基于混合總線的裝甲車輛實車綜合測試系統設計
2018-03-10 01:32:19彭文家金昊龍潘志強
吉林大學學報(工學版) 2018年1期
楊 誠,宋 萍,彭文家,金昊龍,潘志強
(1.北京理工大學 仿生機器人與系統教育部重點實驗室,北京 100081;2.中國北方車輛研究所,北京 100072;3.中國儀器進出口(集團)公司,北京 100041 )
0 引 言
當前,用于裝甲車輛試驗的測試系統已經有了較快的發展,西北工業大學設計了針對導彈裝甲車輛行駛平順性的測試系統[1];華南理工大學設計了針對車輛輪荷的測試系統[2];湖南大學研究了針對混合動力客車的測試系統[3];裝甲兵工程學院設計了針對柴油機狀態評估、蓄電池特性、駕駛員操作穩定性等多種測試系統[4-6]。但是這些系統對于整車的動態測試仍然存在局限性:一方面,在系統設計上,這些測試系統主要是針對車輛的單個系統或部件進行設計,且大多應用于整車、分系統或部件樣機的臺架試驗中,因此試驗測試結果往往無法真實、全面反映出裝甲車輛整車野外復雜惡劣工況下的實際情況,難以為車輛設計人員提供全面、可靠的設計依據;另一方面,在數據采集方式上,這些系統大部分采用有線采集方式,但是有線采集方式在車輛底盤扭桿、車輪等環境惡劣、空間狹小的部件上存在安裝、接線、維護等方面的困難,因此限制了測試系統的能力。
隨著無線技術的發展,基于無線傳感器網絡的分布式測試系統有效彌補了有線測試的不足,為車輛測試提供了一種新的手段[7-9]。通過使用有線和無線相混合的測試方法[10,11]能夠最大程度地結合兩者的優勢,既能滿足裝甲車輛整車測試對于大數據量實時傳輸的要求,又能滿足對某些特殊部件測試的靈活性要求。基于此,本文提出了一種基于混合總線的裝甲車輛網絡化實車綜合測試系統。整個系統以NI CompactRIO為基礎平臺,通過有線、無線、CAN總線3種測試方法對整車進行全參數數據采集,并針對測試參數多、測試數據采樣率不一致、數據量大等問題,提出了基于自適應數據緩存控制和基于最大采樣率的偽均勻采樣的數據流控制策略,從而使得系統能夠根據測試任務的配置要求,自動調整數據流處理方式,提高了系統資源利用率和處理速度,最終實現了測試數據的實時采集、傳輸、存儲和顯示。
1 測試需求分析與系統硬件設計
1.1 測試需求分析
本文設計的網絡化綜合測試系統是以裝甲車輛整車為測試對象,不僅待測參數超過220路,涉及車輛動力、傳動等多個分系統,而且由于待測信號類型的不同,采樣頻率也不一致,例如,對于加速度、振動、轉速等瞬變信號而言,采樣頻率一般在2.5 kHz,相比之下對于溫度、氣壓、流速等緩變信號的采樣頻率則通常不超過100 Hz。基于上述分析,結合現有車輛的內部構造,本文提出的綜合測試系統結合了有線、無線、CAN總線3種測試方法。其中,有線測試用于高頻信號的采集,無線測試用來解決線纜布設困難處的部件測試問題,CAN總線則是以現有車載CAN總線為基礎,不僅可以實現低頻信號的采集,還能有效降低研發成本,提高與車輛現有系統的結合,在綜合考慮了測試需求和系統實際布設情況后,整車測試參數信息如表1所示。
1.2 系統硬件設計
1.2.1 測試系統總體硬件架構
基于裝甲車輛的測試需求分析,設計了基于混合總線的綜合測試系統,系統架構如圖1所示。整個系統為3層架構,位于上層的是車載上位機,其作為整個測試系統的測控終端負責試驗測試任務管理、測試流程監控、待測信號的實時觀測以及測試數據管理;位于中間層的是測試系統主機,其既需要與頂層的車載上位機之間進行通信,又需要控制底層信號調理節點的工作,完成數據的交互、解析、傳輸與存儲,是整個測試系統的核心;位于系統架構底層是分布于車輛各處,面向具體待測對象的采集調理節點,根據所采用的測試方法共分為有線信號調理節點、CAN采集節點、無線測試節點3類。

圖1 裝甲車輛實車綜合測試系統架構Fig.1 Architecture of armored vehicle test system
1.2.2 測試系統主機設計
