PID神經(jīng)網(wǎng)絡(luò)的非線性系統(tǒng)辨識與控制問題分析
2018-03-21 06:59:08孫振保許書娟廣西城市職業(yè)學院
數(shù)碼世界 2018年2期
孫振保 許書娟 廣西城市職業(yè)學院
PID神經(jīng)網(wǎng)絡(luò)作為一種多層向前網(wǎng)絡(luò),它不僅具備逼近能力、非線性變換、并行計算等多種性能,還具備積分、微分、比例等動態(tài)特點,若把PID神經(jīng)網(wǎng)絡(luò)應(yīng)用到非線性系統(tǒng)中,可通過對PID神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)算法的不斷優(yōu)化,制定出一個可行性的PID神經(jīng)網(wǎng)絡(luò)控制方案,通過辨識和控制,達到比較理想的控制效果,改變工業(yè)等控制領(lǐng)域中傳統(tǒng)控制方法不足之處。
1 PID神經(jīng)網(wǎng)絡(luò)系統(tǒng)辨識分析
2×3×1是PID神經(jīng)網(wǎng)絡(luò)的基本結(jié)構(gòu),如下所示:

圖1 PID神經(jīng)網(wǎng)絡(luò)基本結(jié)構(gòu)
由上圖可知,PID神經(jīng)網(wǎng)絡(luò)基本結(jié)構(gòu)中包含了若干個組成部分。包括輸入層神經(jīng)元、積分、微分、比例、微分函數(shù)等等。在PID神經(jīng)網(wǎng)絡(luò)基本結(jié)構(gòu)中其上限限幅值和下線限幅值分別是+1和-1,主要采取反轉(zhuǎn)算法學習方式。而從PID神經(jīng)網(wǎng)絡(luò)系統(tǒng)辨識角度來看,其是選擇一個神經(jīng)網(wǎng)絡(luò)來逼近實際系統(tǒng)的過程。定義如下:

則說明,這個神經(jīng)元組成的向前神經(jīng)網(wǎng)絡(luò)可以任意逼近任何連續(xù)函數(shù)。當向非線性系統(tǒng)中輸入函數(shù)u(k)=0.6sin(2πk/50)+0.4sin(2πk/75)時,PID神經(jīng)網(wǎng)絡(luò)在學習20步、50步之后,被辨別對象將會輸出相應(yīng)的響應(yīng)曲線。如下所示:

