三維工裝逆向構建數字模型技術研究
2018-03-13 05:39:42程世明李仁花陳志敏劉洋洋雷玉如
教練機 2018年4期
程世明,李仁花,陳志敏,劉洋洋,雷玉如
(航空工業洪都,江西南昌,330024)
0 引言
目前,國內外對模擬量逆向重建CAD模型的研究開發開展了大量的工作。從模擬量逆向重構三維模型的過程來看,包括數據測量采集和幾何模型重構兩個關鍵環節。
1)數據測量采集:工件表面數據采集的方法有多種,可分為接觸式和非接觸式兩大類[1]。然而逆向工程中常用的數據采集方法包括三坐標測量儀、光學方法、CT方法等。光學方法應用廣泛,以激光為光源的三角形法已經走向實用階段,但其不能對具有內腔的物體或一些價格昂貴、不可拆卸的封閉裝配體進行測量[2]。CT方法雖能實現內部結構的測量,但測量精度還比較低,而且設備又極其昂貴。測量設備采集得到的數據通常還難以直接用以重構幾何模型,需要人工干預即經過多視拼接 (Registration)、補全、噪聲濾除、篩減、光順等數據預處理之后,才能用于重構幾何模型。
2)幾何模型重構:CAD系統中的幾何模型由最早的線框模型,發展到曲面模型,再到現在的實體模型和特征模型[3]。三角網格可以看作是一種特殊的線框模型,通常情況下曲面重構和實體模型重構在三角網格基礎上進行;實體模型重構還要利用曲面重構方法,重構實體模型后才能進一步提取特征構建特征模型[4]。著名的商業逆向工程軟件有:美國RainDrop 公司的 Geomagic;EDS 公司的 Surfacer;英國DELCAM公司的CopyCAD;韓國INUS公司開發的RapidForm;國內浙江大學的RE-SOFT等。其功能包括:多視圖拼接、光順、去噪、空洞修補等,在測量點集基礎上構建網格模型、擬合光順曲面等[5]。