基于SIMPACK和Simulink聯(lián)合仿真的擺式車輛曲線通過研究
2018-03-06 02:25:35胡驍檣倪文波王雪梅曲文強
鐵道機車車輛 2018年1期
關(guān)鍵詞:轉(zhuǎn)向架模型
胡驍檣, 倪文波, 王雪梅, 曲文強
(1 西南交通大學(xué) 機械工程學(xué)院, 成都 610031;2 中車青島四方機車車輛股份有限公司 國家工程研究中心, 山東青島 266111)
自1997年以來,我國鐵路進行了6次大提速,并開行了2萬km多的高速鐵路。高鐵的快速發(fā)展為人們的出行帶來便利,產(chǎn)生了巨大的社會效益,但全國仍然有12萬km多的既有線鐵路,線路等級低,尤其在山區(qū)的鐵路曲線半徑小,限制了列車運行速度的提高。國外的研究及實際運行狀況表明,擺式列車可以在對線路作出相對較小的改造下顯著提高既有線列車的運行速度[1-3]。擺式列車的優(yōu)勢在于以高于普通列車的速度通過小半徑曲線,仍然保證旅客乘坐舒適度,并且線路改造投資小,提速效果顯著[4-5]。擺式列車發(fā)展至今,國外的擺式技術(shù)越來越成熟,在多個國家得到很好的應(yīng)用。波蘭國家鐵路公司PKP于2011年5月30日向阿爾斯通公司訂購了20列ETR610擺式列車并于2013年交付第一列[6]。可以看出,擺式列車目前仍然有一定的市場需求,不斷有新的車型出現(xiàn)。
盡管從上世紀90年代開始,國內(nèi)的學(xué)者對擺式列車進行了大量的研究[7-11],但種種原因?qū)е聰[式列車在中國至今沒有得到實際應(yīng)用。繼續(xù)對擺式列車曲線通過時的性能進行研究,可為將來車輛的順利研發(fā)提供技術(shù)儲備。隨著計算機仿真技術(shù)的發(fā)展,采用SIMPACK軟件建立的車輛動力學(xué)模型已經(jīng)在鐵道車輛開發(fā)中得到了很好的運用。進一步采用MATLAB軟件建立傾擺控制系統(tǒng)的模型,采用聯(lián)合仿真的軟件技術(shù),將能夠?qū)囕v在通過曲線時列車的實際運行狀態(tài)進行分析。因此本文將在介紹擺式列車轉(zhuǎn)向架結(jié)構(gòu)的基礎(chǔ)上,建立車輛的SIMPACK模型與傾擺作動系統(tǒng)Simulink模型的聯(lián)合仿真模型,研究傾擺作動系統(tǒng)對擺式列車運行性能的影響。
1 擺式轉(zhuǎn)向架結(jié)構(gòu)
與傳統(tǒng)車輛轉(zhuǎn)向架不同,除了輪對軸箱裝置、一系懸掛、構(gòu)架、二系懸掛、抗蛇行減振器、抗側(cè)滾扭桿等部件外,擺式列車的轉(zhuǎn)向架構(gòu)架與車體之間增加了擺枕、吊桿和傾擺作動器。擺枕通過呈八字形對稱布置的4根吊桿安裝在轉(zhuǎn)向架的構(gòu)架上,車體通過空氣彈簧坐落在擺枕上,它們共同構(gòu)成四連桿機構(gòu)。擺枕和構(gòu)架之間安裝有車體傾擺作動器,傾擺作動器產(chǎn)生伸縮運動,使擺枕通過四連桿機構(gòu)開始傾擺,繼而帶動車體產(chǎn)生傾擺。具體結(jié)構(gòu)如圖1所示。
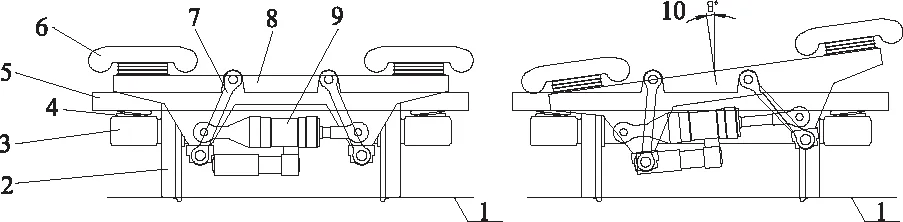
1-軌面;2-輪對;3-軸箱;4-一系懸掛;5-構(gòu)架;6-空氣彈簧;7-吊桿;8-擺枕;9-傾擺作動器;10-向左傾擺8°。圖1 轉(zhuǎn)向架結(jié)構(gòu)圖
2 傾擺作動系統(tǒng)
擺式列車的傾擺作動系統(tǒng)由機電式作動器和控制計算機組成,核心部件是機電式作動器,其具有體積小、質(zhì)量輕、可控性好、集成度高等優(yōu)點。其結(jié)構(gòu)如圖2所示。
安裝在轉(zhuǎn)向架上的加速度傳感器將未平衡加速度信號傳遞給控制計算機;控制計算機給伺服驅(qū)動器發(fā)出控制指令,驅(qū)動伺服電機旋轉(zhuǎn);伺服電機經(jīng)過傳動比為12.5的二級齒輪減速后帶動螺母旋轉(zhuǎn),滾珠絲桿機構(gòu)將電機的旋轉(zhuǎn)運動轉(zhuǎn)變?yōu)榻z桿的直線運動,從而使作動器產(chǎn)生伸縮運動,借助四連桿機構(gòu)實現(xiàn)車體傾擺;通過位移傳感器的反饋信息完成車體傾擺角度的伺服控制。傾擺作動系統(tǒng)原理如圖3所示。
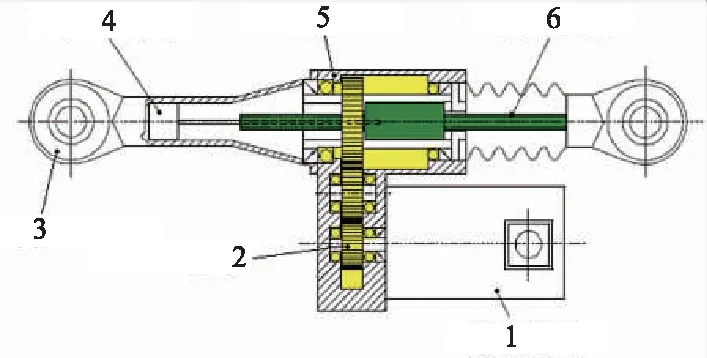
1-伺服電機;2-齒輪;3-鉸座;4-位移傳感器;5-機體;6-滾珠絲桿。圖2 機電式作動器結(jié)構(gòu)圖
根據(jù)對四連桿機構(gòu)進行受力分析及運動分析,可得出作動器的最大輸出力約為80 kN,在車體傾擺8°時作動器的最大行程為±153 mm,且作動器的位移與車體傾擺角度呈線性關(guān)系,從而可將車體傾擺角度值轉(zhuǎn)化為作動器位移值,便于測量與伺服控制[12]。據(jù)此選擇直徑為63 mm、導(dǎo)程為10 mm的絲桿。根據(jù)傾擺作動系統(tǒng)的性能要求,將絲桿的運動速度設(shè)為80 mm/s。選用伺服電機MDD093C-N-060,其額定扭矩19.5 N·m,額定轉(zhuǎn)速為6 000 r/min。

