無人水面艇反潛戰載荷分析
2018-03-12 07:45:19蘇金濤
艦船科學技術 2018年2期
蘇金濤
(江蘇自動化研究所,江蘇 連云港 222061)
0 引 言
傳統有人反潛作戰平臺(水面艦艇、反潛直升機、固定翼反潛機),以及水下對潛警戒網絡和天基對潛警戒網絡,共同構筑了當前最有效的反潛作戰體系。但潛艇戰和反潛戰歷來是不對稱作戰,現有的反潛作戰體系的高成本,是該體系的一大短板。無人水面艇可以以十幾分之一、甚至幾十分之一的成本,彌補對潛艇發現、跟蹤和打擊能力的不足,實現對更加廣域海區的水下控制,提高執行反潛任務的效率和效費比,使之前不可能完成的任務變為可能,充分抵消潛艇戰帶來的不對稱性,從而帶來傳統反潛作戰模式的改變。反潛戰載荷是無人水面艇執行反潛作戰任務的核心部分,由于無人水面艇反潛作戰、無人水面艇平臺以及作戰環境的特殊性,使得無人水面艇反潛戰載荷與傳統有人平臺的反潛作戰系統有很大的不同,對無人水面艇反潛戰載荷進行詳細分析,是指導反潛型無人水面艇以及反潛戰載荷設計、實現以及使用的有效途徑。
1 無人水面艇反潛任務需求
一般而言,常規潛艇以及攻擊型核潛艇所構成的威脅主要在于:1)進行抵近情報搜集和特種作戰;2)對港口、島礁等重要目標進行攻擊;3)對主要航道進行封鎖;4)對遠海艦艇編隊進行伏擊作戰。針對以上潛艇威脅,無人水面艇加入現有的反潛作戰體系,可與傳統有人反潛作戰平臺協同執行對潛警戒、搜索、確認、跟蹤、攻擊任務。根據無人水面艇的特點,其在反潛作戰體系中可承擔2項任務:1)近岸反潛巡防;2)艦艇(編隊)對潛搜索和攻擊。
近岸反潛巡防時,利用無人水面艇(群)長航時、大范圍、低成本的特點,可在離岸一定范圍內,特別是重要航道附近保持全天候、全遮蓋對潛警戒搜索,無人水面艇近岸反潛巡防作戰概念如圖1所示。
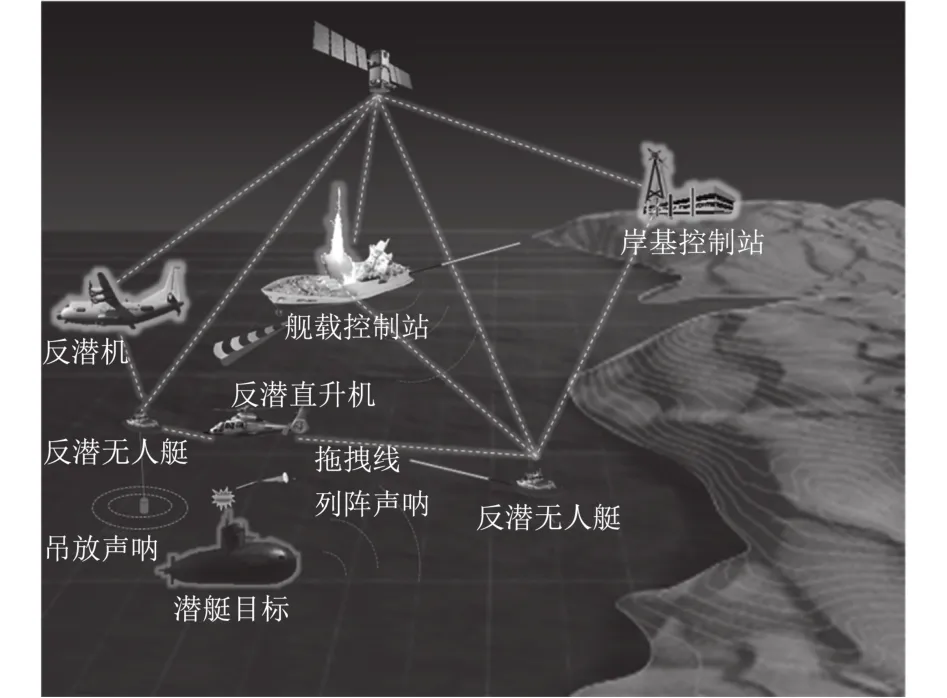
圖 1 無人水面艇近岸反潛巡防作戰概念圖Fig. 1 The concept of offshore anti-submarine scout
艦艇(編隊)反潛搜索和攻擊時,無人水面艇可作為重要反潛方向上前出兵力,彌補艦艇水下探測距離不足的短板,彌補艦載反潛直升機留空時間短的短板,拓展艦艇水下探測范圍和攻擊范圍,對確認目標及時進行誘騙和首輪打擊,無人水面艇艦艇(編隊)對潛搜索和攻擊作戰概念如圖2所示。

圖 2 無人水面艇艦艇(編隊)對潛搜索和攻擊作戰概念圖Fig. 2 The concept of along with ship anti-submarine
2 無人水面艇反潛戰載荷適裝性
將反潛戰裝備集成到無人水面艇上并形成戰斗力,要從3個方面進行考慮:
