基于對偶四元數(shù)的慣性/衛(wèi)星/天文組合導(dǎo)航系統(tǒng)改進聯(lián)邦濾波方法
2018-03-20 01:50:43閔艷玲熊智邢麗劉建業(yè)殷德全
兵工學(xué)報 2018年2期
閔艷玲, 熊智, 邢麗, 劉建業(yè), 殷德全
(南京航空航天大學(xué) 自動化學(xué)院, 江蘇 南京 211100)
0 引言
捷聯(lián)慣性導(dǎo)航系統(tǒng)不需要接收任何外界信息,僅依靠陀螺和加速度計的測量輸出即可解算出載體的速度、位置、姿態(tài)等運動參數(shù),具有抗干擾能力強、隱蔽性好、導(dǎo)航信息完整和數(shù)據(jù)更新率高等優(yōu)點,但慣性解算屬于積分解算,因此其導(dǎo)航誤差隨時間累積,難以滿足運動載體長時間高精度的導(dǎo)航需求[1]。
衛(wèi)星導(dǎo)航系統(tǒng)定位精度高,導(dǎo)航誤差不隨時間累積,但其信號易受干擾,且在有遮擋的環(huán)境中容易發(fā)生信號丟失或?qū)Ш秸`差變大[2]。天文導(dǎo)航系統(tǒng)利用天文敏感器測得天體的方位信息,從而得到運動載體的姿態(tài)參數(shù),具有自主性強、姿態(tài)測量精度高、誤差不隨時間累積的優(yōu)點,但也易受到環(huán)境干擾[3]。根據(jù)慣性導(dǎo)航系統(tǒng)、衛(wèi)星導(dǎo)航系統(tǒng)、天文導(dǎo)航系統(tǒng)的特點進行有效組合,構(gòu)成慣性/衛(wèi)星/天文組合導(dǎo)航系統(tǒng),可對慣性導(dǎo)航系統(tǒng)中的各誤差項進行補償,從而實現(xiàn)高精度導(dǎo)航。目前,慣性/衛(wèi)星/天文組合導(dǎo)航系統(tǒng)已成為中遠程彈道導(dǎo)航、高空長航時飛行器、空天飛行器中最有效的高性能導(dǎo)航手段[3]。
文獻[4]在姿態(tài)組合過程中,將天文導(dǎo)航輸出的機體相對于慣性坐標(biāo)系的姿態(tài)轉(zhuǎn)化為相對于地理坐標(biāo)系的姿態(tài),轉(zhuǎn)化時耦合了慣性導(dǎo)航系統(tǒng)的位置誤差,影響狀態(tài)量估計精度,未能最大限度地使用天文導(dǎo)航所提供的高精度姿態(tài)信息;文獻[5]針對上述轉(zhuǎn)化過程中的耦合誤差問題,首先在慣性系中利用天文導(dǎo)航輸出對陀螺誤差進行估計和補償,再在地理系下進行位置組合,其中姿態(tài)組合濾波器采用了開環(huán)結(jié)構(gòu),長時間運行存在發(fā)散風(fēng)險;文獻[2]和文獻[4]采用聯(lián)邦濾波器進行慣性/衛(wèi)星/天文組合導(dǎo)航系統(tǒng)的信息融合,主濾波器與各子濾波器狀態(tài)保持一致,因此慣性/天文子濾波器中包含了不可觀測狀態(tài)量;文獻[6]提出了基于對偶四元數(shù)的慣性/天文組合導(dǎo)航算法,但同樣忽略了狀態(tài)的可觀測性問題。
針對上述問題,本文提出了基于對偶四元數(shù)的慣性/衛(wèi)星/天文組合、導(dǎo)航系統(tǒng)改進聯(lián)邦濾波方法,利用基于奇異值分解的可觀測性分析方法建立子濾波器,有效地減少濾波計算量。基于對偶四元數(shù)的降維慣性/天文組合方法,直接利用天文信息進行慣性系姿態(tài)組合,再將慣性系姿態(tài)轉(zhuǎn)換為地理系姿態(tài)。相較于傳統(tǒng)慣性/天文采用地理系姿態(tài)組合的方法,對偶四元數(shù)慣性/天文組合方法受慣性導(dǎo)航位置誤差影響較小,具有更高的組合精度。因此,基于對偶四元數(shù)的慣性/衛(wèi)星/天文改進聯(lián)邦濾波方法可以有效地提高慣性/衛(wèi)星/天文組合導(dǎo)航系統(tǒng)性能,并為其工程化應(yīng)用提供參考。
1 對偶四元數(shù)慣性導(dǎo)航誤差模型
1.1 坐標(biāo)系定義
e表示地球坐標(biāo)系,原點在地心,一個軸與地軸重合,其他兩個軸在赤道面。
i表示慣性坐標(biāo)系,0時刻與地球坐標(biāo)系重合。
b表示載體坐標(biāo)系,即捷聯(lián)慣性器件的坐標(biāo)系,原點在加速度計三元組的質(zhì)心,3個坐標(biāo)軸分別與加速度計敏感軸重合,構(gòu)成右手正交系。
t表示推力速度坐標(biāo)系,與載體坐標(biāo)系平行,從地心到坐標(biāo)原點的向量等于推力速度。
g表示引力速度坐標(biāo)系,與地球坐標(biāo)系平行,從地心到坐標(biāo)原點的向量等于引力速度。
u表示位置坐標(biāo)系,與地球坐標(biāo)系平行,從地心到坐標(biāo)原點的向量等于載體的位置向量。
1.2 誤差模型
對偶四元數(shù)定義為
(1)
式中:q和q′分別為對偶四元數(shù)的標(biāo)量和對偶部分,都是普通四元數(shù);ε2=0,但ε≠0.
