一種改善無(wú)人機(jī)自動(dòng)返航降落誤差的方法
2018-03-13 21:25:19劉康張家田嚴(yán)正國(guó)
現(xiàn)代電子技術(shù) 2018年6期
劉康+張家田+嚴(yán)正國(guó)
摘 要: 針對(duì)車載無(wú)人機(jī)自動(dòng)返航降落誤差太大的缺點(diǎn),提出一種基于利用GPS粗定位、運(yùn)動(dòng)檢測(cè)技術(shù)細(xì)定位相結(jié)合的方法。為了實(shí)現(xiàn)選擇簡(jiǎn)單且效果好的運(yùn)動(dòng)檢測(cè)技術(shù),使用一種攝像頭靜止、目標(biāo)移動(dòng)的結(jié)構(gòu)方法,最終采用背景減除算法追蹤無(wú)人機(jī)。室外實(shí)驗(yàn)結(jié)果表明,無(wú)人機(jī)能被精準(zhǔn)追蹤,將這種方法與僅僅GPS定位的實(shí)驗(yàn)結(jié)果進(jìn)行對(duì)比,得出該方法能有效抑制降落誤差,具有一定的實(shí)際應(yīng)用價(jià)值。
關(guān)鍵詞: 車載無(wú)人機(jī); GPS; 運(yùn)動(dòng)檢測(cè)技術(shù); 自動(dòng)返航; 降落誤差; 背景減除算法
中圖分類號(hào): TN820.4?34 文獻(xiàn)標(biāo)識(shí)碼: A 文章編號(hào): 1004?373X(2018)06?0061?04
Abstract: In allusion to the shortcoming of big automatic return landing error existing in vehicle?mounted unmanned aerial vehicle (UAV), a method based on combination of rough GPS localization and fine localization using motion detection technology is proposed. To select a plain and effective motion detection technology, a structural approach with camera static and object moving is employed. The background subtraction algorithm is adopted to track UAV. The outdoor experimental results indicate that the UAV can be tracked precisely, and the method can more effectively suppress the landing error in comparison with the method using only GPS localization and has a certain practical application value.
Keywords: vehicle?mounted UAV; GPS; motion detection technology; automatic return; landing error; background subtraction algorithm