圖3 傾擺作動系統(tǒng)原理圖
控制計算機采用PID控制策略[13-17];伺服驅(qū)動器和機械傳動部分可看作比例環(huán)節(jié);絲桿螺母看作積分環(huán)節(jié)。建立如圖4所示的傾擺系統(tǒng)方框圖。
圖4中,K1為PID控制器比例系數(shù),K2為伺服驅(qū)動器系數(shù),L為絲桿的導(dǎo)程,i為齒輪箱減速比,KE為電機感應(yīng)電壓常數(shù),Tm為電機時間常數(shù),Kf為位移反饋系數(shù),s為拉普拉斯常數(shù)。
在MATLAB軟件中建立傾擺系統(tǒng)的Simulink數(shù)學(xué)仿真模型,進行閉環(huán)性能測試。給系統(tǒng)施加單位階躍信號和梯形信號,觀察系統(tǒng)的跟隨響應(yīng)特性,仿真結(jié)果如圖5所示。

圖4 傾擺系統(tǒng)方框圖
從圖5可以看出,單位階躍信號的響應(yīng)延遲時間為0.2 s,梯形信號的滯后時間非常小,表明該機電式作動系統(tǒng)響應(yīng)迅速,動態(tài)跟隨性好,滿足車體傾擺動作的要求。

圖5 系統(tǒng)跟隨響應(yīng)
3 擺式車輛的動力學(xué)模型
在建立車輛模型時,將擺式車輛系統(tǒng)中除彈性元件外的各個部分如車體、構(gòu)架、擺枕、吊桿、軸箱和輪對等都視為剛體;考慮輪軌接觸幾何關(guān)系非線性、輪軌蠕滑非線性和懸掛非線性,運用多體動力學(xué)軟件SIMPACK建立擺式車輛的動力學(xué)模型,如圖6所示。
根據(jù)文獻[7],擺枕的自由度可以去掉,將吊桿和作動器的影響歸結(jié)到傾擺機構(gòu)對車體重心和擺心的影響上。因此拖車轉(zhuǎn)向架共有34個獨立自由度,如表1所示。