對偶四元數(shù)的加性誤差定義為
(2)
式中:qo為對偶四元數(shù)計算值或量測值;q為真實值。
陀螺誤差δωbib和加速度計誤差δfb均建模為常值誤差與高斯白噪聲隨機誤差的線性組合:
(3)
式中:δωbibc為陀螺常值漂移;δωbibs為陀螺隨機白噪聲;δfbc為加速度計常值誤差;δfbs為加速度計隨機白噪聲。
文獻[6-7]對基于加性對偶四元數(shù)的捷聯(lián)慣性導(dǎo)航算法誤差方程進行了詳細推導(dǎo),此處不再贅述。
推力對偶四元數(shù)qit=qit+εq′it刻畫了推力速度坐標(biāo)系t相對于慣性坐標(biāo)系i的一般性剛體運動,其誤差方程為
(4)
式中:fb和ωbib分別是加速度計和陀螺輸出值;°為四元數(shù)乘子。
引力對偶四元數(shù)qig=qig+εq′ig刻畫了引力速度坐標(biāo)系g相對于慣性坐標(biāo)系i的一般性剛體運動,其誤差方程為
(5)
式中:ωeie為地球自轉(zhuǎn)角速度。
位置對偶四元數(shù)qiu=qiu+εq′iu刻畫了位置坐標(biāo)系u相對于慣性坐標(biāo)系i的一般性剛體運動,其誤差方程為
(6)
(7)
式中:q*iu、q*it、q*ig分別為qiu、qit、qig的共軛四元數(shù)。
1.3 狀態(tài)方程
為了方便進行四元數(shù)計算,δωbibc、δfbc均表示為標(biāo)量部分為0的四元數(shù),將其矢量部分分別表示為δΩbibc、δFbc并擴充到狀態(tài)量中,可將文獻[6]中的24維狀態(tài)量簡化到22維;δωbibs、δfbs同樣也可將為0的標(biāo)量部分剔除,僅將其矢量部分δΩbibs、δFbs作為噪聲向量,則噪聲向量由8維簡化到6維,狀態(tài)方程也可相應(yīng)地進行簡化。
由(3)式~(6)式,可建立如下狀態(tài)方程:
(8)
式中:X∈R22×1為狀態(tài)向量,
(9)
F∈R22×22為狀態(tài)轉(zhuǎn)移矩陣;G∈R22×6為噪聲驅(qū)動陣;w∈R6×1為噪聲向量,
(10)
當(dāng)四元數(shù)寫成4維向量q=[s,vT]T時,s為其標(biāo)量部分,向量部分v=[v1v2v3],四元數(shù)乘法[7]可以表示為
(11)
兩個矩陣[q]+和[q]-定義為
(12)
式中:I3為3維單位矩陣;[v×]為向量v生成的反對稱矩陣,
(13)
為簡化矩陣表示,設(shè)存在矩陣T,M(T)表示去除T矩陣第1列后的矩陣。
因此,(8)式中的F陣可表示為
(14)
(8)式中的G陣可表示為
(15)
1.4 量測方程
1.4.1 慣性/衛(wèi)星子導(dǎo)航系統(tǒng)
根據(jù)對偶四元數(shù)捷聯(lián)慣性導(dǎo)航算法的特點,選擇慣性坐標(biāo)系i中的速度誤差和地球坐標(biāo)系e中的位置誤差作為量測向量。對偶四元數(shù)算法解算得到的慣性系速度Vi及地球系位置Re為
(16)
(17)
由于慣性系在1.1節(jié)中定義為0時刻的地球系,即δqig(0)=δqiu(0)=0,且由文獻[7]可知:
(18)
δVi=2(δq′it°q*it-q′it°q*it°δqit°q*it+
δq′ig°q*ig),
(20)
(21)
由于衛(wèi)星導(dǎo)航系統(tǒng)所測得的速度和位置均為地球坐標(biāo)系參數(shù),因此需利用衛(wèi)星的速度測量信息VeGNSS計算載體的慣性系速度ViGNSS. 由速度合成定理及坐標(biāo)系旋轉(zhuǎn)可得
(22)
式中:Cie表示地球系到慣性系的坐標(biāo)旋轉(zhuǎn)矩陣;Vie表示地球系與慣性系之間的相對速度,可通過地球自轉(zhuǎn)角速度和衛(wèi)星導(dǎo)航系統(tǒng)測得的載體位置簡單計算得到。由于地球自轉(zhuǎn)角速度較小,且衛(wèi)星導(dǎo)航系統(tǒng)的位置測量誤差也是小量,因此可以忽略Vie的誤差。在此條件下,設(shè)δVeGNSS為衛(wèi)星導(dǎo)航系統(tǒng)的地球系速度測量誤差,則衛(wèi)星導(dǎo)航系統(tǒng)的慣性系速度測量誤差δViGNSS=CieδVeGNSS. 地球自轉(zhuǎn)角速度的四元數(shù)表示為ωeie=[000ωie],利用標(biāo)量ωie計算可得Cie,
