微型車線控轉(zhuǎn)向系統(tǒng)的研究
2018-03-12 06:09:17
福建質(zhì)量管理 2018年4期
關(guān)鍵詞:系統(tǒng)
(北京信息科技大學(xué) 北京 100192)
一、引言
汽車工業(yè)發(fā)展至今的百余年里,控制技術(shù)在不斷的進(jìn)步[1],在一定程度上反映了汽車的工業(yè)水平[2]。自動駕駛汽車開始出現(xiàn)在人們的視野中。而在自動駕駛車輛轉(zhuǎn)向過程中,方向盤依然隨著轉(zhuǎn)向柱在旋轉(zhuǎn)。在高級駕駛輔助系統(tǒng)(ADAS)和自動駕駛技術(shù)飛速發(fā)展的今天,若要讓轉(zhuǎn)向系統(tǒng)集成到整車控制、聽從中央處理器的指揮,則勢必要拋棄這種傳統(tǒng)的機(jī)械連接,加入智能的處理器和執(zhí)行器以精準(zhǔn)地、安全地控制轉(zhuǎn)向的力度和角度。
本文在系統(tǒng)仿真的基礎(chǔ)上,完成了微型車線控轉(zhuǎn)向系統(tǒng)的硬件改造和控制策略設(shè)計,利用PID算法控制轉(zhuǎn)向電機(jī)電流,并對微型車實車試驗結(jié)果進(jìn)行了分析。
二、線控轉(zhuǎn)向系統(tǒng)結(jié)構(gòu)與建模
(一)線控轉(zhuǎn)向系統(tǒng)結(jié)構(gòu)
線控轉(zhuǎn)向系統(tǒng)是由轉(zhuǎn)向盤總成、轉(zhuǎn)向執(zhí)行總成、轉(zhuǎn)向控制器以及容錯系統(tǒng)、汽車總線網(wǎng)絡(luò)和車載電源等輔助系統(tǒng)組成[3],圖1為線控轉(zhuǎn)向原理示意圖。線控轉(zhuǎn)向系統(tǒng)摒棄了轉(zhuǎn)向柱萬向節(jié)等部件,改為電信號總線技術(shù)傳輸控制信息。駕駛員轉(zhuǎn)動方向盤,安裝在方向盤部位的轉(zhuǎn)角傳感器將轉(zhuǎn)角信息輸入到轉(zhuǎn)向控制器中,控制器結(jié)合當(dāng)前車速、橫擺角速度、質(zhì)心側(cè)偏角等車輛狀態(tài)信息計算出適合當(dāng)前汽車運行狀態(tài)的轉(zhuǎn)向傳動比作為理想轉(zhuǎn)向傳動比,控制器按照設(shè)計好的控制策略計算出轉(zhuǎn)向執(zhí)行電機(jī)需要的電流,轉(zhuǎn)向執(zhí)行電機(jī)連接轉(zhuǎn)向器,經(jīng)過轉(zhuǎn)向執(zhí)行機(jī)構(gòu)使前輪轉(zhuǎn)向,達(dá)到駕駛員希望轉(zhuǎn)過的角度,前輪轉(zhuǎn)角傳感器將當(dāng)前轉(zhuǎn)角信息反饋給控制器,形成閉環(huán)控制。線控轉(zhuǎn)向系統(tǒng)原理圖如圖1。
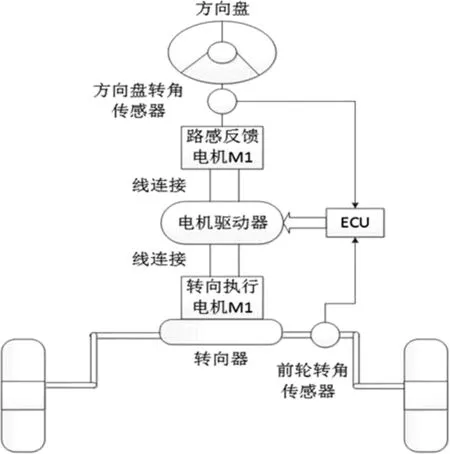
圖1 線控轉(zhuǎn)向原理圖
(二)線控轉(zhuǎn)向系統(tǒng)建模
方向盤系統(tǒng)模型:
(1)
(2)
(3)
轉(zhuǎn)向執(zhí)行電機(jī)模型:
(4)
式中Js為轉(zhuǎn)向盤子系統(tǒng)等效到轉(zhuǎn)向柱的轉(zhuǎn)動慣量;θh為轉(zhuǎn)向盤轉(zhuǎn)角,Cs為轉(zhuǎn)向盤子系統(tǒng)等效到轉(zhuǎn)向柱的阻尼系數(shù);Th為轉(zhuǎn)向盤轉(zhuǎn)矩;Tsm為路感電機(jī)轉(zhuǎn)矩;Gsm為路感電機(jī)減速器傳動比;Jf為前輪子系統(tǒng)等效到前輪轉(zhuǎn)向銷的轉(zhuǎn)動慣量;Cf為前輪子系統(tǒng)等效到前輪轉(zhuǎn)向銷的阻尼系數(shù);Tfm為前輪轉(zhuǎn)向電機(jī)轉(zhuǎn)矩;Ta為前輪的回正力矩;θf前輪轉(zhuǎn)角;Jfm為前輪轉(zhuǎn)向電機(jī)轉(zhuǎn)動慣量;θfm為前輪轉(zhuǎn)向電機(jī)轉(zhuǎn)角;Cfm為電機(jī)軸阻尼系數(shù);Tfm為前輪轉(zhuǎn)向電機(jī)轉(zhuǎn)矩;Gs為齒輪齒條轉(zhuǎn)向器傳動比;Gfm前輪轉(zhuǎn)向電機(jī)減速器傳動比;d為輪胎氣壓拖距與輪胎機(jī)械拖距之和,視為一定值;v為側(cè)向速度;u為車輛汽車前進(jìn)速度;k1為前輪側(cè)偏剛度;ke電動勢常數(shù)。
根據(jù)上述微分方程建立Simulink模型,結(jié)合微型試驗車的整車參數(shù),建立CarSim整車模型。控制框圖如圖2所示。

