基于Matlab/Simulink的汽車制動防抱死研究
2018-03-10 07:22:33MengLiu
北京汽車 2018年1期
蒙 柳 Meng Liu
?
基于Matlab/Simulink的汽車制動防抱死研究
蒙 柳 Meng Liu
(陜西法士特齒輪有限責(zé)任公司 實驗中心,陜西 西安 710117)
汽車制動距離的大小主要與地面制動力、制動器制動力與附著力存在關(guān)系,而制動過程中控制滑移率在15%~20%時,車輛可獲得較好的地面附著力,從而縮短并改善汽車在制動時出現(xiàn)的制動距離過長以及發(fā)生側(cè)滑跑偏造成交通事故。利用Matlab/Simulink仿真軟件模擬車輛在行駛過程中有無防抱死制動系統(tǒng)時的制動性能,驗證利用ABS控制車輛制動時的滑移率在15%~20%具有較好的制動效果。
制動距離;側(cè)滑跑偏;滑移率;Matlab/Simulink仿真
0 引 言
汽車制動性是汽車的主要性能之一,制動性直接關(guān)系到交通安全,重大交通事故往往與制動距離太長、緊急制動時發(fā)生側(cè)滑等情況相關(guān),因此汽車的制動性是汽車安全行駛的重要保障[1]。
根據(jù)地面制動力、制動器制動力與附著力之間的關(guān)系,汽車地面制動力首先取決于制動器制動力,同時又受到地面附著條件的限制,因此只有汽車具有足夠的制動器制動力,同時地面又能提供高的附著力時,才能獲得足夠的地面制動力。
利用Matlab/Simulink仿真軟件建立相應(yīng)的防抱死ABS制動系統(tǒng)模型來驗證汽車制動性能,在防抱死制動系統(tǒng)作用下制動距離、滑移率以及制動時間的仿真驗證與不具有ABS制動系統(tǒng)模型相比對,具有ABS制動系統(tǒng)的汽車在制動過程中具有良好的制動效果。
1 車輪制動模型
不考慮空氣阻力、車輪滾動阻力及加速阻力等因素,只考慮車體縱向運動和車輪轉(zhuǎn)動,可得2自由度模型如式(1)~(3)[2],車輪制動受力情況如圖1所示。
車輛運動方程


車輪縱向摩擦力
式中,M為汽車的質(zhì)量,kg;V為汽車的速度,m/s;Fx為地面制動力,N;I為車輪轉(zhuǎn)動慣量,kg×m2;w為車輪角速度,rad/s;r為車輪滾動半徑,m;Tb為制動力矩,N×m;Tg為輪胎和地面的制動力矩,N×m;m為附著系數(shù);N為車輪對地面法向反力,N。
2 構(gòu)建制動仿真模型