1)無人水面艇反潛任務需求。用于大面積海域,以及重點海域的對潛警戒、搜索,要首先考慮探潛設備的探測效率;在外部信息支援下,用于潛艇目標的確定和跟蹤,要首先考慮探測設備的探測精度;對潛艇目標進行打擊,需要考慮裝備攻潛武器。目前可用于無人水面艇的探潛設備主要有拖曳線列陣聲吶、吊放聲吶和磁探儀3種。拖曳線列陣聲吶探測距離較遠,可在無人水面艇連續航行過程中使用[1];吊放聲吶探測距離較近,需要進行跳躍式探測,在一個探測點和下一個探測點之間,需要對吊放聲吶進行收放[2];磁探儀對潛作用距離短,有效搜索寬度小,一般作為鑒別器材,可以較準確地測得潛艇的位置以及運動要素。目前可用于無人水面艇的攻潛設備主要有輕型魚雷和深水炸彈。輕型魚雷是水面艦艇最有效的反潛武器,國外聲自導輕型魚雷對潛命中概率可達50%以上;火箭助飛式深水炸彈一次齊射對潛摧毀概率僅為10%左右[3],目前一般不用于對潛攻擊,更不適合載重量小的無人水面艇平臺用作攻潛武器。
2)無人水面艇任務載荷搭載能力。按美國無人水面艇等級劃分,艦隊級無人水面艇任務載荷重量可達到2 300 kg[4],如美國的Spatan Scouter 11米版[5]和Darco[6],及以色列的Seagull[7];港口級無人水面艇任務載荷重量可達到1000 kg[4],如美國的Spatan Scouter 7米版[5]和以色列的Protector[8]。再大級別的無人水面艇隨母艦出行有困難,只能依托基地部署;再小級別的無人水面艇(X級[4]),載荷搭載能力有限,只能執行一般偵查、監視、警戒任務。按照目前反潛裝備技術發展水平,全套拖曳線列陣聲吶系統的重量從幾噸到幾十噸,但輕型拖曳線列陣聲吶重量可滿足小型平臺使用要求;全套的吊放聲吶系統和全套的磁探儀系統,重量均在幾百千克以內。如果無人水面艇搭載魚雷武器具備對潛攻擊能力,單枚魚雷武器系統(包括發射裝置、魚雷及配套設備)總重量之和為1 000 kg以上。對于艦隊級無人水面艇,有足夠的空間同時安裝拖曳線列陣聲吶、吊放聲吶、磁探儀,以及魚雷武器系統;對于港口級無人水面艇,具備單獨安裝拖曳線列陣聲吶、吊放聲吶和磁探儀的空間,魚雷武器則不作考慮。
3)作戰使用環境影響。對于艦隊級無人水面艇,一般可在4級海況下工作,6級海況下生存;對于港口級無人水面艇,一般可在3級海況下工作,5級海況下生存。無人水面艇本身對海深無特殊要求,一般艦隊級無人水面艇滿載吃水深度小于1 m,港口級無人水面艇滿載吃水深度小于0.5 m,沿海岸區域亦可保證其工作安全。但聲吶的使用對于環境有特殊要求,當使用拖曳線列陣聲吶時,不僅要考慮海深和海況,還要考慮海中障礙(漂浮物、暗礁、人工建筑)的影響,近海使用有所限制;相比較而言,吊放聲吶和磁探儀使用時對于環境要求較為寬松,滿足海況、使用最小海深和平臺噪聲條件即可。當搭載反潛魚雷武器時,魚雷武器發射時對無人水面艇有姿態穩定的要求。