雖然商用軟件的功能很強大,但其還不能完全識別設計者的意圖,這就需要人工進行操作,比如對曲線的擬合處理時需要根據其曲率分布的不同而采取不同的方法,并且需要開發相應的算法對曲線進行優化使其滿足逼近精度要求[6];在曲面重構時其要求測量數據比較平滑,這一要求在實際測量過程中很難保證,所以需要人工開發相應的算法對采集的數據進行處理。
從上述研究和應用來看,在數控測量儀器設備上國內外均已開展了大量的應用工作,并已取得實效。本文通過對三維工裝實物的測量、掃描數據預處理和建立三維數模的研究,將工裝實物由模擬量轉換成數字模型[7]。
1 三維工裝模擬量逆向構建數字量流程
工裝從三維實物測量到數模歸檔的整個流程主要包括數據采集、數據預處理、模型構造、偏差分析、模具數控加工、修理模具、掃描修理后模具、掃描數據與數模比對及數模歸檔等九個方面,如圖1所示。本文主要研究內容是數據采集、數據預處理、模型構造及偏差分析四部分。
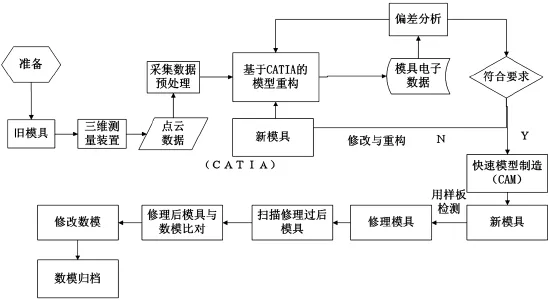
圖1三維實物測量到數模歸檔流程
2 三維工裝模擬量向數字量轉換方法
三維模擬量向數字量轉換是將工裝、工件等三維實物數字化測量得到的三維“點云”數據,通過將該“點云”數據進行處理,得到疏密相間、特征較為齊全能反映實物關鍵特征的點云集合[8];根據曲面的復雜程度采用不同的方法構造曲面,得到能夠支持三維模型重建的特征要素。
2.1 數據采集
對三維模擬量實物進行掃描,通過三維掃描或測量設備測得實物表面的三維點數據集合,即點云。點與點的間距比較大的叫稀疏點云;而點與點數量比較大且比較密集的叫密集點云[9]。將掃描的數據保存為stl格式,名稱為“圖號+CS”。
1)通過接觸式三坐標測量機或非接觸光學掃描儀(自定位手持式掃描儀),沿著三維實物表面掃描,采集模型表面點的坐標值,轉化為數字格式。
2)對于尺寸較大的工件,采用多角度掃描后拼接,然后在掃描系統軟件內進行拼接、整合。
