鼠類腦細胞導航機理的移動機器人仿生SLAM綜述
2018-03-12 01:45:01陳孟元
智能系統學報 2018年1期
陳孟元
(1. 安徽工程大學 安徽省電氣傳動與控制重點實驗室,安徽 蕪湖 241000; 2. 中國科學技術大學 精密機械與精密儀器系,安徽 合肥 230027)
從簡單重復的勞動中解放出來一直是人類追求的夢想,也是人類創造發明機器人的主要目的之一。機器人可移動性可以進一步擴大其使用范圍并能更好地提高其使用效率,但移動機器人在復雜環境中如何模仿人類進行自我導航和路徑規劃一直是難以解決的問題。
20世紀七八十年代,隨著人類智能和移動機器人的出現,人類將兩者進行了有效地關聯并開始了有益地探索,人工智能領域進入了一個蓬勃發展的新時代。進入21世紀后,被定義為研究感知與行動之間智能連接的移動機器人學被賦予了更多的內涵,隨著工業的發展,移動機器人正在從事工業制造、生活家居、通信運輸工作,甚至對空間以及深海進行探索,可以說,移動機器人的出現改變了人們的生活,對社會發展的各個方面產生了巨大的影響,為先進技術的發展與社會的進步做出了有益的貢獻。
移動機器人在短短幾十年間經過了突飛猛進的發展,能夠較好地代替人們完成重復性和危險性的勞動,減輕人們的工作強度和危險性,提高生產效率。而同步定位與地圖構建(SLAM)問題一直是限制移動機器人在復雜環境下應用的關鍵原因,移動機器人在沒有提前預設好行進路線的陌生環境中需要主動了解實際環境中的路況信息和障礙物的實際位置,同時精確地進行移動機器人自身的定位與實際環境的地圖構建。現階段,移動機器人主要采用自身攜帶的各種圖像采集、陀螺儀、加速度計等先進傳感器,通過激光測距、超聲測距以及圖像匹配完成SLAM工作。
傳感器在實際環境中的測量值有可能是錯誤的,例如,利用激光照射玻璃墻,激光光束可能已經經過了多次反射才反射回探測器。圖像采集傳感器也有其局限性,例如,普通照相機在區分圖像標準色方面效果較差,若采用黑白色的灰度方式表示圖像,光線強度的變化又很難表現出來,若采用全景相機或廣角鏡頭采集圖像,采集到的圖像又會產生畸變。另一方面,即使傳感器測量值是正確的,但總存在難以克服的精度問題。以測距和圖像匹配方法實現SLAM為例,雖然傳感器具有較高精度,可以通過輪子上安裝的里程計準確測量機器人的移動距離,但由于路面不平坦和輪子滑動等原因,傳感器測量結果不能準確反映機器人的實際移動距離,并且隨著移動機器人工作時間的推移累積誤差也在不斷疊加,這也是不能忽略的重要方面。因此科學家開始尋找更加可靠的定位導航方式。
1 鼠類相關導航腦細胞
當人類還處于原始社會時就已經意識到“飛鴿傳書,老馬識途”。一些動物具有出類拔萃的導向能力,無論陰晴雨雪,縱使萬水千山,這些動物總能知道路在何方,準確找到目的地。經過多年的研究,2014年諾貝爾生理學或醫學獎獲得者發現了基于動物導航機制的大腦定位系統細胞。
像人們熟知的GPS系統一樣,大腦定位系統也是通過采集自身運動的時間、位置信息進行定位導航的。秀麗隱桿線蟲僅有幾百個神經細胞,卻可以通過追尋環境中的嗅覺信號來判斷方向。對于螞蟻和蜜蜂等神經系統更為復雜的動物,它們利用神經細胞實時監測自身的運動方向和速度變化,通過路徑整合獲得當前所在的位置。這種方法使得動物僅依靠自身神經系統進行導航。
哺乳類動物辨識方向的方法更為先進。人類作為高級的哺乳動物由于受到倫理的約束無法進行大量的實驗研究。與人較為接近的哺乳動物,如猩猩、狒狒等,由于數量和國家保護的因素一般也不選用。在生物地圖構建和導航領域,人們通常選用哺乳綱中的鼠類動物作為實驗模型,由于實驗環境和場合廣泛,為研究動物的導航性能奠定了良好的基礎。此外,鼠類大腦也是動物研究領域使用最多的一塊區域。
大腦中不同的神經細胞由于受到刺激產生興奮導致膜電位的變化,這些同時產生興奮的神經細胞所組成的圖案恰能反映外界環境的空間布局和自身在環境中所處的位置[1]。鼠類大腦中存在3種主要導航細胞:位置細胞、頭方向細胞以及網格細胞。其中,位置細胞繪制所處地點的地圖;頭方向細胞指明方向(將位置細胞和頭方向細胞合并形成的一個新細胞類型,位姿細胞);網格細胞通過標記被激活細胞的位置對場景進行重定位。此外,在內嗅皮層還存在邊界細胞、速度細胞等能夠進行輔助導航的細胞,如圖1所示。

圖 1 海馬體和內嗅皮質構成的系統生物模型Fig. 1 Biological model consist of hippocampus and entorhinal cortex