2.1 車輛行駛滑移率
當車輪處于制動狀態(tài)時,車輪受到摩擦片與制動器相互摩擦產(chǎn)生的制動器制動力并引起輪胎與路面摩擦產(chǎn)生地面制動力,車輪的輪速在不斷下降,并出現(xiàn)滑移;隨著制動壓力的增加,車輪滑移的成分也在不斷增加,當制動器制動力大于路面附著能力極限時,車輪會出現(xiàn)抱死并產(chǎn)生拖滑現(xiàn)象。
在地面制動力和制動器制動力矩的共同作用下,車輪的轉(zhuǎn)速下降從而改變滑移率,滑移率的改變又導(dǎo)致地面制動力的變化[3]。經(jīng)過試驗得出,當車輪的滑移率或制動減速度在某個范圍內(nèi)變化時,汽車可獲得良好的制動效果,有效防止發(fā)生側(cè)滑現(xiàn)象以及縮短制動距離。
車輪制動時的滑移一般采用來描述[4-6],滑移率和縱向附著系數(shù)以及側(cè)向附著系數(shù)的關(guān)系如圖2所示。

式中,l為車輪的滑移率;V為整車速度,m/s;w為車輪的轉(zhuǎn)動角速度,rad/s。
2.2 防抱死制動系統(tǒng)建模
汽車未制動之前,車輪轉(zhuǎn)動時的初始角速度應(yīng)與車輛的速度相對應(yīng)。仿真模型中采用2個模塊來分別計算車輪角速度與車速。利用2個速度來計算滑移率,其由公式(5)來表示。
沒有滑移時車輪角速度
式中,v為車輪半徑劃分的車輛角速度,rad/s;v為車輛線速度,m/s;r為車輪半徑,m;w為車輪角速度,rad/s;為滑移率。
滑移率為0時,車輪速度與車速相等;當車輪抱死時滑移率為1。由圖2知理想的滑移率應(yīng)控制在15%~20%之間,即車輪轉(zhuǎn)速在數(shù)值上等于0.8倍非制動條件下與其車速相同的車輪轉(zhuǎn)速。從而最大限度地減少輪胎和路面之間的附著性,并最大限度地利用摩擦力矩減小制動距離。
輪胎與路面之間的摩擦系數(shù)u為滑移率的一個經(jīng)驗函數(shù),即滑移率曲線。通過Matlab中變量使用Simulink框圖建立滑移率曲線,該模型的摩擦力f為輪胎垂向作用力與摩擦系數(shù)u的乘積,作用于輪胎的周緣。滾動阻力除去車身質(zhì)量得到車輛減速度,并通過積分獲得車輛的速度[7],防抱死制動系統(tǒng)車輪速度模型如圖3所示。
該模型根據(jù)實際的滑移和所需的滑移之間的誤差采用一個理想的魯棒防抱死制動控制器,為使制動距離最小化則使滑移率的值控制在接近滑移率曲線的峰值,一般出現(xiàn)在滑移率為15%~20%。防抱死制動系統(tǒng)模型如圖4所示。