3)對于內部特征較多或局部特征復雜的實物,可以在掃描這些特征時使用顯影劑,進行均勻噴涂后再掃描,獲取較為準確的零件外形特征掃描點云。
2.2 數據預處理
對成形零件進行三維掃描得到由點云數據組成的模型,由于掃描過程中不可避免的會掃描到非零件部分,對點云進行處理,去除噪點,進行過濾篩選和數據修補,在提高設計效率的同時保證結果的準確性。
1)噪點去除:在掃描數據的主體特征外圍,有明顯的無用點,如孤點和離群點,將其手動去除;同時在零件的大開口特征中,也有一些無用點,一并將其去掉,最終得到較為“干凈”的點云數據集合。將數據導入CAD或逆向分析軟件,如CATIA DSE模塊或Geomagic studio軟件,以人機交互的方式予以去除,如圖2所示。
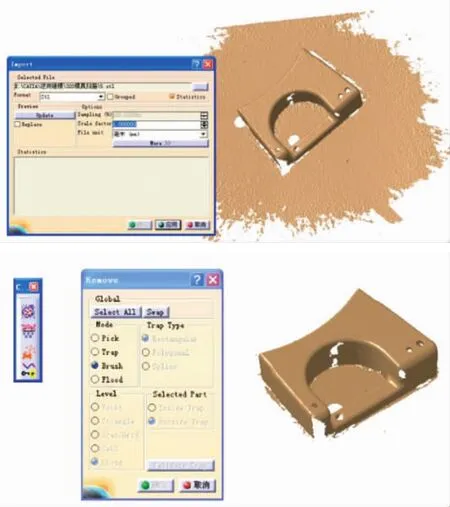
圖2導入掃描點云數據和刪除多余點云
2)點云篩選:曲面掃描生成的點云一般質量較高,點云密集、數量多,通過精簡一部分來提高軟件的運算效率,如圖3、4所示。不同類型的“點云”可采用不同的精簡方式:①散亂點云可通過隨機采樣的方法來精簡;②網格化點云采用等分布密度法進行點云精簡。③依據類型分為平均、高斯和中值,可選擇和設置不同的參數如過濾尺寸、過濾區域等來操作。
通過分析飛機復雜曲面的形狀、部件的裝配關系、實物上的缺陷等進行區域劃分,對三維點云的篩選原則如下:①通過對曲率變化大的曲面保留大量有效的點云來約束形狀;②對有切實裝配關系的地方在去除緊固件的干擾后,著力保證裝配貼合面的原始外形的高精度;③對缺陷保留關鍵特征,其余刪除以備后期正向設計補全,最終完成密度合理、要素齊全、傳遞失真較小的點云集。