在哺乳類動物中樞神經系統的大腦皮質中,存在一種形狀類似于海馬,功能上負責短期記憶儲存和學習的區域,被稱為海馬體。在日常中的一個記憶片段,比如一個電話號碼在短時間內被重復提及,經過海馬體可以將其轉存入大腦皮層,成為永久記憶。1971年倫敦大學學院(university college London)的美國科學家O’Keefe等[2]在海馬腦區發現了一種特殊的神經細胞,這種細胞在鼠類經過空間某特定位置時其中的一些細胞會產生興奮,而經過另一個位置時另一些細胞會產生興奮,他將這種細胞命名為位置細胞。1984年紐約大學的James Ranck等[3]發現一組與動物的方向感知直接相關的神經細胞并命名為頭方向細胞,頭方向細胞能夠辨別頭部的朝向。當頭部朝向北方的時候,一組細胞會興奮;而頭部轉向南方時,另一組細胞興奮,通過這兩種細胞的興奮狀態能夠準確判斷出在某一時間老鼠所處的精確位置。除此之外,內嗅皮質也參與整個信號的傳遞過程,內嗅皮質層從網格細胞處將有關方向和移動距離的信息傳遞給海馬體,如圖2所示。內嗅皮質將關于動物運動的方向和距離信息通過不同的神經通路傳遞至海馬體中的齒狀回(dentate gyrus,DG)、CA3和位置細胞所在的CA1等區域,由此產生的大腦認知地圖可以幫助動物更好地規劃未來的“旅程”。

圖 2 海馬體和內嗅皮層橫截面視圖Fig. 2 Section lateral of hippocampus and entorhinal cortex
老鼠通過各種感官從環境中獲取外界的特征信息,而位置細胞則能夠和海馬體中其他細胞合作,將輸入的特征信息與過往記錄到的特征信息加以比對。一旦信息能夠匹配成功,與匹配位置相對應的特定位置細胞就會變得活躍。通過這種方法,大腦能夠將特定的特征信息與特定的空間位置聯系起來,形成空間位置記憶,再通過與頭方向細胞協作,可以構建位置細胞和頭方向細胞所表征的海馬神經人工模型。圖3表示老鼠在空曠房間的運動軌跡,圓錐形表示老鼠,圓斑表示理論上細胞的活躍位置,圓點表示記錄下的某一批位置細胞活躍時的位置。實驗表明,分離的位置細胞和頭方向細胞所表征的海馬神經人工模型無法長期跟蹤老鼠的位置,而將位置細胞和頭方向細胞合并形成的一個被稱為位姿細胞的新細胞類型則對老鼠起到良好的導航作用。
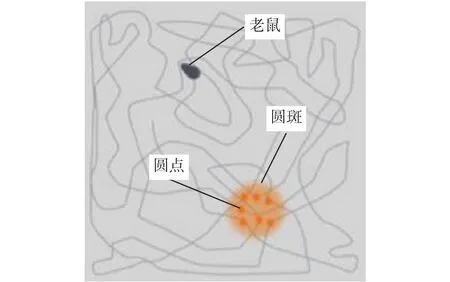
圖 3 老鼠運動軌跡和海馬體位置細胞分布Fig. 3 The trajectory of rats and the distribution of hippocampus
2005年挪威大學科學與技術學院的May-Britt Moser[4-5]在海馬區以外的內嗅皮質的腦區里發現了一種全新的神經細胞并將其命名為網格細胞。圖4為老鼠在空曠房間中運動時,老鼠運動軌跡和某一個網格細胞的活躍位置,可以看出這些被激活細胞的位置呈現均勻六邊形分布。也就是說,任意一個網格細胞的發放場在空間中均勻分布,并且呈現出一種蜂巢式的六邊形網格狀。雖然網格細胞的活躍也和動物所處的位置有關,但是與位置細胞不同,網格細胞的活躍并不依賴于外界輸入的特征信息。

圖 4 老鼠運動軌跡和內嗅皮質網格細胞分布Fig. 4 The trajectory of rats and the distribution of grid cells in entorhinal cortex
2008年,研究者們從內嗅皮質中發現一種新的細胞類型,當動物接近墻壁、圍場邊緣或是其他隔斷時,這些細胞就會放電,這種細胞能夠通過細胞活性計算自身到達邊界的距離,研究者們將其命名為邊界細胞。2015年,在獲得諾貝爾生理學或醫學獎后,May-Britt Moser和Edvard Moser夫婦繼續發現一些神經細胞能夠隨移動速度的提升成比例地提升放電率,通過查看這種細胞的放電頻率便能夠判斷一個動物在給定時間點上的移動速度,研究者們將其命名為速度細胞。
研究表明,在基于鼠類海馬體的移動機器人導航研究基礎上,引入速度細胞能夠更精準的實現移動機器人速度和角度的測量,融合邊界細胞能夠實現突發障礙物等復雜環境的導航[6]。
2 國內外研究現狀及分析
在過去30多年內,對SLAM問題的探索研究大多是基于數學概率的方法,其中最成功的3種概率法為卡爾曼濾波(Kalman filter,KF)算法、最大期望 (expectation maximisation,EM)算法[7]和粒子濾波(particle filter,PF)算法。卡爾曼濾波算法只適用于線性系統,具有很大的局限性;經典的擴展卡爾曼濾波(extended Kalman filter,EKF)[8-9]通過對非線性函數泰勒展開式一階線性化截斷將非線性問題線性化,可以應用于有非線性特征的簡單系統中;無跡卡爾曼濾波(unscented Kalman filter,UKF)[10-11]通過無跡(unscented transformation,UT)變換處理均值和協方差的非線性傳遞,計算精度較高。