推力分配干擾區域處理策略研究
2018-03-16 08:38:12周興
船電技術 2018年1期
周 興
?
推力分配干擾區域處理策略研究
周 興
(武漢船用電力推進裝置研究所,武漢 430064)
動力定位系統船舶的多推進器配置通常存在推進器間水動力干擾的問題,本文從推力優化分配中的權值矩陣考慮,提出一種權值矩陣修正的策略,在不設置推力禁區的條件下,依然可以使推進器避免落在推進器干擾區域內。
動力定位 推力分配 干擾區域 權值矩陣
0 引言
在配備推進器較多的電力推進系統平臺或者動力定位船舶上(圖1),隨著推進器數目的增多,禁區角的區域也會相應的發生變化[1,2]。一個推進器上可能出現兩個甚至更多的干擾區。
如果上游推進器都處于工作狀態時,則需考慮相應的水動力干擾問題,此時如果直接設定推力禁區角,禁止推進器進入干擾區[3,4],則會極大的縮減推力可行域,造成定位能力的下降[5]。
本文著重從權值矩陣,最小推力等方面解決關于此類情況下的水干擾區域處理方法。
1 權值矩陣對分配結果的影響分析
為充分考慮各方面因素對權值矩陣作用的影響,本節中選用船舶模型如圖2。
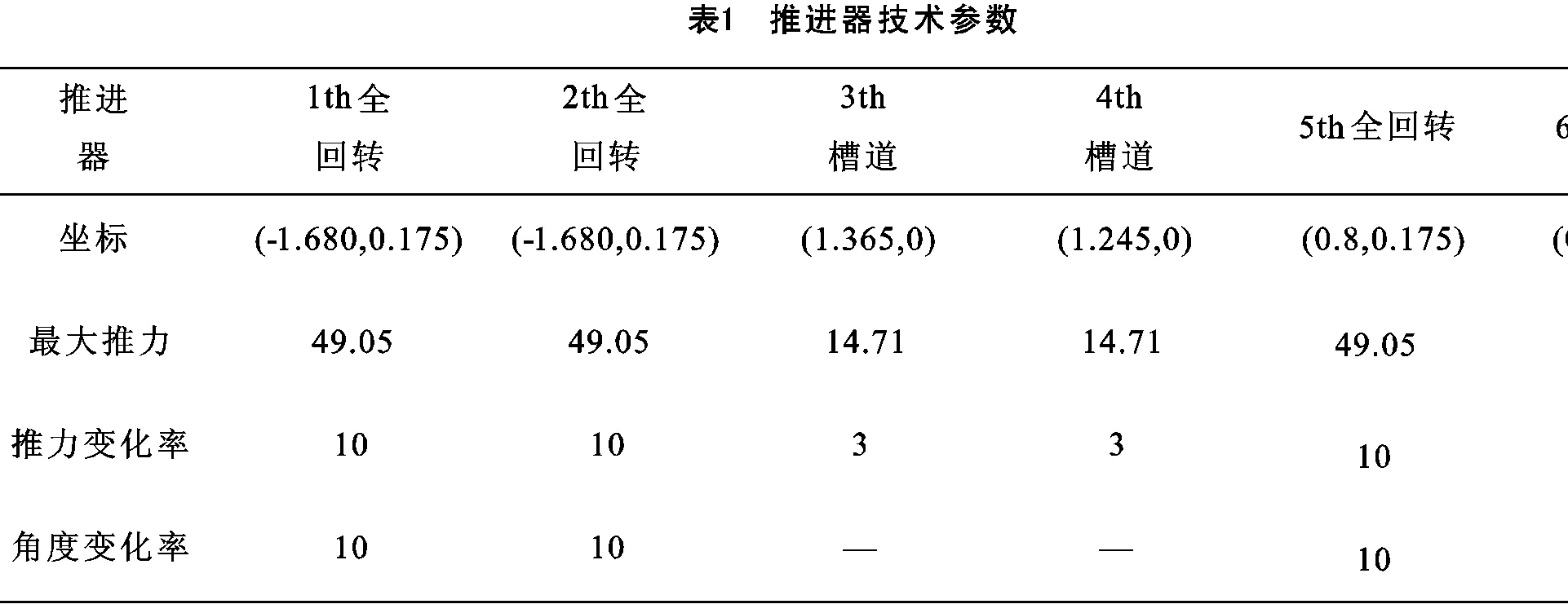
在船舶模型中包含有四個全回轉推進器,兩個槽道推進器。推進器布置如圖1所示,技術參數見表1。