輕小型無(wú)人機(jī)的快速發(fā)展,許多無(wú)人機(jī)的控制精度、懸停穩(wěn)定性已經(jīng)明顯提高。甚至圖傳、超聲波避障,三軸云臺(tái)增穩(wěn)等新技術(shù)的使用,可以使無(wú)人機(jī)應(yīng)用在許多具體的任務(wù)中,如無(wú)人機(jī)在礦體測(cè)繪系統(tǒng)[1]、無(wú)人機(jī)地震災(zāi)害中的應(yīng)用[2]、以及無(wú)人機(jī)在農(nóng)業(yè)上的使用[3]等。具體到車載無(wú)人機(jī),即無(wú)人機(jī)降落在靜止汽車車頂停機(jī)坪中,無(wú)人機(jī)返航過(guò)程手動(dòng)控制遙控器降落在車頂本身有一定困難,無(wú)人機(jī)一鍵返航利用GPS記錄起飛點(diǎn),使無(wú)人機(jī)自動(dòng)降落在起飛點(diǎn),但受GPS水平精度限制,無(wú)人機(jī)無(wú)法準(zhǔn)確降落在起飛點(diǎn)。光流傳感器和慣性測(cè)量模塊相定位的方法[4]是利用無(wú)人機(jī)上雙攝像頭和慣性導(dǎo)航模塊提高了無(wú)人機(jī)室內(nèi)的定位精度,光流法計(jì)算復(fù)雜,且增加了無(wú)人機(jī)的成本和負(fù)載。擴(kuò)展卡爾曼算法的定位[5]是當(dāng)GPS信號(hào)突然失效時(shí),利用機(jī)載無(wú)線射頻的接收信號(hào)強(qiáng)度解決定位問(wèn)題,此方法定位精度還無(wú)法滿足車載無(wú)人機(jī)的精度要求。
考慮到車載無(wú)人機(jī)室外的應(yīng)用背景,提出利用背景減除算法與GPS定位相結(jié)合的方法,其是一種先粗定位后細(xì)定位設(shè)計(jì)方案。本文首先整體上介紹一鍵返航啟動(dòng)之后無(wú)人機(jī)的控制過(guò)程,然后討論背景減除算法相關(guān)參數(shù)的確定以及無(wú)人機(jī)在圖像中的位置信息,實(shí)現(xiàn)無(wú)人機(jī)的準(zhǔn)確降落,本文提出的方法是針對(duì)室外環(huán)境而言。
1 系統(tǒng)構(gòu)成
1.1 整體結(jié)構(gòu)
本系統(tǒng)由三個(gè)部分構(gòu)成:車載無(wú)人機(jī)、遙控器、停機(jī)坪。車載無(wú)人機(jī)具有GPS定位模塊,記錄無(wú)人機(jī)的初始起飛點(diǎn),數(shù)字氣壓計(jì),用于測(cè)量無(wú)人機(jī)高度以及加速度計(jì)和陀螺儀聯(lián)合使用進(jìn)行無(wú)人機(jī)運(yùn)動(dòng)補(bǔ)償。遙控器只用到無(wú)人機(jī)與遙控器通信傳輸模塊和一鍵返航按鍵。廣角攝像頭位于停機(jī)坪的中心,用來(lái)獲取無(wú)人機(jī)的圖像信息。遙控器與停機(jī)坪的攝像頭有線連接,利用遙控器上手機(jī)自帶的APP進(jìn)行算法控制,遙控器與無(wú)人機(jī)只傳輸控制信息和反饋信息。與目前市面上無(wú)人機(jī)圖傳系統(tǒng)相比,優(yōu)點(diǎn)是遙控器與無(wú)人機(jī)傳輸信息少,實(shí)時(shí)性更好;缺點(diǎn)是這一過(guò)程沒(méi)有利用無(wú)人機(jī)自帶的攝像頭,沒(méi)有無(wú)人機(jī)降落畫面。具體的結(jié)構(gòu)示意圖如圖1所示。
1.2 無(wú)人機(jī)返航控制流程