Arasaratnam等提出的容積卡爾曼濾波(cubature Kalman filter,CKF)算法結構簡單[12],估計精度高,進一步提升了系統的穩定性。粒子濾波也稱為蒙特卡羅定位 (Monte Carlo localisation,MCL)[13-14],這種算法利用帶權重粒子的分布來估算要求的位置分布,故無需考慮后驗分布所帶來的形狀或特征約束。與標準MCL算法一樣,快速同步定位和地圖構建系統(FastSLAM)算法通過粒子濾波器估計機器人路徑下一時刻的位置[15]。這些概率算法的優勢是能夠處理傳感器與環境的模糊性,有很好的SLAM性能,但這些方法是對當前采集到的環境進行數學建模并進行優化,因此不能完全解決全局地圖構建和導航問題。
相比之下,許多生物雖然不具備高精度傳感器,但仍具有較強的導航能力,并且能夠解決全局SLAM問題。因為生物對其地圖的構建依賴于魯棒性處理策略而不是對環境的精確描述,Wehner等[16]發現螞蟻返回蟻穴鄰近區域后,再利用一整套搜索策略找到蟻穴,這種小尺寸和有限復雜度的環境有效降低了地圖構建和導航的難度。但這些成熟的生物學導航算法模型仍具有局限性,例如蟻群算法計算量大、搜索時間長、易陷于局部最優解等問題無法得到有效解決。
擁有海馬體的哺乳動物,如鼠類是人們研究較多的一種動物,人們對其導航、環境探索和真實能力的神經機制也理解得較為深入[17-21]。Skaggs等[22]利用兩套旋轉細胞群,通過Hebbian學習規則校正局部場景細胞和頭方向細胞的連接,頭方向細胞形成的外環是活躍細胞編碼方向,內部兩環是反應角速度的前庭細胞,如圖5所示。Stringer等[23-25]通過頭方向細胞、視覺輸入細胞和前向速度細胞互相激勵來描述位置細胞活性,從而描述環境中物體運動的狀態,如圖6所示。這種包含分離頭方向位置表征系統的海馬神經人工模型,盡管可以支持位置和多方向假設,但由于不能隨時間推移支持多位姿假設,故會造成不完全重定位或重定向,從而導致無法長期跟蹤移動機器人的位置。

圖 5 鼠類頭方向系統的吸引子網絡模型Fig. 5 Attractor network model of head direction system of rats
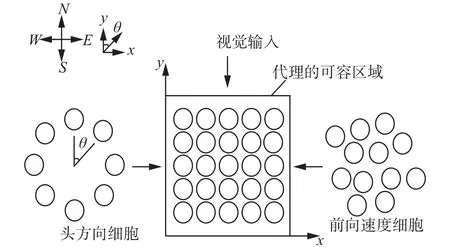
圖 6 位置細胞的二維連續吸引子模型Fig. 6 Two-dimensional continuous attractive model of pose cells
針對上述海馬模型的缺陷,研究者們提出一種基于復合位姿表征的嚙齒動物海馬區擴展模型,將路徑積分和視覺關聯過程集成到位姿細胞模型中,使移動機器人具有更新預測狀態的能力。實驗表明,嚙齒動物海馬區擴展模型對于某一環境產生了穩定的、一致的、具有正確拓撲的地圖,但是面對范圍更廣更復雜的環境導致路徑積分性能下降時,會出現沖突和多重表征兩種附加現象[26-29]。
后人基于此對嚙齒動物海馬區擴展模型進行改進,一種借鑒策略是直接根據移動機器人位姿的核心表征,以及存儲在位姿感知細胞及局部場景細胞網絡中的環境表征對應關系,建立存儲環境空間、視覺、時間、行為和變化等信息的沿途構圖[30-33]。該算法通過同時保留位姿感知細胞地圖拓撲連通性和保持細胞之間的空間信息,解決了非連續、沖突和多重表征這3個問題。Milford等驗證了這種具有環境探索、目標記憶和自適應改變的擴展嚙齒動物海馬區模型能在不同天氣和地形下穩定導航。文獻[34]提出一種新型的基于自組織特征圖的神經網絡模型并將其引入到局部場景細胞,提高了系統的實時性和準確性。文獻[35]通過飛行器進行場景回憶,驗證了沿途構圖算法的可靠性。對于車載導航系統,由于視覺里程計誤差較大,即使通過嚙齒動物海馬區擴展模型仿生機制的修正也仍無法準確導航,張瀟等[36]在此基礎上引入光學雙軸傳感器和MIMU信息,建立了航位推算模型。文獻[37]提出將FAB-MAP(fast appearance-based mapping)引入嚙齒動物海馬區擴展模型的視覺里程計,這種基于歷史模型的閉合檢測算法可以過濾視覺里程計的誤報信息,進一步提高該模型的穩定性,但通過逐個對比當前場景與歷史場景的相似性,實施閉環檢測的方法效率較低,不能滿足系統實時性要求。研究提出的基于實時關鍵幀匹配的閉環檢測模型在保證SLAM穩定的前提下能夠提高閉環檢測實時性。