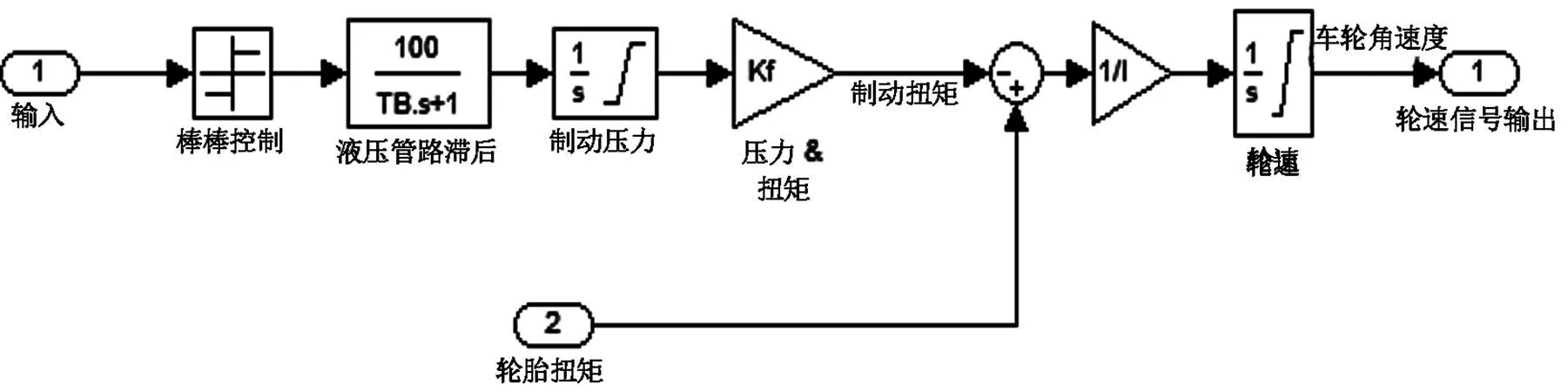
圖3 防抱死制動系統(tǒng)車輪速度模型

圖4 防抱死制動系統(tǒng)模型
由于在實際車輛行駛過程中,滑移率是不能直接測量獲得的,所以此控制幾何算法是不實際的。
控制制動壓力的變化率,模型從實際滑動減去期望滑動并將信號轉(zhuǎn)化為Bang-Bang控制(+ 1或-1,取決于正負誤差);這個開/關(guān)速率通過1階滯后表示與制動系統(tǒng)的液壓管路相關(guān)聯(lián)的延遲;該模型集成過濾率,以產(chǎn)生實際的制動壓力,由此產(chǎn)生的信號乘以制動活塞面積和半徑相對于車輪制動力矩系數(shù)。
3 仿真結(jié)果驗證
3.1 具有防抱死制動系統(tǒng)的仿真
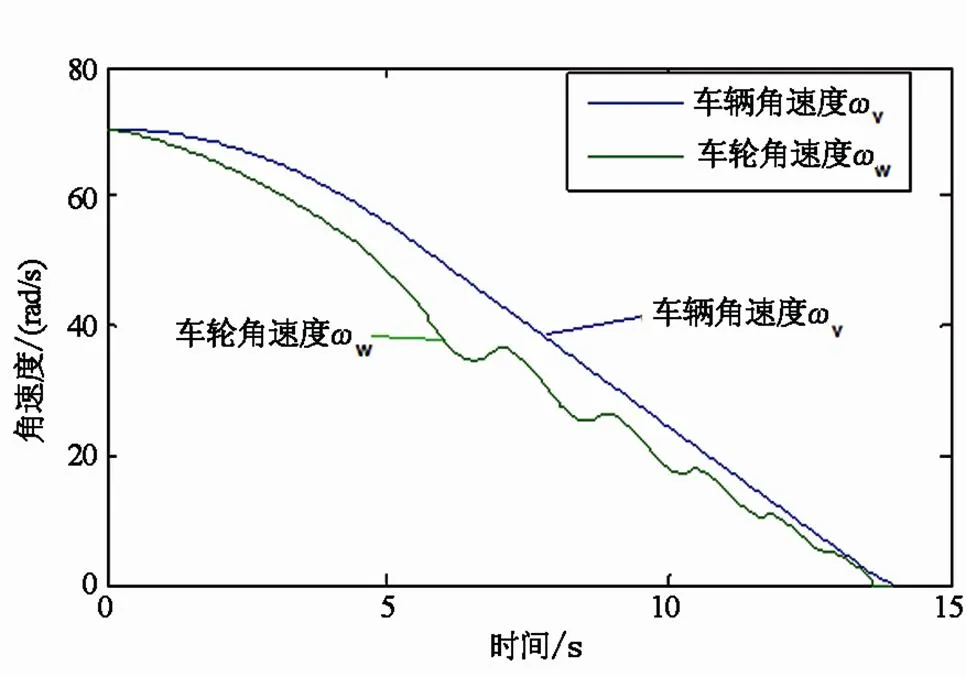
圖5 具有防抱死制動系統(tǒng)的車輛與車輪速度
防抱死制動系統(tǒng)模型的仿真結(jié)果如圖5~6所示,車輪角速度與車輛角速度對應(yīng),在車輪沒有抱死制動的情況下車輪速度始終低于車身速度,車輛行駛速度由70 km/h降至0 km/h的時間低于15 s;并且在制動過程中滑移率能夠保持在20%左右。
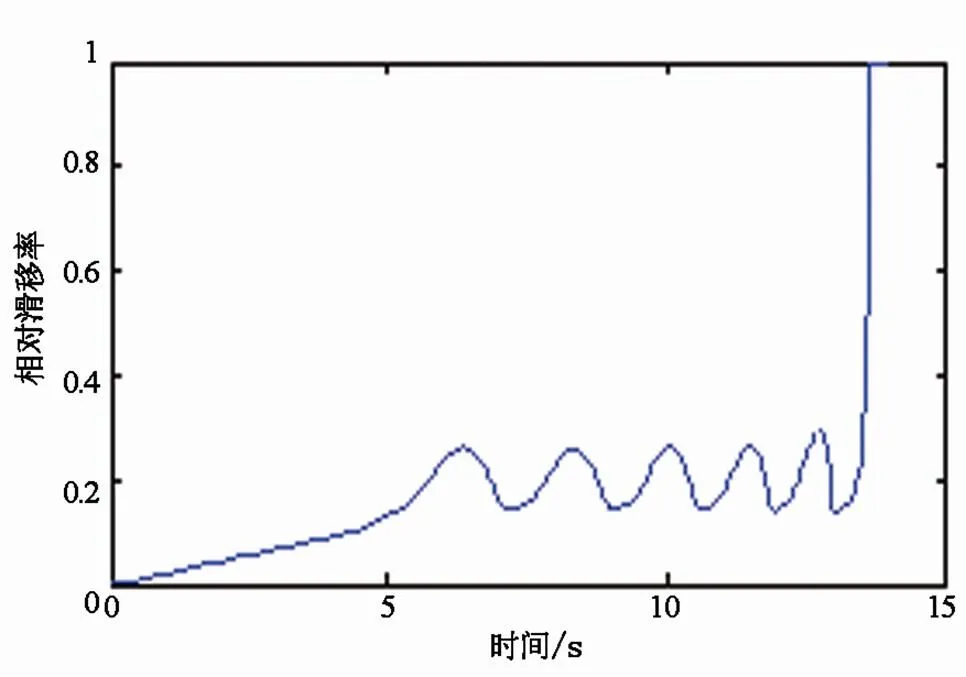
圖6 具有防抱死制動系統(tǒng)的滑移率仿真結(jié)果
3.2 沒有防抱死制動系統(tǒng)的仿真

圖7 沒有防抱死制動系統(tǒng)的車輛與車輪速度
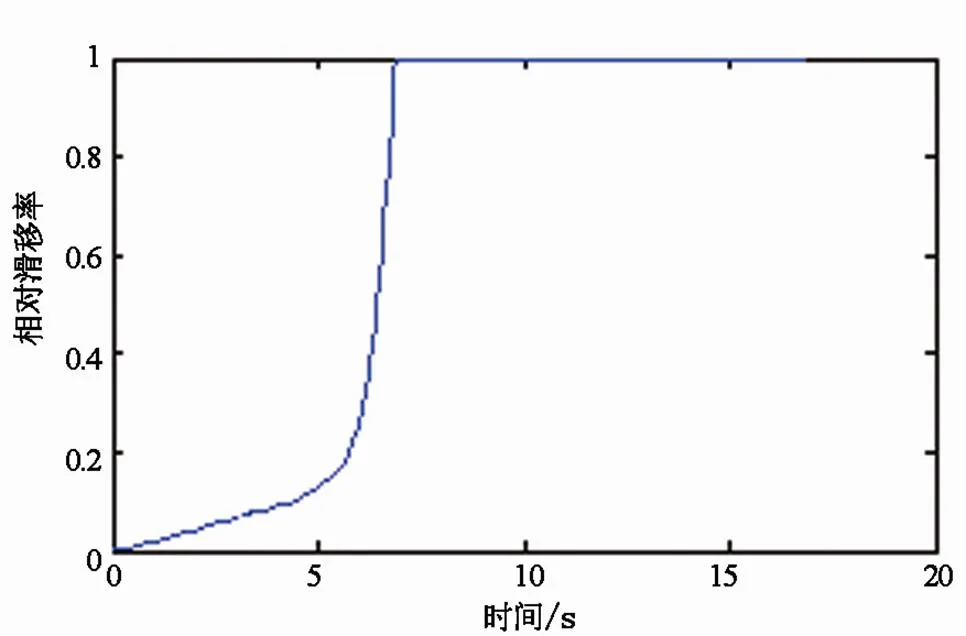
圖8 沒有防抱死制動系統(tǒng)的滑移率仿真結(jié)果
不具有防抱死制動系統(tǒng)的模型仿真結(jié)果如圖7~8所示,車輪在第7 s左右抱死,當車輪抱死之后可以利用的地面附著力瞬間下降,車輛滑移率急劇變?yōu)?作純滑動;車輛行駛速度由70 km/h降至0 km/h的時間超過16 s。
3.3 制動距離

圖9 車輛制動距離仿真結(jié)果
根據(jù)圖9中車輛制動距離仿真結(jié)果顯示,不具有ABS的車輛制動距離比具有ABS的車輛制動距離超出40 m左右,制動時間超出3 s。
4 結(jié) 論