當(dāng)遙控器的一鍵返航啟動(dòng),無(wú)人機(jī)先垂直飛行到設(shè)置的返航高度。然后再水平飛行到GPS記錄的起飛點(diǎn)上空,打開(kāi)停機(jī)坪中間的攝像頭獲取無(wú)人機(jī)圖像,利用運(yùn)動(dòng)檢測(cè)的方法確定懸停中無(wú)人機(jī)的位置信息,根據(jù)位置信息確定無(wú)人機(jī)所在平面的運(yùn)動(dòng)方向,當(dāng)無(wú)人機(jī)進(jìn)行平移時(shí)不斷計(jì)算圖像中無(wú)人機(jī)中心與圖像中心的距離。由于無(wú)人機(jī)移動(dòng)的慣性影響,給定一個(gè)距離誤差,當(dāng)距離小于距離誤差時(shí),就認(rèn)為無(wú)人機(jī)的中心與圖像中心重合,水平移動(dòng)完成。控制無(wú)人機(jī)垂直下降一定距離,再判斷水平距離,若滿足小于距離誤差,繼續(xù)垂直下降,如此循環(huán),最終使無(wú)人機(jī)降落在停機(jī)坪上。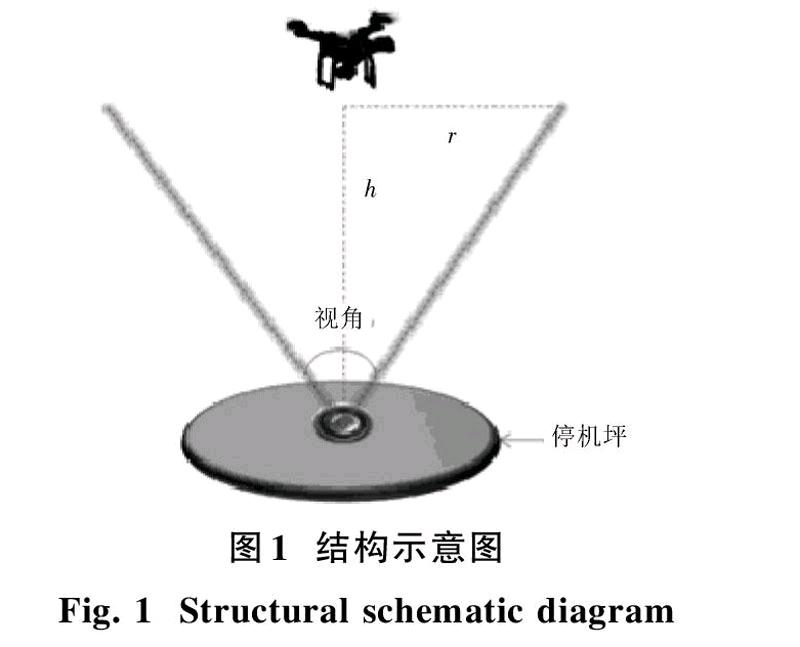
2 運(yùn)動(dòng)檢測(cè)算法確定
整個(gè)流程最關(guān)鍵的是從圖像序列中檢測(cè)出來(lái)無(wú)人機(jī)的位置信息,也就歸結(jié)為運(yùn)動(dòng)檢測(cè)。
運(yùn)動(dòng)檢測(cè)算法常見(jiàn)的有如下幾種:
1) 圖像差分算法。圖像差分利用相鄰兩幀圖像差值獲取運(yùn)動(dòng)目標(biāo),去除兩幀圖像的共有背景。優(yōu)點(diǎn)是計(jì)算簡(jiǎn)單,缺點(diǎn)是圖像采樣率、移動(dòng)目標(biāo)的移動(dòng)速度、目標(biāo)與攝像頭的距離會(huì)對(duì)檢測(cè)效果產(chǎn)生很大影響,當(dāng)目標(biāo)與攝像頭距離較近、目標(biāo)移動(dòng)過(guò)快、圖像采樣率低時(shí),會(huì)產(chǎn)生大量背景區(qū)域出現(xiàn)在目標(biāo)區(qū)域中,這樣對(duì)于后續(xù)想要用目標(biāo)矩形作為目標(biāo)的輪廓框比較困難,不能完整分割出目標(biāo)。為了改善幀差檢測(cè)使目標(biāo)存在的較大空洞,也出現(xiàn)了改進(jìn)的幀差運(yùn)動(dòng)檢測(cè)算法[6]。endprint
2) 模板匹配算法。這里所說(shuō)的模板匹配算法中的模板指的是存入在內(nèi)存中無(wú)人機(jī)圖片庫(kù),通過(guò)比對(duì)模板與視頻中每一幀圖像,尋找無(wú)人機(jī)在每幀圖像中的位置,比對(duì)的方法通過(guò)相關(guān)兩幅圖像。這種算法的優(yōu)點(diǎn)在簡(jiǎn)單場(chǎng)景中匹配比較準(zhǔn)確,不需要進(jìn)行濾波處理,缺點(diǎn)是對(duì)內(nèi)存和CPU性能要求較高,考慮到目標(biāo)離攝像頭的距離,內(nèi)存需要存儲(chǔ)大量實(shí)驗(yàn)?zāi)繕?biāo)的圖片作為模板,且對(duì)應(yīng)的相關(guān)操作有大量的乘積運(yùn)算,計(jì)算要求較高。該算法適合目標(biāo)與攝像頭距離比較固定的場(chǎng)合。為了改善計(jì)算時(shí)間較長(zhǎng),出現(xiàn)了改進(jìn)歸一化的灰度匹配算法[7]。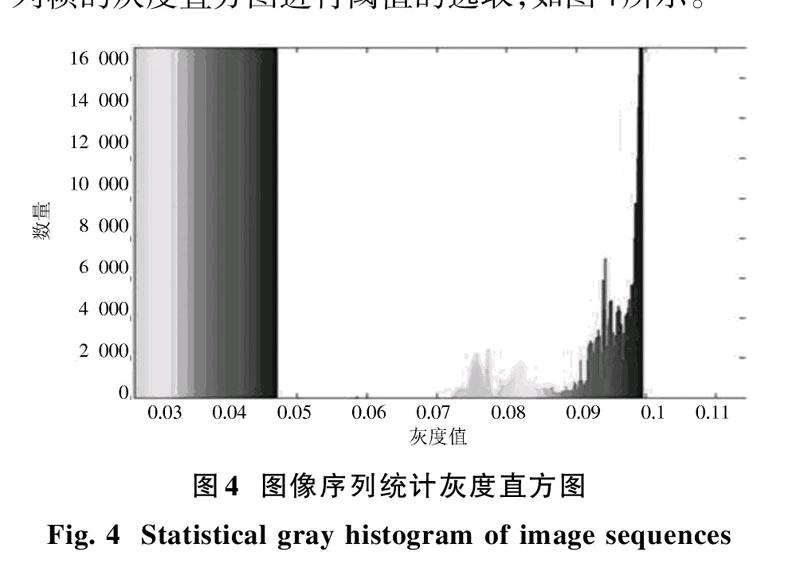