從裝甲車輛綜合測試系統的架構可以看出:測試系統主機處于整個系統的核心位置,系統主機的可靠與否直接決定了底層信號調理節點所采集的數據是否能夠完整且實時地進行存儲,同時也決定了上層測控終端是否能夠實時、有效地對測試系統的運行進行控制。此外,裝甲車輛內部結構復雜、空間狹小,除了行車過程中伴隨著振動和沖擊外,根據野外試驗測試環境的不同還存在熱區高溫或寒區零下溫度的工作環境。基于上述特點,本文設計了基于CompactRIO嵌入式采集平臺的測試系統主機,主機結構圖如圖2所示。

圖2 測試系統主機結構圖Fig.2 Structure of test system host
CompactRIO嵌入式采集平臺是NI公司生產的一款可重新配置的嵌入式開發平臺,相比于傳統的PXI和CPCI總線的測試平臺,具有體積小、寬溫、抗震性高的特點,能夠滿足裝甲車輛在各種惡劣條件下的測試要求。本系統在選型上配置了采用堅固型設計的cRIO 9025控制器和具備8槽可配置的cRIO 9118機箱。采集平臺配置了5個NI 9220和1個NI 9223共6個模擬量采集板卡,其與底層的有線信號調理節點相連,最大可實現84路有線信號的同步采集;1個NI 9853雙CAN口采集板卡,分別與CAN1和CAN2測試網絡的信號調理節點相連,分別接收CAN1和CAN2測試網絡中的信號采樣數據包。
如圖2所示,測試系統主機除CompactRIO嵌入式采集平臺外,還設計了無線網關模塊,其主要負責無線測試網絡與cRIO控制器之間的通信,包括組建無線測試網絡,下發控制指令給網絡內各個無線測試節點,以及上傳無線測試節點采集的數據;網絡交換機的主要功能是建立車載測控終端、cRIO控制器、無線網關之間的物理通信鏈路,實現命令的傳輸和數據的交換;而電源模塊的主要功能則是解決裝甲車輛車載電源質量不高的問題,通過對電源的穩壓、濾波處理,使其符合機箱內部各個模塊的供電要求,進而保護各個模塊。
1.2.3 無線測試節點的設計
利用無線測試節點在裝甲車輛上進行數據采集需要重點解決兩個問題:一是小型化,由于車輛內部空間狹小,所以節點體積必須能滿足待測部件所在環境的要求;二是數據傳輸速率需要滿足實車測試實時觀測以及離線數據深度分析的要求。
對于小型化問題,本文從硬件模塊選型、PCB布局、節點防護外殼結構等多個方面進行了綜合設計與集成,使得節點的體積控制在7.5 cm×5.5 cm×3 cm,能夠滿足底盤內多種待測部件的環境要求。節點實物如圖3所示。

圖3 無線測試節點實物圖Fig.3 Picture of wireless sensor network test node
節點硬件模塊主要包括A/D模塊、FPGA主控制器、SDRAM、EPCS配置芯片、SD卡和無線模塊。其中FPGA為核心模塊,通過內部采樣控制器控制A/D模塊將模擬信號轉換成數字信號,轉換后的數據經FIFO緩存送到NIOS II軟核。NIOS II軟核借助SDRAM提供的運行空間和數據緩存空間,一方面將數據寫入SD卡;另一方面將數據發送至無線模塊。由于整個無線測試網絡是以Zigbee網絡協議為基礎構建的樹型拓撲結構,因此通過無線模塊可實現無線測試節點和網關間的組網、通信,進而完成測試數據的上傳和控制命令的接受。
數據傳輸速率問題一直是無線測試的短板,目前的商用無線測試節點通常僅用于溫度、壓力等低頻信號的采集,而對于加速度、力等高頻信號而言,受無線模塊傳輸帶寬影響,難以滿足實時傳輸的要求。而裝甲車輛底盤內許多引線困難的部件都需要對高頻振動特性進行事后分析,為了解決該問題,本文為無線測試節點設計了一種基于雙緩存重采樣的傳輸策略,即,通過控制待測信號數據流的方式,一方面將完整信號數據存入SD卡內進行本地存儲;另一方面則將重采樣的數據發送至網關。無線測試節點數據流如圖4所示。
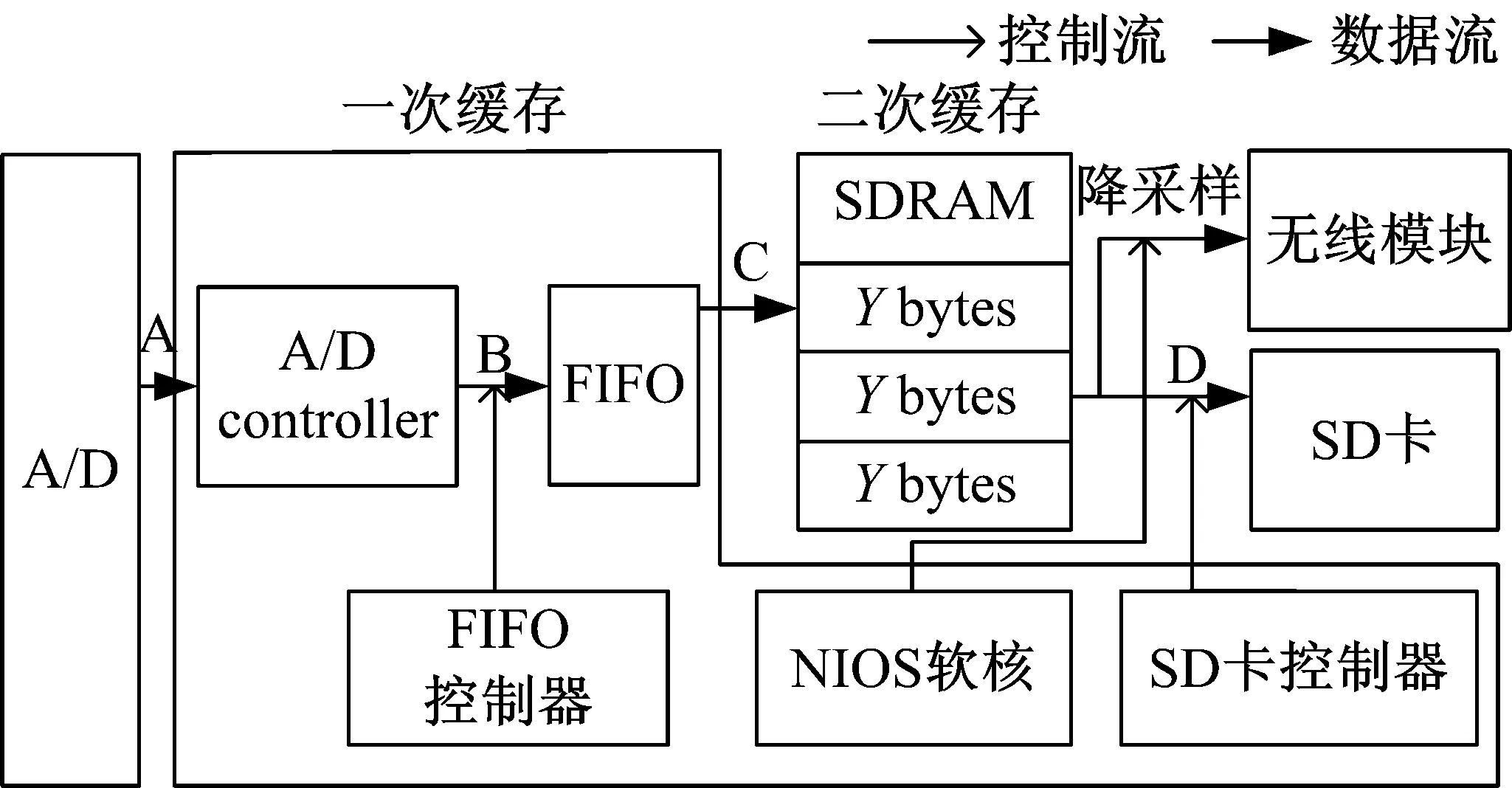
圖4 無線測試節點數據流Fig.4 Data flow of wireless sensor network test node