1)基于Matlab/Simulink以及汽車動力學(xué)相關(guān)理論建立汽車縱向動力學(xué)模型,仿真得到車速及汽車前、后軸垂直力。
2)搭建與所得車速及前、后軸垂直力相應(yīng)的輪胎模型,并詳細闡述輪胎滑移速度模型、接觸點滑移模型以及低速下滑移率修正模型等子模型。
3)汽車縱向動力學(xué)模型與輪胎模型相互關(guān)聯(lián),是整個汽車模型中的關(guān)鍵部分。通過Matlab/ Simulink建立的輪胎模型能夠?qū)Σ煌瑺顟B(tài)下的輪胎滑移狀態(tài)進行研究,具有一定的理論參考價值。
[1]余志生. 汽車理論[M]. 北京:機械工業(yè)出版社,2009.
[2] Thomas D. Gillespi. 車輛動力學(xué)基礎(chǔ)[M]. 北京:清華大學(xué)出版社,2006.
[3]侯光鈺. 車輛防抱死制動系統(tǒng)的控制技術(shù)研究[D]. 南京:東南大學(xué),2005.
[4]許男. 復(fù)合工況下輪胎穩(wěn)態(tài)模型研究[D]. 長春:吉林大學(xué),2012.
[5]E. Bakker,H. B. Pacejka,L. Nyborg. Tyre Modeling for Use in Vehicle Dynamics Studies [J]. SAE paper,1987.
[6]H. J. Hong,H. Y. Jo. Prediction of Friction Between Tire and Road Using Powertrain Model [J]. Proc. Advanced Vehicle Control,1998:135-140.
[7] Chankyu Lee,Karl Hedrick,Kyongsu Yi. Real-time Slip-based Estimation of Maximum Tire-road Friction Coefficient [J]. IEEE/ASME Transactions On Mechatronics,1960,9(2):454-458.
2017-11-02
U463.5:TP391.9
A
1002-4581(2018)01-0043-04
10.14175/j.issn.1002-4581.2018.01.012
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37