3) 背景減除算法。背景減除算法是用當(dāng)前圖像減去背景圖像得到差值圖像,通過(guò)設(shè)定一定的閾值將絕對(duì)值的差值圖像轉(zhuǎn)為二值圖像。然后通過(guò)濾波等操作得到移動(dòng)目標(biāo),這種算法適合于背景在大部分時(shí)間可見(jiàn)的場(chǎng)合[8?9],從無(wú)人機(jī)水平飛進(jìn)攝像頭視野中有幾秒時(shí)間完全可以構(gòu)建初始背景圖像,所以本實(shí)驗(yàn)采用背景減除算法。
2.1 獲取圖像中的無(wú)人機(jī)
背景建模的關(guān)鍵是對(duì)背景的提取,從自動(dòng)返航按鍵啟動(dòng)到無(wú)人機(jī)移動(dòng)到視野有幾秒鐘時(shí)間。利用這段時(shí)間采樣N幀圖像對(duì)背景建模初始化,背景提取影響著對(duì)目標(biāo)的檢測(cè),是背景減除算法的核心。本文使用時(shí)間背景建模,其中包括兩種方法:均值法和中值法[10?11]。
1) 均值法是用對(duì)應(yīng)像素點(diǎn)在時(shí)間序列上的均值代替對(duì)應(yīng)背景點(diǎn)的像素值,其公式為:
[Bx,y=n=1NIn(x,y)N] (1)
2) 中值法是用對(duì)應(yīng)像素點(diǎn)在時(shí)間序列上的中值代替對(duì)應(yīng)背景點(diǎn)的像素值,其公式為:
[Bx,y=MedInx,y, 1nN] (2)
式中:[Bx,y]屬于初始背景像素點(diǎn)灰度值;[Inx,y]屬于初始化圖像序列幀中對(duì)應(yīng)像素點(diǎn)的灰度值。均值法容易受到噪聲的干擾,中值法會(huì)排除噪聲干擾。本實(shí)驗(yàn)獲取了前N幀圖像,通過(guò)改變圖像尺寸的方法和使用Buffer緩沖器獲取每一點(diǎn)N幀的圖像序列的灰度值的中值,獲取初始背景幀中像素點(diǎn)中的灰度值,再恢復(fù)原圖像的尺寸即初始背景幀。圖2為背景幀初始化流程圖。
初始背景幀提取之后再進(jìn)行背景減除,背景減除利用當(dāng)前圖像和背景圖像進(jìn)行差分獲取移動(dòng)區(qū)域即檢測(cè)出背景中不存在的區(qū)域或明顯差異的區(qū)域。這部分區(qū)域包括移動(dòng)目標(biāo)和噪聲干擾,然后通過(guò)設(shè)置閾值來(lái)獲得前景圖像的二值圖像,公式為:
[Bdx,y=1, Ix,y-Ib(x,y)Ith0, Ix,y-Ib(x,y) 式中:[Ix,y]為當(dāng)前圖像像素點(diǎn)的灰度值;[Ib(x,y)]為背景像素點(diǎn)的灰度值;[Bdx,y]為二值圖像;[Ith]為灰度值閾值。差值大于等于[Ith]的為前景,小于[Ith]的為背景。 2.2 無(wú)人機(jī)位置信息確定 利用上述背景減除算法檢測(cè)出無(wú)人機(jī)之后,然后需要確定無(wú)人機(jī)位置信息。位置信息的確定可以控制無(wú)人機(jī)運(yùn)動(dòng)方向和移動(dòng)的距離。由于攝像頭處于停機(jī)坪中間即無(wú)人機(jī)的起飛點(diǎn),圖像的中心也是停機(jī)坪的中心,如果以圖像的中心為原點(diǎn),正北和正東分別為y軸和x軸,無(wú)人機(jī)所在水平平面建立直角坐標(biāo)系,只要獲取無(wú)人機(jī)在圖像中的坐標(biāo)即位置信息。無(wú)人機(jī)的高度由無(wú)人機(jī)上數(shù)字氣壓計(jì)給出。 在自動(dòng)返航過(guò)程需要說(shuō)明的是機(jī)頭的方向一直是正北方向,根據(jù)坐標(biāo)(x,y)的正負(fù)值判斷無(wú)人機(jī)是往正北、正南,還是正東、正西飛行,圖3為無(wú)人機(jī)水平坐標(biāo)示意圖。 