僅僅依賴純視覺的導航算法并不能適應長時間復雜環境下的導航,研究者們將現有的傳感器技術應用于已知的幾種導航細胞下進行導航。許曈等[38]提出將姿態策略模塊引入嚙齒動物海馬區擴展模型中,對突發障礙物的干擾提出了一個切實可行的建議,Berkvens等[39]將無源 RFID、有源 RFID、WI-FI、地磁傳感器分別引入多組實驗中,結果表明,地磁通量引入的嚙齒動物海馬區擴展模型算法可以明顯減少射頻技術沿途構圖的平均誤差,并在很大程度上確保無錯誤路徑的產生,但仍有問題有待解決,如由于前一時刻定位產生錯誤導致預期位置的錯誤判斷、沿途構圖的平均誤差較大等問題。這些利用現有傳感器來解決移動機器人復雜環境下的導航問題,一方面對傳感器的性能要求較高,另一方面,各類傳感器也會受到復雜環境的干擾。研究提出一種復合鼠類導航細胞模型,融合速度細胞可更精準實現移動機器人速度和旋轉角度的測量,融合邊界細胞以實現突發障礙物的判別。
現有的SLAM理論經過30余年的發展,基于數學概率方法和從距離到拓撲的地圖表征法已經較好地完成了“定位”和“建圖”過程,但都仍然存在一定的局限性。由于實際環境十分復雜,例如光線變化、太陽東升西落、不斷的有人進出等。即使讓一個機器人以5 cm/s的速度在安靜的空間里慢慢移動,這種論文中看起來可行的算法,在實際環境中往往捉襟見肘,處處碰壁,因此,SLAM還未走進人們的實際生活。這種局限性是數學模型本身帶來的,與改進算法無關。因此,在考慮人類能如此輕松地完成導航的基礎上,提出構建一種仿動物大腦細胞導航機制下的同步定位與地圖構建方法。
本研究受到2014年“諾貝爾生理學或醫學獎”啟發,擬將發現的局部場景細胞、位姿細胞(位置細胞、頭方向細胞)、網格細胞、速度細胞、邊界細胞等具有定位導航功能的細胞模型應用于SLAM研究中。分別研究5種導航細胞各自的工作機理和數學表達,然后將這5種導航細胞按照動物導航機制下大腦的工作原理建立數學模型,最終進行實驗驗證。
3 未來深入研究的方法建議
提出一種未來深入研究的方法建議,擬將包含局部場景細胞(view cells)、位姿細胞(pose cells)、網格細胞(grid cells)、速度細胞(speed cells)、邊界細胞(border cells)等具有定位導航功能的鼠類腦細胞模型應用于SLAM研究中,構建一種衍生SLAM算法(BVGSP-SLAM)實現復雜場景下的導航。融入局部場景細胞、位姿細胞和網格細胞模型,盡可能減小光線變化對視覺里程計產生的影響;在此基礎上引入速度細胞和邊界細胞,對突發障礙物和自身速度進行進一步判別。
局部場景細胞獲取當前場景,位姿細胞獲取當前狀態,獲得具有一定導航能力的仿生導航系統VP-SLAM,但這種系統會受到現實場景中人物走動、光線變化等原因造成導航性能下降。為進一步提升系統的魯棒性,融入網格細胞,構建了實時關鍵幀匹配的閉環檢測模型GVP-SLAM,避免因光線變化導致SLAM不穩定,從而既可大幅提高復雜環境下導航的精準性,又具有較好的實時性。在提出帶實時閉環檢測的鼠類導航細胞模型基礎上,引入邊界細胞和速度細胞兩種導航細胞的導航原理,提出一種帶實時閉環檢測的復合鼠類導航細胞模型BVGSP-SLAM。該模型通過融合速度細胞更精準地實現移動機器人速度的測量,避免基于局部場景細胞在突發障礙物影響下的判別失效;通過融合邊界細胞,實現移動機器人對移動障礙物的實時避障,進一步提高了SLAM的穩定性,技術路線圖如圖7所示。
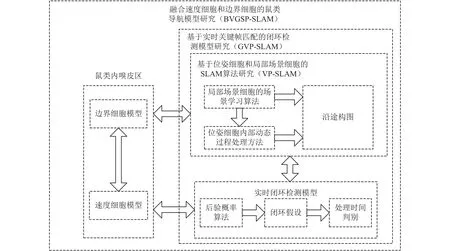
圖 7 融入鼠類腦細胞導航機制的移動機器人衍生SLAM方法技術路線圖Fig. 7 Technology roadmap of derivative SLAM on mobile robots integrated with brain cells of rats
3.1 基于位姿細胞和局部場景細胞的SLAM算法(VP-SLAM)
局部場景細胞在環境中學習獨特場景,模型化頭方向細胞和位置細胞的競爭性吸引子網絡結構所形成的位姿感知細胞表征當前位置,局部場景細胞和位姿細胞協同完成拓撲化經驗圖的繪制。在此過程中,抽象出融合頭方向與位置模型特性的信息需要通過某種關聯算法進行姿態表達,在相機圖像信息經過處理形成局部場景后,需選擇合適的視覺SLAM算法進行圖像處理。
現有基于鼠類導航策略的擴展海馬模型,其分別由局部場景細胞在環境中學習獨特場景,由頭方向細胞和位置細胞合并形成的位姿細胞表征當前位置,以及用節點與鏈路編碼局部場景細胞和位姿細胞構建拓撲化的經驗圖,如圖8所示。通過(x, y,θ)關聯一維頭方向細胞模型θ與二維位置細胞模型(x, y),實現位姿細胞的構建,其中,連續吸引子網絡(continuous attractive network,CAN)控制著位姿感知網絡內部的活動。其動態過程經歷3個階段:興奮度更新階段、對所有細胞的全局抑制階段以及對位姿感知細胞活動的歸一化階段。
對于局部場景信息的處理,通過Hessian矩陣行列式對圖像中的像素點進行分析,構造快速魯棒特征(speeded up robust feature,SURF)的特征點描述算子。其中,每個特征點采用64維向量的描述子進行匹配。
