基于滑模魯棒算法的超低頻主動(dòng)隔振系統(tǒng)?
2018-03-18 16:40:12羅東云程冰周寅吳彬王肖隆林強(qiáng)
物理學(xué)報(bào) 2018年2期
羅東云 程冰 周寅 吳彬 王肖隆 林強(qiáng)
(浙江工業(yè)大學(xué)理學(xué)院,光學(xué)與光電子研究中心,生物與醫(yī)學(xué)物理信息技術(shù)協(xié)同創(chuàng)新中心,杭州 310023)
1 引 言
重力加速度的高精度測量具有重要的科學(xué)意義和實(shí)用價(jià)值.高精度重力加速度測量儀器可以用于地球物理研究、礦產(chǎn)資源勘探、環(huán)境監(jiān)測、油氣普查、地質(zhì)調(diào)查等領(lǐng)域,應(yīng)用前景非常廣闊[1?3].冷原子干涉型重力儀具有高精度和長時(shí)間連續(xù)穩(wěn)定測量的優(yōu)點(diǎn),是近年來興起的一種新型高精度絕對重力儀[4?7].目前冷原子干涉型重力儀的靈敏度已經(jīng)達(dá)到4.2×10?9g·Hz?1/2,在100 s的積分時(shí)間內(nèi)重力加速度測量分辨率可以優(yōu)于0.5μg[8].
拉曼激光反射鏡的振動(dòng)對冷原子重力儀的測量精度有很大的影響.高頻振動(dòng)可以用被動(dòng)隔振平臺(tái)加以隔離.但對低頻振動(dòng)而言,被動(dòng)隔振平臺(tái)不起作用或作用很小.因此,超低頻隔振技術(shù)在冷原子重力儀的測量中十分重要[9?11].譬如,對于總高度為1 m的原子干涉儀,原子干涉區(qū)距離一般約為20 cm,原子團(tuán)從制備完成到探測位置的總下落時(shí)間約為200 ms.在下落時(shí)間內(nèi)需要對原子的內(nèi)態(tài)、動(dòng)能進(jìn)行控制并對原子施加拉曼光脈沖,置于原子重力儀底部的拉曼光反射鏡的機(jī)械振動(dòng)幅度應(yīng)遠(yuǎn)小于拉曼光波長,否則頻率為0.1—10.0 Hz的振動(dòng)會(huì)使拉曼光的相位混亂,原子干涉信號(hào)將會(huì)被淹沒在噪聲中.斯坦福大學(xué)朱棣文課題組首次將主動(dòng)隔振技術(shù)運(yùn)用于原子干涉儀領(lǐng)域,其研制的主動(dòng)隔振系統(tǒng)能將0.1—20.0 Hz的振動(dòng)噪聲壓制為原始值的1/300,但是隔振系統(tǒng)體積龐大[12].Freier[13]開發(fā)了一個(gè)結(jié)構(gòu)更加簡單的主動(dòng)隔振系統(tǒng),能將0.03—5.00 Hz的振動(dòng)降低至原始值的1/200.Tang等[14]在Freier的基礎(chǔ)上精簡了主動(dòng)隔振系統(tǒng)的機(jī)械結(jié)構(gòu),在0.1—3.0 Hz頻率范圍內(nèi)可以抑制99%的振動(dòng).Zhou等[15]使用三維隔振技術(shù),將0.2—2.0 Hz的振動(dòng)噪聲壓縮了98%,系統(tǒng)自振頻率可以達(dá)到0.01 Hz.以上主動(dòng)隔振技術(shù)都采用了超前滯后補(bǔ)償濾波的控制方法.這種方法需要將較多的滯后濾波器串聯(lián)以達(dá)到較高的開環(huán)增益和系統(tǒng)穩(wěn)定的效果,而且需要整定的參數(shù)比較多.Freier[13]使用了3組滯后補(bǔ)償濾波器,每組濾波器需要整定3個(gè)參數(shù),包含1個(gè)增益系數(shù)和2個(gè)截止頻率,而且在不同時(shí)間段的測量還可能需要對參數(shù)進(jìn)行微調(diào),整個(gè)控制器需要整定的參數(shù)達(dá)到9個(gè),這樣會(huì)給控制器的設(shè)計(jì)帶來困難,并影響最后的隔振效果.