3)數據修補:對于因測量設備或不可抗因素,如在光學測量中被測實物被安裝夾緊工裝所遮擋、實物零件特征復雜或自帶缺陷等,造成掃描數據的失真或不能客觀反應被測實物的特征,在點云數據上表現為存在空洞或局部特征表達不夠完整,可比照零件圖紙和其他具有配合關系的數據,對點云數據進行修補,能夠更為高精度的實現后續的型面構建操作,如圖5所示。
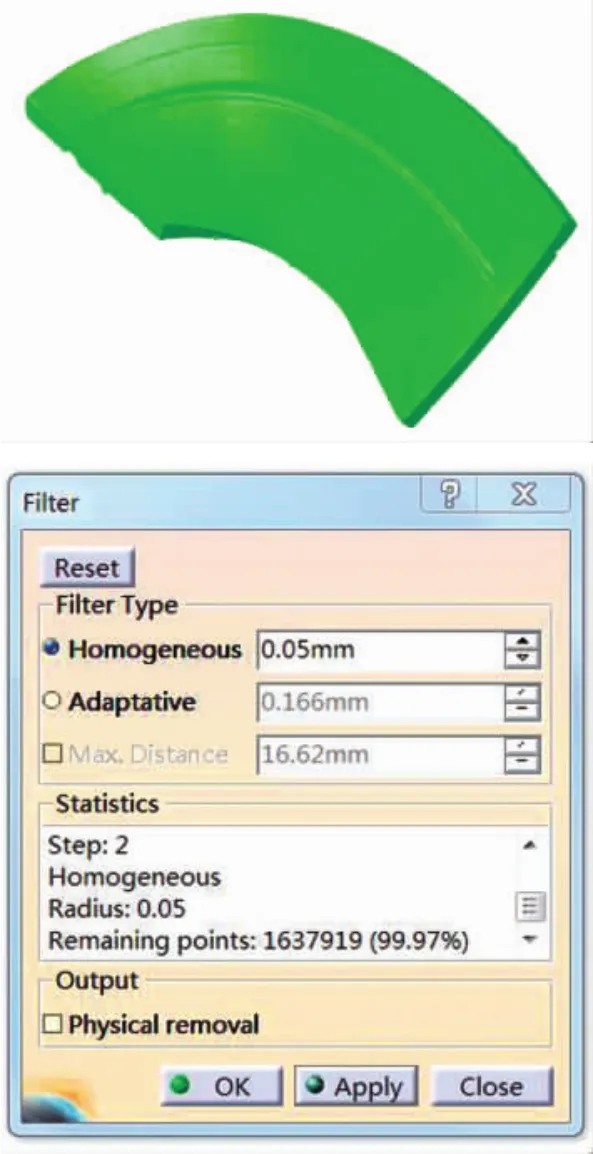
圖3初始163萬個點云圖
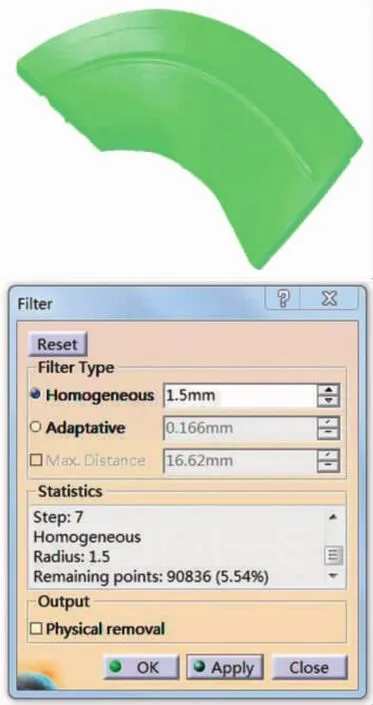
圖4篩選后9萬個點云圖
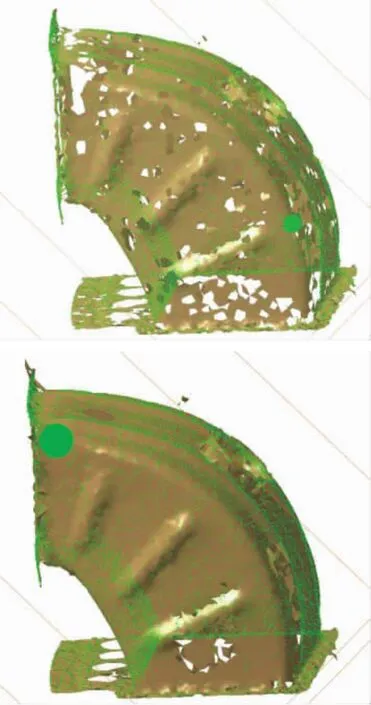
圖5對點云源數據進行數據差值前后的對比
2.3 模型構造
以關鍵特征為基礎,提取點云數據的幾何約束,完成曲面分割、構造和拼接,再輔以實體特征布爾融合等操作,完成從模擬量向數字量曲面或實體特征的轉換。
1)通過按照實物關鍵特征對點云進行分割后構造曲面,根據曲面的復雜程度有兩種方法:簡單外形面構造和復雜外形面構造。
2)通過延伸插值修補生成多個子曲面,然后將子曲面光順擬合形成大曲面。
3)對子曲面的分片連續,通過特征劃分為若干個四邊界區域,在每個區域生成面片,在輔以適當的過渡元素,如引導曲線或過渡曲面,然后施行拼接操作。
4)與原實物點云數據進行誤差分析,在保證公差的情況下盡可能光順,以構造滿足工程要求的高品質外形曲面模型。對于舊零件模擬量轉換為數字量的曲面重建,包含了其制造誤差、缺陷或者掃描誤差等,精準度不僅在于與原實物零件的一致性,也要保證裝配質量。
特別是對于與外形相關的結構件 (與蒙皮直接裝配),如果只追求完全與實物工件一致,將其制造誤差、缺陷或者掃描誤差等帶到建模中,可以適當擴大偏差分析時的協調對象,引入飛機理論外形數據進行協調比對,減小實際應用時的誤差。
5)重建的零件模型轉化為通用數字格式,以滿足工藝制定、數控加工、模擬仿真、強度疲勞校核等應用的需求。