3.2 基于實時關鍵幀匹配的閉環檢測模型(GVP-SLAM)
視覺里程計漂移會形成累計誤差,通過閉環檢測可以修正復雜環境下定位導航里程計產生的累計誤差。現有IAB-MAP(incremental appearance-based mapping)和FAB-MAP(fast appearance-based mapping)閉環檢測算法,雖能勝任復雜環境下的閉環檢測問題,但由于它們通過逐個比較當前幀數據與各歷史幀數據的相似性,無法滿足實時性要求。本文基于的導航細胞模型在借鑒網格細胞場景重定位的基礎上設計相關算法提高實時性能,構建的實時關鍵幀匹配的閉環檢測模型能夠明顯提高系統的實時性能。
在閉環檢測過程中,要對采集到的足夠多的陌生場景進行信息匹配。一方面,必須通過某種手段對采集到的連續圖像和情境重現加以區分以避免誤判;另一方面,由于復雜環境的影響,采集的某一場景圖像信息可能會發生錯誤辨識。對于閉環檢測方法本身,需通過一種策略收集頻次較高和最臨近時刻出現的信息作為被匹配對象,在節約時間成本的條件下盡可能地準確匹配當前圖像信息。與一般的機器視覺算法不同,上述工作均需基于鼠類導航細胞。
借鑒網格細胞場景重定位并在此基礎上設計相關算法提高實時性能,構成一種基于實時關鍵幀匹配的閉環檢測模型,通過局部場景細胞進行實時關鍵幀匹配,實現閉環檢測,通過位姿細胞和局部場景細胞沿途構圖。如圖8所示,實時關鍵幀匹配的閉環檢測模型通過局部場景細胞進行新場景匹配的判斷,并通過局部場景細胞與位姿細胞關聯影響沿途構圖。

圖 8 基于鼠類導航細胞的實時關鍵幀匹配的閉環檢測模型Fig. 8 Closed loop detection model with real-time keyframe matching based on rats
本研究提出的實時關鍵幀匹配的閉環檢測模型具體流程包括定位點的建立、權重更新、貝葉斯估計更新、閉環假設選擇、恢復和轉換6部分,并引入了3種記憶模式,即工作記憶(working memory,WM)、長期記憶(long-term memory,LTM)和短時記憶(short-term memory,STM),具體策略如下。首先采集陌生場景信息,為避免實際環境的干擾,場景采集時需預先對同一場景多次采集并過濾其中的錯誤信息,確保場景采集的準確性。再通過設定閾值避免將當前采集到的連續圖像誤判為閉環。將當前位置時刻至過去某時刻內的信息儲存在短時記憶中,并選取所有過去時刻出現頻次最高的信息儲存在工作記憶中。最后通過當前位置與短時記憶存儲位置比較進行新位置的判別和權重更新,將當前位置與工作記憶存儲位置比較進行閉環檢測,同時,實時更新各記憶本身。此閉環檢測模型的流程圖如圖9所示,各記憶關系圖如圖10所示。
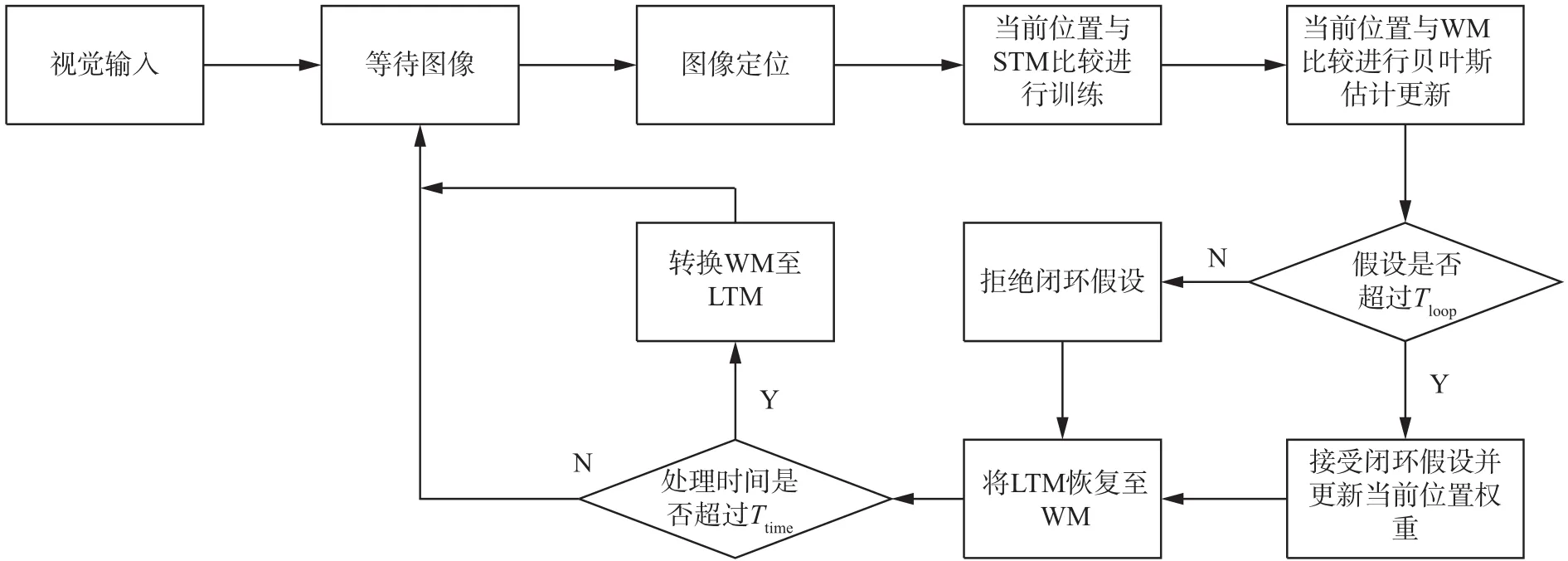
圖 9 實時關鍵幀匹配的閉環檢測模型流程圖Fig. 9 Flow chart of the closed loop detection of real-time keyframe matching

圖 10 實時關鍵幀匹配的閉環檢測中各記憶模式關系圖Fig. 10 Diagram of memory pattern in the closed loop detection of real-time keyframe matching
3.3 融合速度細胞和邊界細胞的鼠類導航模型(BVGSP-SLAM)
現有的位姿細胞無法適應外界多變的復雜環境,如移動障礙物的出現會導致視覺里程計速度的錯誤判別。根據發現的內嗅皮層中存在的速度細胞和邊界細胞,針對室內復雜環境的特點,利用速度細胞和邊界細胞的導航功能對移動機器人角度和速度等信息進行采集分析,輸出到終端設備并與鼠類導航細胞的沿途構圖進行比對。在3.2節研究的GVP-SLAM算法基礎上,引入速度細胞和邊界細胞實現移動機器人在突發障礙物等復雜環境下的精確導航,構成復合鼠類導航模型(BVGSP-SLAM)。
在GVP-SLAM算法基礎上引入內嗅皮層中的邊界細胞和速度細胞進行輔助導航。為探究其效果,將速度細胞和邊界細胞對鼠類導航模型的影響進行分別研究。利用手術在老鼠腦部植入電極,通過上位機可觀測速度細胞和邊界細胞的活性并建立數學模型。
1) 速度細胞活性及數學模型建立