不同于以往的主動(dòng)隔振系統(tǒng),本文采用滑模魯棒控制方法設(shè)計(jì)主動(dòng)隔振系統(tǒng),以解決冷原子重力儀中的拉曼反射鏡振動(dòng)問題.通過建立拉曼反射鏡的振動(dòng)數(shù)學(xué)模型,針對模型利用滑模魯棒控制算法進(jìn)行控制仿真.在此基礎(chǔ)上設(shè)計(jì)隔振機(jī)械結(jié)構(gòu)并構(gòu)建實(shí)驗(yàn)平臺(tái),采用滑模魯棒控制算法進(jìn)行主動(dòng)隔振實(shí)驗(yàn).實(shí)驗(yàn)結(jié)果表明,與被動(dòng)隔振平臺(tái)隔振效果相比,構(gòu)建的平臺(tái)在0.1—10.0 Hz頻段的殘余振動(dòng)噪聲功率譜密度最大降低了99.9%;與在該平臺(tái)上采用超前滯后補(bǔ)償控制算法相比,殘余振動(dòng)噪聲功率譜密度降低了83.3%,而且需要整定的參數(shù)只有3個(gè).實(shí)驗(yàn)結(jié)果表明,滑模魯棒控制主動(dòng)隔振系統(tǒng)在控制效果上優(yōu)于超前滯后補(bǔ)償控制算法,而且整定參數(shù)少,響應(yīng)快速,對參數(shù)變化及擾動(dòng)不靈敏.
2 振動(dòng)噪聲對冷原子重力儀的影響
冷原子重力儀測定重力加速度的實(shí)驗(yàn)過程包括原子的冷卻囚禁、選態(tài)、自由下落、原子干涉以及末態(tài)測量等步驟.若原子團(tuán)相對于反射鏡在豎直方向的位置為r[16],則拉曼光在原子團(tuán)處的相位為

式中keff為拉曼光有效波矢.由此可見冷原子重力儀相位會(huì)受到反射鏡位置變化的影響.為了使重力加速度測量更加準(zhǔn)確,需要對反射鏡進(jìn)行振動(dòng)隔離,相位的功率譜密度可以表示為

式中ω為振動(dòng)的角頻率,Sa(ω)為加速度的噪聲功率譜.為冷原子干涉相位的方差,可以表示為



從(5)式可以看出,傳遞函數(shù)體現(xiàn)了原子干涉對不同振動(dòng)頻率的敏感程度.圖1的計(jì)算中T=70 ms.從圖1可以看出0.1—10.0 Hz的振動(dòng)噪聲對干涉儀影響最大.為了達(dá)到更高精度的測量靈敏度,必須對0.1—10.0 Hz頻段的振動(dòng)噪聲加以抑制.
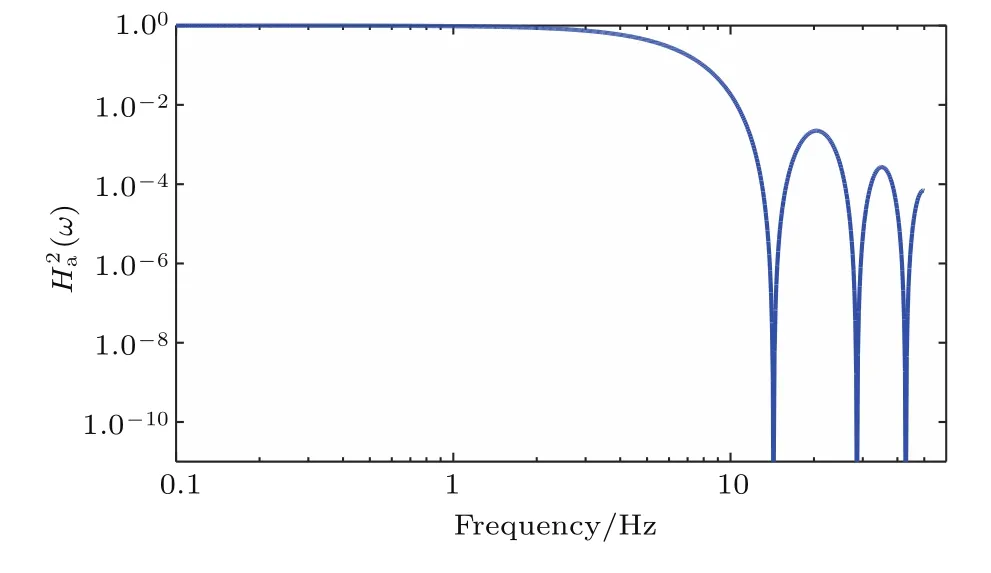
圖1 振動(dòng)噪聲對重力儀的傳遞函數(shù)Fig.1.Transfer function of vibration and noise on the gravimeter.
