基于AD5436的六自由度并聯機器人半實物仿真
2018-03-21 06:34:13江蘇理工學院
機械工業標準化與質量 2018年3期
江蘇理工學院□武 洋
六自由度并聯機器人作為一個多輸入、輸出系統,它具備強耦合性和非線性的動力學特性,很難有一種控制系統能夠滿足所有此類型機器人的系統要求。因此,在設計控制系統時就必須使其滿足:具備開放式的結構、能夠將傳統的控制程序代碼轉換成為機器人軌跡的相關參數,并以工業計算機和相關運動控制器為基礎,從而滿足控制系統的可移植性、可擴展性、可協同性等“開放”性要求。本文采用模糊PID控制,其控制參數能夠隨環境的變化實現在線實時調節,并且引入AD5436半實物仿真控制器,利用AD5436與MATLAB/Simulink的無縫連接,搭建雙閉環控制模型,并自動生成程序代碼,通過以太網實現計算機 (PC)與AD5436的數據通信。利用AD5436的人機交互工具,對六自由度并聯機器人的輸入參數和輸出結果進行監控和調整。
1 雙閉環控制策略
本文的MATLAB/Simulink模型是基于雙閉環控制策略進行設計搭建的,其控制原理圖如圖1所示,外環采用空間中的六個姿態變量為參數進行控制,內環采用六個支桿位置變化量為參數進行控制,運動平臺和靜平臺之間連接有姿態控制裝置,姿態控制裝置包括伺服電機和設置于每個伺服電機上的位置傳感器,以此來達到運動平臺高精度姿態控制。
(1)內環PID控制
為了能更加清楚地觀察到PID閉環控制的精度,將內環支路的反解得到的預期運行軌跡與閉環PID控制得到的軌跡圖做了對比。圖2為單路支路PID閉環控制框圖。
