下肢康復機器人結構設計與仿真分析*
2018-03-15 03:30:28黃錦婷苑明海王海東李旭忠河海大學機電工程學院江蘇常州213002
機電工程 2018年2期
黃錦婷,苑明海,王 松,王海東,李旭忠(河海大學 機電工程學院,江蘇 常州 213002)
0 引 言
目前,由于人口老齡化、各種疾病和意外事故等因素造成肢體運動障礙或殘疾的患者日益增多[1-2],單憑人工的照看是遠遠不夠的,因此研制出一種能夠代替人工照看殘疾人、老年人的機器成為了迫切的需要[3]。下肢康復機器人能夠把患者和機械運動裝置巧妙的結合,通過機械結構的運動帶動患肢一起動作,使得患者肌肉或關節得到鍛煉以逐漸恢復正常活動,使人體肌肉組織運動功能在運動下得到鍛煉以趨于正常[4]。
機器人技術應用在康復醫學方面得到迅速的發展,在歐美等西方國家,康復機器人在市場上的占有率逐年增長[5],美國、英國、加拿大等國在康復機器人研究方面處于世界領先地位[6]。國內,史小華等[7]對早期腦卒中引起的偏癱患者的下肢進行康復訓練,發現下肢康復機器人結合運動療法能明顯提高患者的下肢運動功能[8-9];TETSSUYA MOURI等[10]研究了下肢康復機器人對下肢偏癱患者痙攣的康復治療效果,結論說明下肢康復機器人結合運動療法對患者下肢痙攣有顯著的改善作用;此外國家康復輔具研究中心探討了康復機器人技術發展的作用和意義,根據國內外康復機器人發展現狀和研究成果對未來康復機器人發展做出展望[11-12]。
本研究主要著力于可穿戴式下肢康復機器人的結構設計及運動學仿真,分析下肢髖、膝、踝3個關節的運動軌跡以及大、小腿桿件模型的靜應力,從而對康復機器人結構設計的合理性作出判斷。
1 結構設計
根據患者下肢的康復需求,下肢康復機器人總體結構設計如圖1所示。
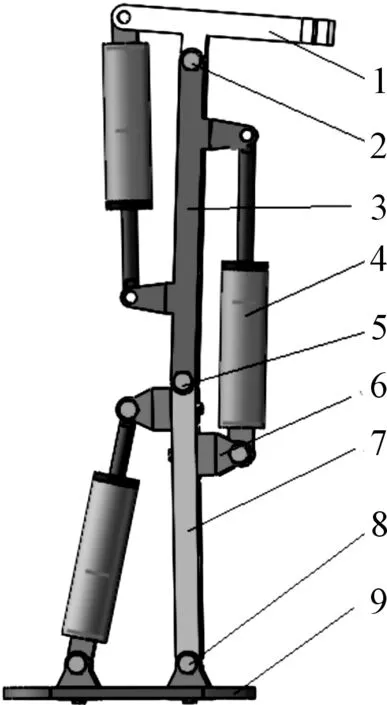
圖1 可穿戴式下肢康復機器人總體結構圖1—腰部結構;2—髖關節;3—大腿桿件;4—氣缸;5—膝關節;6—鉸鏈支座;7—小腿桿件;8—踝關節;9—足部支撐板
從空間中由下往上依次是足掌支撐部分,足部踝關節、小腿桿件模型,膝關節,大腿桿件模型,髖關節,腰帶部分,頂部減重裝置,其中驅動元件設計的氣壓傳動。