(23)
由于對偶四元數(shù)慣性導(dǎo)航算法解算得到的慣性系速度Vi及地球系位置Re均為標(biāo)量部分為0的四元數(shù),因此只取其矢量部分與衛(wèi)星導(dǎo)航系統(tǒng)測量值的差值作為量測量。由(20)式、(21)式可得慣性、衛(wèi)星子導(dǎo)航系統(tǒng)量測方程為
(24)
式中:Z1∈R6×1為量測向量;H1∈R6×22為系統(tǒng)量測矩陣;V1∈R6×1為系統(tǒng)量測噪聲向量,
(25)
nV∈R3×1為衛(wèi)星導(dǎo)航系統(tǒng)計算得到的慣性系速度量測噪聲,nR∈R3×1為衛(wèi)星導(dǎo)航系統(tǒng)的位置量測噪聲。
設(shè)U(T)表示去除矩陣T的第1行,則系統(tǒng)量測矩陣H1可表示為
(26)
1.4.2 慣性/天文子導(dǎo)航系統(tǒng)
天文敏感器的輸出信息為載體坐標(biāo)系b相對于慣性系i的旋轉(zhuǎn)四元數(shù)qcns,對偶四元數(shù)捷聯(lián)慣性導(dǎo)航算法解算得到的qit為推力速度坐標(biāo)系t相對于慣性坐標(biāo)系i的旋轉(zhuǎn)四元數(shù)。從坐標(biāo)系的定義可知,推力坐標(biāo)系t與載體坐標(biāo)系b平行。因此不需要進行轉(zhuǎn)換,即可將二者差值作為量測量。
慣性/天文子導(dǎo)航系統(tǒng)的量測方程為
(27)
式中:Z2∈R4×1為量測向量;V2∈R4×1為系統(tǒng)量測噪聲向量;H2∈R4×22為系統(tǒng)量測矩陣,
(28)
2 基于可觀測性分析的改進聯(lián)邦濾波器設(shè)計
2.1 基于奇異值分解的可觀測性分析方法
由1.3節(jié)可知,全狀態(tài)量的維數(shù)為22,組合導(dǎo)航系統(tǒng)一般采用卡爾曼濾波器進行信息融合,其計算時間主要由系統(tǒng)狀態(tài)維數(shù)n和量測維數(shù)m決定,每一個濾波周期的計算量與(n3+mn2)呈正比[8]。如果系統(tǒng)的維數(shù)較高,會增加濾波器計算量,導(dǎo)致導(dǎo)航系統(tǒng)的實時性變差。因此在保證導(dǎo)航精度的前提下,提高系統(tǒng)的實時性,具有重要的研究意義。
假設(shè)某動態(tài)系統(tǒng)進行分段線性處理后,各時間段內(nèi)的系統(tǒng)狀態(tài)轉(zhuǎn)移矩陣為Φj(j=1,2,…),量測矩陣為Hj. 對該動態(tài)系統(tǒng),設(shè)在第j個時間段內(nèi)的可觀測性矩陣為Nj,則
(29)
設(shè)時間段個數(shù)為λ,則總時間內(nèi)系統(tǒng)的可觀測性矩陣N(l×n維)為
(30)
對其進行奇異值分解得
(31)
式中:U=[u1u2…ul];V=[v1v2…vn]為正交矩陣;S=[Λr×r0
00],Λr×r=diag(σ1σ2…σr),r、σi(i=1,2,…,r)分別為N的秩和非零奇異值。
奇異值σi是與其對應(yīng)的右奇異向量vi中取得最大絕對值的狀態(tài)所對應(yīng)的奇異值[9]。奇異值的個數(shù)即矩陣N的秩r,決定了可觀測狀態(tài)量的個數(shù)。
2.2 子濾波器狀態(tài)變量可觀測性分析
由于不同的機動情況對狀態(tài)量的觀測性會有所影響,因此分別選擇了勻速機動、加速機動、橫滾機動、俯仰機動、航向機動這5種常見的機動方式對各狀態(tài)量的可觀測性情況進行分析。每次仿真時間為5 s,時間間隔為0.02 s,各機動方式的仿真參數(shù)如表1所示。
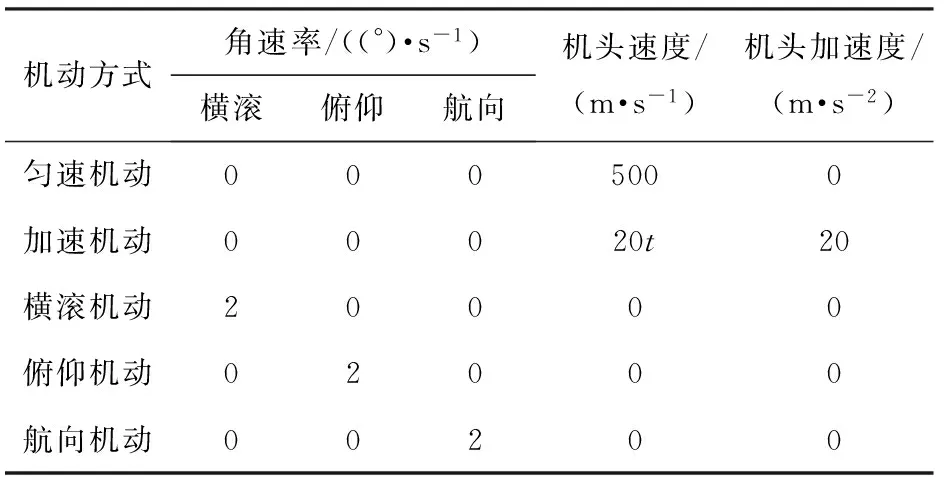
表1 機動參數(shù)設(shè)置