利用MATLAB/Simulink對閉環PID控制策略建立仿真模型并進行仿真,結構體見圖3。
根據以上建立的模型可知,六自由度運動平臺的支路控制模型主要有兩部分組成,其中一部分為位姿參數的反解函數,根據單個運動桿已知的姿態參數反解出其運動的位移量。另一個部分就是PID控制部分,主要調節姿態參數反解出的位移量與傳感器返回的位移量之間的差值。
六自由度并聯平臺支路的閉環模型的仿真結果與實際姿態參數解算出的位移曲線對比如圖4所示。由于運動平臺的六個支路基本類似,所以只輸入其中一路的基本參數模擬仿真對比,其他支路類似。
實驗結果分析:在圖4中分別給出了三個信號,即實際正解信號、位移傳感器返回信號及PID調解后的信號。通過正解信號與傳感器返回信號比較,傳感器返回信號曲線一直滯后正解信號曲線0.3s左右。而比較正解信號與PID調節后信號曲線可以發現,兩者基本不存在時間不協調的情況,主要誤差出現在最大值與最小值的位置,最大相差3mm~4mm,這就要求使用外環控制進一步消除誤差,提高控制精度。
(2)外環模糊PID控制
在6-SPS運動平臺內環PID控制的仿真模型的基礎上分別建立了外環模糊PID控制和經典PID控制仿真模型。給各個仿真模型系統添加一個0.1幅值的階躍信號,整體系統的響應曲線如圖5所示。
從圖5中可以得知,單一的PID控制器的輸出信號的超調量很明顯地大于模糊PID控制器,PID控制器的穩定調節時間大致在0.25s~0.3s的范圍內,而模糊PID控制器的穩定調節時間大致在0.2s左右以后。經過比較可以明顯發現在輸入信號為階躍信號時,模糊PID控制器的控制效果要比單一的PID控制器的效果好。