3 隔振平臺(tái)模型與控制算法設(shè)計(jì)
3.1 隔振平臺(tái)模型
主動(dòng)隔振系統(tǒng)的簡化力學(xué)模型如圖2所示.圖中m為需要隔振的拉曼光反射鏡以及支撐桿等負(fù)載的總質(zhì)量,地面的振動(dòng)通過阻尼c和彈簧傳遞給拉曼反射鏡迫使鏡子振動(dòng),彈簧的彈性系數(shù)為k,作動(dòng)器會(huì)產(chǎn)生一個(gè)與鏡子振動(dòng)方向相反的力F來抵消其運(yùn)動(dòng)[17?20].由于原子重力儀只對地面振動(dòng)的豎直方向敏感,所以主要研究豎直方向的隔振,x為地面振動(dòng)的豎直方向位移,y為地面振動(dòng)通過被動(dòng)隔振平臺(tái)傳遞給負(fù)載引起的位移.圖2所示主動(dòng)隔振模型是在有阻尼簡諧振動(dòng)模型中加入了抵消振動(dòng)的作動(dòng)器,其運(yùn)動(dòng)方程可以表示為

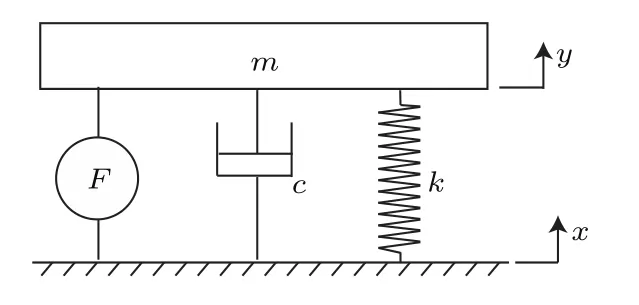
圖2 彈簧振子主動(dòng)隔振示意圖Fig.2.Schematic of spring oscillator based active vibration isolator.
整個(gè)實(shí)驗(yàn)系統(tǒng)的反饋回路如圖3所示.用一個(gè)被動(dòng)隔振平臺(tái)作為初級(jí)預(yù)隔振,隔離地面振動(dòng)高于10 Hz的噪聲信號(hào),用地震儀實(shí)時(shí)測量被動(dòng)隔振平臺(tái)隔振面板的殘余振動(dòng)噪聲,輸出與振動(dòng)速度大小成比例的差分電壓信號(hào),經(jīng)過放大、濾波后通過滑模控制器.滑模控制也稱為變結(jié)構(gòu)控制,其控制策略與其他控制的不同之處在于可以根據(jù)系統(tǒng)當(dāng)前的狀態(tài)有目的地變化,迫使系統(tǒng)按照預(yù)定滑動(dòng)模態(tài)的狀態(tài)軌跡運(yùn)動(dòng).由于滑動(dòng)模態(tài)可以進(jìn)行設(shè)計(jì)而且與對象參數(shù)及擾動(dòng)無關(guān),這使得滑模控制具有響應(yīng)快、對參數(shù)變化及擾動(dòng)不靈敏等優(yōu)點(diǎn).滑模控制器的輸出信號(hào)再通過電壓控制電流源(VCCS),將電壓信號(hào)轉(zhuǎn)換為對應(yīng)頻率的電流,電流信號(hào)通入音圈電機(jī)產(chǎn)生與電流成正比的電磁反饋力.該反饋力與地面振動(dòng)產(chǎn)生的力大小相等,方向相反,能夠互相抵消,從而使拉曼反射鏡所在的被動(dòng)隔振平臺(tái)的彈簧處于平衡位置,保持靜止?fàn)顟B(tài)[23,24].