圖2 控制框圖
三、理想傳動比的設(shè)計
在傳統(tǒng)的機(jī)械轉(zhuǎn)向系統(tǒng)中,轉(zhuǎn)向系統(tǒng)的總傳動比為:
(6)
傳動比i由機(jī)械系統(tǒng)決定。傳動比是操縱性中的轉(zhuǎn)向特性和轉(zhuǎn)向盤力特性,以及穩(wěn)定性方面的直線行駛路徑保持性的影響因素[7]。對于微型試驗車原轉(zhuǎn)向系統(tǒng)而言,i為定值。試驗車的穩(wěn)態(tài)橫擺角速度增益[7]如下所示:
(7)

圖3 橫擺速度增益與車速關(guān)系
通過仿真如圖可以看出,汽車的穩(wěn)態(tài)橫擺角速度增益會隨著車速的增大呈現(xiàn)先增大后減小的趨勢,在對試驗車的設(shè)計之中,因為試驗車的最高車速小于60km/h,故橫擺角速度增益會隨著車速的增加而增大。這就要求試驗車在低速時具有較小的傳動比,中高速時需要較大的傳動比。從而減小駕駛員的操縱負(fù)擔(dān),使車輛橫擺角速度系統(tǒng)增益穩(wěn)定為一常數(shù),提高行駛安全性。
本文基于期望的橫擺角速度增益為一定值,設(shè)計了微型試驗車的傳動比,如式(8)(9)。
(8)
(9)
微型試驗車的最高時速為50km/h,為方便研究,以時速10km/h為界限,劃定了試驗車的低速區(qū)和高速區(qū)。低速狀態(tài)下,試驗車傳動比為一定值,前輪最大轉(zhuǎn)向角度為30°,令i=6,方向盤轉(zhuǎn)動角度為±180°,方向盤由左極限位置到右極限位置打滿一圈即可實現(xiàn)前輪由左極限角度轉(zhuǎn)到右極限角度,保證輕便性的同時,大大提高了轉(zhuǎn)向靈活性,可方便駕駛員停車移位;高速狀態(tài)下為可變傳動比,即式(10)。