港口級無人水面艇由于使用環境限制和載荷搭載能力限制,只能在近海執行巡邏警戒任務,雖然便于岸基或隨母艦部署,但在反潛方面實用性存在很大的不足;大型無人水面艇在環境適應能力、載荷搭載能力、平臺運行能力等方面皆可滿足近海、遠海反潛作戰需求,可作為岸基部署的首選,但隨母艦部署時要求較高,深海反潛作戰時對其保障存在一定的困難。從使用需求和具備的使用條件來講,艦隊級無人水面艇是目前反潛型無人水面艇的最佳選擇。艦隊級無人水面艇可適應6級以上海況,續航里程一般能達到400 nmile,巡航時間96 h以上,即可滿足岸基部署,又較方便部署在各型水面艦艇上,隨編隊進行深海反潛作戰[5–7];載荷搭載能力可達到2 300 kg,通過平臺優化設計和載荷優化設計,可攜帶有效的探潛裝備和攻潛裝備,滿足反潛作戰需要。
3 無人水面艇反潛戰載荷集成方式
遵循無人水面艇“平臺通用化、功能多樣化、載荷模塊化”的設計理念,無人水面艇反潛戰載荷應采用“搭積木”方式構建。無人水面艇反潛戰載荷是一塊大積木,同時反潛戰載荷又是由輕型拖曳線列陣聲吶、吊放聲吶和輕型魚雷發射裝置等小積木搭建而成,積木與積木之間在物理上是松耦合的,在信息上和功能上是緊耦合、動態化的。根據無人水面艇反潛任務的不同,能夠敏捷地進行反潛戰載荷構建,并便捷地將反潛戰載荷集成到無人水面艇平臺上。
無人水面艇反潛戰載荷的全集如圖3所示。反潛戰載荷的全集包含無人水面艇艇上部分和岸基/母艦部分2部分,無人水面艇艇上設備全集包括:輕型拖曳線列陣聲吶系統、吊放聲吶系統、磁異探測儀系統、輕型魚雷發射裝置及魚雷和反潛任務管理單元,岸基/母艦部分設備是反潛任務遙控單元。
無人水面艇“模塊化”反潛戰載荷“搭積木”構建方法如圖4所示。
由圖4可知,無人水面艇反潛戰載荷以及反潛戰載荷內的各個組成部分采用“即插即用”的靈活部署模式,要實現此種方式,可通過物理層和信息層2個層面實現。
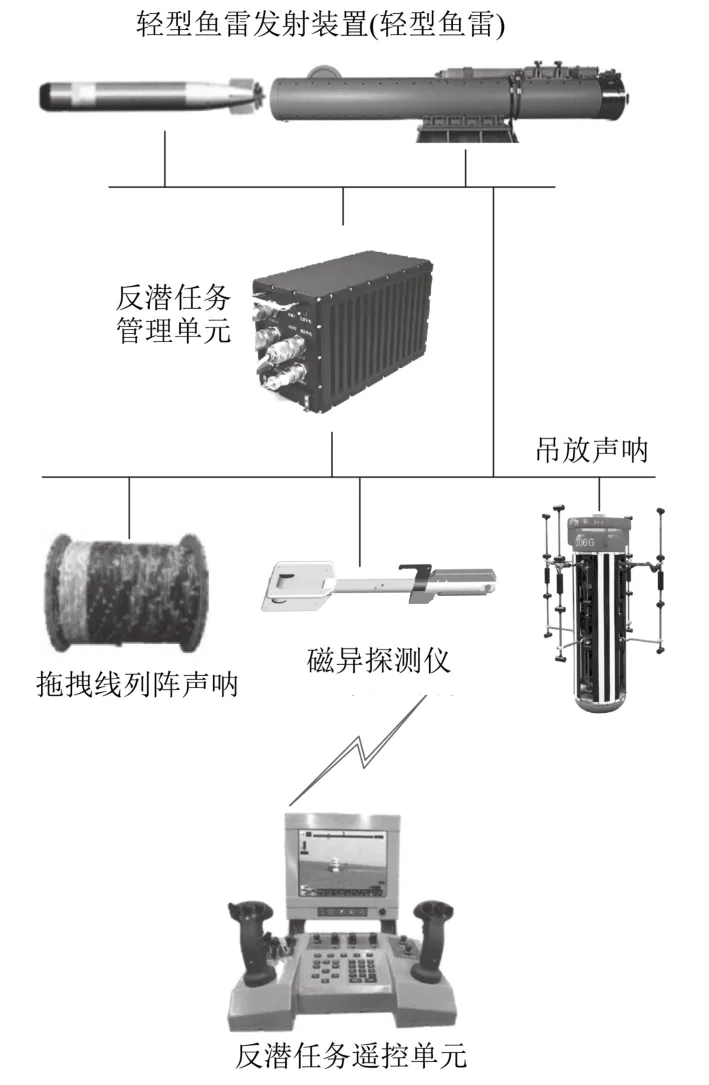
圖 3 無人水面艇反潛戰載荷全集組成示意圖Fig. 3 The total composition of anti-submarine module
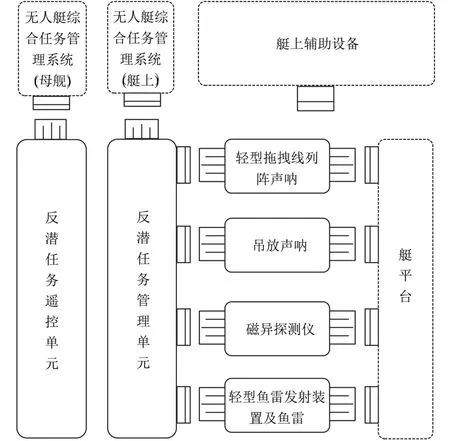
圖 4 無人水面艇反潛戰載荷“搭積木”構建示意圖Fig. 4 The building method of anti-submarine module
物理層上,在保證相應性能指標前提下,反潛戰載荷內部各組成部分小型化、輕量化、模塊化。小型化和輕量化保證了反潛戰載荷的適裝性,但相應增加了技術實現的難度,需要找到一個均衡點;模塊化保證了反潛戰載荷“即插即用”的特點,實現模塊的方法,需要統一設備信息傳輸接口與工作保障接口,減少設備信息傳輸接口和工作保障接口類型,多種設備公用信息處理平臺,功能模塊通用化,設備安裝接口盡量簡化對無人艇平臺的要求,進行快拆設計等。