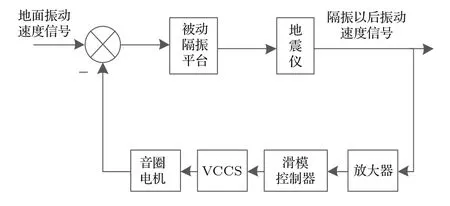
圖3 反饋環(huán)路Fig.3.Feedback loop.
3.2 控制器設(shè)計(jì)
控制器輸出的電壓信號(hào)經(jīng)過VCCS變成電流信號(hào),其頻率響應(yīng)是平坦的,增益系數(shù)為KVC,電流經(jīng)過音圈電機(jī)變成力F,音圈電機(jī)的輸入電流與輸出電磁力成比例,系數(shù)為YVC,運(yùn)動(dòng)方程(6)式可以改寫為

式中u為控制器輸出電壓.設(shè)2?0ω0=a,KVCYVC/m=b,,(7)式變?yōu)?/p>

(8)式中拉曼鏡的振動(dòng)信號(hào)用電壓形式表示為
式中c1>0,xd=0為拉曼鏡振動(dòng)的位移的設(shè)定值,為其速度的設(shè)定值.滑模函數(shù)的導(dǎo)數(shù)為
采用指數(shù)趨近律,有

則滑模控制律為
由于符號(hào)函數(shù)sgn(s)很容易產(chǎn)生抖振,可以用飽和函數(shù)sat(s)代替(12)式理想滑動(dòng)模態(tài)中的符號(hào)函數(shù).sat(s)表達(dá)式為
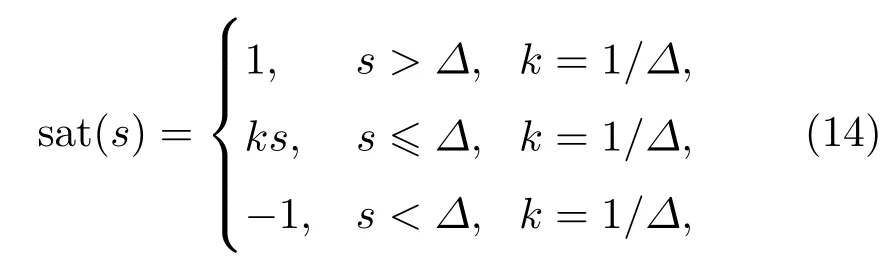
式中Δ為邊界層.飽和函數(shù)的本質(zhì)為在邊界層外采用切換控制,在邊界層內(nèi)采用線性化反饋控制[25?27].dc的表達(dá)式為