3 相關(guān)參數(shù)確定及實(shí)驗(yàn)結(jié)果 本實(shí)驗(yàn)選取的廣角攝像頭視角為60°,啟動(dòng)一鍵返航,進(jìn)入視野之后進(jìn)行距離和方向的微調(diào),到距離停機(jī)坪高度h時(shí)停止水平距離調(diào)整,垂直降落,這是考慮到無(wú)人機(jī)仍在攝像頭視野中。如圖1所示,當(dāng)高度為h,無(wú)人機(jī)到視角邊緣的半徑為r,可以用公式表示為: [tan θ2=rh] (4) 式中:[θ]為選用攝像頭的視角;h為無(wú)人機(jī)所處的高度;r為無(wú)人機(jī)中心到視角邊緣的半徑。本實(shí)驗(yàn)設(shè)置的h為1 m,計(jì)算出r為1.15 m。 在當(dāng)前圖像和背景圖像相減得到的差分圖像中,通過(guò)選取合適的[Ith],得到合適的二值前景圖。[Ith]的選取很關(guān)鍵,它直接影響到后面的濾波操作以及最終目標(biāo)的提取。通過(guò)大量的實(shí)驗(yàn),選取目標(biāo)剛出現(xiàn)在視野中的圖像序列幀的灰度直方圖進(jìn)行閾值的選取,如圖4所示。 由于差分的結(jié)果,大量的灰度值集中在0~1附近,其中灰度值數(shù)量最多集中在0附近,屬于黑色的背景,少量灰度值數(shù)量的是目標(biāo),屬于前景。從圖4中可以看出,當(dāng)閾值為0.05~0.07之間屬于最合適的閾值選取范圍,當(dāng)閾值選取的過(guò)小或者過(guò)大,分別會(huì)出現(xiàn)噪聲明顯增多或目標(biāo)邊緣被誤認(rèn)為背景像素。 由上述得到的前景圖像再進(jìn)行形態(tài)學(xué)濾波處理,結(jié)構(gòu)元素的選取對(duì)圖像的濾波效果產(chǎn)生很大的影響,結(jié)構(gòu)元素的形狀有直線型、矩形、菱形、圓盤形等對(duì)稱式結(jié)構(gòu)。結(jié)構(gòu)元素的尺寸要根據(jù)具體的圖像來(lái)選擇參數(shù)。尺寸太小無(wú)法連接目標(biāo)斷裂較大的區(qū)域,增加塊區(qū)域的數(shù)目;尺寸太大會(huì)導(dǎo)致毗鄰不相關(guān)兩塊區(qū)域的級(jí)聯(lián)。這兩種情況都直接影響最終前景目標(biāo)的完整提取,使用形態(tài)學(xué)操作中的膨脹操作,膨脹系數(shù)模板是使用5×5的矩形。可以把結(jié)構(gòu)元素看作是卷積模板,盡管膨脹是以集合運(yùn)算為基礎(chǔ),而卷積是以算術(shù)運(yùn)算為基礎(chǔ),膨脹的具體實(shí)現(xiàn)過(guò)程和卷積相似,都是先對(duì)模板進(jìn)行翻轉(zhuǎn),由于模板的對(duì)稱性,翻轉(zhuǎn)前后一樣,然后使模板滑過(guò)圖像,模板像素和圖像像素之間進(jìn)行“或”操作[12]。 經(jīng)過(guò)形態(tài)學(xué)濾波操作之后是進(jìn)行塊分析,噪聲經(jīng)過(guò)上述幾步操作之后大部分已經(jīng)濾除掉了,可能有個(gè)別的較大噪聲經(jīng)過(guò)濾波操作之后還會(huì)伴隨目標(biāo)一起出現(xiàn)在前景中,根據(jù)無(wú)人機(jī)自動(dòng)返航過(guò)程設(shè)置的返航高度。當(dāng)無(wú)人機(jī)進(jìn)入視野到無(wú)人機(jī)移出視野時(shí),計(jì)算無(wú)人機(jī)塊區(qū)域像素?cái)?shù)量的最小值和最大值,相應(yīng)的公式表示為: 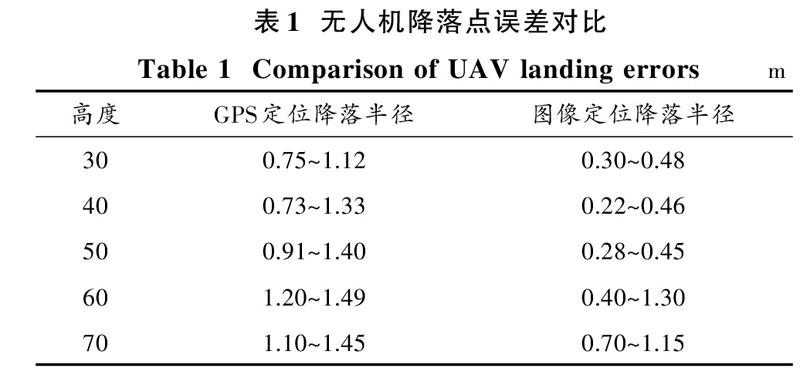