信息層上,基于軟件模塊化設計思想,采用“軟總線”和“軟件重部署”的方法,建立反潛戰載荷軟件系統快速重構的機制,以及反潛戰載荷與無人水面艇其它組成部分之間快速鏈接的機制。反潛任務遙控單元和反潛任務管理單元配置反潛戰載荷管理軟件全集,能夠根據反潛戰載荷組成單元的變化,實時動態識別載荷構成,實時動態激活或休眠相應軟件模塊,實現反潛戰載荷內部各組成單元,以及反潛戰載荷與無人水面艇系統的“熱插拔”。
4 無人水面艇反潛戰載荷使用方式
根據水面艇反潛任務分析,可將無人水面艇執行的反潛任務劃分為3個子任務:近岸巡防、編隊警戒和應招搜攻潛。針對每個子任務的主要關注點不同,根據無人水面艇反潛載荷適裝性分析,為無人水面艇配置相應的反潛戰載荷,如表1所示。

表 1 反潛戰載荷部署情況Tab. 1 The deployment of anti-submarine module
在每種配置中,都包含反潛任務遙控單元和反潛任務管理單元。反潛任務遙控單元部署于岸基或母艦上,是整個無人水面艇系統任務控制系統的組成部分,主要用于無人水面艇執行反潛戰任務的人工干預,包括作戰態勢人工分析、反潛作戰人工決策、探測設備和反潛武器遙控操作等。反潛任務管理單元部署于無人水面艇上,是無人水面艇上反潛戰載荷的核心設備,對無人水面艇上反潛戰載荷其他設備進行綜合管理,完成探潛設備和反潛武器的控制流程,綜合處理探潛設備探測到的目標數據,形成相應的反潛作戰態勢,在反潛任務遙控單元監督下,完成自主/半自主反潛作戰決策等。
當無人水面艇主要用于執行對潛近岸巡防任務時,反潛戰載荷中還包含輕型拖曳線列陣聲吶、吊放聲吶和磁異探測儀。輕型拖曳線列陣聲吶主要用于開闊水域的大范圍機動搜潛,以提高無人水面艇搜潛的效率;吊放聲吶作用有2個方面,一是在不適宜使用輕型拖曳線列陣聲吶的海域(如航道、近海岸、島礁或人工建筑復雜海域)進行搜潛作業,二是在輕型拖曳線列陣聲吶發現潛艇目標后,由吊放聲吶進一步確認和探測精確目標運動數據,供反潛武器射擊諸元解算使用;磁異探測儀可用于輕型拖曳線列陣聲吶發現潛艇目標后,進一步確認和探測目標精確運動數據,供反潛武器射擊諸元解算使用,其更主要的用途是,可在重要航道和海底地形復雜區域,通過歷史探測數據的實時對比,發現座底及隱藏目標,以及對于潛艇布放水雷的探測。由于近岸時,岸上航空反潛平臺(主要是反潛直升機)可以迅速抵達潛艇出沒區域,無人水面艇用于對潛近岸巡防時,主要側重于對潛艇目標大范圍、長時間的搜索,一旦發現目標,即時通告,由岸上航空反潛平臺攜帶反潛武器(輕型反潛魚雷、深水炸彈)對目標進行驅離和攻擊。