在分析速度細胞活性的實驗中,將老鼠置于100 cm×100 cm×50 cm的盒子中,通過在隨機位置播撒食物屑促使老鼠進行任意運動,如圖11所示。為避免局部場景細胞對實驗的影響,該實驗在黑暗環境中進行;為避免老鼠自身行為對速度細胞產生的影響,本實驗忽略所有運動速度小于2 cm/s時老鼠速度細胞活性的變化。首先歸一化速度細胞活性;通過線性變換計算出速度細胞的發放率并表示其活性;然后對細胞進行無偏分析,通過無偏估計在實驗中調整速度細胞參數,利用尖峰電壓大小判斷速度細胞的活性強弱,通過一個由發放場和線性濾波器兩部分組成的簡單線性解碼器使速度細胞的活躍度具體化;再將該活性狀態信息傳遞給由頭方向細胞和位置細胞融合而成的位姿細胞,進而影響沿途構圖。

圖 11 黑暗環境下的速度細胞實驗及速度細胞分析過程Fig. 11 Speed cells experiment in dark environment and the analysis procedure of speed cells
2) 邊界細胞活性及數學模型建立
邊界細胞對于障礙物的判別,如圖12所示,無論老鼠的頭部朝向什么方向,邊界細胞的發放率都會隨老鼠離障礙物距離的減少而增加。每個邊界細胞的感受野通過兩個高斯函數的乘積構成,一個函數表示特定的距離,另一個函數表示非自我中心的方向。利用邊界細胞的發放率、邊界細胞的感受野及其與障礙物的距離信息構成邊界細胞發放率變化的表達式,這種細胞的發放率變化狀態即表現為細胞的活性狀態,再將該活性狀態信息通過神經元的感知機模型進行分析,并把所有速度細胞活性信息傳遞給由頭方向細胞和位置細胞融合而成的位姿細胞,進而影響沿途構圖。

圖 12 老鼠邊界細胞的感受野以及老鼠距離障礙物不同距離時發放率強度Fig. 12 Receptive field of border cells and firing rate at various distances of rats
3) 邊界細胞與速度細胞模型的關聯函數構造構造由邊界細胞和速度細胞發放率、感受野以及距離信息的關聯函數,采用統計學的方法剔除異常細胞,通過構建權值、中心和幅度3個參數可調的自適應模糊邏輯系統證明該關聯函數的穩定性,進而提高BVGSP-SLAM模型的魯棒性。
3.4 所需突破的關鍵性問題
復雜室內環境下SLAM存在如下問題:室內光線變化、突發障礙物等對導航系統產生影響,對于移動機器人本身,長時間導航下移動機器人也會存在里程計漂移等現象。本文針對這些問題建立了適合復雜室內環境的基于鼠類導航細胞的SLAM模型,所需突破的關鍵問題主要包括如下兩點。1) 實時關鍵幀匹配的閉環檢測建模現有的閉環檢測模型存在復雜度高、實時性差等問題,本文提出了一種實時關鍵幀匹配的閉環檢測模型,該模型通過“長期記憶”、“短時記憶”等記憶單元的協同作用完成關鍵幀匹配,同時可以通過“長期記憶”和“短時記憶”單元的切換和恢復,降低系統運算的復雜度,這也是后續融入速度細胞模型和邊界細胞模型完成實時導航的基礎。因此,該問題是研究內容待解決的關鍵問題之一。2) 邊界細胞和速度細胞模型關聯函數的構造邊界細胞和速度細胞模型分別由其發放率、感受野以及距離信息等動態參數決定,兩種模型通過關聯函數各自影響沿途構圖。采用統計學的方法剔除異常細胞,通過構建權值、中心和幅度3個參數可調的自適應模糊邏輯系統證明該關聯函數的穩定性,研究基于邊界細胞和速度細胞模型關聯的融合方法,將多種調度參數信息融入到控制方法的設計中,這也是沿途構圖準確度提高面臨的主要問題。因此,該問題是研究內容待解決的另一關鍵問題。
4 結束語
基于鼠類腦細胞導航機理的模型算法魯棒性強,能夠解決全局SLAM問題。綜觀這種基于鼠類腦細胞導航機理的模型算法的研究現狀,其相關的研究仍處于初級階段,有很多問題值得進一步的研究,本文提出運用仿生學研究、醫工結合、數值計算方法、解析計算方法,結合信息學、控制學、仿生學等基礎理論并建立適用于復雜環境下快速、準確、全面的融入鼠類腦細胞導航機制的移動機器人衍生同步定位地圖構建方法體系。本文重點探討了以鼠類腦細胞中邊界細胞、局部場景細胞、網格細胞、速度細胞、位姿細胞等具有定位導航功能的細胞模型應用于SLAM研究中,構建一種基于多細胞導航機制的BVGSP-SLAM模型:融入局部場景細胞、位姿細胞和網格細胞以盡可能減少光線變化對視覺里程計的影響,引入邊界細胞和速度細胞以對突發障礙物和自身速度進行進一步判別,再將混合細胞算法引入仿生傳感系統并在移動機器人平臺上進行硬件驗證,為移動機器人SLAM研究領域提供了生物細胞學重要解決思路的理論參考。在此基礎上如何實現在實驗場景更加惡劣的情況下動態調節現有細胞導航模型的參數仍值得進一步研究,如何通過現有的鼠類模型進行算法改進或借鑒其他生物模型特性實現空中與水下的導航研究也將是未來SLAM發展的一個重要研究方向。
[1]TOLMAN E C. Cognitive maps in rats and men[J]. Psychological review, 1948, 55(4): 189–208.