在該傳輸策略的控制下,節點通過FIFO和SDRAM組成的雙緩存,既可以實現對裝甲車輛底盤高頻信號的采樣和本地存儲,又可以充分利用無線模塊的帶寬,將等間隔取點后的降頻數據實時上傳。從而既滿足了頻域分析等需要高采樣率的要求,又滿足了測試人員實時觀測信號變化的要求。此外,為了提高SD卡的存儲速率,本節點使用VHDL語言設計了基于硬件模式的SD卡控制器來完成測試數據的存儲,使得SD卡的存儲速率達到2 Mbit/s,比傳統的基于軟件控制的方法有了很大提高。最終無線節點的最高采樣率可以達到1 Mbit/s。
2 測試系統的軟件設計
2.1 測控終端功能設計
測控終端作為裝甲車輛綜合測試系統的總控,需要對車輛試驗過程中待測信號的參數配置、待測信號的實時觀測、試驗數據的管理等進行實時控制。結合車輛測試的具體需求,本文對測控終端進行了如下4個功能界面的設計:試驗任務配置界面、信號實時觀測界面、試驗數據回放界面、試驗數據管理功能界面,界面具體設計如圖5所示。
圖5中,試驗任務配置界面主要用于信道參數的設置,提高了整個系統的任務適應性;信號實時觀測界面則可以提供待測信號波形的實時監控;而試驗數據回放界面和試驗數據管理界面,主要用于試驗數據的處理。
2.2 CompactRIO的軟件設計
CompactRIO嵌入式采集平臺主要包括實時處理器和FPGA兩個部分,為上下兩層架構,具體如圖6所示。其中FPGA位于底層,主要負責各個I/O模塊的控制,包括有線測試網路中模擬量采集板卡的采樣頻率配置、CAN總線的波特率配置、CAN總線測試網絡中測試數據包的解析等。而實時處理器位于上層,是整個CompactRIO嵌入式采集平臺的核心,不僅需要控制底層FPGA的工作,還需要處理FPGA獲取的有線測試網絡與CAN總線測試網絡的采樣值,以及無線網關上傳的無線測試網絡的采樣值。此外,實時處理器還需保證試驗采樣數據的實時存儲,同時通過TCP/IP協議將各個信道采樣值及時上傳,以滿足測控終端進行信號實時觀測的需求。

圖5測試系統測控終端界面
Fig.5Interfaceofmeasuringandcontrollingterminal

圖6CompactRIO嵌入式采集平臺架構
Fig.6EmbeddedplatformarchitectureofCompactRIO
綜上可知,整個CompactRIO嵌入式采集平臺中實時控制器不僅工作任務繁多,而且數據處理量大。基于此,根據試驗測試過程中控制流程與數據處理流程,本文在軟件設計過程中采用了模塊化的設計概念,使各個軟件模塊分工明確,既保證了數據流得到及時的處理,又保證了實時控制器工作的有效進行。整個嵌入式采集平臺的軟件架構如圖7所示。
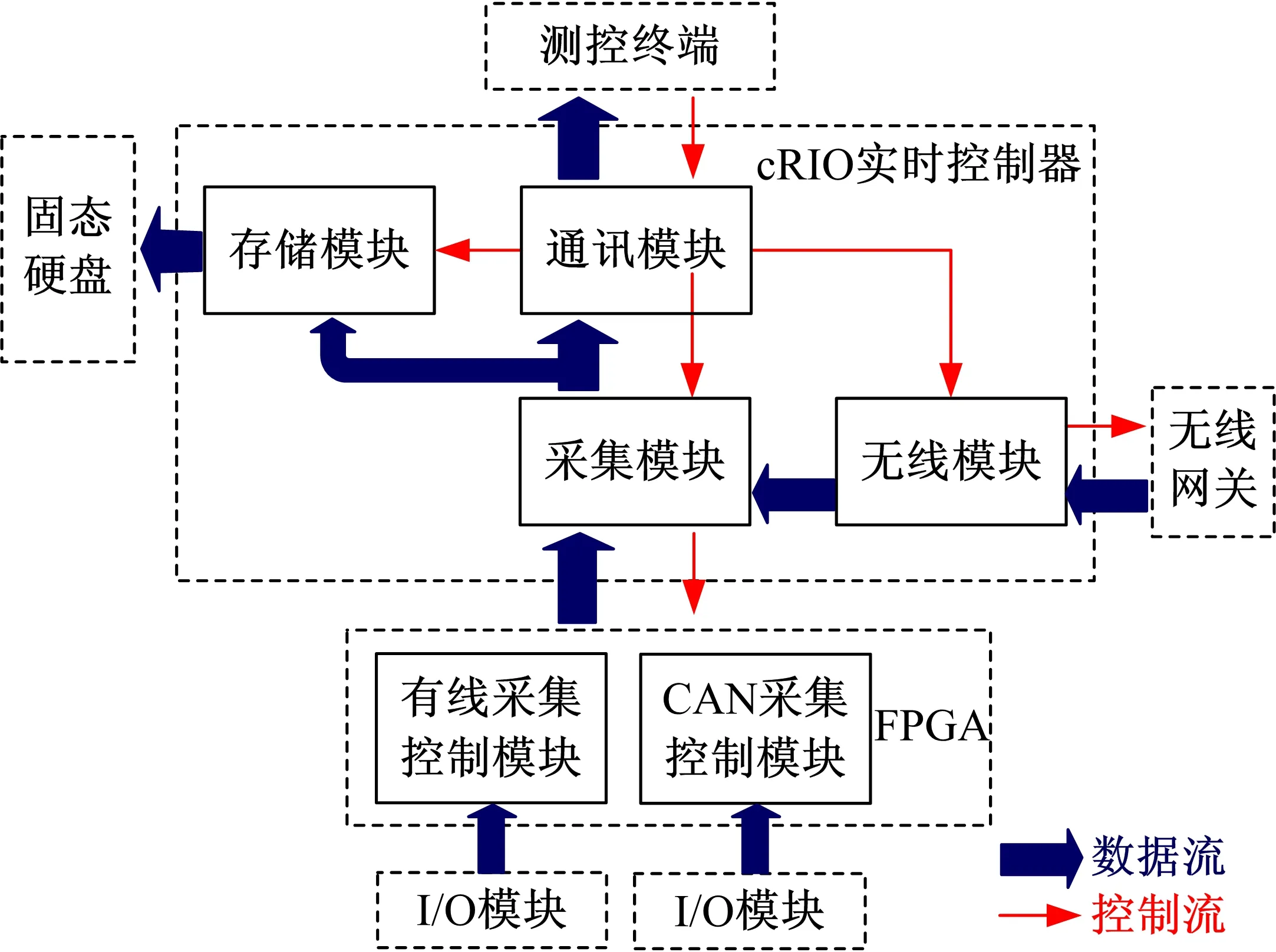
圖7 CompactRIO軟件架構Fig.7 Software architecture of CompactRIO
如圖7所示,底層FPAG劃分為有線采集控制模塊和CAN總線采集控制模塊,其中有線采集控制模塊負責配置6個模擬量采集模塊的通道使能情況與采樣頻率;CAN總線采集控制模塊則主要負責CAN數據幀的解析與總線波特率的設置。
實時控制器的程序根據功能共劃分為4個軟件模塊,其中無線模塊主要負責CompactRIO平臺與無線網關的數據交互,對來自無線測試網絡的數據包進行解析與再封包,通過隊列發送給采集模塊;采集模塊是整個系統所采數據的集中處理中心,既需要從DMA FIFO中讀取來自FPGA的采樣值,又需要從隊列中提取來自無線模塊的數據包,并對所有數據進行整理分別發送至存儲模塊和通信模塊;存儲模塊則主要負責數據的實時存儲;通信模塊則主要負責與測控終端的通信工作,通過TCP協議一方面接受控制指令并下發至各個模塊,另一方面將經采集模塊處理的數據上傳至測控終端用于實時顯示。
3 系統自適應數據流控制策略