2.3.1簡單外形面的構建過程
當工件外形面之間的界面明顯,多數以規則平面或曲面為主時,采取逐步構建單個面的方法,獲取整個外形面,然后將其修剪成封閉曲面。
1)工件的頂面、底面、側面是明顯的平面,切換到QSR模塊,采用Basic Surface Recognition命令中的Plane選項構建平面,如圖6所示。
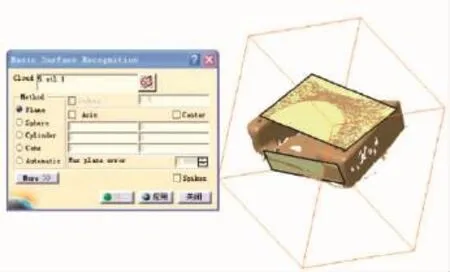
圖6構建平面
2)對于工件類似球面的部分,采用Basic Surface Recognition命令中的Sphere選項構建球面,如圖7所示。
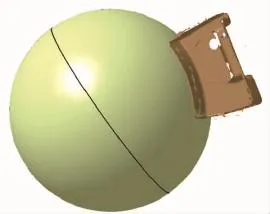
圖7構建球面
3)切換到GSD模塊,采用外插延伸命令把得到的平面延伸放大,如圖8所示。
4)采用聯合修剪命令將外插延伸面,球面修剪得到零件的粗略表面,再進行接合,如圖9所示。
5)用Planar Sections命令,構建工件內部凹槽scan線,如圖10所示。
6)用Curve from Scan命令,得到零件內部凹槽的輪廓線,如圖11所示。
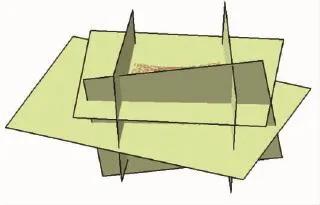
圖8外插延伸平面
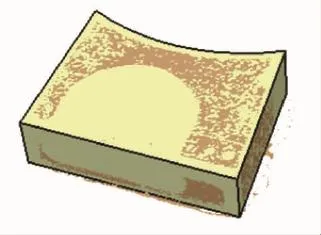
圖9工件粗略外表面

圖10構建scan線
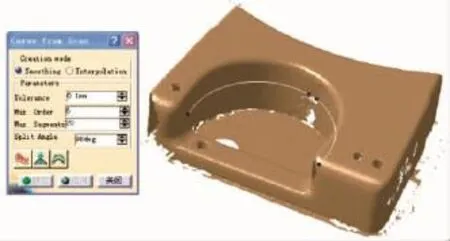
圖11凹槽輪廓線
7)使用拉伸命令,得到零件內部凹槽的輪廓面,如圖12所示。
8)重復使用(5)(6)(7)步驟,得到零件其它面,再使用修剪命令,得到零件外形輪廓面后,用封閉曲面命令,把零件面轉成實體,如圖13所示。
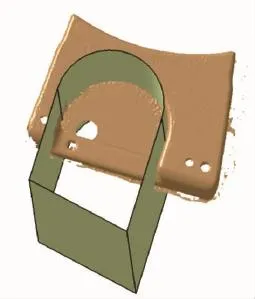