圖1 動力定位系統圖

選一組典型控制力[1, 8, 0],對權值矩陣中X和Y方向權值分別進行加重處理,進行推力優化分配仿真,研究權值矩陣對分配結果的影響。
從圖3仿真結果可知,推進器在經過推力優化分配計算后的角度方向與控制力方向有密切聯系。由圖3中角度分配結果可以看出,當X方向的控制力與Y方向的控制力的比例遠小于1時,受控制力的影響,推進器可容易進入到干擾區內。
當改變權值矩陣內各個推進器Y方向分力對應的權值系數時,對分配結果有較大的影響。選取另一組典型控制力[1, 8, 0],對X方向權值加重進行仿真實驗。
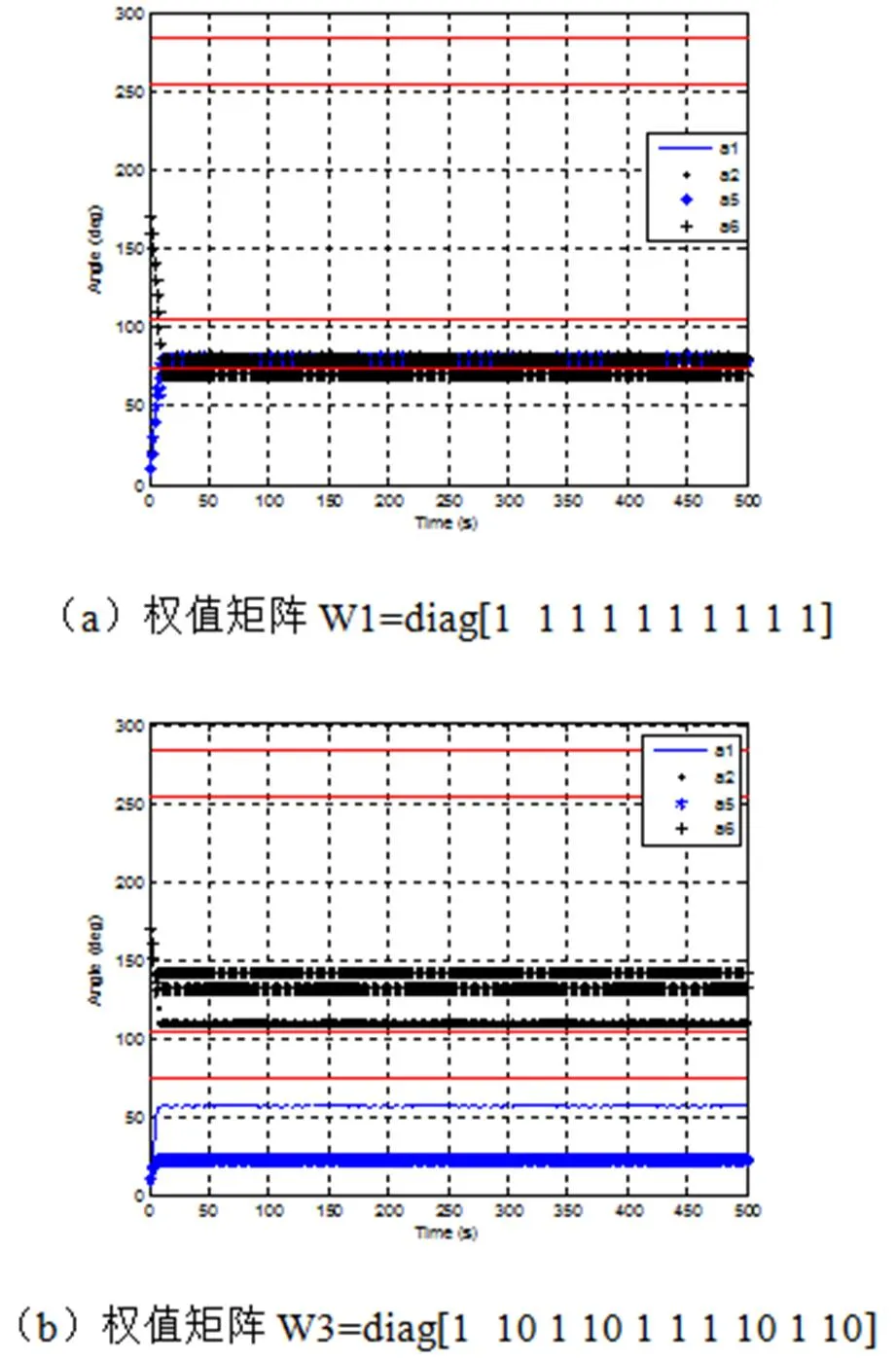
圖3 改變Y方向權值全回轉推進器角度示意圖
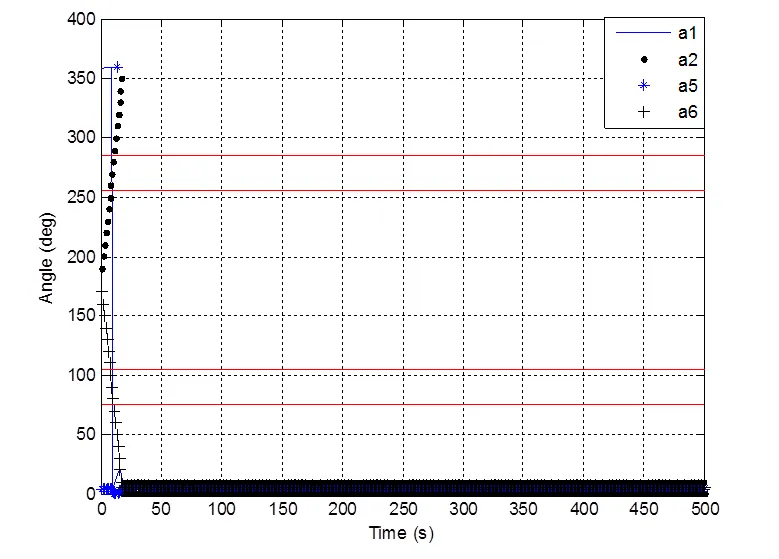
圖4 改變X方向權值全回轉推進器角度示意圖
仿真結果圖4表明,在改變權值矩陣,即對X方向權值系數進行加重處理后,分配結果中推進器角度基本不發生改變,推進器落在了推力禁區之內。這表明此時權值矩陣的改變并不能較大的影響分配結果。
對仿真數據分析可知,權值系數比例改變,主要影響了由推進器X和Y方向發出推力產生的力矩。當Y方向的正向控制力遠大于X方向時,推進器更易朝著正Y方向發力,也更容易使推進器落入禁區內,此時增大權值矩陣中Y方向分力變量對應的權值系數,使得各個推進器在Y方向的發力產生變化,推力的變化導致Y方向產生推力的力矩發生變化,為保證整體力矩輸出的定值,X方向的推力產生的力矩相應改變以滿足整體力矩的準確輸出,相應的X方向的推力發生變化,從而達到改變推進器發力角度以避免推力禁區。
2 權值矩陣處理策略
控制力的合力方向對推進器的角度分配有較大的影響,因此考慮當控制合力方向偏向向坐標軸方向時,通過改變權值系數影響角度分配結果。基于推進器布置的對稱性考慮,改變推進器的最小推力以達到避免落入干擾區域的目的,其基本原理如下:

根據以上思想,建立避免干擾區域的策略:
1)判斷當前控制周期內推進器角度是否滿足不落在禁區且離禁區邊界10度(單位周期內推進器能變化達到的最大角度)外的地方,如若滿足,則無須處理,輸出結果;若推進器角度落在禁區或者靠近干擾區10度內時,進行下面計算:
判斷當前控制力的合力方向:

2)計算分別由所有推進器X方向和Y方向分力產生的力矩大小:

a)若滿足


權值系數的加重需設上限,如果權值系數任意增加,將影響控制力偏差懲罰項的作用,導致分配結果不準確。修正權值后重新利用二次規劃算法進行推力優化分配求解。
4)若計算結果力矩大小滿足要求,則停止更新權值系數,輸出結果。
若判斷配置矩陣在X(Y)方向對稱,且則改變推進器的最小推力,將目標函數中的能耗項權值矩陣初始化為單位矩陣,并結合當前對稱推進器個數重設優化分配模型中推力下限:
3 仿真結果與分析
為了驗證權值矩陣和最小推力改變對分配結果影響的有效性,利用船舶模型在一組緩變控制力和力矩的要求下進行未處理和處理權值矩陣(最小推力)的推力分配仿真實驗,初始權值矩陣選用單位矩陣,推進器的干擾區角度見表2。

仿真結果及分析如下:
(a)

(b)
(c)
(d)
(e)
圖5 未處理推力分配分配結果
(a)
(b)

(c)
(d)