[2]O’KEEFE J, DOSTROVSKY J. The hippocampus as a spatial map. Preliminary evidence from unit activity in the freely-moving rat[J]. Brain research, 1971, 34(1): 171–175.
[3]RANCK J L, LETELLIER L, SHECHTER E, et al. X-ray analysis of the kinetics of Escherichia coli lipid and membrane structural transitions[J]. Biochemistry, 1984, 23(21):4955–4961.
[4]于乃功, 王琳, 李倜, 等. 網格細胞到位置細胞的競爭型神經網絡模型[J]. 控制與決策, 2015, 30(8): 1372–1378.YU Naigong, WANG Lin, LI Ti, et al. Competitive neural network model from grid cells to place cells[J]. Control and decision, 2015, 30(8): 1372–1378.
[5]于平, 徐暉, 尹文娟, 等. 網格細胞在空間記憶中的作用[J].心理科學進展, 2009, 17(6): 1228–1233.YU Ping, XU Hui, YIN Wenjuan, et al. The roles of grid cells in spatial memory[J]. Advances in psychological science, 2009, 17(6): 1228–1233.
[6]KROPFF E, CARMICHAEL J E, MOSER M B, et al.Speed cells in the medial entorhinal cortex[J]. Nature, 2015,523(7561): 419–424.
[7]DEMPSTER A P, LAIRD N M, RUBIN D B. Maximum likelihood from incomplete data via the EM algorithm[J].Journal of the royal statistical society, 1977, 39(1): 1–38.
[8]SMITH R C, CHEESEMAN P. On the representation and estimation of spatial uncertainly[J]. International journal of robotics research, 1987, 5(4): 56–68.
[9]SMITH R, SELF M, CHEESEMAN P. Estimating uncertain spatial relationships in robotics[J]. Machine intelligence and pattern recognition, 1988, 5(5): 435–461.
[10]JULIER S J, UHLMANN J K. Unscented filtering and nonlinear estimation[J]. Proceedings of the IEEE, 2004,92(3): 401–422.
[11]JULIER S, UHLMANN J, DURRANT-WHYTE H F. A new method for the nonlinear transformation of means and covariances in filters and estimators[J]. IEEE transactions on automatic control, 2000, 45(3): 477–482.
[12]ARASARATNAM I, HAYKIN S. Cubature Kalman filters[J]. IEEE transactions on automatic control, 2009,54(6): 1254–1269.
[13]NIEDERREITER H. Random number generation and quasi-monte carlo methods[J]. Journal of the american statistical association, 1992, 88(89): 147–153.
[14]THRUN S, FOX D, BURGARD W, et al. Robust Monte Carlo localization for mobile robots[J]. Artificial intelligence, 2001, 128(1): 99–141.
[15]MONTEMERLO M, THRUN S, WHITTAKER W. Conditional particle filters for simultaneous mobile robot localization and people-tracking[C]//Proceedings of 2002 IEEE International Conference on Robotics and Automation.Washington, DC, USA, 2002: 695–701.
[16]WEHNER R, GALLIZZI K, FREI C, et al. Calibration processes in desert ant navigation: vector courses and systematic search[J]. Journal of comparative physiology A, 2002,188(9): 683–693.
[17]劉新玉, 海鑫, 尚志剛, 等. 利用粒子濾波重建位置細胞編碼的運動軌跡[J]. 生物化學與生物物理進展, 2016,43(8): 817–826.LIU Xinyu, HAI Xin, SHANG Zhigang, et al. Decoding movement trajectory of hippocampal place cells by particle filter[J]. Progress in biochemistry and biophysics, 2016,43(8): 817–826.
[18]胡波, 隋建峰. 海馬位置細胞空間信息處理機制的研究進展[J]. 中華神經醫學雜志, 2005, 4(4): 416–418.HU Bo, SUI Jianfeng. Advance of mechanisms of spatial processing for hippocampal place cells[J]. Chinese journal of neuromedicine, 2005, 4(4): 416–418.
[19]王可, 張婷, 王曉民. 大腦中的“定位系統”——2014年諾貝爾生理學或醫學獎簡介[J]. 首都醫科大學學報, 2014,35(5): 671–675.WANG Ke, ZHANG Ting, WANG Xiaomin. “Inner GPS”in the brain——introduction of Nobel Prize in Physiology or Medicine 2014[J]. Journal of capital medical university,2014, 35(5): 671–675.