裝甲車輛網絡化綜合測試系統是以整車作為測試對象,通過測試需求分析可知,不僅車輛的待測信號數多達220路,而且相當一部分信號的采樣頻率高達2.5 kHz,顯然整個測試系統需要具備實時處理如此龐大數據量的能力。車輛綜合測試系統運行時的采集數據流運行情況如圖8所示。從圖8可看出,有線測試網絡和CAN總線測試網絡的采集數據經DMA FIFO上傳至實時控制器,無線測試網絡的采集數據則經網線上傳至實時控制器,實時控制器內部需要對來自不同測試網絡的數據分別進行解析、封包、緩存、存儲和上傳。
因此,為了滿足測控終端的信號實時監測功能和保證測試數據實時存儲的要求,本文制定了基于整個車輛綜合測試系統的自適應數據流控制策略,共包括自適應數據緩存控制和基于最大采樣率的偽均勻采樣兩個部分。
3.1 自適應數據緩存控制
本系統作為一個能滿足各型裝甲車輛的多用途測試系統,其需要滿足不同試驗測試任務的需求,而對于不同的試驗,除了待測信號類型存在差異外,信號數量也不盡相同。因此,在開展不同的試驗測試時,實時控制器所處理的數據總量就存在區別,而這一數據量變化也直接影響了系統數據存儲和信號監測的實時性。對數據存儲和信號監測而言,其不可能滿足絕對意義上的實時性要求,在實現過程中均需要進行一定的數據緩存,將數據流按一定時間尺度(T)切割為多個數據塊,每個數據塊被處理后封裝為一個數據包,再用于后續的存儲與信號顯示。由此,本文提出的自適應數據緩存控制策略通過選擇恰當的時間尺度和控制數據包的緩存來保證系統數據存儲和信號監測的實時性要求。

圖8系統采集數據流運行圖
Fig.8Testingdatastreamoftestsystem
3.1.1 時間尺度的確定
時間尺度T為一個預設值,它的選取主要兼顧兩個方面:一方面是對信號監測而言,T值不能過大,T太大時,監測界面信號更新慢,失去了實時觀測的意義;另一方面則是考慮數據存儲,T值不能過小,T太小時,寫入相同數據量的數據時就需要多次打開數據文件,進而降低存儲效率,造成數據包累積。
結合車輛測試需求,本文在保證測試數據能夠可靠存儲的前提下,對不同測試網絡的數據流時間尺度T進行了如下選取:對有線測試網絡而言,其不僅采樣率高而且待測信號多,單位時間數據量最大,固將T值設置為0.5 s;而對CAN總線測試網絡而言,雖然通道數目多達145路,但是信號采樣頻率最高不超過100 Hz,且最低采樣頻率只有5 Hz,為了保證可以觀測出信號的大致趨勢,固將T值設為1 s;而對無線測試網絡,其單位時間數據量最小,但考慮其信號采樣率不低,在T值的選取上與有線測試網絡一樣同為0.5 s。
3.1.2 自適應數據包緩存控制
由數據流運行圖7可知,進行數據存儲時需要依次從不同測試網絡的緩存隊列中提取數據包進行處理,若按照輪詢存儲模式,那么每次打開文件均只能寫入一個數據包數據。由于不同測試網絡數據包數據量存在較大差異,這將增加系統處理相同數量數據包時的文件開啟次數,降低數據存儲效率。因此,本文基于既定時間尺度制定了自適應數據包緩存控制策略,進而均衡單次寫入試驗數據存儲文件的數據量,提高數據存儲效率,控制策略如下:首先,根據式(1)分別計算出不同測試網絡數據包的數據量Si(即時間尺度T內的采樣值總數)。隨后,以Si中的最大值Smax為基數由式(2)計算出緩存比例系數Ki,確定Smax與各S1之間的近似倍數關系。在確定緩存比例系數后,存儲軟件模塊從各測試網絡隊列中提取數據包時,只對Smax所屬的測試數據包進行實時存儲,而其他的測試數據包只有當隊列緩存個數達到對應的比例系數K時,才一次性進行存儲,從式(4)可以看出,每次寫入文件的數據量均近似相等。
(1)
Smax=max{S1,S2,…,Sn}
(2)
(3)
Smax≈Ki·Si
(4)
式中:Ti和Si為第i個測試網絡時間尺度和該尺度下的數據包數據量;fz為測試網絡中第z個信號的采樣頻率;Ki為第i個測試網絡的緩存比例系數。