圖12凹槽輪廓面
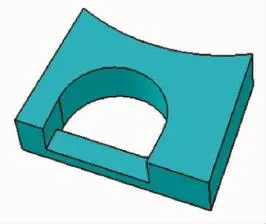
圖13封閉曲面
9)最后使用孔,倒角命令作最后處理,如圖14所示。
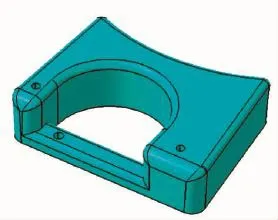
圖14逆向模型
2.3.2復雜外形面的構建過程
對于外形復雜、曲面為主的零件,多以特征線創建為出發點,逐步構建曲面的方式進行逆向構建。
1)點云劃分:對于飛機外形復雜曲面,分析點云的整體和局部特征,如圖15所示,對局部特征較為復雜的部位獨立劃分。通過分片切割將外形數據點云中的具有相鄰空間位置關系、相近幾何特征的點云進行劃分,以進行后續的模型構造。
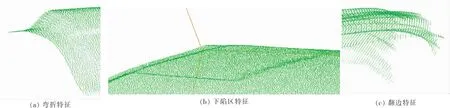
圖15點云中的特征示例
2)擬合曲線
①在CATIA中使用Planar Sections命令,使用一組平面與點云相交,沿著截面曲線獲取點云切片,如圖16所示。
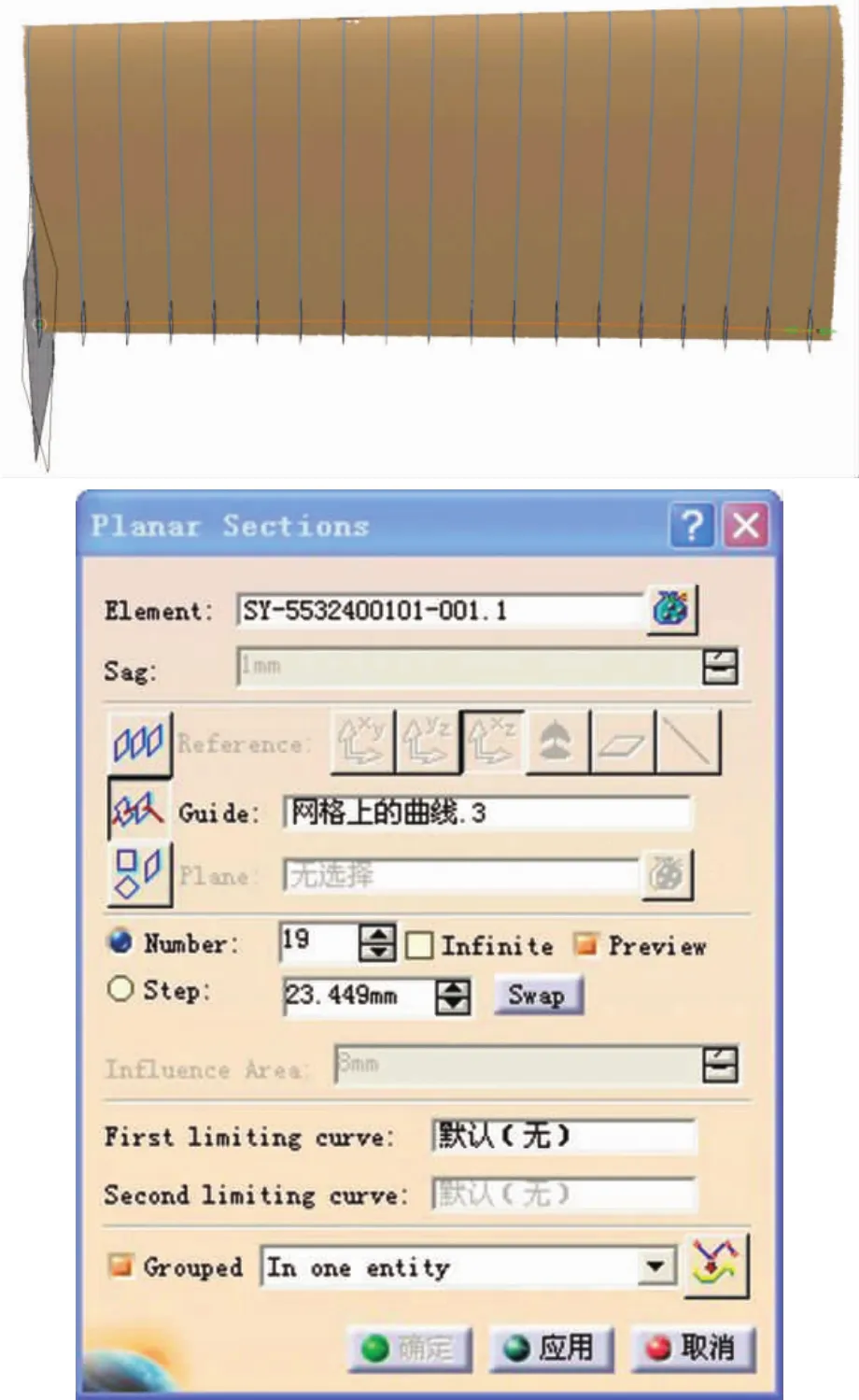
圖16獲得平面點云
② 在CATIA中使用Curve form Scan命令,使用一個平面與點云相交生成的多個點,擬合成為一條完整的B樣條曲線,在擬合過程中通過選擇Smoothing模式、0.1mm的公差,提高擬合精度,如圖17所示。
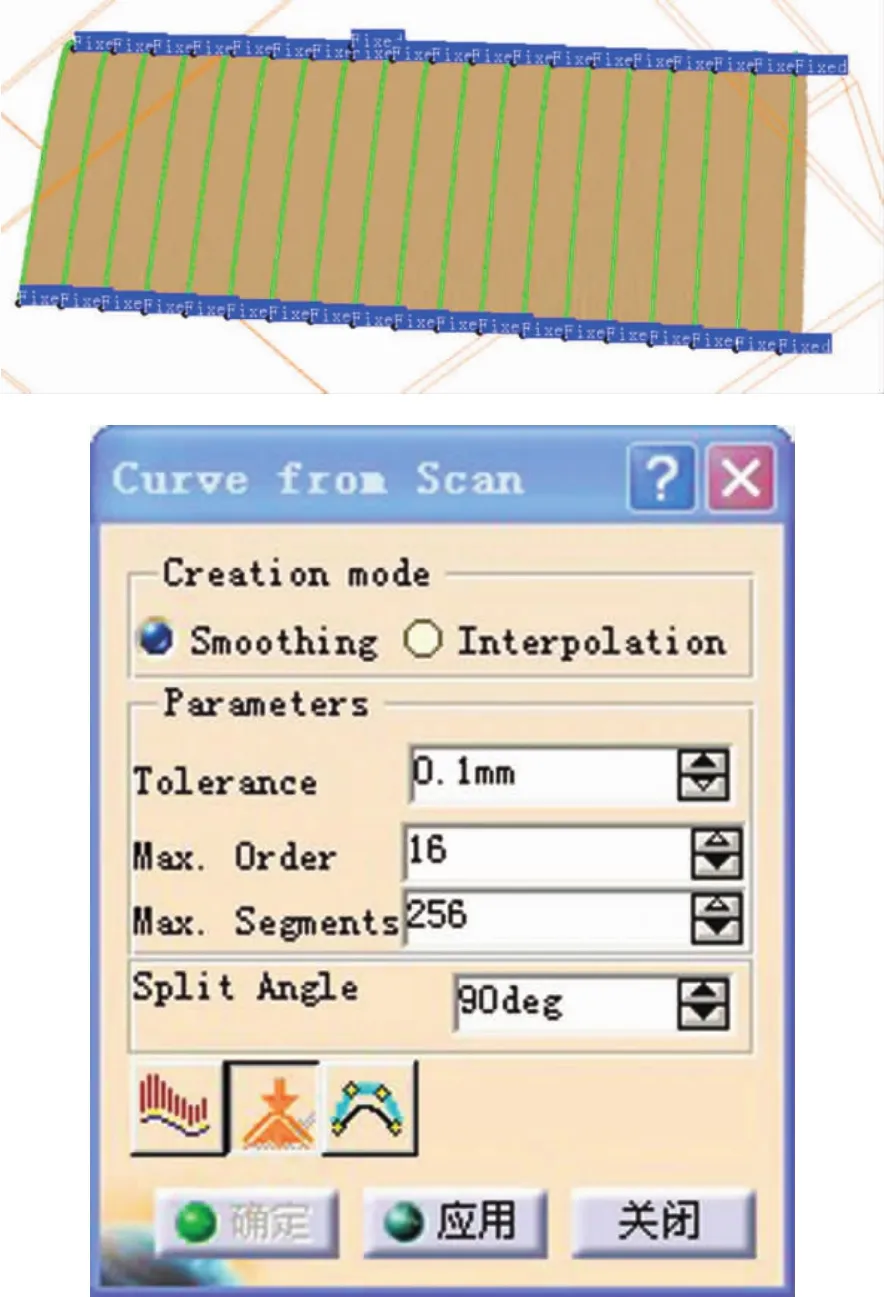
圖17 擬合曲線【重新取圖】
③對曲線進行逐條光順優化,在滿足公差范圍的情況下,調整各連接點的曲率變化,直至生成連續、光滑的骨干樣條曲線,且優化前后偏差控制在0.01mm之內,如圖18所示。
曲線光順操作可分三步進行:
(a)找壞點:將找到的對曲線曲率和精度影響巨大的點挑出,可以修改其坐標值繼續使用或直接刪除。