圖2 PID神經(jīng)網(wǎng)絡(luò)學習20步后的被辨識對象響應(yīng)曲線
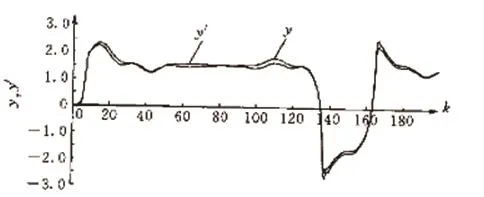
圖3 PID神經(jīng)網(wǎng)絡(luò)學習50步后的被辨識對象響應(yīng)曲線
由上述圖例可知,經(jīng)過PID神經(jīng)網(wǎng)絡(luò)短時間的學習,可更好的優(yōu)化辨識過程,有效反饋被辨識系統(tǒng)性能。PID神經(jīng)網(wǎng)絡(luò)與BP網(wǎng)辨識效果相比,當BP網(wǎng)學習2000次以上時,才能達到PID神經(jīng)網(wǎng)絡(luò)辨識效果。因而,在工業(yè)等控制領(lǐng)域的非線性系統(tǒng)優(yōu)化時,應(yīng)強調(diào)對PID神經(jīng)網(wǎng)絡(luò)的運用,增強系統(tǒng)的整體辨識效果。
2 基于PID神經(jīng)網(wǎng)絡(luò)的非線性系統(tǒng)控制問題
基于PID神經(jīng)網(wǎng)絡(luò)的非線性系統(tǒng)控制需要經(jīng)過以下幾個步驟:
第一,推導控制規(guī)律。本文選用了2-1NNC結(jié)構(gòu)的PID神經(jīng)網(wǎng)絡(luò),在PID神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)確定以后,向系統(tǒng)中輸入了:。而在控制規(guī)律具體推導時,根據(jù)NNI辨識結(jié)果和利用BP學習算法調(diào)整了NNC網(wǎng)絡(luò)的權(quán)值,達到了PID自適應(yīng)控制目的。
第二,NNC輸入的選取。當NNC結(jié)構(gòu)是前向神經(jīng)網(wǎng)絡(luò)時,它輸入是,那么它的輸出便是u(k)。當NNC網(wǎng)絡(luò)輸入節(jié)點是3,輸出節(jié)點是1時,在仿真過程中就會發(fā)現(xiàn)NNC輸入的選取必須考慮非線性系統(tǒng)這個問題,簡化處理NNC網(wǎng)絡(luò)。
第三,PID控制規(guī)律。在NNC結(jié)構(gòu)是兩層前向神經(jīng)網(wǎng)絡(luò)的基礎(chǔ)上,若向系統(tǒng)中輸入。此時,輸出是u(k),則根據(jù)PID規(guī)律可知,3-1是PID網(wǎng)絡(luò)的基本結(jié)構(gòu)。
總之,結(jié)合PID控制策略改進非線性系統(tǒng)自適應(yīng)控制,可進一步提高控制行為有效性、正確性。但是,在利用PID神經(jīng)網(wǎng)絡(luò)優(yōu)化非線性系統(tǒng)控制時,應(yīng)全方位考慮網(wǎng)絡(luò)結(jié)構(gòu)設(shè)計問題,逐一完善網(wǎng)絡(luò)結(jié)構(gòu)中的網(wǎng)絡(luò)隱層數(shù)、各個隱層節(jié)點數(shù)、層間連接關(guān)系、隱性節(jié)點特性等組成要素,并保證在網(wǎng)絡(luò)結(jié)構(gòu)具體設(shè)計時,在其網(wǎng)絡(luò)結(jié)構(gòu)內(nèi)部布置無窮個合理結(jié)構(gòu)的采樣點,任意多個隱節(jié)點,給對象進行逼近,達到最佳的控制效果。此外,在基于PID神經(jīng)網(wǎng)絡(luò)的非線性系統(tǒng)設(shè)計時,應(yīng)充分考慮工業(yè)等控制領(lǐng)域傳統(tǒng)控制方法不包含控制作用變化數(shù)據(jù)的特點,從過去的操作數(shù)據(jù)獲取一些信息的同時,剔除可疑數(shù)據(jù)。同時,由于計算機操作失誤、非正常操作、校驗失誤等等會在一定程度上影響數(shù)據(jù)的采集,應(yīng)盡可能的解決這一問題,以上下限方式,控制數(shù)據(jù)采集界限,更好的完成非線性系統(tǒng)的控制問題。
3 結(jié)論
綜上可知,工業(yè)等控制領(lǐng)域的非線性系統(tǒng)傳統(tǒng)控制方法已經(jīng)無法滿足現(xiàn)代產(chǎn)業(yè)發(fā)展需求,始終達不到比較理想的控制狀態(tài)。在這一背景下,為了提高非線性系統(tǒng)的靈敏度,應(yīng)嘗試在非線性系統(tǒng)研究中應(yīng)用PID神經(jīng)網(wǎng)絡(luò),結(jié)合PID控制策略,改進傳統(tǒng)非線性系統(tǒng)控制方法存在的不足之處,最終將其應(yīng)用于各個控制領(lǐng)域中,不斷提高各個控制領(lǐng)域的控制水平和質(zhì)量。
[1]許素安,金瑋,梁宇恩等.壓電陶瓷遲滯神經(jīng)網(wǎng)絡(luò)建模與線性補償控制[J].傳感技術(shù)學報,2017,20(12):1884-1889.
[2]陸文昌,張勇,張厚忠.輪轂電機驅(qū)動汽車電子差速系統(tǒng)P-模糊PID控制研究[J].機械制造與自動化,2017,46(06):193-196.
[3]汪先兵,費樹岷,徐清揚等.BP神經(jīng)網(wǎng)絡(luò)PID控制的永磁真空開關(guān)儲能電容恒流充電特性分析[J].電工技術(shù)學報,2015,30(10):212-218.
[4]胡錦添,舒懷林.基于PID神經(jīng)網(wǎng)絡(luò)的四旋翼飛行器控制算法研究[J].自動化與信息工程,2015,36(01):18-22.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-11-30 02:58:01
哲學評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2019年7期)2019-11-25 01:43:04
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