根據(jù)上述仿真條件進行基于奇異值分解的可觀測性分析,發(fā)現(xiàn)在5種機動情況下,慣性/衛(wèi)星子導(dǎo)航系統(tǒng)中可觀測性矩陣的秩均為22,但不同的機動情況下各狀態(tài)量的奇異值相對大小不同。這表明慣性/衛(wèi)星子導(dǎo)航系統(tǒng)對所有狀態(tài)均具有可觀測性,但不同機動條件下各狀態(tài)量的可觀測度不同。由于本文主要關(guān)注狀態(tài)量是否是可觀測的,因此慣性/衛(wèi)星子濾波器不需進行降維。
慣性/天文子導(dǎo)航系統(tǒng)在5種機動情況下可觀測性矩陣的秩均為7,可觀測的7個狀態(tài)量包括四元數(shù)δqit以及三維矢量δΩbibc,但同樣在不同機動條件下各狀態(tài)量的可觀測度不同。由此可知,可對慣性/天文子濾波器進行降維。
2.3 降維慣性/天文子濾波器
2.3.1 狀態(tài)方程
降維慣性/天文子導(dǎo)航系統(tǒng)的狀態(tài)方程為
(32)
式中:X2∈R7×1為狀態(tài)向量,
(33)
F2∈R7×7為狀態(tài)轉(zhuǎn)移矩陣,
(34)
G2∈R7×3為噪聲驅(qū)動陣,
(35)
w2=δΩbibs為3維噪聲向量。
2.3.2 量測方程
降維后,慣性/天文子導(dǎo)航系統(tǒng)的量測方程為
(36)
式中:量測向量Z2與量測噪聲向量V2未發(fā)生變化,僅由于狀態(tài)變量變?yōu)閄2,導(dǎo)致系統(tǒng)量測矩陣由H2變?yōu)镠3,H3∈R4×7,
(37)
2.3.3 計算量對比
濾波計算量與(n3+mn2)呈正比,表2為降維前后的計算量對比。
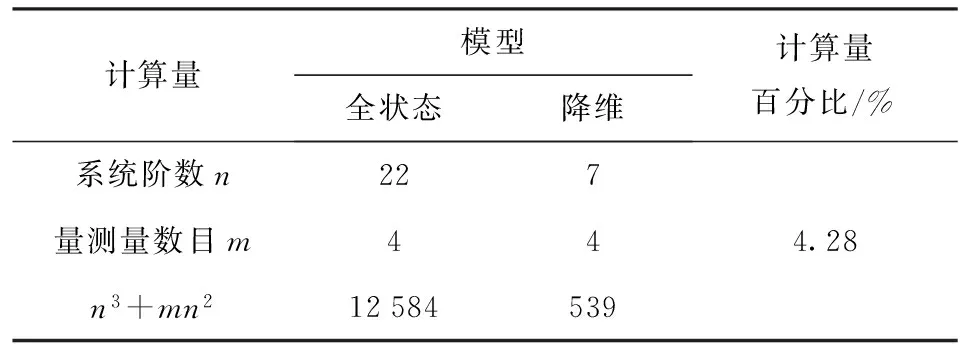
表2 慣性/天文子濾波器計算量對比
由表2可知,與文獻[6]中濾波器的計算量相比,降維后的計算量僅為其4.28%,計算量得到大量簡化。
2.4 改進聯(lián)邦濾波器設(shè)計
本文聯(lián)邦濾波器中的主濾波器采用22維全狀態(tài)變量,慣性/衛(wèi)星子導(dǎo)航系統(tǒng)中由于狀態(tài)全部可觀,因此與主濾波器保持一致,狀態(tài)方程與量測方程如1.3節(jié)、1.4節(jié)所示。慣性/天文子導(dǎo)航系統(tǒng)僅使用部分狀態(tài)變量,狀態(tài)方程與量測方程如2.3節(jié)所示。本文采用了有重置的聯(lián)邦濾波結(jié)構(gòu),利用全局估計值對對偶四元數(shù)慣導(dǎo)系統(tǒng)進行閉環(huán)反饋修正,結(jié)構(gòu)圖如圖1所示。
主濾波器全局狀態(tài)空間到慣性/衛(wèi)星子濾波器局部狀態(tài)空間的映射矩陣T1=I22,到慣性/天文子濾波器局部狀態(tài)空間的映射矩陣T2為
(38)
全局融合估計值[10]可表示為
(39)
信息分配過程為
(40)
式中:βi=12;k表示當(dāng)前時刻。
3 仿真驗證
3.1 仿真條件設(shè)置
各導(dǎo)航傳感器參數(shù)設(shè)置如表3所示,慣性導(dǎo)航解算周期為0.02 s,濾波周期為1 s,仿真時長為800 s,導(dǎo)航坐標(biāo)系為“北天東”地理坐標(biāo)系。
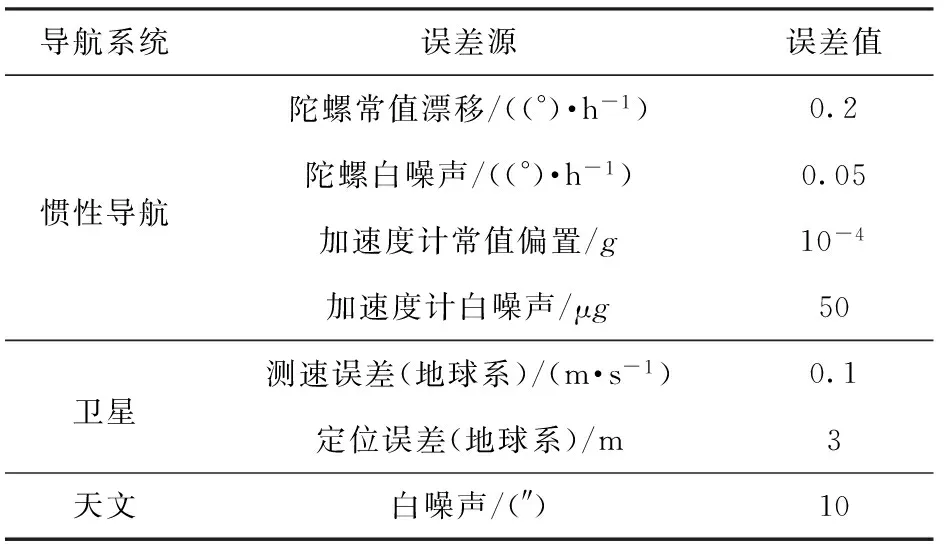
表3 傳感器參數(shù)設(shè)置
3.2 基于對偶四元數(shù)的慣性/衛(wèi)星/天文組合導(dǎo)航系統(tǒng)改進聯(lián)邦濾波仿真驗證
3.2.1 方法有效性驗證
1)動態(tài)航跡設(shè)計
為了驗證所設(shè)計的基于對偶四元數(shù)的慣性/衛(wèi)星/天文改進聯(lián)邦濾波方法性能,設(shè)計了一組姿態(tài)、速度變化的動態(tài)航跡,該航跡主要用于驗證算法的有效性。
橫滾角(°)、航向角(°)、俯仰角(°)和機頭速度vb(m/s)隨時間t的變化規(guī)律為:γ=ψ=θ=-0.000 18t2+0.18t,vb=-0.000 8t2+1.5t.