圖6 擺式車輛動力學(xué)模型

伸縮橫移浮沉側(cè)滾點頭搖頭自旋擾動備注車體XcYcZcθcφcψc--構(gòu)架XbiYbiZbiθbiφbiψbi-i=1,2輪對XwiYwi---ψwiβwii=1~4
根據(jù)表1建立擺式車輛的動力學(xué)模型,車體的動力學(xué)方程為
(2)
式中,mc為車體質(zhì)量;Ici(i=x,y,z)為車體繞x,y,z軸的轉(zhuǎn)動慣量;Xc、Yc、Zc為分別為車體的縱向、橫向、垂向位移;θc、φc、ψc分別為車體的側(cè)滾角、點頭角、搖頭;∑Fci、∑Mci(i=x,y,z)為車體外載荷項。
構(gòu)架和輪對的動力學(xué)方程形式與車體相似,可以參考文獻[8],在此不再贅述。
4 聯(lián)合仿真分析
多體動力學(xué)仿真可以實現(xiàn)模型非線性化,較全面地反映整車動態(tài)特性。應(yīng)用SIMPACK和MATLAB軟件分別建立擺式車輛的動力學(xué)模型和傾擺作動系統(tǒng)數(shù)學(xué)模型,可以發(fā)揮各自的優(yōu)點,計算精度較高。調(diào)用Simulink模塊庫中的simat模塊建立數(shù)據(jù)交換的通道,將Simulink中的傾擺控制信號通過simat傳遞給SIMPACK中的動力學(xué)模型,使車體產(chǎn)生傾擺,在SIMPACK動力學(xué)模型中設(shè)置位移傳感器,將信號反饋給Simulink控制模型,進行伺服控制,從而建立整個系統(tǒng)的聯(lián)合仿真模型,如圖7所示。
為了研究傾擺作動系統(tǒng)對擺式車輛曲線通過性能的影響,根據(jù)不同的線路曲線半徑設(shè)置了不同的超高和緩和曲線,具體的線路條件如表2所示。線路設(shè)置時參考《鐵路線路設(shè)計規(guī)范》,在較好線路上運行的車輛,未平衡離心加速度需小于0.05g(g為重力加速度),也即欠超高需小于75 mm,為安全起見,本計算各線路最大欠超高均取75 mm。在保證未平衡加速度相同的條件下,按傾擺0°、傾擺3°和傾擺6.5° 3種工況分別進行聯(lián)合仿真分析,得到在相同欠超高值時3種工況在不同線路條件下的最大通過速度,如表3所示。

圖7 聯(lián)合仿真模型

m
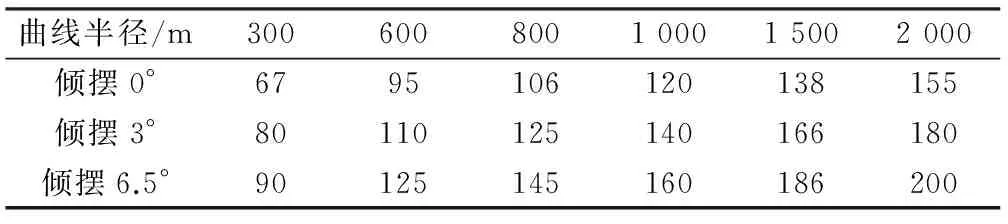
表3 曲線最大通過速度 km·h-1
車輛從直線進入曲線時,在直緩點開始傾擺,到緩圓點時傾擺到所需角度,并在圓曲線上保持傾擺角度不變,出曲線時,在圓緩點開始回擺,直到緩直點回復(fù)到無擺角狀態(tài)。
根據(jù)GB 5599-85規(guī)定,擺式車輛通過曲線時的動力學(xué)評價指標(biāo)包括:
(1) 輪軌橫向力Q
按車輛通過時對線路的影響,輪軌橫向力Q允許限度采用以下標(biāo)準(zhǔn):
Q≤19+0.3Pst
(3)
式中Pst為車輪平均靜載荷,kN。
轉(zhuǎn)向架軸質(zhì)量為15.5 t,則Q=41.79 kN。
(2) 輪軸橫向力H
最大輪軸橫向力H按以下標(biāo)準(zhǔn)評定:
(4)
式中Pst1、Pst2分別為車輪左輪、右輪靜載荷,kN。
轉(zhuǎn)向架軸質(zhì)量為15.5 t,則H=77.31 kN。
(3) 脫軌系數(shù)Q/P、輪重減載率△P/P和傾覆系數(shù)D的限度值如表4所示。
擺式車輛在3種傾擺角度下進行聯(lián)合仿真,線路上施加美國五級軌道譜激擾,保證乘客的乘坐舒適度相同,即乘客的未平衡加速度均為0.05g,按表4中的速度通過曲線,分析擺式車輛的動力學(xué)性能。
由圖8可知,在相同的線路條件下,隨著擺式車輛的傾擺角度增大,各項動力學(xué)性能指標(biāo)也相應(yīng)增大,但都在標(biāo)準(zhǔn)允許的范圍內(nèi),而相應(yīng)的曲線通過速度卻可得到提高;在傾擺角度一定的條件下,隨著曲線半徑的減小,各項動力學(xué)指標(biāo)均增大,并且在小半徑曲線上輪軌磨耗更加嚴重,甚至出現(xiàn)輪緣磨耗,這可能是由于列車在傾擺過程中重心向曲線內(nèi)側(cè)偏移,加劇了輪軌磨耗。