該下肢康復機器人在底部步行帶上設置壓力傳感器,可以感知足部對步行帶的壓力,然后反饋到頂部的減重裝置。當足部對步行帶壓力過大,則使氣缸帶動的繃帶拉緊以減小足部受力;當足部對步行帶壓力過小,則適當減小減重裝置對人體的拉力。筆者利用反饋系統調節頂端減重裝置對人體自重的減少量以實現對運動障礙患者進行主動康復訓練的自動化。
2 下肢各關節的運動分析
以正常青年人為參考,平均體重60 kg,平均身高170.89 cm。
該康復機器人主要涉及的人體參數如表1所示。

表1 正常人行走時相關參數
患者在進行康復訓練時,康復機器人的下肢關節與人體下肢固連,帶動患者下肢一起實現同步運動,所以機器人各關節轉過的角度由正常青年在一個步態周期內關節角度范圍而定。
正常人行走時各關節的角度變化如表2所示。

表2 正常人行走時各關節的角度變化/(°)
為了簡化人體關節四桿機構模型[13],本次設計的關節點均采用單個鉸鏈支座代替,其所連接的上下桿件均可繞著關節在同一豎直平面內旋轉。
2.1 踝關節的運動分析
踝關節模型示意圖如圖2所示。
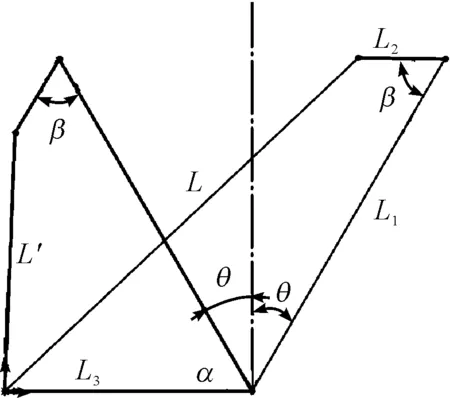
圖2 踝關節模型示意圖L—踝關節氣壓缸所在的桿件位置
經過計算設計出桿件L1、L2、L3的長度和桿件間的角度,即:L1=368 mm,L2=82.4 mm,L3=236 mm,α=60°,β=60°,θ=30°。
根據圖2中已知的幾何關系得出氣缸的行程公式。
氣缸在踝關節旋轉到最上端時,有最長距離:
(1)
氣缸在最近端時的兩端絞支座最短距離為:
(2)
由以上兩式可以得出踝關節處氣壓缸的行程為:
H=L-L′
(3)
代入數據,計算可得:H=465.23-248.23=217 mm。
2.2 膝關節的運動分析
膝關節模型示意圖如圖3所示。
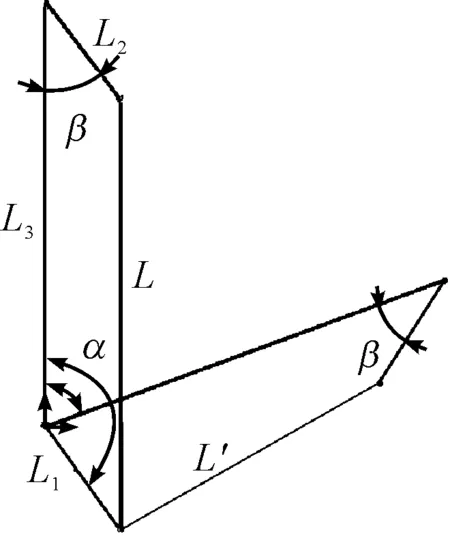
圖3 膝關節模型示意圖
根據分析可知,與膝關節相連接的兩根桿件相對轉過的角度為0°~70°,圖3中所示即為膝關節所處的兩個極限位置,計算得到氣壓缸活塞的行程。
正常人筆直站立時,大腿所在位置的氣壓缸活塞到達最遠端;而膝關節彎曲時,氣缸活塞到達最近端。經過計算設計出桿件的長度分別為L1=128.5 mm,L2=120 mm,L3=418 mm,桿件間的角度為α=70°~144.38°,β=37.38°,則氣缸兩端鉸鏈支座的最遠距離和最近距離分別為:L=426.4 mm,U=293.6 mm。所以驅動膝關節處連接的桿件旋轉的氣壓缸行程為:H=L-U=426.4-293.6=132.8 mm。