2)有效性仿真驗證
根據(jù)3.1節(jié)中的仿真設(shè)置條件,對基于對偶四元數(shù)的慣性/衛(wèi)星/天文改進聯(lián)邦濾波進行了仿真分析,導(dǎo)航誤差曲線如圖2所示。由于當(dāng)各子濾波器與主濾波器維數(shù)相同時,其全局濾波和集中式卡爾曼濾波等價[11],因此還對基于對偶四元數(shù)的慣性/衛(wèi)星/天文集中式卡爾曼濾波進行了導(dǎo)航仿真驗證,其導(dǎo)航仿真誤差曲線如圖3所示。
觀察圖2及表4中改進聯(lián)邦濾波方法的導(dǎo)航誤差統(tǒng)計可知,改進后的聯(lián)邦濾波方法可獲得高精度的導(dǎo)航信息,為飛行器提供可靠的位置、速度、姿態(tài)數(shù)據(jù)。對比圖2、圖3以及表4中改進聯(lián)邦濾波與集中式卡爾曼濾波導(dǎo)航誤差的統(tǒng)計數(shù)據(jù)可以發(fā)現(xiàn),改進聯(lián)邦濾波的精度略低于集中式卡爾曼濾波,但是差別很小,誤差位于同一數(shù)量級。這是由于改進聯(lián)邦濾波中慣性/天文子濾波器維數(shù)與主濾波器不一致,因此損失了部分信息,屬于次優(yōu)濾波[11]。但是從表2中的計算量對比可知,改進聯(lián)邦濾波方法的計算量得到大量的簡化,鑒于改進后聯(lián)邦濾波器的實時性優(yōu)勢,較小的精度損失是可以承受的。
傳統(tǒng)的慣性/衛(wèi)星/天文聯(lián)邦濾波將地理系位置、地理系速度、地理系下定義的平臺誤差角、加速度計誤差和陀螺誤差作為狀態(tài)量,且慣性/衛(wèi)星與慣性/天文子濾波器狀態(tài)方程保持一致。本文中基于對偶四元數(shù)的降維慣性/天文子濾波器直接利用天文信息進行組合,不需要將其轉(zhuǎn)化到地理系。由于在衛(wèi)星導(dǎo)航系統(tǒng)完好的情況下,慣性導(dǎo)航位置誤差較小,基于對偶四元數(shù)的降維慣性/天文組合優(yōu)勢不明顯。為體現(xiàn)本文中慣性/天文組合方法的優(yōu)勢,考慮衛(wèi)星導(dǎo)航系統(tǒng)由于故障等原因已進行隔離,僅余慣性/天文子濾波器的情況。在3.1節(jié)的仿真條件下,將基于對偶四元數(shù)的降維慣性/天文組合導(dǎo)航方法與傳統(tǒng)慣性/天文組合導(dǎo)航方法進行對比,導(dǎo)航誤差對比曲線如圖4所示,陀螺常值漂移估計曲線如圖5、圖6所示。
圖4中虛線表示傳統(tǒng)慣性/天文組合導(dǎo)航誤差,實線表示基于對偶四元數(shù)的降維慣性/天文組合導(dǎo)航誤差。從表5可知,傳統(tǒng)慣性/天文組合模式姿態(tài)精度優(yōu)于純慣性導(dǎo)航,但是速度和位置精度卻較低。這是由于在傳統(tǒng)慣性/天文組合模式中位置誤差、速度誤差、加速度計誤差均作為狀態(tài)量進行卡爾曼濾波估計,但這些狀態(tài)量可觀測性較低或不具有可觀測性,將這些狀態(tài)量反饋并進行慣性導(dǎo)航誤差修正,反而可能會降低慣性導(dǎo)航位置、速度精度。基于對偶四元數(shù)的降維慣性/天文組合相比于純慣性導(dǎo)航在姿態(tài)、速度、位置(三維矢量和)上均有所提升。該組合模式中僅包含可觀的狀態(tài)量,且直接與天文姿態(tài)進行組合,因而具有較好的姿態(tài)精度,從而獲得了更好的位置和速度精度,具有更優(yōu)的導(dǎo)航性能,但是由于位置、速度誤差缺少修正,因此位置和速度仍呈發(fā)散趨勢。
表4 基于對偶四元數(shù)的慣性/衛(wèi)星/天文導(dǎo)航誤差均方根值統(tǒng)計(有效性驗證)
Tab.4 RMS statistics of navigation errors of SINS/GNSS/CNS based on dual quaternions (effectiveness simulation)