圖1 雙閉環系統控制原理圖

圖2 單路支路開環控制框圖

圖3 閉環PID控制模型
之后再為模型添加一個周期為1s的方波信號,此時的系統響應曲線如圖6所示。從圖中可知,方波信號的上升或下降時無論是單一的PID控制器還是模糊PID控制器都會有一定的誤差,在 0.1s~0.2s, 0.5s~0.6s, 1.1s~1.2s, 1.5s~1.6s這四個時間段內,都發生了偏差,普通PID控制的偏差值在0.09~0.115和-0.015~0.01之間,而模糊PID控制的偏差值在0.09~0.1和0~0.01之間。所以模糊PID控制方法比普通PID控制方法更為優越。
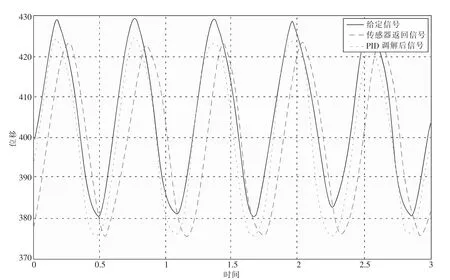
圖4 反解位移、PID控制后位移與給定位移曲線對比
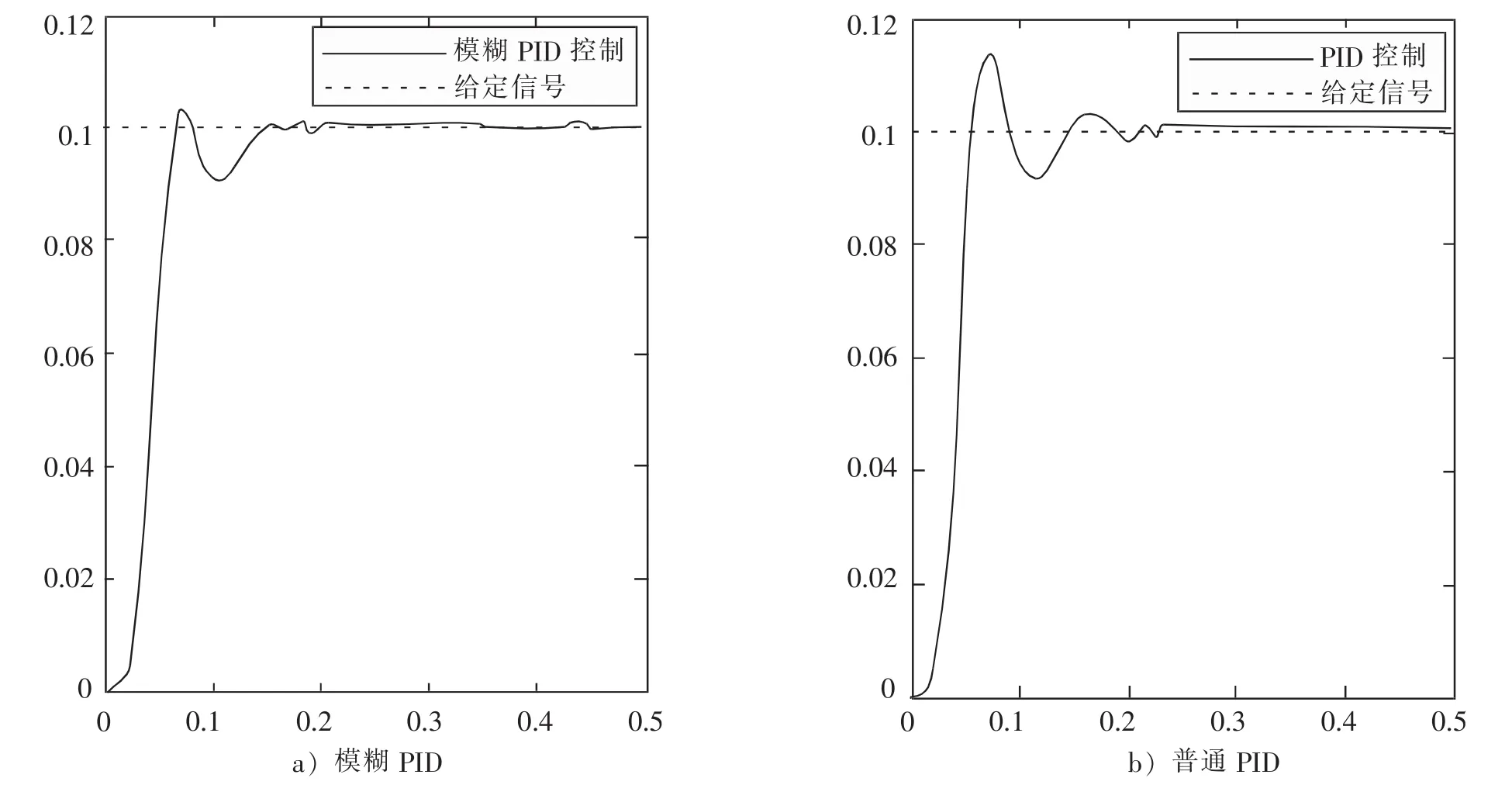
圖5 系統階躍信號響應曲線
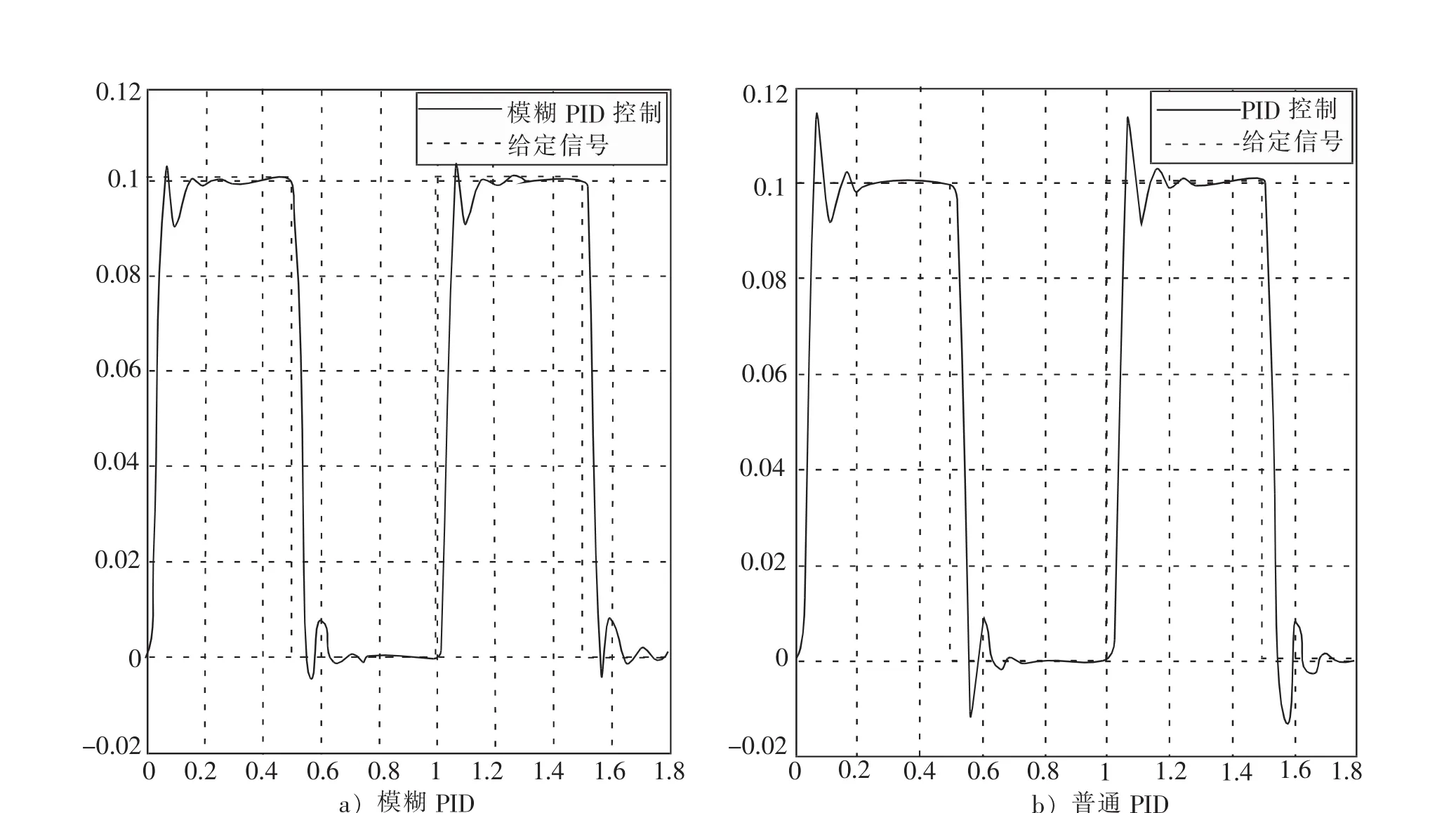
圖6 系統方波信號響應曲線
2 AD5436實時仿真控制系統
AD5436實時控制仿真系統是一套與MATLAB/Simulink完全無縫連接的高速測量和控制系統開發平臺。AD5436軟件總體結構如圖7所示系統可分為三部分:MATLAB/Simulink環境、硬件板卡和虛擬控制臺。