2.3 髖關節的運動分析
髖關節運動模型示意圖如圖4所示。
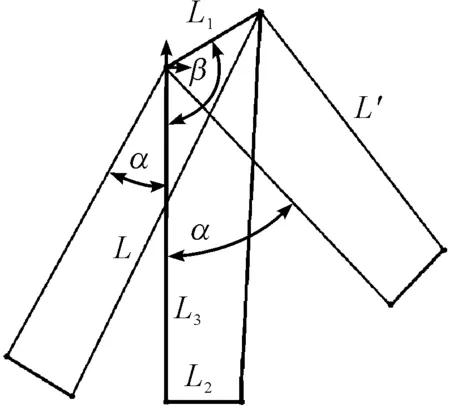
圖4 髖關節模型示意圖L1—髖關節中心到氣壓缸上端活塞缸支座中心的距離;L2—氣壓缸活塞桿所連接的支座高度;L3—大腿部分的長度
從前面表格中可知:大腿擺動的角度范圍為-30°~45°,其中,L和L′分別是髖關節旋轉到這兩個極限位置時,驅動大腿擺動的氣壓缸的最長與最短距離。經過計算得出桿件的長度分別為:L1=106.47 mm,L2=73.31 mm,L3=310.22 mm,桿件間的角度為α=-30°~45°,β=1 119.75°。
通過上述公式計算可得:L=402.67 mm,L′=283.74 mm。因此,驅動髖關節的氣壓缸行程為:H=L-L′=402.67-283.74 mm。
3 機構運動仿真
3.1 運動學仿真分析
該下肢康復機器人的運動是模擬正常人。正常人在中速情況下行走,一個步態周期所用的平均時間是1.16 s,分解一個步態周期是把1個周期分成7個階段,初始時刻是下肢兩側均處于豎直站立的狀態,這個狀態將其定義為零時刻,接著分別進入支撐階段和擺動階段,支撐階段的初期、中期、后期分別占據整個步態周期的10%、25%、10%,擺動階段的初期、中期、末期所占比例分別為20%、15%、15%,再加上從初始狀態過渡到第一個狀態這段時間,定義為Δ01,這段時間段所占比例為5%,以此劃分整個步態周期。
劃分好時間階段后,測量各個時間狀態下支座之間的距離。本次測量主要是3個氣缸在不同狀態下的長度,即氣缸缸筒一端的鉸支座中心與活塞桿一端的支座中心之間的距離。兩個相鄰時刻下對應測出的兩個位移之間的差值即為這個時間段活塞的位移。
考慮到一個步態周期的時間太短(1.16 s),這對仿真時觀察運動帶來不便,所以將步態周期延長到10 s。
將步態周期各個時刻對應測量的距離列表,結果如表3所示。
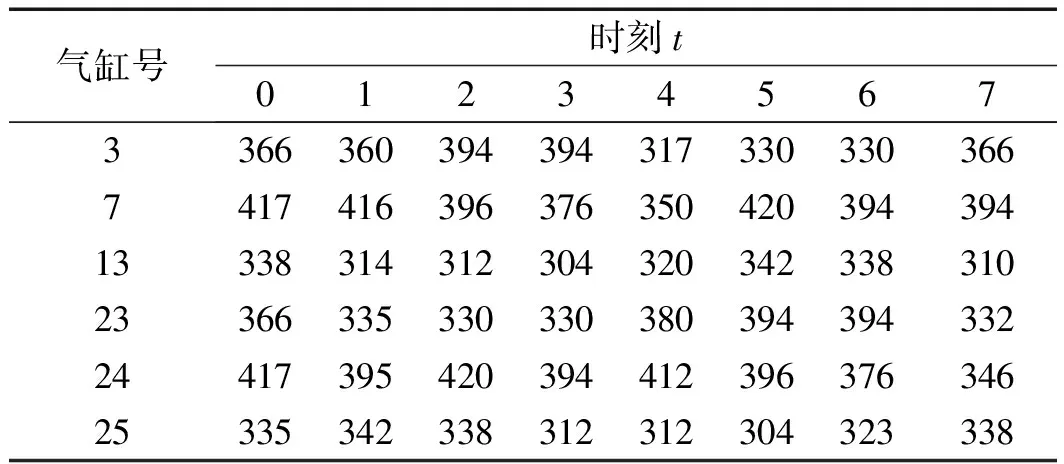
表3 氣缸兩端支座中心之間隨著各個時刻對應測量的距離/mm
將時間延長為10 s后的步態周期內時間段劃分,結果如表4所示。