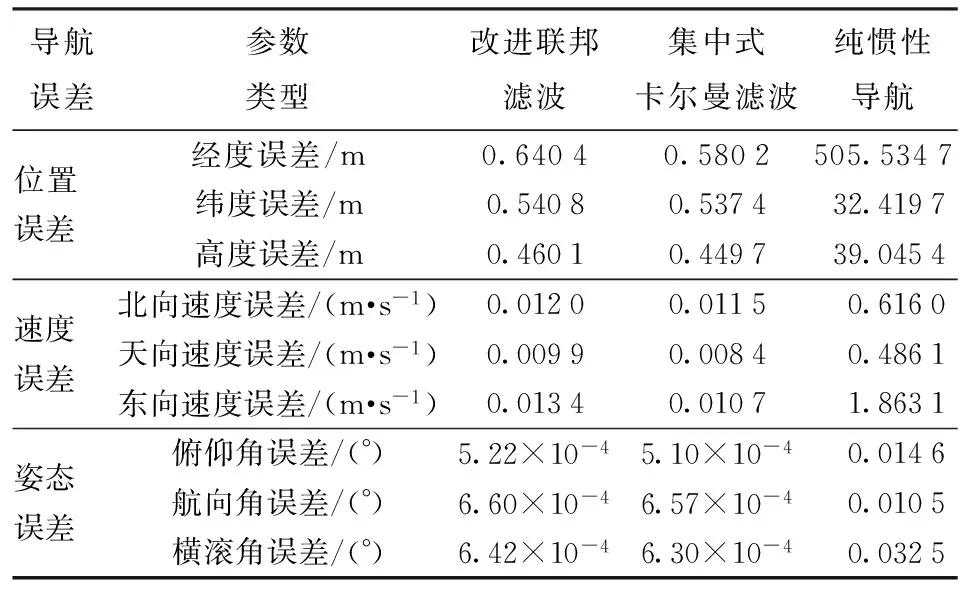
導(dǎo)航誤差參數(shù)類型改進聯(lián)邦濾波集中式卡爾曼濾波純慣性導(dǎo)航位置經(jīng)度誤差/m0.64040.5802505.5347誤差緯度誤差/m0.54080.537432.4197高度誤差/m0.46010.449739.0454速度北向速度誤差/(m·s-1)0.01200.01150.6160誤差天向速度誤差/(m·s-1)0.00990.00840.4861東向速度誤差/(m·s-1)0.01340.01071.8631姿態(tài)俯仰角誤差/(°)5.22×10-45.10×10-40.0146誤差航向角誤差/(°)6.60×10-46.57×10-40.0105橫滾角誤差/(°)6.42×10-46.30×10-40.0325
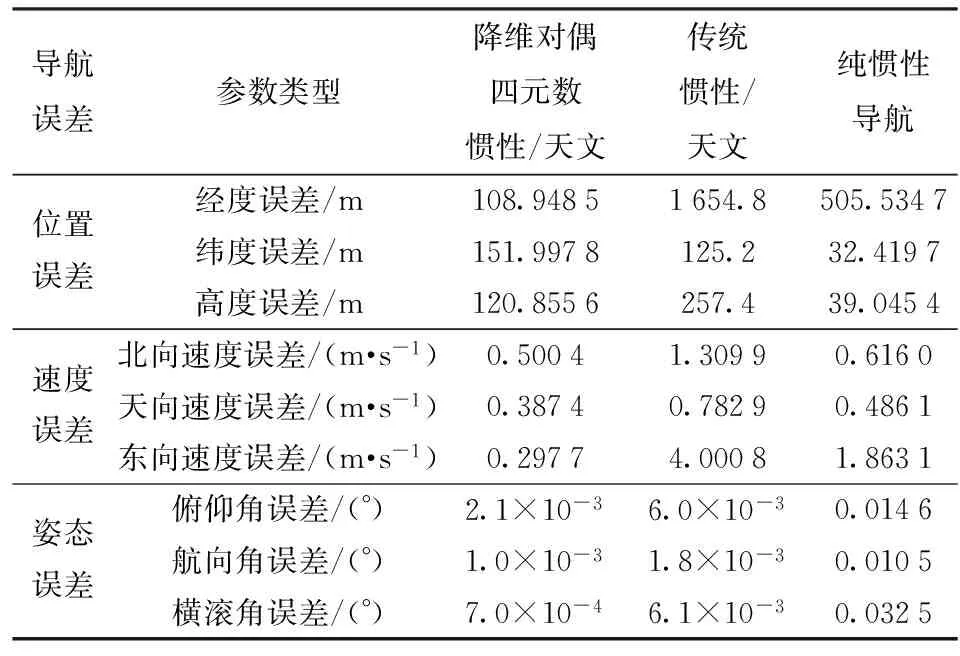
表5 慣性/天文導(dǎo)航誤差均方根值統(tǒng)計(有效性驗證)
觀察圖4以及對比表5中的誤差統(tǒng)計數(shù)據(jù),可以發(fā)現(xiàn)基于對偶四元數(shù)的降維慣性/天文組合相比于傳統(tǒng)慣性/天文組合具有更高的姿態(tài)精度。對比圖5、圖6可知,對偶四元數(shù)慣性/天文組合模式具有更高的陀螺常值漂移估計精度。這是由于傳統(tǒng)慣性/天文組合模式在將天文信息進行坐標(biāo)轉(zhuǎn)換時引入了慣性導(dǎo)航位置誤差,隨著慣性導(dǎo)航位置的發(fā)散,使得高精度的天文信息受損,天文量測信息對陀螺常值漂移的估計效果隨著時間的增長逐步減弱。當(dāng)慣性導(dǎo)航位置誤差較大時,天文精度會大大降低,且由于這種天文信息精度變化導(dǎo)致量測噪聲難以設(shè)置,會進一步降低濾波精度。相比于傳統(tǒng)慣性/天文在地理系下進行姿態(tài)組合,對偶四元數(shù)慣性/天文實際采用了慣性系姿態(tài)組合模式,直接有效地使用高精度天文姿態(tài)量測信息,獲得了較高的陀螺漂移估計和慣性系姿態(tài)誤差估計精度。雖然在最終獲取地理系姿態(tài)的過程中,仍然需要使用慣性導(dǎo)航位置,但是由于準(zhǔn)確地對陀螺漂移進行了估計并有效修正陀螺輸出,因此可以明顯地提高組合精度。
3.2.2 方法應(yīng)用性驗證
1)空天飛行器航跡設(shè)計
考慮到慣性/衛(wèi)星/天文組合導(dǎo)航的使用環(huán)境,為了進一步證明算法的應(yīng)用性,本文以空天飛行器為載體對象,利用在軌段飛行航跡進行仿真測試,具體航跡參數(shù)設(shè)置如表6所示,軌道航跡如圖7所示。

表6 空天飛行器在軌段航跡設(shè)置
2)應(yīng)用性仿真驗證
按照3.1節(jié)中的仿真設(shè)置條件進行仿真測試,得到基于對偶四元數(shù)的慣性/衛(wèi)星/天文導(dǎo)航誤差統(tǒng)計值,如表7所示。在衛(wèi)星失效情況下,慣性/天文導(dǎo)航誤差如表8所示。
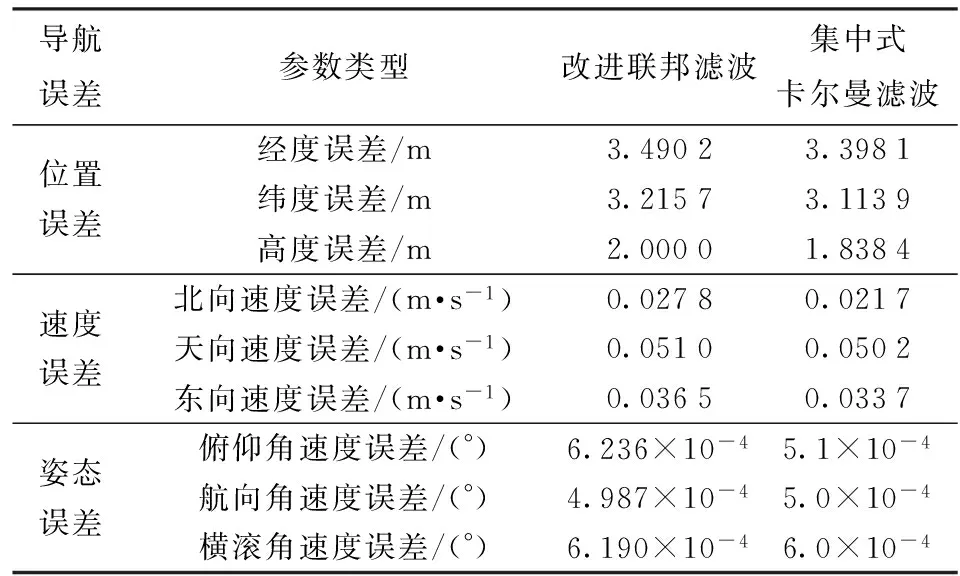
表7 基于對偶四元數(shù)的慣性/衛(wèi)星/天文導(dǎo)航誤差均方根值統(tǒng)計(應(yīng)用性驗證)
對比表7中的誤差統(tǒng)計數(shù)據(jù)可知,空天飛行器在軌飛行運動過程中,基于對偶四元數(shù)的改進聯(lián)邦濾波方法與集中式卡爾曼濾波具有基本一致的精度。通過表8可知,在衛(wèi)星失效的情況下,基于對偶四元數(shù)的降維慣性/天文組合相比于傳統(tǒng)慣性/天文組合具有更高的姿態(tài)、速度、位置(三維矢量和)精度。
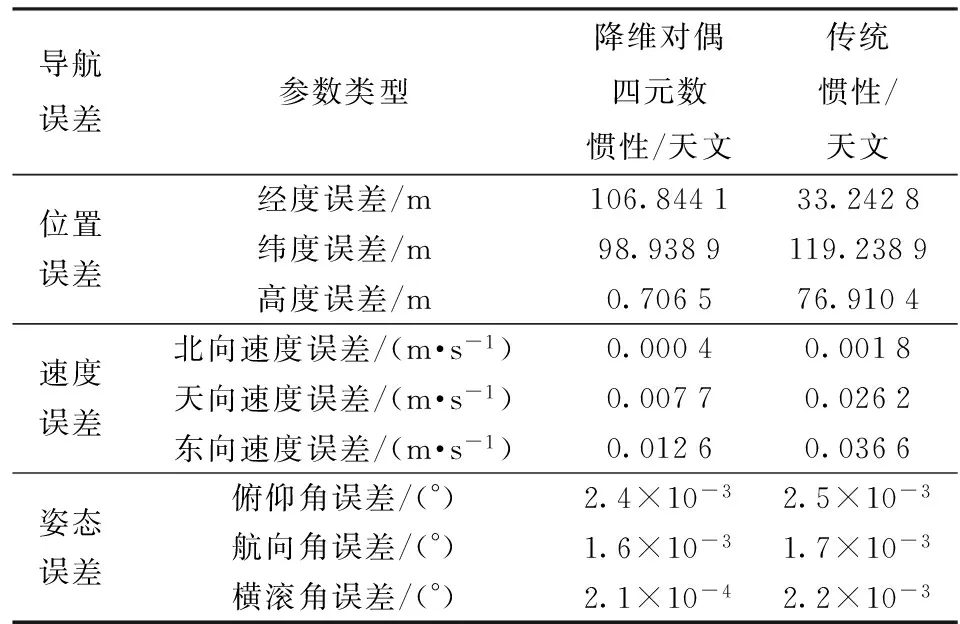