[Obj=1, areaminareaareamax0, other] (5)
式中:[area]為每個(gè)塊中像素的個(gè)數(shù);[areamin]和[areamax]為設(shè)定的塊區(qū)域像素?cái)?shù)量的最小值和最大值;[Obj]為邏輯與的判斷結(jié)果,只有符合邏輯結(jié)果為1時(shí)才是前景目標(biāo)。
本實(shí)驗(yàn)中使用的是大疆Phantom 3 Advanced無(wú)人機(jī),質(zhì)量1 280 g,水平懸停精度1.5 m,垂直懸停精度0.5 m,最大水平飛行速度16 m/s。經(jīng)運(yùn)動(dòng)檢測(cè)獲取的無(wú)人機(jī)位置如圖5所示。由于無(wú)人機(jī)的慣性影響,經(jīng)測(cè)試,設(shè)置圖像中無(wú)人機(jī)中心與圖像中心的距離誤差為20,20個(gè)像素以內(nèi)即認(rèn)為兩個(gè)中心重合。
考慮到樹木和普通建筑高度,選取無(wú)人機(jī)的返航高度大于等于30 m,即30 m,40 m,50 m,60 m,70 m,它們分別對(duì)應(yīng)的[areamin]為1 020,430,120,50,25,[areamax]是停止無(wú)人機(jī)水平移動(dòng)的高度h=1 m所計(jì)算的塊區(qū)域像素為3 000,此參數(shù)根據(jù)設(shè)置返航的高度,人為計(jì)算調(diào)整。表1為無(wú)人機(jī)的降落點(diǎn)誤差對(duì)比。
圖5中,5列分別對(duì)應(yīng)第30幀,117幀,180幀,260幀,420幀圖像,圖中的a~d分別對(duì)應(yīng)原始視頻幀、背景幀、前景幀、追蹤結(jié)果幀。由表1可知,在高度50 m及以下高度,無(wú)人機(jī)的降落半徑可以達(dá)到半徑0.5 m之內(nèi),相比于GPS誤差半徑1.5 m降落精度提高。高度大于50 m時(shí),由于無(wú)人機(jī)在圖像中基本屬于一個(gè)點(diǎn)狀形態(tài),噪音影響嚴(yán)重,無(wú)法準(zhǔn)確用圖像捕獲無(wú)人機(jī),測(cè)出的降落半徑其實(shí)是GPS誤差半徑。
4 結(jié) 論
本文提出對(duì)于無(wú)人機(jī)自動(dòng)返航中無(wú)法準(zhǔn)確降落的問(wèn)題,并在解決方案中提出攝像頭靜止,目標(biāo)移動(dòng)的新的想法,利用背景減除算法實(shí)現(xiàn)無(wú)人機(jī)的檢測(cè)并追蹤,控制無(wú)人機(jī)使其降落在攝像頭的位置。實(shí)驗(yàn)表明,本文設(shè)計(jì)的方法能夠穩(wěn)定地追蹤無(wú)人機(jī)并獲得位置信息,當(dāng)設(shè)置返航高度為30 m時(shí),使無(wú)人機(jī)降落的誤差大約為0.5 m,相比GPS定位精度有明顯提升,基本能滿足落在長(zhǎng)寬為0.5 m的停機(jī)坪要求。
參考文獻(xiàn)
[1] 劉軍,王鶴,王秋玲,等.無(wú)人機(jī)遙感技術(shù)在露天礦邊坡測(cè)繪中的應(yīng)用[J].紅外與激光工程,2016,45(z1):111?114.