式中dl,du分別為估計(jì)的地面振動(dòng)位移的最小值和最大值.
3.3 仿真算例
根據(jù)建立的主動(dòng)隔振平臺(tái)模型和滑模魯棒控制方法,利用MATLAB進(jìn)行系統(tǒng)仿真驗(yàn)證,系統(tǒng)參數(shù)如表1所示.
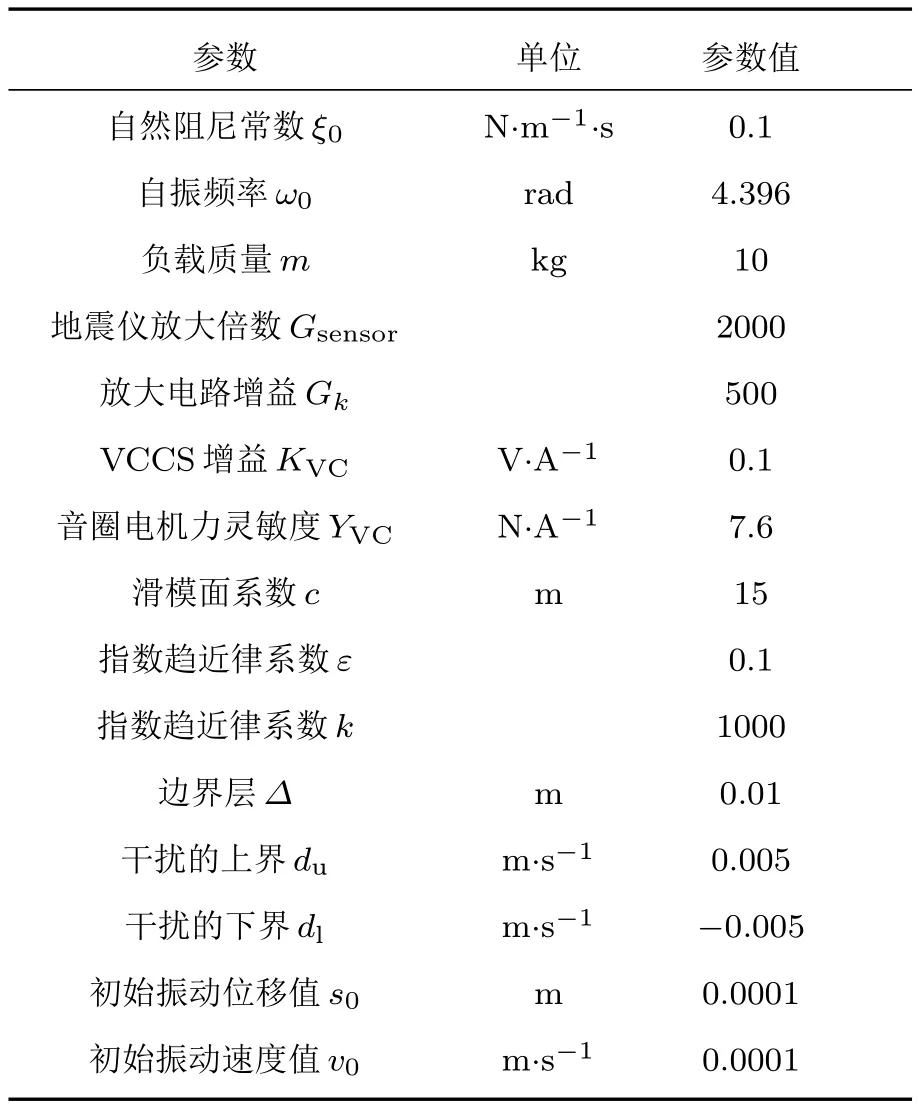
表1 算例系統(tǒng)仿真參數(shù)Table 1.Parameters of simulation example.
選取地面振動(dòng)位移輸入干擾信號(hào)的頻率值為0.2 Hz,也可以在0.1—10.0 Hz范圍內(nèi)取值,幅值為1×10?4m.滑模魯棒控制器表達(dá)式為(14)式,其中需要整定的參數(shù)為滑模面系數(shù)c、指數(shù)趨近律系數(shù)ε和指數(shù)趨近律系數(shù)k.主動(dòng)隔振效果如圖4所示,從圖中可以看出隔振效果十分明顯.算例表明,基于滑模魯棒控制算法的主動(dòng)隔振方法是可行的.
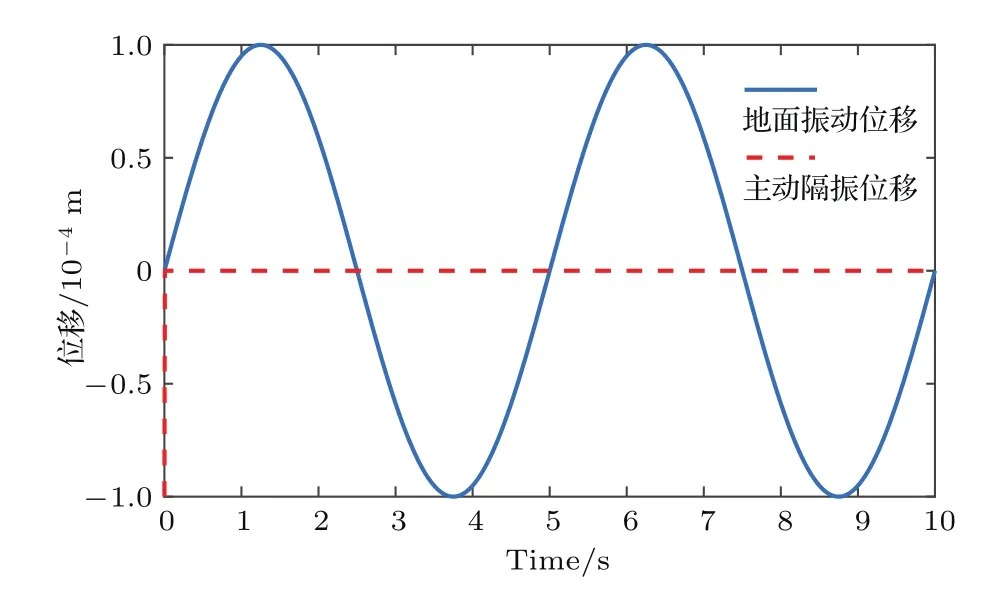
圖4 滑模魯棒控制主動(dòng)隔振仿真效果Fig.4.Simulation result of active vibration isolation based on sliding-mode robust control.