MATLAB/Simulink用來構建控制系統模型和控制方法;硬件板卡完成底層I/O接口調用和輸出驅動;細膩控制臺(VCDesigner)用來設計圖形用戶界面,用戶可以創建圖形用戶界面的可編程功能,用以滿足特定的應用和實驗的需要。VCDesigner的人機交互界面包括兩個部分,上位機 (PC)和AD5436界面,當AD5436與PC處于連接狀態時,AD5436從屬于PC機端受PC機控制,當AD5436斷開PC機控制后便可獨立運行測試,AD5436上具有觸摸屏功能的GUI界面,可以獨立控制系統的運行以及系統參數的檢測調試,軟件控制策略設計完成之后,通過PC機與AD5436硬件進行通行完成最后的控制目的。
3 半實物仿真
在雙閉環控制原理的基礎上建立里自由度并聯機器人半實物仿真控制MATLAB/Simulink模型。輸入預期的軌跡正弦波信號 (如圖8所示),將實際輸出的姿態參數與預期參數的偏差值經過模糊PID控制后,經并聯機構運動學模型進行反解運算得到各個運動桿的位移變化量,并將位移量轉換為脈沖量,六個運動桿的脈沖量經AD5430-11控制板卡控制六個伺服電機。單個運動桿的實際位移變化量由AD5430-01A板卡采集,并與反解解算的位移量作差,并對偏移量進行PID控制。
4 實驗仿真結果與分析
在上平臺運動過程中,通過上位機軟件VCDesigner可以直接觀察到六個運動桿運動變化軌跡和上平臺參數變化趨勢,如圖9、圖10所示,其中實線表示實際運行軌跡,虛線表示理想運行軌跡。

圖7 軟件總體結構圖