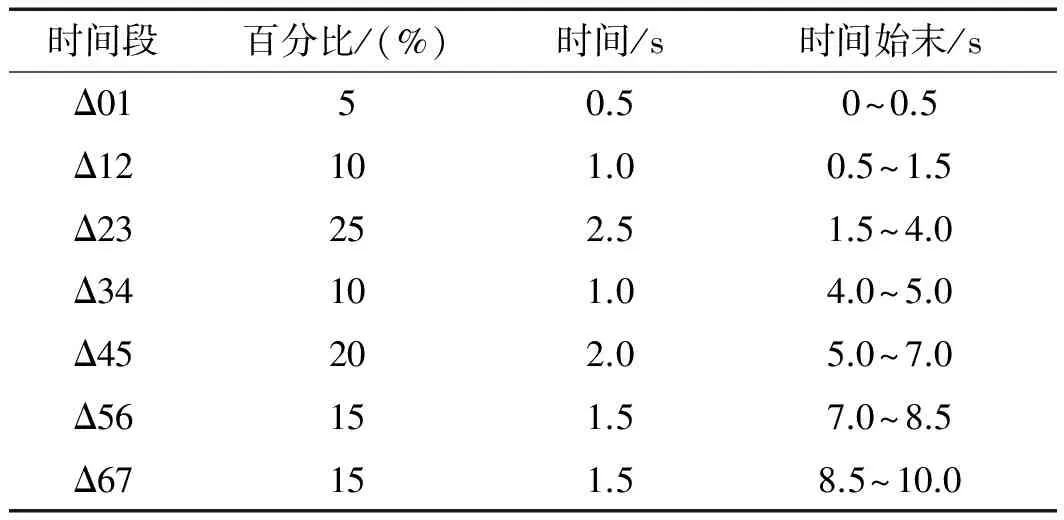
表4 時間段的劃分
注:表中ΔtiΔti+1(i=0,1……6)表示相鄰兩時刻之間這一段時間
氣缸活塞桿在每個時間段內的位移變化量Δh是指一個時間段內活塞桿向外伸長或向內縮短的位移量,活塞桿向外伸長定義為負值,向內縮短定義為正。
具體的位移隨時間變化值如表5所示。
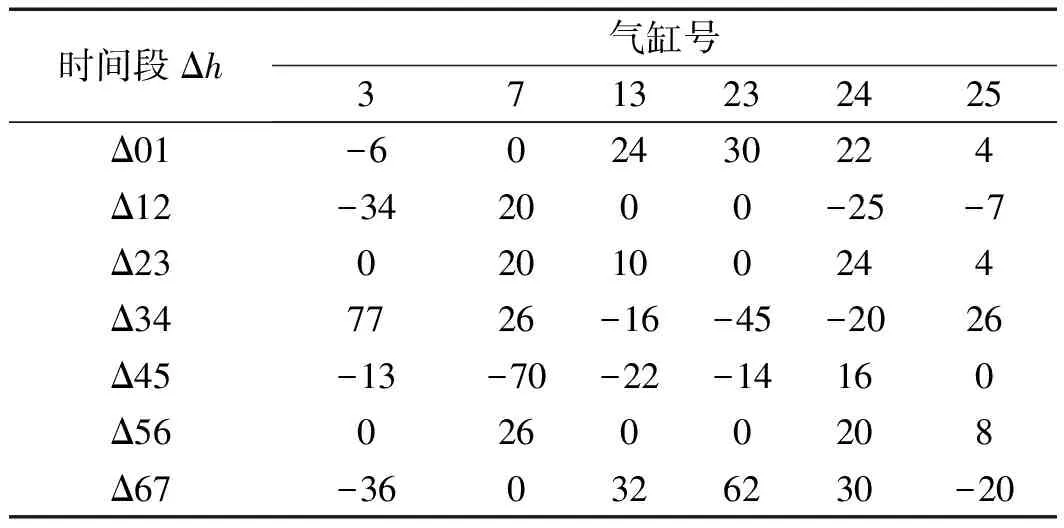
表5 氣缸活塞在各個時間段的行程/mm
3.2 運動學仿真分析
本次運動學仿真分析是將腰部結構視作固定機架,因此髖關節運動軌跡隨時間變化為一條水平直線,筆者主要研究膝關節和踝關節的運動情況。
踝關節運動軌跡隨時間變化曲線圖如圖5所示。
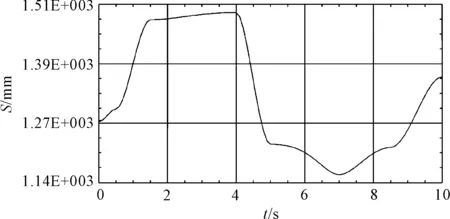
圖5 踝關節運動軌跡隨時間變化曲線
觀察曲線走勢,與正常人行走軌跡大致接近,可實現恢復患者運動機能的目的。
膝關節運動軌跡隨時間變化曲線圖如圖6所示。
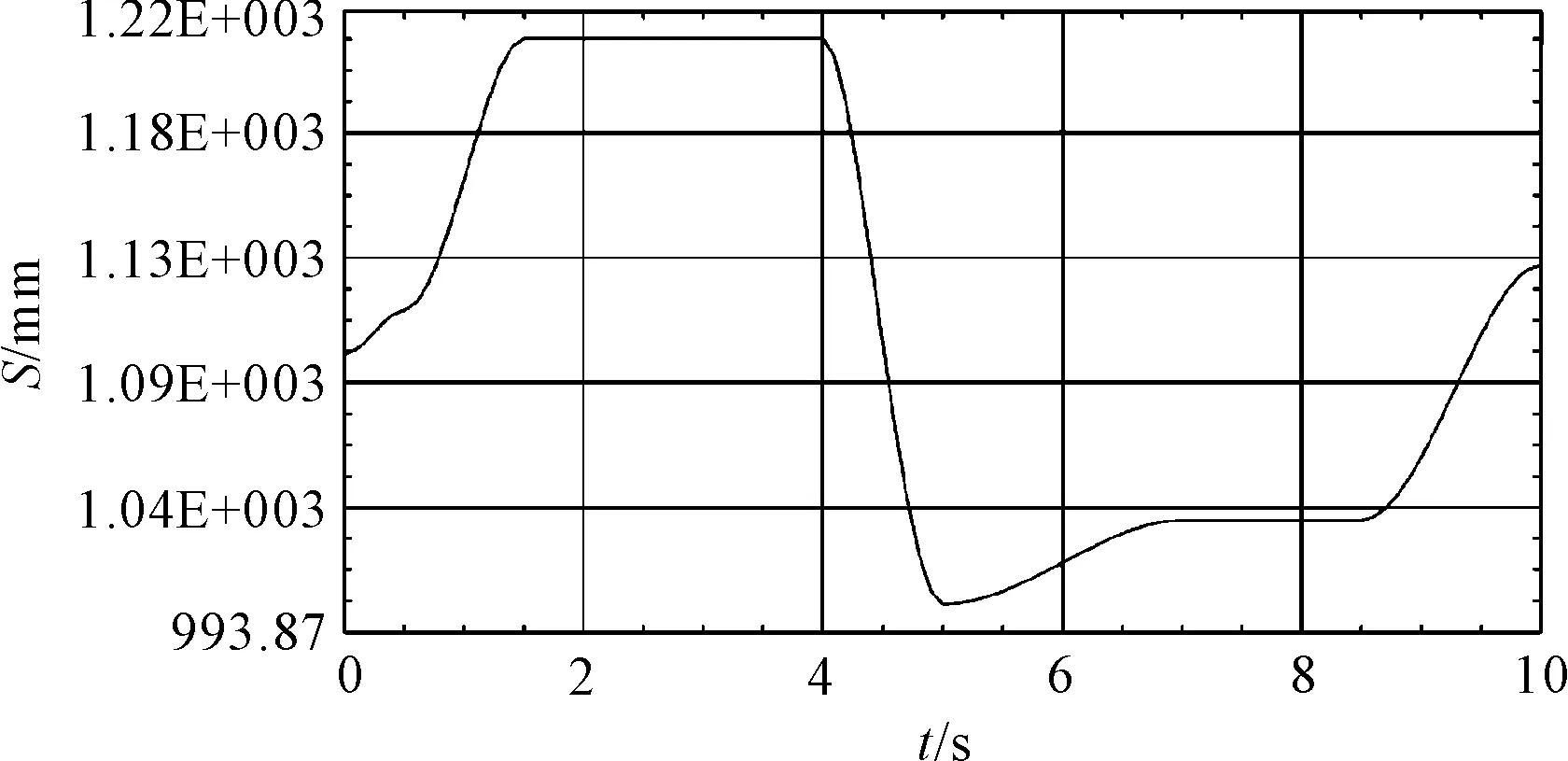
圖6 膝關節運動軌跡隨時間變化曲線
3.3 靜力學仿真分析
該康復機器人機構設計中下肢零部件大腿和小腿這兩個零件模型在整個機構中起著關鍵作用,它們既是承載構件又是傳動構件,尤其是桿件上的支座在承受靜應力時候最容易發生失效,所以需要對兩個腿部桿件進行靜應力分析。
3.3.1 大腿桿件模型靜力學分析
大腿桿件模型所受應力的情況如圖7所示。
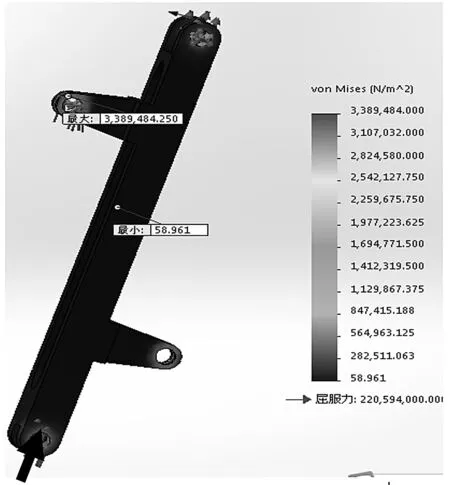
圖7 大腿桿件模型所受應力分布圖
圖7中,箭頭表示大腿桿件所受集中力的方向,經過有限元仿真后,從等效應力云圖中可知是最大應力產生位置在鉸鏈支座內圓表面上,其應力值大小為3.39 MPa,因大腿桿件選擇材料為1060H12型鋁合金,其許用應力大小為[σ]=87 MPa,而實際應力的最大值遠小于材料的許用應力值。因此,大腿桿件模型強度符合要求。
3.3.2 小腿桿件模型靜力學分析
小腿桿件模型所受應力的情況如圖8所示。

圖8 小腿桿件模型所受應力分布圖