表8 慣性/天文導(dǎo)航誤差均方根值統(tǒng)計(應(yīng)用性驗證)
綜上所述,本文所提出的基于對偶四元數(shù)的慣性/衛(wèi)星/天文改進聯(lián)邦濾波算法可以在保證導(dǎo)航精度的同時減少計算量,且能在衛(wèi)星故障或信號丟失的情況下獲得相較于傳統(tǒng)慣性/天文更高的導(dǎo)航精度。
4 結(jié)論
傳統(tǒng)地理系下慣性/衛(wèi)星/天文組合導(dǎo)航系統(tǒng)聯(lián)邦濾波中主濾波和子濾波器中均保留所有狀態(tài)量,而實際天文信息對部分狀態(tài)量不具有可觀測性。傳統(tǒng)慣性/天文在組合前需先將天文姿態(tài)信息轉(zhuǎn)化為地理系姿態(tài),由于估計回路中引入慣性導(dǎo)航位置誤差,因此狀態(tài)量估計精度逐步降低。針對上述問題,本文提出基于對偶四元數(shù)的慣性/衛(wèi)星/天文改進聯(lián)邦濾波方法,根據(jù)狀態(tài)量的可觀測性建立子濾波器模型,降低子濾波器維數(shù)。基于對偶四元數(shù)的慣性/天文組合模式采用慣性系姿態(tài)組合的方法,直接利用天文信息對陀螺誤差和慣性系姿態(tài)誤差進行準(zhǔn)確估計,相比于傳統(tǒng)慣性/天文組合模式具有更好的導(dǎo)航性能。仿真結(jié)果表明,本文所提出的方法能在減少聯(lián)邦濾波計算量的同時獲得與集中濾波相當(dāng)?shù)木龋l(wèi)星信號丟失情況下相比于傳統(tǒng)慣性/天文組合精度更高,從而為慣性/衛(wèi)星/天文組合模式提供了一種新的有效方法,具有較高的工程應(yīng)用參考價值。
)
[1] Yang Y Q, Zhang C X, Lu J Z. Local observability analysis of star sensor installation errors in a SINS/CNS integration system for near-earth flight vehicles [J]. Sensors, 2017, 17(1):167.
[2] Deng H, LIU G B, Ehen Hao M, et al. The application of federated Kalman filtering in SINS/GPS/CNS integrated navigation system[J]. International Journal of Wireless and Microwave Technologies, 2012, 2(2): 12-19.
[3] 全偉, 劉百奇, 宮曉琳,等. 慣性/天文/衛(wèi)星組合導(dǎo)航技術(shù)[M]. 北京:國防工業(yè)出版社, 2011:6-7.
QUAN Wei, LIU Bai-qi, GONG Xiao-lin, et al. INS/CNS/GNSS integrated navigation technology[M]. Beijing: National Defense Industry Press, 2011:6-7. (in Chinese)
[4] 張科, 劉海鵬, 李恒年,等. SINS/GPS/CNS 組合導(dǎo)航聯(lián)邦濾波算法[J]. 中國慣性技術(shù)學(xué)報, 2013, 21(2):226-230.
ZHANG Ke, LIU Hai-peng,LI Heng-nian,et al. SINS/GPS/CNS integrated navigation federal filtering algorithm[J]. Journal of Chinese Inertial Technology, 2013, 21(2):226-230. (in Chinese)