圖8 正弦輸入信號
圖9 反映的是六自由度并聯機器人運動過程中,各個運動桿的運動位移變化情況。由于給每個運動桿的控制信息都是類似的正弦信號,以伸縮桿當前所處的位置為起點,大致在伸縮桿伸出5cm的位置開始運動,最大位移量為20cm,相對最小位移量為-17.5cm。由上圖可知運動桿的整體運行軌跡與理想的運行軌跡類似。
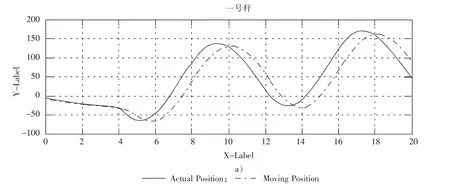
圖9 運動桿變化軌跡

圖9 運動桿變化軌跡 (續)
圖10 反映的是位姿檢測機構上的位移傳感器在X、Y、Z方向上的位移信息,其中實線表示實際位姿變化曲線,虛線表示理想位姿變化曲線。由于上平臺運行的是正弦信號,通過安裝在上平臺下的位姿檢測機構觀察上平臺在X、Y、Z方向上的位移信息,不難發現,其運行結果也近似于正弦信號。
從以上測試結果可以看到,無論是并聯機構的運動桿運動情況還是上平臺的位姿變化情況,雖然與理想運行軌跡出現了微小的偏差,但與預期的運行軌跡基本類似的。因此,本文提出的雙閉環控制策略對于六自由度并聯機器人的控制是可以滿足實際需求的。對于軌跡偏差,分析后得出,是由于樣機中各桿件存在一定的裝配誤差,以及運行過程中機構支桿存在一定的震動等因素所引起。
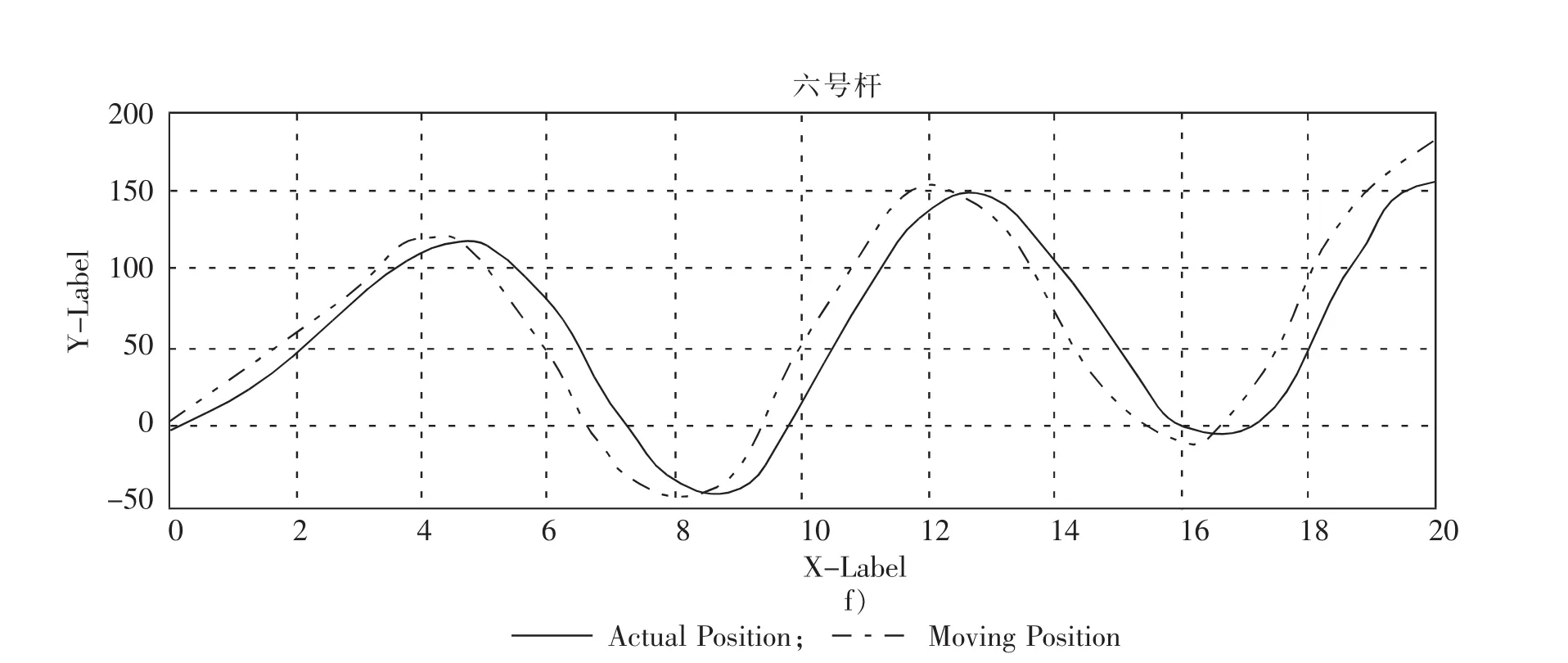
圖9 運動桿變化軌跡 (續)

圖10 動平臺姿態曲線
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03