在本文設計的測試系統中共包括有線、CAN總線、無線3個測試網絡,且根據確定的時間尺度可知,有線測試數據包的數據量最大,進而可以由式(3)計算出有線測試數據包與CAN總線測試數據包、無線測試數據包的緩存比例系數K1、K2。在系統進行數據存儲時,只有當CAN總線數據包緩存隊列中的數據包個數達到K1個,或者無線數據包緩存隊列中的數據包個數達到K2個時,才進行相關數據包的處理。在本系統中,有線測試數據包要遠大于CAN總線和無線測試數據包,因此通過該緩存控制策略不僅均衡了單次存儲的數據量,而且大大減少了文件的開關次數,提高了存儲效率。
3.2 基于最大采樣率的偽均勻采樣
在自適應緩存控制的過程中,每一個測試數據包中均包含了所屬測試網絡中所有信號的采樣值,但除了無線測試網絡外,無論是有線測試網絡還是CAN總線測試網絡,均存在信號采樣頻率不一致的問題,進而造成時間尺度T內不同信號的采樣值數目不同。從圖8中可以看出,有線采集模塊和CAN采集模塊獲取的信號采樣值均通過DMA FIFO上傳至實時控制器。因此,實時控制器面臨如何快速地從順序排列的采樣數據流中解析出不同信號采樣值的問題。
針對上述問題,本文提出了基于最大采樣頻率的偽均勻采樣策略,即通過補充無效采樣值的方式,使得同一測試網絡中的所有信號在時間尺度內的采樣值總數相同,就好像所有信號均是以相同的采樣頻率進行采樣一樣。策略的具體步驟實現如下:首先,根據式(5)得出測試網絡中最大的信號采樣頻率fmax;然后由式(6)和選定的時間尺度T可以確定補值基數N;再根據式(7)分別求出測試網絡內各個信號的無效采樣值個數。
fmax=max{f1,f2,…,fn}
(5)
N=fmax·T
(6)
Di=(fmax-fi)·T
(7)
式中:fi為測試網絡中第i個待測信號的采樣頻率;N為補值基數;Di為第i個待測信號一個時間尺度T內需要補充的無效采樣值個數。
確定參數后,本文通過二級緩存的方式實現偽均勻采樣策略,將時間尺度內各個信號采樣值有序寫入DMA FIFO中,為形象表示策略流程,本文通過一個包含3個信號的測試網絡示例進行說明。設測試網絡中3個信號通道的名稱分別CH1、CH2、CH3,對應采樣頻率分別為2、3、1 Hz,時間尺度T設為1 s,無效采樣值取0,由此可以算出N為3,策略流程示意圖如圖9所示。經I/O口的數據先按信號采樣率分別緩存至對應的FIFO中,然后按照信號順序依次從各FIFO中提取數據寫入DMA FIFO,即按順序從圖9中的FIFO CH1~CH3中讀取采樣值,一次一個,當CH1~CH3中的有效值讀取完后,為使其采樣值數等于N,故用無效采樣值0補齊。由此,一個時間尺度內的采樣值序列如圖9中DMA FIFO所示,實時控制器從DMA FIFO中讀取這9個采樣值后,僅需要進行一維數組重排轉換就可以形成圖中右下方顯示的二維數組,它的每一列就代表一個信號的采樣值且時序正確,而無效采樣值0均位于列尾,易于剔除。

圖9 策略流程示意圖Fig.9 Strategy process diagram
4 試驗驗證
4.1 試驗室試驗
4.1.1 驗證平臺的搭建
為了對車輛綜合測試系統進行功能性驗證,搭建了基于實驗室環境的試驗驗證平臺,試驗驗證平臺實物圖如圖10所示。位于圖10中間位置的是測試系統的主機和無線測試節點,測試系統主機外部為防護機箱,內部有CompactRIO平臺、無線網關、電源模塊以及網絡交換機等組成部件;圖10右側為系統測控終端;圖10左側為基于PXI搭建的信號仿真平臺,其主體為PXIe-8135控制器和PXIe-1062Q八槽機箱。機箱共插有4塊板卡,其中兩塊PXIe-6358模擬量采集板卡作為有線測試網絡的信號源,而另外兩塊PXI-8512雙口高速CAN通信板卡,作為模擬的車載CAN節點為CAN測試網絡提供信號。對于無線測試網絡而言,采用信號發生器作為無線測試節點的信號源。

圖10 綜合測試系統試驗驗證平臺Fig.10 Test platform of integrated test system
4.1.2 信號源設計
在充分驗證車輛綜合測試系統功能的前提下,本文針對整個測試系統中的有線、CAN總線、無線測試網絡分別進行了信號源的設計。