4 實(shí)驗(yàn)驗(yàn)證
4.1 機(jī)械設(shè)計(jì)
主動(dòng)隔振機(jī)械裝置如圖5所示,被動(dòng)隔振平臺(tái)自振頻率設(shè)置為0.8,地震儀用來檢測拉曼鏡的振動(dòng)速度.音圈電機(jī)適合微幅低頻的場合,因此選擇音圈電機(jī)作為作動(dòng)器.由于音圈電機(jī)的線圈部分與永磁體部分的間隙只有0.38 mm,而且兩部分相互獨(dú)立[28],所以用一個(gè)二維移動(dòng)平臺(tái)來調(diào)節(jié)兩部分的間隙,使之在運(yùn)動(dòng)過程中不發(fā)生摩擦.平臺(tái)上的平衡塊是為了使隔振面板保持水平,因?yàn)樗蕉葧?huì)直接影響隔振效果[29].

圖5 主動(dòng)隔振機(jī)械裝置Fig.5.Mechanical setup of active vibration isolation.
4.2 實(shí)驗(yàn)結(jié)果與分析
地震儀輸出的殘余振動(dòng)噪聲電壓信號(hào)輸入與電腦相連的振動(dòng)數(shù)據(jù)采集模塊,實(shí)時(shí)采集和存儲(chǔ)振動(dòng)信號(hào),然后用電腦分析振動(dòng)的噪聲功率譜,用以評(píng)價(jià)隔振效果.采用滑模魯棒控制方法對實(shí)驗(yàn)結(jié)果進(jìn)行分析,并與傳統(tǒng)的控制方式進(jìn)行比較,具體實(shí)驗(yàn)結(jié)果如圖6所示.圖中紅色線為采用被動(dòng)隔振平臺(tái)后的殘余振動(dòng)噪聲功率譜,藍(lán)色線為采用超前滯后補(bǔ)償控制的殘余振動(dòng)噪聲功率譜,黑色線為采用滑模魯棒控制后的殘余振動(dòng)噪聲功率譜.與被動(dòng)隔振平臺(tái)相比,系統(tǒng)在共振頻率點(diǎn)0.8 Hz能達(dá)到99.9%的振動(dòng)抑制水平,在0.4—0.6 Hz范圍內(nèi)能達(dá)到98%的振動(dòng)抑制水平,在2—3 Hz范圍內(nèi)能達(dá)到90%的振動(dòng)抑制水平,與超前滯后補(bǔ)償控制算法相比,滑模魯棒控制具有更好的振動(dòng)噪聲抑制水平.
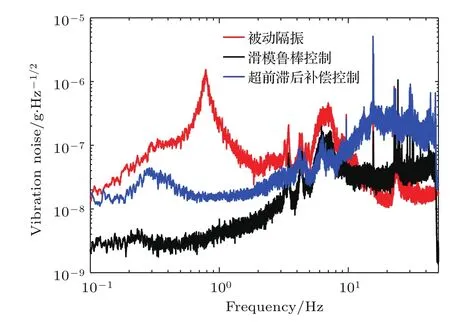
圖6 三種隔振方法的殘余振動(dòng)噪聲功率譜密度對比Fig.6.Comparison of residual vibration noise power spectral density obtained by three different vibration isolation methods.
可以用(3)式來評(píng)估圖6中主動(dòng)隔振后殘余振動(dòng)噪聲對原子重力儀相位的影響,不同振動(dòng)頻段對干涉儀相位的影響如圖7所示.從圖7可以看出滑模魯棒控制主動(dòng)隔振在0.1—10 Hz頻率范圍內(nèi)對原子重力儀相位影響最小,在該頻段積分以后,其對相位的影響為被動(dòng)隔振對相位影響的14.7%,與超前滯后補(bǔ)償控制相比相位影響降低了40.2%.