表4 評價指標(biāo)限度值

圖8 曲線通過動力學(xué)性能分析結(jié)果
5 結(jié) 論
建立了擺式車輛的SIMPACK動力學(xué)模型和Simulink傾擺控制模型,采用聯(lián)合仿真的方法對擺式車輛在曲線運行時的性能進行了分析。結(jié)果表明,采用擺式車輛可以在滿足乘坐舒適度的情況下提高曲線通過速度,并且各項動力學(xué)指標(biāo)均滿足標(biāo)準(zhǔn)要求,進而提高列車的旅行速度。因此,發(fā)展擺式列車是提高既有線列車旅行速度的有效途徑。
[1] 馮奕續(xù). 擺式列車與鐵路既有線提速[J]. 鐵道運輸與經(jīng)濟, 2003, 25(6): 23-24.
[2] 李芾, 付茂海, 倪文波. 擺式列車及其在中國的運用前景[J]. 學(xué)術(shù)動態(tài), 2004(3): 1-3,37.
[3] 吳慶杰. 擺式列車重新登上中國鐵路發(fā)展舞臺的探究 [J]. 中國科技財富, 2011(22):245.
[4] 陳文豪. 擺式列車在鐵路曲線運行的優(yōu)勢[J]. 路基工程, 2008(4): 22-23.
[5] Rickard Persson, Roger M, Goodall, KIMIAKI sasaki. Carbody tilting - technologies and benefits [J]. Vehicle System Dynamics, 2009, 47(8): 949-981.
[6] Wikipedia. Pendolino[EB/OL]. (2017-04-09)[2017-05-04]. https:∥en.wikipedia.org/wiki/Pendolino.
[7] 周和超, 梁寒冰. 基于Adams與MATLAB聯(lián)合仿真的擺式列車動力學(xué)計算[J].鐵道機車車輛, 2010, 30(2): 33-37.
[8] 卜繼玲. 主動懸掛擺式列車組運行性能的研究[D]. 成都:西南交通大學(xué), 2001.
[9] 劉宏友, 曾京, 鄔平波. 擺式客車曲線通過動力學(xué)研究[J]. 鐵道學(xué)報, 2001, 23(5):22-26.
[10] 羅仁, 曾京. 擺式列車主動傾擺控制的數(shù)值仿真研究[J]. 鐵道學(xué)報, 2006, 28(5): 28-34.
[11] 倪文波, 耿標(biāo). 擺式列車傾擺控制系統(tǒng)[J]. 西南交通大學(xué)學(xué)報, 2000, 35(6): 642-646.
[12] 倪文波,王雪梅. 高速列車網(wǎng)絡(luò)與控制技術(shù)[M](第二版). 成都:西南交通大學(xué)出版社,2010: 323-324.
[13] Cheli F, Diana G, Resta F. Numerical Model of a Tilting Body Railway Vehicle Compared with Rig and on Track Tests[J]. Vehicle System Dynamics, 2001, 35(6): 417-442.
[14] Zolotas A C, Goodall R M & Halikias G D. New Control Strategies for Tilting Trains[J]. Vehicle System Dynamics, 2002, 37(sup1): 171-182.
[15] Zamzuri H, Zolotas A C & Goodall R M. Intelligent Control Approaches for Tilting Railway Vehicles[J]. Vehicle System Dynamics, 2006, 44: 834-842.
[16] Hairi Zamzuri, Argyrios Zolotas, Goodall R M. Tilt control Design for High-speed Trains: A study on Multi-objective Tuning Approaches[J]. Vehicle System Dynamics, 2008, 46(1): 535-547.
[17] Hassan F, Zolotas A C & Margetts R M. Optimised PID Control for Tilting Trains[J]. Systems Science & Control Engineering, 2017, 5(1): 25-41.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
裝備制造技術(shù)(2021年2期)2021-07-21 05:38:24
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
制造技術(shù)與機床(2019年12期)2020-01-06 03:17:46
西南交通大學(xué)學(xué)報(2018年5期)2018-11-08 10:58:26
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
現(xiàn)代工業(yè)經(jīng)濟和信息化(2016年1期)2016-05-17 05:33:38
鐵道運營技術(shù)(2015年3期)2015-12-23 09:27:14