(b)粗光順:通過CATIA軟件中曲率分析工具的輔助,調整構成曲線的各點,確保曲線各段單凸或單凹,方向統一。
(c)精光順:通過CATIA軟件中曲率分析工具的輔助,如有必要可將部分粗光順生成的曲線截斷,對局部進行曲率優化,將多段擬合曲線連接生成完整的曲線,達到曲率變化均勻、曲線精度符合要求。
3)曲面擬合、光順和拼接
①用擬合曲線進行掃掠或搭線架網格生成子曲面。使用Multi-Sections Surface Definition命令進行多截面生成操作,通過在命令中使用引導線、對齊點特征等命令提高生成的曲面的精度,如圖19所示。
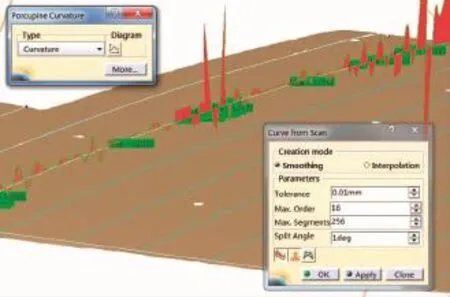
圖18 0.01mm公差下的曲率對比

圖19多截面生成曲面操作
在CATIA軟件的曲面分析工具下,曲面不能有局部變化明顯的凸凹區,使曲面達到光順要求。首先,可光順曲面的U向曲線,光順完畢后,通過新的點生成新V向樣條曲線并光順,直至所有的U、V兩個方向的曲面網格構造曲線都滿足曲線光順要求后,利用新U、V兩個方向的曲面網格構造曲線構造出光順的復雜曲面。通過CATIA的曲面分析工具對構成曲面的網格點的直觀顯示來判斷曲面的光順程度,如圖20所示。
②構造出光順的子曲面后,對各子曲面進行拼接形成復雜曲面。首先要保證相鄰子曲面的邊界連續,然后還要實現連續部分的光順。通過拼接,迭代光順修型后的曲面,如圖21所示。
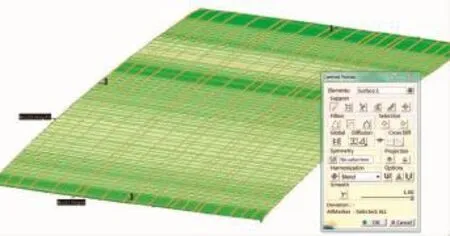
圖20曲面光順質量的網格點分析
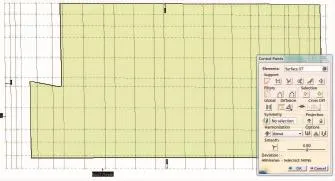
圖21拼接迭代修型后曲面的網格點分析
4)曲面評價