兩端鉸鏈支座構成的旋轉副內圓表面上出現最大的應力值,最大應力為0.74 MPa,同樣,小腿桿件制造時也采用型號為1060H12的鋁合金材料,此次靜力學分析所得的實際最大應力遠小于該材料的許用應力值,故該模型的設計強度合格。
4 結束語
根據下肢輕度癱瘓患者鍛煉肌肉的要求,本研究提出了一種結構簡單的可穿戴式下肢康復機器人,將該機器人的運動與患者下肢的康復運動結合起來,建立了人機一體化模型,并對該機器人模型進行了仿真分析,得到了髖、膝、踝3個關節的運動軌跡以及大、小腿桿件的靜應力分布。
仿真結果證明:該下肢康復機器人結構設計有可行性,能夠對患者的髖、膝、踝關節進行有效的康復訓練,達到鍛煉肌肉的目的。
[1] 胡 進,侯增廣,陳翼雄,等.下肢康復機器人及其交互控制方法[J].自動化學報,2014,40(11):2377-2390.
[2] 李緯華,孫洪穎.下肢康復機器人人機運動分析及仿真研究[J].機電工程技術,2016,45(8):24-27.
[3] TAISUKE S, NOBUHIRO U, KANTA A, et al. Rehabilitation robots assisting in walking training for SCI patient[J].IFACProceedingsVolumes,2012,45(18):178-183.
[4] HADI K, SAHAR M, ALIREZA A. Towards an semg-based tele-operated robot for masticatory rehabilitation[J].ComputersinBiologyandMedicine,2016(75):243-256.
[5] MUSTAFA S A, ISMAIL H A. Fuzzy logic based adaptive admittance control of a redundantly actuated ankle rehabilitation robot[J].ControlEngineeringPractice,2017(59):44-54.
[6] MARCEL M, ONDREJ L. Design of active feedback for rehabilitation robot[J].AppliedMechanicsandMaterials,2014,3354(611):529-535.