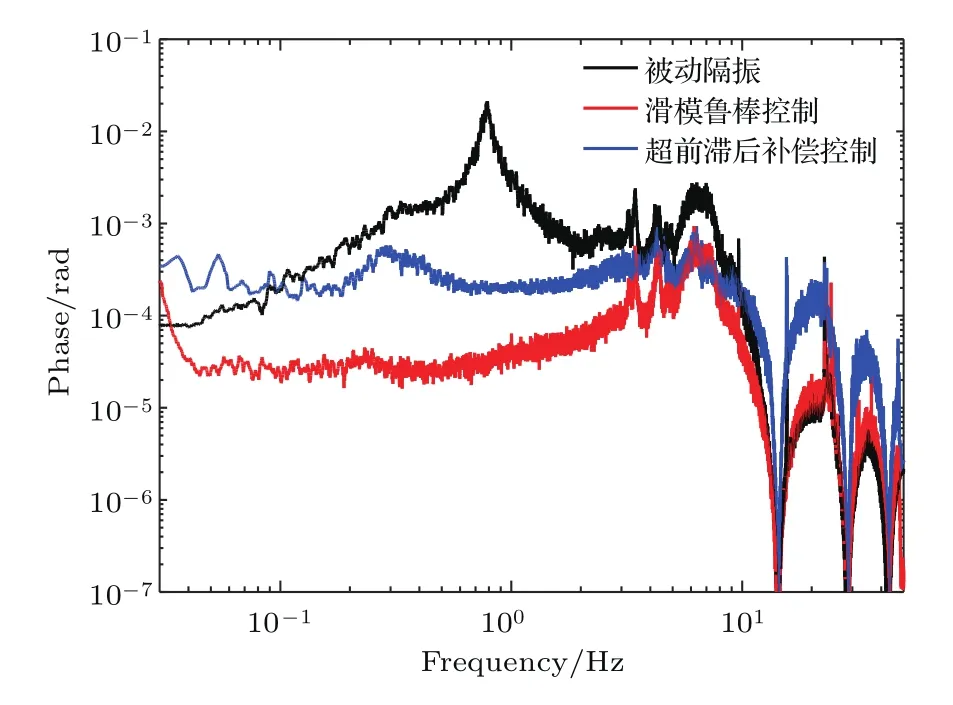
圖7 三種隔振方法的振動(dòng)噪聲對干涉相位的影響Fig.7.Influence of vibration noise on the interference phase obtained by three different vibration isolation methods.
5 結(jié) 論
針對原子重力儀中拉曼鏡的隔振需求,設(shè)計(jì)并研制了一套基于滑模魯棒控制算法的主動(dòng)隔振系統(tǒng).通過建立隔振系統(tǒng)結(jié)構(gòu)力學(xué)模型,設(shè)計(jì)針對該模型的滑模魯棒控制算法,用MATLAB進(jìn)行模擬仿真,結(jié)果表明該算法可以運(yùn)用于主動(dòng)隔振系統(tǒng)中.設(shè)計(jì)主動(dòng)隔振機(jī)械結(jié)構(gòu)和反饋回路等相關(guān)實(shí)驗(yàn)?zāi)K,用LabVIEW軟件實(shí)現(xiàn)滑模魯棒控制,經(jīng)過該實(shí)驗(yàn)平臺(tái)測試,在0.1—10 Hz振動(dòng)頻率范圍內(nèi),振動(dòng)噪聲功率譜可在被動(dòng)隔振的基礎(chǔ)上得到進(jìn)一步有效壓縮,減小振動(dòng)對原子干涉儀相位的影響,與超前滯后補(bǔ)償控制相比隔振效果更好.