LIU Jun, WANG He, WANG Qiuling, et al. Application of UAV remote sensing technology in open?pit slope mapping [J]. Infrared and laser engineering, 2016, 45(S1): 111?114.
[2] 臧克,孫永華,李京,等.微型無(wú)人機(jī)遙感系統(tǒng)在汶川地震中的應(yīng)用[J].自然災(zāi)害學(xué)報(bào),2010,19(3):162?166.
ZANG Ke, SUN Yonghua, LI Jing, et al. Application of miniature unmanned aerial vehicle remote sensing system to Wenchuan earthquake [J]. Journal of natural disasters, 2010, 19(3): 162?166.
[3] 井然,鄧?yán)冢w文吉,等.基于可見(jiàn)光植被指數(shù)的面向?qū)ο鬂竦厮脖惶崛》椒╗J].應(yīng)用生態(tài)學(xué)報(bào),2016,27(5):1427?1436.
JING Ran, DENG Lei, ZHAO Wenji, et al. Object?oriented aquatic vegetation extracting approach based on visible vegetation indices [J]. Chinese journal of applied ecology, 2016, 27(5): 1427?1436.
[4] 宋宇,翁新武,郭昕剛.基于光流和慣性導(dǎo)航的小型無(wú)人機(jī)定位方法[J].傳感器與微系統(tǒng),2015,34(1):13?16.
SONG Yu, WENG Xinwu, GUO Xingang. Small UAV localization method based on optical?flow and inertial navigation [J]. Transducer and microsystem technologies, 2015, 34(1): 13?16.
[5] 趙春暉,潘泉,梁彥,等.視頻圖像運(yùn)動(dòng)目標(biāo)分析[M].北京:國(guó)防工業(yè)出版社,2011.
ZHAO Chunhui, PAN Quan, LIANG Yan, et al. Video imagery moving targets analysis [M]. Beijing: National Defense Industry Press, 2011.
[6] 嚴(yán)金果,徐蔚鴻.基于新的幀間差分運(yùn)動(dòng)目標(biāo)檢測(cè)算法[J].計(jì)算機(jī)工程與設(shè)計(jì),2013,34(12):4331?4335.
YAN Jinguo, XU Weihong. Moving object real?time detection algorithm based on new frame difference [J]. Computer engineering and design, 2013, 34(12): 4331?4335.
[7] 陳麗芳,劉淵,須文波.改進(jìn)的歸一互相關(guān)法的灰度圖像模板匹配方法[J].計(jì)算機(jī)工程與應(yīng)用,2011,47(26):181?183.endprint
CHEN Lifang, LIU Yuan, XU Wenbo. Improved normalized correlation method of gray image template matching method [J]. Computer engineering and applications, 2011, 47(26): 181?183.
[8] CHEUNG S C S, KAMATH C. Robust techniques for background subtraction in urban traffic video [C]// Proceedings of Visual Communications and Image Processing. San Jose: SPIE proceedings, 2004, 5308: 881?892.
[9] 紀(jì)運(yùn)紅,張穎,吳慶洪.基于灰度圖像的自適應(yīng)背景模型運(yùn)動(dòng)物體檢測(cè)算法比較研究[J].現(xiàn)代電子技術(shù),2007,30(5):123?127.
JI Yunhong, ZHANG Ying, WU Qinghong. Comparison of moving target detection algorithms using adaptive background models in grayscale image sequences [J]. Modern electronics technique, 2007, 30(5): 123?127.
[10] 康曉晶,吳謹(jǐn).基于高斯背景建模的目標(biāo)檢測(cè)技術(shù)[J].液晶與顯示,2010,25(3):454?459.
KANG Xiaojing, WU Jin. Object detecting technology based on Gauss background modeling [J]. Chinese journal of liquid crystals and displays, 2010, 25(3): 454?459.
[11] MOHAN A S, RESMI R. Video image processing for moving object detection and segmentation using background subtraction [C]// Proceedings of International Conference on Computational Systems and Communications. Trivandrum: IEEE, 2014: 288?292.
[12] GONZALEZ R C, WOODS R E. Digital image processing [M]. New Jersey: Prentice Hall, 2003.endprint