其中,有線測試網絡的信號源由PXIe-6358模擬量采集板卡提供,通過分線盒將72路信號線均分為4組,分別與4個板卡I/O口相連,為了區分,板卡輸出信號分別采用2、4、8、10 V的正弦信號。而對于無線測試網絡而言,由于信號數目少,因此通過信號發生器單獨提供正弦信號。
CAN總線測試網絡包括CAN1和CAN2兩個測試網絡,其網絡拓撲結構如圖11所示。PXI平臺上的兩塊PXI-8512 CAN通信板卡共包含4個獨立的CAN通信I/O口,分別模擬4個車載節點,可以完全模擬車載環境下的CAN總線測試網絡工作狀態。

圖11 CAN總線拓撲結構Fig.11 Topological structure of CAN bus
由于CAN總線測試網絡的數據傳輸需要滿足CAN通信協議才能實現,因此本文基于標準CAN2.0短幀格式,對用于傳遞信號采樣值的數據幀11位標識符和64位數據域進行了定義,如圖12所示。其中,11位標識符劃分為包類型號、數據包編號、節點號3個部分,用于區分數據包的源節點和所包含采樣值的信號名稱;而64位數據域的8個字節,按兩個字節一組進行劃分,用來存儲4個不同信號的采樣值。

圖12CAN數據幀的格式定義
Fig.12FormatdefinitionofCANdataframe
綜上所述,基于PXI的仿真平臺的信號控制界面如圖13所示。

圖13 仿真平臺控制界面Fig.13 Control interface of simulation platform
4.1.3 試驗驗證結果
本文在車輛綜合測試系統的試驗驗證過程中采用全網絡同步采集試驗,即同時開啟3個測試網絡對信號進行采集,試驗結果如圖14所示。在有線測試網絡的采集過程中,分別從4個信號I/O口對應的信號中各選取1路信號,所選實時信號的監測結果如圖14(a)所示,可見有線測試網絡能夠如實反映出4個幅值不同的正弦信號;而對CAN總線測試網絡而言, CAN1采集網絡與CAN2采集網絡中4個模擬車載節點均以最小公倍時間200 ms為周期、常量數據包的形式發送信號采樣值, 其試驗驗證測試數據包的定義如表2




圖14 試驗結果Fig.14 Test results表2 CAN總線輸入信號Table 2 Input signalfrom CAN bus

節點信號頻率發送順序號D7~D0綜合信號采集節點ID:1546(50Hz)1~4,6~9010101015030303031004040404ID:1554~1570(20Hz)1,302020202203030303404040404ID:1578~1762(5Hz)104040404動力信號采集節點ID:1604(100Hz)1~4,6~9,11~14,16~1903030303030303035,10,15,2004040404ID:1612(20Hz)1~404040404空氣濾采集節點 ID:1621(20Hz)1~305050505206060606ID:1629(5Hz)106060606傳動信號采集節點ID:1547~1555(100Hz)1~4,6~9,11~14,16~1901010101010101015,10,15,2002020202ID:1563~1595(20Hz)1~402020202
所示,其中發送順序號為200 ms內的測試數據包發送順序。隨機在CAN1和CAN2測試網絡中各選擇兩個信號,實時監測結果如圖14(b)(c)所示,以圖14(c)為例,ch1和ch12均為傳動信號采集節點的通道,分別是采樣率為100 Hz和20 Hz的信號。其中,ch1通道采集的數據為數值1、2循環;ch2通道為數值常量2,波形輸出內容與輸入信號表中定義的內容一致,證明采集有效。圖14(d)所示的無線測試網絡中隨機選擇的一個信號的波形,同樣也如實反映出了信號發生器輸出的正弦信號波形。
4.2 實車試驗