[5] 趙慧, 熊智, 施麗娟,等. 基于慣性系下陀螺誤差在線估計修正的慣性與星光組合導(dǎo)航方法[J]. 兵工學(xué)報, 2016, 37(12):2259-2267.
ZHAO Hui, XIONG Zhi, SHI Li-juan, et al. A SINS/STAR integrated navigation method based on online estimation of gyroscope error in inertial coordinate[J]. Acta Armamentarii, 2016, 37(12):2259-2267. (in Chinese)
[6] 錢華明, 孫龍, 黃蔚, 等. 基于加性對偶四元數(shù)的慣性/天文組合導(dǎo)航算法[J]. 北京航空航天大學(xué)學(xué)報, 2013, 39(6): 739-744.
QIAN Hua-ming, SUN Long,HUANG Wei,et al. SINS/CNS integrated navigation algorithms based on dual quaternion[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(6): 739-744. (in Chinese)
[7] 武元新. 對偶四元數(shù)導(dǎo)航算法與非線性高斯濾波研究[D]. 長沙:國防科學(xué)技術(shù)大學(xué), 2005:24-35.
WU Yuan-xin. Research on dual-quaternion navigation algorithm and nonlinear Gaussian filtering[D].Changsha: National University of Defense Technology, 2005:24-35. (in Chinese)
[8] Wang R Y, Liu W C, Bian H W, et al. Fast alignment algorithm with order-reduced filter for SINS[J]. Journal of Chinese Inertial Technology, 2016, 24(5):607-618.
[9] 朱蘭偉, 張燕, 蔡春龍. 基于可觀測性分析的光纖陀螺SINS/測速儀組合系統(tǒng)技術(shù)[J]. 中國慣性技術(shù)學(xué)報, 2011, 19(1):50-54.
ZHU Lan-wei, ZHANG Yan, CAI Chun-long. FOG SINS/speedometer integrated system technique based on observability analysis[J]. Journal of Chinese Inertial Technology, 2011, 19(1):50-54. (in Chinese)
[10] 衣曉, 何友, 關(guān)欣. 基于不同局部模型的聯(lián)合濾波算法研究[J]. 中國慣性技術(shù)學(xué)報, 2002, 10(5):16-19.
YI Xiao, HE You, GUAN Xin. Federated filtering algorithm based on different local models[J]. Journal of Chinese Inertial Technology, 2002, 10(5):16-19. (in Chinese)
[11] Gu Q T, Fang J. Global optimality for generalized federated filter[J]. Acta Automatica Sinica, 2009, 35(10):1310-1316.