(10)
四、線控轉(zhuǎn)向系統(tǒng)控制策略的設(shè)計
線控轉(zhuǎn)向系統(tǒng)雖然實現(xiàn)了傳動比的自由設(shè)置,但是要使前轉(zhuǎn)向輪按照轉(zhuǎn)向盤轉(zhuǎn)角和可變傳動比決定的期望前輪轉(zhuǎn)角進(jìn)行準(zhǔn)確的轉(zhuǎn)向,需要對前輪電機(jī)進(jìn)行適當(dāng)?shù)奈恢每刂疲M(jìn)而保證前輪轉(zhuǎn)動角度的精確性。安裝在方向盤下方的轉(zhuǎn)角傳感器,輸出的信息為方向盤目標(biāo)轉(zhuǎn)角,把目標(biāo)轉(zhuǎn)角和角度傳感器輸出的實際轉(zhuǎn)角的差值作為線控轉(zhuǎn)向系統(tǒng)控制器的輸入,控制器結(jié)合車輛當(dāng)前的車速和其他參數(shù)調(diào)整電機(jī)的電流和占空比,來控制轉(zhuǎn)向執(zhí)行電機(jī),從而達(dá)到駕駛員希望轉(zhuǎn)動的角度。
在過程控制中,按偏差的比例、積分和微分進(jìn)行控制的PID控制器是應(yīng)用最為廣泛的一種自動控制器[7]。針對本線控轉(zhuǎn)向系統(tǒng),采用了應(yīng)用普遍的PID算法。經(jīng)過在線調(diào)整,系統(tǒng)響應(yīng)效果較好,本設(shè)計確定KP、KI、KD參數(shù)分別為12、0.005、0.06。
五、實驗結(jié)果分析
將設(shè)計好的傳動比和PID控制算法用C語言編寫成控制程序,通過Keil軟件將程序?qū)懭隨TM32F103單片機(jī)中,用12V鉛酸蓄電池轉(zhuǎn)角傳感器、控制器、轉(zhuǎn)向電機(jī)和實驗設(shè)備供電供電,控制器對應(yīng)引腳連接電機(jī)驅(qū)動器,電機(jī)驅(qū)動器連接轉(zhuǎn)向執(zhí)行電機(jī)和路感電機(jī)。用Racelogic公司的V-BOX3來檢測車輛的速度和橫擺角速度等信息。用RMS公司的測力方向盤、DEWE數(shù)據(jù)采集儀采集方向盤轉(zhuǎn)角和轉(zhuǎn)矩信息。在混凝土路面,車速保持20km/h,在1s時間內(nèi),通過DEWE實時顯示系統(tǒng),方向盤轉(zhuǎn)過20°,進(jìn)行試驗[8][9]。實驗結(jié)果如圖4所示。

圖4 橫擺角速度隨時間變化曲線

圖5 方向盤角階躍輸入

圖6 方向盤轉(zhuǎn)矩與時間關(guān)系
經(jīng)過時速20/km,30km/h,40km/h情況下的方向盤角階躍輸入試驗,可以看出試驗車的橫擺角速度穩(wěn)定在合理范圍之內(nèi),能夠快速響應(yīng)轉(zhuǎn)向需求,在中高速時,系統(tǒng)穩(wěn)定時間較低速時更快。經(jīng)過計算,橫擺角速度增益穩(wěn)定在0.4左右。同時,轉(zhuǎn)向盤輸入轉(zhuǎn)矩大小明顯降低,提高了轉(zhuǎn)向輕便性,減小了駕駛員操作負(fù)擔(dān)。
六、結(jié)論
本文運用Matlab/Simulink與CarSim軟件對線控轉(zhuǎn)向系統(tǒng)進(jìn)行了聯(lián)合仿真,針對微型車原有機(jī)械轉(zhuǎn)向系統(tǒng)進(jìn)行了改造,設(shè)計了轉(zhuǎn)向控制策略,并進(jìn)行了試驗。試驗結(jié)果表明,改造后的微型車轉(zhuǎn)向系統(tǒng),響應(yīng)快速,操縱穩(wěn)定性提高,轉(zhuǎn)向輕便性更好,同時為整車線控化平臺的搭建提供了較好的工程意義。
[1]周聰,肖建.汽車線控轉(zhuǎn)向系統(tǒng)的研究現(xiàn)狀與發(fā)展[J].控制工程,2012,(5):827-831.
[2]王祥.汽車線控轉(zhuǎn)向系統(tǒng)雙向控制及變傳動比特性研究[D].吉林大學(xué),2013.
[3]倪常斌.汽車線控轉(zhuǎn)向系統(tǒng)建模與控制策略研究[D].東北大學(xué).2011.
[4]余志生.汽車?yán)碚揫M].北京:機(jī)械工業(yè)出版社 2000
[5]Christopher D.Gadda,Shad M.Laws and J.Chritian Gerdes.Generating Diagnostic Residuals for Steer-by-Wire Vehicles[J].IEEE Transactions on Control Systems Technology,2007,15(3):529-540.
[6]Andrew Heathershaw.Optimizing Variable Ratio Steering for Improved On-Centre Sensitivityand Cornering Control.SAE Paper 2000-01-0821,2000.
[7]張靜.MATLAB 在控制系統(tǒng)中的應(yīng)用[M].合肥:中國科學(xué)技術(shù)大學(xué)出版社,2001
[8]王長青.乘用車中心區(qū)操縱穩(wěn)定性客觀評價指標(biāo)體系研究[D].吉林大學(xué),2012.
[9]GB 6323.2—94.汽車操縱穩(wěn)定性試驗方法——轉(zhuǎn)向瞬態(tài)響應(yīng)試驗(轉(zhuǎn)向盤轉(zhuǎn)角階躍輸入).[S].天津:全國汽車技術(shù)標(biāo)準(zhǔn)化委員會,1994.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