為了驗證綜合測試系統在實車條件下的工作狀態,在北京郊區坨里試驗場進行了實車數據采集試驗。試驗通過獲取某型裝甲車輛油氣彈簧的油溫、車速以及駕駛員位置處的振動加速度來驗證系統功能。其中,油氣彈簧油溫和角位移由車載已有的CAN總線采集節點獲取,通過CAN1網絡傳輸給綜合測試系統,加速度傳感器數據由綜合測試系統有線采集模塊直接采集。其中,油溫和車速的采樣頻率為10 Hz,加速度采樣頻率為10 kHz。采集的數據由綜合測試系統進行本地存儲,并同時傳輸給車載上位機進行實時顯示。試驗現場圖和試驗組成框圖如圖15所示。
試驗過程中,駕駛員以25 km/h左右車速在道路上行駛,此過程中部分采集的數據如圖16所示,CAN1網絡獲取的油溫數據和車速數據如圖16(a)和(b)所示,車速采集最大值為31 km/h,最小值為12 km/h,平均車速在25 km/h上下浮動,符合實際結果。溫度數據從74 ℃開始逐漸上升。有線采集網絡獲取的振動加速度數據為±0.2g
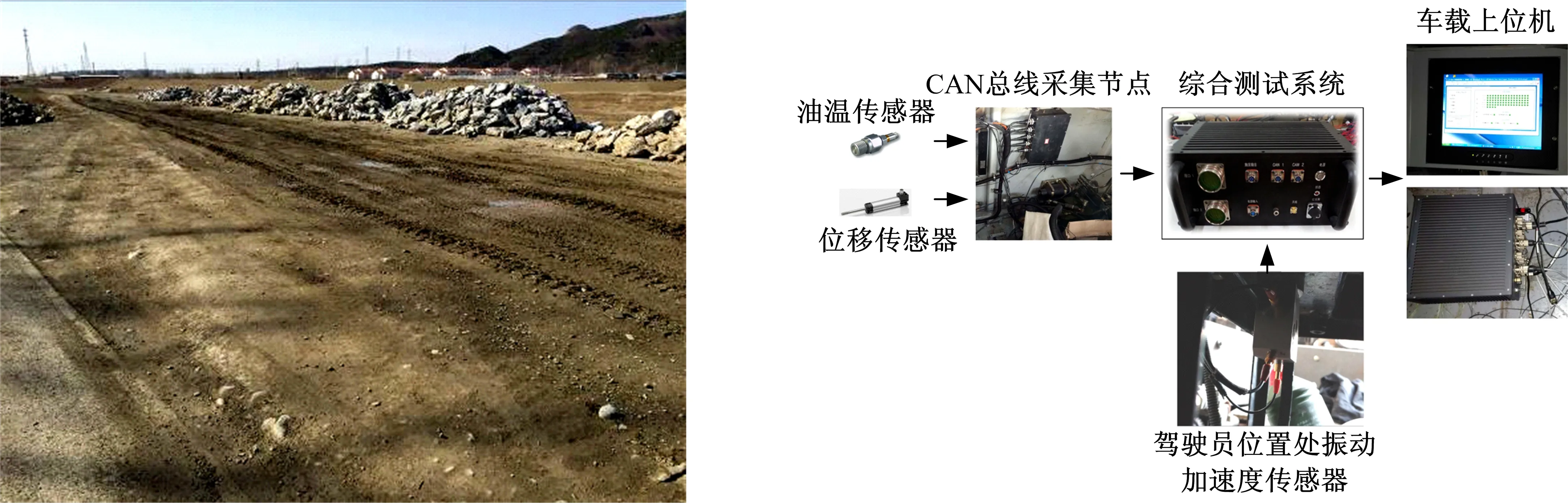
圖15實車試驗現場圖和試驗設備組成圖
Fig.15Actualvehicletestsiteandtestequipmentdiagram
(g=9.8 m2/s),如圖16(c)所示。通過實車試驗表明,本文所設計的網絡化綜合測試系統能夠在實車環境下可靠運行。



圖16 實車試驗結果Fig.16 Actual vehicle test results
5 結束語
本文以裝甲車輛野外整車動態試驗測試為背景,在充分進行測試需求分析的基礎上,設計了基于混合總線的裝甲車輛綜合測試系統。整個系統通過有線、CAN總線、無線3種方式獲取裝甲車輛的運行狀態數據,主要由測控終端、測試系統主機以及車載信號調理節點構成,并針對測點環境進行了無線測試節點和無線網關的設計。針對整車試驗測試中存在的信號數目多、采樣率不一致、傳輸數據量大的特點,制定了自適應數據流控制策略。最后,基于PXI搭建了系統試驗驗證平臺,進行了信號源設計。試驗證明,裝甲車輛綜合測試系統能夠實現整車全信號參數的采集、傳輸、存儲與顯示,系統功能齊全,運行可靠,為裝甲車輛的試驗測試提供很好的支撐。
[1] 程洪杰,趙媛.導彈特種車輛行駛平順性測試系統設計[J].測控技術,2015,34(11):48-51.
Cheng Hong-jie, Zhao Yuan. Design of riding comfort measuring system for missile special vehicle [J]. Measurement & Control Technology,2015,34(11):48-51.
[2] 童偉.車輛輪荷動態測試系統研究[J].機床與液壓,2012, 40(5):11-13.
Tong Wei. Research on dynamic testing system of vehicle’s wheel loads [J]. Machine Tool & Hydraulics,2012,40(5):11-13.
[3] 李會仙.混合動力客車數據采集與測試系統設計[D].長沙:湖南大學電子與信息工程學院,2012.
Li Hui-xian. The design of hybrid electric bus data acquisition and test system [D]. Changsha: School of Electronics and Information Engineering, Hunan University,2012.
[4] 李剛,謝永成,李光升,等. 裝甲車輛蓄電池特性參數數據采集系統設計[J]. 電源技術,2013,37(2):228-230.
Li Gang,Xie Yong-cheng, Li Guang-sheng, et al. Data acquisition systems design of armored vehicles lead-acid battery characteristic parameter [J]. Chinese Journal of Power Sources,2013,37(2):228-230.