當無人水面艇主要用于執行對潛編隊警戒任務時,反潛戰載荷中還包含輕型拖曳線列陣聲吶和磁異探測儀。無人水面艇可作為編隊重要反潛方向上前出兵力,利用輕型拖曳線列陣聲吶對該方向的海域進行大范圍、長時間的搜索,可以有效彌補水面艦艇艦載聲吶設備探測距離不足的短板,彌補艦載反潛直升機留空時間短的短板,拓展水面艦艇編隊對潛艇目標的探測范圍;磁異探測儀可用于輕型拖曳線列陣聲吶發現潛艇目標后,對目標的進一步確認和探測目標精確運動數據,為艦載反潛武器系統或艦載反潛直升機提供目標指示,由艦載助飛魚雷或機載反潛魚雷對潛艇目標進行攻擊,同時可兼顧對作戰海域內水雷的探測。
當無人水面艇主要用于執行對潛應招搜攻任務時,反潛戰載荷中還包含吊放聲吶、魚雷發射裝置和輕型魚雷。在有外部情報支持下,無人水面艇利用速度快、風險低、持續時間長的特點,到達潛艇目標可疑區域,進一步對潛搜索、確認后,發射輕型魚雷武器,擊毀或壓制敵潛艇,彌補艦載反潛直升機留空時間短、風險高的短板。
5 結 語
反潛型無人水面艇的設計與使用是一項系統工程,反潛戰載荷是該工程中的重要組成部分。本文著眼于實用化和現有裝備技術水平,對無人水面艇反潛戰載荷進行了系統分析,可為一段時期內反潛型無人水面艇以及無人水面艇反潛戰載荷的實現提供借鑒。但從無人水面艇的發展歷程和發展前景來看,真正實戰化的反潛型無人水面艇的實現仍面臨諸多問題,其中自主化作戰是最困難的一點,賦予反潛戰載荷自主運行的能力是未來很長時間內的技術挑戰[9],也是下一步的研究內容。
[1]王自發, 朱克強, 張天宇, 等. 拖曳線列陣聲吶的研究現狀與發展趨勢[J]. 艦船科學技術, 2013(7): 1–7.
[2]王凈, 占凱. 反潛直升機吊放聲吶搜索效率模型研究[J]. 艦船電子工程, 2014(3): 159–161.
[3]尤曉航. 艦載深彈武器系統發展思路探討[J]. 指揮控制與仿真, 2006(3): 1–5.
[4]The Navy Unmanned Surface Vehicle (USV) Master Plan[R].Navy US, 2007.
[5]Robert Mons. Design and Testing of the Spartan USV Mine Warfare Module[R]. Northrop Grumman Corporation, 2005.
[6]何萍, 陽明, 馬悅. 全球海戰機器人[M]. 北京: 解放軍出版社,2012.
[7]SeagullTM Multi-Mission USV System, http://elbitsystems.com/media/Seagull-2016.pdf, 2017.03.
[8]ProtectorTM Unmanned Integrated Naval Combat system,http://www.rafael.co.il/5680-2257-en/Marketi-ng.aspx, 2017.03.
[9]王家鑫. 反潛無人水面艇及其聲吶設備[J]. 聲學與電子工程,2015(2), 46–49.