),無線透傳模塊測試正常如圖5所示。
自主航行算法處理中,Kp=0.6Ku、Ti=0.5Tu、Td=0.12Tu值取經驗法值,U(n)、D20、D21值變化較快,導致電機轉速變化過快,船舶操控性變差,實際取值操作中將GPS采樣降為2s采樣一次,基本能完成定點導航功能[12]。不同船型大小、電機功率及定位傳感器信號精度等均影響控制效果,取值參考意義不大。
6 結語
設計無人船能將無人船的數據信息發送回上位機控制基站,可實現手動控縱與基本自助航行能力,完成水質采樣、定位、姿態、無人船工作狀態等航行控制及其他野外作業任務,各類數據信息的采集與傳輸正常,操控功能的實現性、數據采集的快速性和準確性、系統運行的可靠性等均能實現目標要求。進一步研究的問題是提高自助巡航精度與準確性,因選用精度普通的定位器,導致單坐標定位誤差較大,需不停計算船位,會出現短暫停止,耗時較長甚至跑偏等問題出現,可以通過提高測量精度或加裝羅經航向測量等傳感器加以研究改善。
[1]嚴新平.智能船舶的研究現狀與發展趨勢[J].交通與港航,2016,7(1):25-28.
[2]龔瑞良,吉雨冠.智能船舶技術和無人駕駛技術研究[J].船舶,2016(05):82-87.
[3]中國船級社,智能船舶規范2015[S],2016:4-7.
[4]張少明,崔浩,區錦品等.一種遙控海面油污濃度監測裝置.中國,ZL201610304378.X[P].2016.
[5]張少明,區錦品,王海松等.一種用于無人船的無線遙控系統及具有其的無人船:中國,ZL201520365602.7[P].2017.
[6]張少明,張禧博,黃梓康.MODBUS在工控PLC的應用[J].機電工程技術,2016,45(04):43-45.
[7]龔運新,顧群,陳華.工業組態軟件應用技術(第2版)[M].北京:清華大學出版社,2013,09:60-68;
[8]黃國良,徐恒,熊波等.內河無人航道測量船系統設計[J].水運工程,2016,511(1):162-168.
[9]胡江強.基于遺傳優化的船舶航向混合智能控制[D].大連:大連海事大學,2003.
[10]滕文.車載導航系統最優路徑搜索算法研究[J].自動化與儀器儀表,2016,206(12):179-180.
[11]吳青,王樂,柳晨光等.基于MPC的無人船運動控制及可視化仿真系統實現[J].武漢理工大學學報(交通科學與工程版),2016,40(2):245-250.
[12]王三軍.GPS導航電子地圖的應用研究[D].上海:同濟大學,2007.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
財經(2017年2期)2017-03-10 14:35:35
財經(2016年15期)2016-06-03 07:38:02
財經(2016年3期)2016-03-07 07:44:46