[20]田莉雯. 基于頂部攝像頭和鼠載攝像頭的大鼠自動導航系統[D]. 杭州: 浙江大學, 2015.TIAN Liwen. An automatic navigation system based on a rat-mounted camera and a bird’s eye camera[D]. Hangzhou: Zhejiang University, 2015.
[21]查峰, 肖世德, 馮劉中, 等. 移動機器鼠沿墻導航策略與算法研究[J]. 計算機工程, 2012, 38(6): 172–174.ZHA Feng, XIAO Shide, FENG Liuzhong, et al. Research on wall-following navigation strategy and algorithm for mobile mechanical mouse[J]. Computer engineering, 2012,38(6): 172–174.
[22]SKAGGS W E, KNIERIM J J, KUDRIMOTI H S, et al. A model of the neural basis of the rat's sense of direction[J].Advances in neural information processing systems, 1995,7: 173–180.
[23]REDISH A D, ELGA A N, TOURETZKY D S. A coupled attractor model of the rodent head direction system[J]. Network: computation in neural systems, 1997, 7(4): 671–685.
[24]SAMSONOVICH A, MCNAUGHTON B L. Path integration and cognitive mapping in a continuous attractor neural network model[J]. Journal of neuroscience: the official journal of the society for neuroscience, 1997, 17(15): 5900–5920.
[25]STRINGER S M, ROLLS E T, TRAPPENBERG T P, et al. Self-organizing continuous attractor networks and path integration: two-dimensional models of place cells[J]. Network: computation in neural systems, 2002, 13(4): 429–446.
[26]MILFORD M J, WYETH G F, PRASSER D. RatSLAM: a hippocampal model for simultaneous localization and mapping[C]//Proceedings of 2004 IEEE International Conference on Robotics and Automation. New Orleans, LA,USA, 2004: 403–408.
[27]MILFORD M, WYETH G. Persistent navigation and mapping using a biologically inspired SLAM system[J]. International journal of robotics research, 2009, 29(9): 1131–1153.
[28]PRASSER D P, WYETH G, MILFORD M. Experiments in outdoor operation of RatSLAM[C]//Proceedings of 2004 Australasian Conference on Robotics and Automation.Canberra, Australia, 2004: 1–6.
[29]PRASSER D, MILFORD M, WYETH G. Outdoor simultaneous localisation and mapping using RatSLAM[C]//Proceedings of the Results of the 5th International Conference.Berlin, Heidelberg, Germany, 2006: 143–154.
[30]MILFORD M J, PRASSER D, WYETH G. Effect of representation size and visual ambiguity on RatSLAM system performance[C]//Proceedings of 2006 Australasian Conference on Robotics and Automation. Auckland, New Zealand, 2006: 1–8.
[31]MILFORD M, SCHULZ R, PRASSER D, et al. Learning spatial concepts from RatSLAM representations[J]. Robotics and autonomous systems, 2007, 55(5): 403–410.
[32]MILFORD M, WYETH G, PRASSER D. RatSLAM on the edge: revealing a coherent representation from an overloaded rat brain[C]//Proceedings of 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems.Beijing, China, 2006: 4060–4065.
[33]DHANDE O S, HUBERMAN A D. Retinal ganglion cell maps in the brain: implications for visual processing[J].Current Opinion in Neurobiology, 2014, 24(1): 133.
[34]許曈, 凌有鑄, 陳孟元. 一種融合DGSOM神經網絡的仿生算法研究[J]. 智能系統學報, 2017, 12(3): 405–412.XU Tong, LING Youzhu, CHEN Mengyuan. A bio-inspired algorithm integrated with DGSOM neural network[J]. CAAI transactions on intelligent systems,2017, 12(3): 405–412.
[35]MILFORD M J, SCHILL F, CORKE P, et al. Aerial SLAM with a single camera using visual expectation[C]//Proceedings of 2011 IEEE International Conference on Robotics and Automation. Shanghai, China, 2011:2506–2512.
[36]張瀟, 胡小平, 張禮廉,等. 一種改進的RatSLAM仿生導航算法[J]. 導航與控制, 2015, 14(5): 73–79.ZHANG Xiao, HU Xiaoping, ZHANG Lilian, et al. An improved bionic navigation algorithm based on RatSLAM[J].Navigation and control, 2015, 14(5): 73–79.
[37]MADDERN W, GLOVER A, GORDON W, et al. Augmenting RatSLAM using FAB-MAP-based visual data association[C]// Curran Associates, 2013:2–4.
[38]許曈, 凌有鑄, 陳孟元, 等. 基于姿態測量模塊和閉環檢測算法的仿生SLAM研究[J]. 傳感技術學報, 2017,30(6): 916–921.XU Tong, LING Youzhu, CHEN Mengyuan, et al. Bio-inspired SLAM based on gesture measuring and closed-loop detection[J]. Chinese journal of sensors and actuators,2017, 30(6): 916–921.
[39]BERKVENS R, WEYN M, PEREMANS H. Asynchronous, electromagnetic sensor fusion in RatSLAM[C]//Proceedings of 2015 IEEE SENSORS. Busan, South Korea,2015: 1–4.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
制造技術與機床(2017年3期)2017-06-23 08:11:21
光學精密工程(2016年6期)2016-11-07 09:07:19
智能系統學報(2015年4期)2015-12-27 09:38:35
核科學與工程(2015年4期)2015-09-26 11:59:03
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31