[1]Kasevich M,Chu S 1991Phys.Rev.Lett.B67 181
[2]Kasevich M,Chu S 1992Appl.Phys.B54 321
[3]Borde C J 1989Phys.Lett.A140 10
[4]Keith D W,Ekstrom C R,Turchette Q A,Pritchard D E,Kasapi S 1991Phys.Rev.Lett.66 2693
[5]Clauser J F 1988Physica B151 262
[6]Kasevich M,Weiss D S,Riis E,Moler K,Kasapi S,Chu S 1991Phys.Rev.Lett.66 2297
[7]Carnal O,Mlynek J 1991Phys.Rev.Lett.66 2689
[8]Hu Z K,Sun B L,Duan X C,Zhou M K,Chen L L,Zhan S,Zhang Q Z,Luo J 2013Phys.Rev.A88 43610
[9]Hauth M,Freier C,Schkolnik M,Schkolnik V,Senger A,Schmidt M,Peters A 2013Appl.Phys.B113 49
[10]Jacquey M,Miffre A,Buchner M,Trenec G,Vigue J 2006Appl.Phys.B84 617
[11]Zhou L,Xiong Z Y,Wang Y,Tang B,Peng W C,Hao K,Li R B,Liu M,Wang J 2011Gen.Relat.Gravit43 1931
[12]Hensley J M,Peters A,Chu S 1999Rev.Sci.Instrum.70 2735
[13]Frier C 2010Ph.D.Dissertation(Hamburg:Universit?t Hamburg)
[14]Tang B,Zhou L,Wang Y H,Xiong Z Y,Xiong Z Y,Wang J,Zhan M S 2014Rev.Sci.Instrum.85 093109
[15]Zhou M K,Xiong X,Chen L L,Cui J F,Duan X C,Hu Z K 2015Rev.Sci.Instrum.86 046108
[16]Peters A,Chung K Y,Chu S 2001Metrologia38 25
[17]Luan Q L,Chen Z W,Xu J R,He H N 2014Journal of Vibration and Shock33 54(in Chinese)[欒強(qiáng)利,陳章位,徐盡榮,賀惠農(nóng)2014振動(dòng)與沖擊33 54]
[18]Chen X,Wang H,Tao W,Yang C L 2017Chinese Journal of Sensors and Actuators30 777(in Chinese)[陳希,王海,陶偉,楊春來2017傳感技術(shù)學(xué)報(bào)30 777]
[19]Liu G D,Xu X K,Liu B G,Chen F D,Hu T,Lu C,Gan Y 2016Acta Phys.Sin.65 209501(in Chinese)[劉國棟,許新科,劉炳國,陳鳳東,胡濤,路程,甘雨2016物理學(xué)報(bào)65 209501]
[20]Lu M M,Zhou J K,Lin J Q,Li Y C,Zhou X Q 2016Machine Tool&Hydraulics23 46(in Chinese)[盧明明,周家康,林潔瓊,李迎春,周曉勤2016機(jī)床與液壓23 46]
[21]Wei Y M,Liu X H,Fan Z C 2017Aerospace Control and Application43 1(in Chinese)[魏延明,劉旭輝,樊子辰2017空間控制技術(shù)與應(yīng)用43 1]
[22]Sun Y F 2017Measurement and Control Technology34 80(in Chinese)[孫亞飛 2017測控技術(shù)34 80]
[23]Hu J P,Zheng C,Li K J,Liu C P,Hu Q 2015Noise and Vibration Control35 193(in Chinese)[胡均平, 鄭聰,李科軍,劉成沛,胡騫2015噪聲與振動(dòng)控制35 193]
[24]Dai X Z,Liu X Y,Chen L 2016Acta Phys.Sin.65 130701(in Chinese)[代顯智,劉小亞,陳蕾2016物理學(xué)報(bào)65 130701]
[25]Li Z L 2015Ph.D.Dissertation(Wuhan:Huazhong University of Science and Technology)(in Chinese)[李子龍2015博士學(xué)位論文(武漢:華中科技大學(xué))]
[26]Boulandet R,Michau M,Herzog P,Micheau P,Berry A 2016J.Sound.Vib.378 14
[27]Liu L 2011Ph.D.Dissertation(Harbin:Harbin Institute of Technology)(in Chinese)[劉磊 2011博士學(xué)位論文(哈爾濱:哈爾濱工業(yè)大學(xué))]
[28]Xia Z W,Wang X T,Hou J J,Wei S B,Fang Y Y 2016J.Low Freq.Noise.Vib.Act.Control35 17
[29]Alou fiB,Behdinan K,Zu J 2016Smart Mater.Struct.25 125004
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40