通過將生成的曲面和原始點云數據比對,檢查生成曲面的誤差;也可以檢查生成曲面的光順性及連續性。在必要的時候可對曲面分片操作,通過多片光滑過渡拼接折衷的方式,得到高精度且光順的最終擬合曲面。
5)實體建模
根據曲面,再輔以實際測量的尺寸形位數據,必要時加入改進設計的要求,利用三維建模軟件CATIA完成實體零件的三維數字化模型的建立。
2.4 偏差分析
對于舊零件模擬量轉換為數字量的曲面重建,包含了其制造誤差、缺陷或者掃描誤差等,精準度不僅要求與原實物零件的一致性,也要保證裝配質量。
1)將逆向構建零件的表面與點云數據進行同坐標系下比對,通過距離分析等工具,讓不同的距離顯示不同的顏色,并通過人機交互功能,更為直觀的判斷兩者的具體距離偏差。特別是對其中紅色的部分要著重比對,如有必要可以將那一部分單獨裁減后重新擬合曲面,直到結果能夠滿足零件精度要求,如圖22所示。
2)在保證曲面質量的前提下,充分考慮制造工藝和零件之間的配合面問題,確保間隙在合理公差允許的范圍內,并且均勻一致。
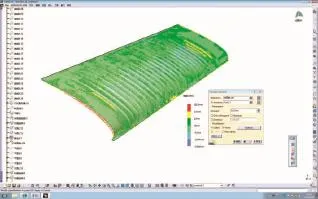
圖22點云與完成結果進行對比
3 結語
面向老機型中模具模擬量向數字量的轉換,通過激光掃描設備掃描模型得到模型點云數據,使用逆向重構技術,重新建立三維模型。結果表明:重構模型能夠接近現有模擬量數據定義,并滿足制造精度要求,從而建立原飛機零件、工裝的數字化模型。本文還提出了一套以輪廓線組重構三維曲面的技術,研究了在測量數據構成的三角網格基礎上對三維模型重構的方法,實現了不同曲線的快速空間變換、保證了不同曲面擬合為一個曲面的精準性。同時,還提升了逆向工程設計技術水平。該技術研究方法為培養既掌握最新的工藝數模建模技術、又掌握科研方法的技術骨干人員,共同形成企業技術能力提供了幫助。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19