(e)
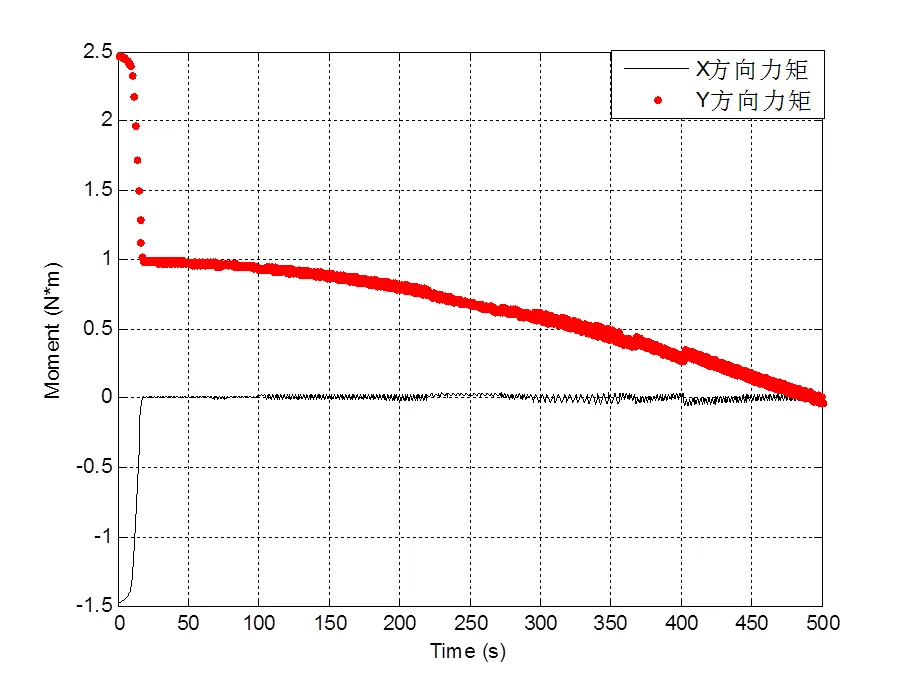
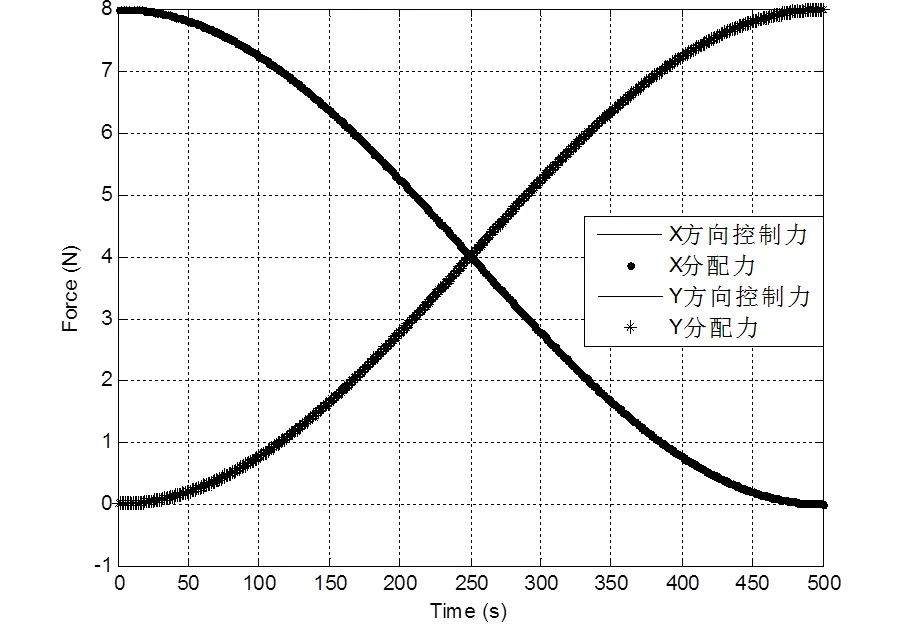
由圖5和6中a和b可以看出,未處理前和處理后分配結果都滿足控制力和力矩的要求。由圖5和6中c可知,經過權值矩陣改變和最小推力處理后的分配結果與未經處理的推進器角度分配結果相比,推進器的角度對比未處理之前,發生了較大的改變。在0-100周期內,未處理分配結果中推進器1和推進器2所處的發力角度會對推進器5和推進器6造成干擾,而在處理后,推進器1和2都有效的避開了發力干擾區;在400~500個周期內也可看到相較處理前,推進器2和6避開了發力干擾區。在0-100個周期內,X方向和Y方向的力矩沒有發生變化,此時再X方向推進器布置對稱,改變推力的下限值對推進器的角度產生了影響;在400~500周期內,X方向和Y方向的力矩發生了較大的變化,控制力的方向變化導致了Y方向權值因子的加重,推進器都未落在干擾區內,說明了經過權值矩陣加重處理對避免干擾區域的有效性。
4 結束語
本文研究了當一個推進器上存在多個干擾區時改變權值矩陣及最小推力對分配結果的影響,提出了使推進器盡可能避免落在干擾的處理策略。仿真結果說明了避免干擾區的處理方法的有效性。
[1] Millan. Thrust allocation techniques for dynamically positioned vessels[R]. 2008.
[2] 祝慶慶. 海洋工程船推力分配策略[J]. 船舶科學技術, 2013, 35(5): 21-24.
[3] 邊信黔, 付明玉, 王元慧. 船舶動力定位[M]. 北京:科學出版社, 2011.
[4] 吳顯法, 王言英. 動力定位系統的推力分配策略研究[J]. 船海工程, 2008, 37(3): 92-96.
[5] 許林凱. 動力定位推力分配混合策略研究[D]. 武漢理工大學, 2015.
Research on Handling Strategy of Thrust Allocation Interference Region
Zhou Xing
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
U664.3
A
1003-4862(2018)01-0043-05
2017-11-15
周興(1991-),男,碩士。研究方向:船舶推進系統。
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:30:02
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