[5] 樊新海,張傳清,王戰軍. 基于實車測試的坦克柴油機振動評估[J]. 裝甲兵工程學院學報,2013,27(1):37-40.
Fan Xin-hai, Zhang Chuan-qing, Wang Zhan-jun. Vibration evaluation of tank diesel engine based on real vehicle’s measurement [J]. Journal of Academy of Armored Force Engineering,2013,27(1):37-40.
[6] 張進秋,石志濤,劉義樂,等.駕駛操作數據采集系統設計研究[J].微型機與應用,2012,31(24):22-25.
Zhang Jin-qiu, Shi Zhi-tao, Liu Yi-le, et al. Design of driving action data sampling system [J]. Microcomputer & Its Applications,2012,31(24):22-25.
[7] 黨玲,劉云鵬,宋美球,等.車輛傳動裝置嵌入式無線扭矩測試系統研究[J].計算機測量與控制,2011,19(6):1338-1340.
Dang Ling, Liu Yun-peng, Song Mei-qiu, et al. Study on embedded wireless torque measurement system for vehicle transmission equipment [J]. Computer Measurement & Control,2011,19(6):1338-1340.
[8] 宋美球,劉云鵬,黨玲,等.特種車輛扭矩測試儀的研制[J]. 車輛與動力技術,2012(1):26-29.
Song Mei-qiu, Liu Yun-peng, Dang Ling, et al. Research on torque test instrument of special vehicle [J]. Vehicle & Power Technology,2012(1):26-29.
[9] 禹精達.傳動軸扭矩測量技術及精度分析[D].太原:中北大學信息與通信工程學院, 2012.
Yu Jing-da. The drive shaft torque measurement technology & precision analysis [D]. Taiyuan: School of Information and Communication Engineering, North University of China, 2012.
[10]Salvadori F, Gehrke C S, de Oliveira A C, et al. Smart grid infrastructure using a hybrid network architecture [J]. IEEE Transactions on Smart Grid, 2013, 4(3):1630-1639.
[11] Mirabella Orazio, Brischetto Michele. A hybrid wired/wireless networking infrastructure for greenhouse management [J]. IEEE Transactions on Instrumentation and Measurement, 2011, 60(2):398-403.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