[7] 史小華,王洪波,孫 利,等.外骨骼型下肢康復機器人結構設計與動力學分析[J].機械工程學報,2014,50(3):41-48.
[8] 陳 勇,朱雪萍,李榮華,等.老年人外骨髓機器人斜坡行走的運動學分析[J].機械,2016(1):36-39,48.
[9] 韓進虎,俞經虎.食品檢測咀嚼機器人靈活性分析與運動仿真[J].輕工機械,2016,34(2):20-24.
[10] TETSUYA M, HARUHISA K, TAKAAKI A, et al. Telerehabilitation for fingers and wrist using a hand rehabilitation support system and robot hand[J].IFACProceedingsVolumes,2009,42(16):603-608.
[11] SHENG Bo, ZHANG Yan-xin, MENG Wei, et al. Bilateral robots for upper-limb stroke rehabilitation: state of the art and future prospects[J].MedicalEngineeringandPhysics,2016,38(7):587-606.
[12] ZHU Ai-bin, HE Sheng-li, HE Da-yong, et al. Conceptual design of customized lower limb exoskeleton rehabilitation robot based on axiomatic design[J].ProcediaCIRP.,2016(53):219-224.
[13] CHU Yan, SHAO Yan, CHEN Liang. Analysis and design of a wearable robot for lower-limb rehabilitation training[J].AppliedMechanicsandMaterials,2012,1511(135):256-260.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:33:14
