基于傳遞系數(shù)方法的貫流轉(zhuǎn)槳式水輪機(jī)的仿真模型
2018-03-04 12:26:48,
電氣開關(guān) 2018年4期
,
(廣西大學(xué)電氣工程學(xué)院,廣西 南寧 530004)
1 引言
貫流式水輪機(jī)是近幾年新發(fā)展起來的一類水輪機(jī),是一種低水頭、大流量、高比速的水輪機(jī)[1]。貫流式水輪機(jī)由于基本沒有設(shè)置水流轉(zhuǎn)彎的流道,從流道進(jìn)口到尾水管出口,水流幾乎呈直線流動的形式,水流動能的損失很小,水力的效率很高。貫流式水輪機(jī)的流道形式和軸流式水輪機(jī)不同,但是對于貫流式水輪機(jī)而言其結(jié)構(gòu)上與軸流式水輪機(jī)依然有很多相似的地方,例如,貫流式水輪機(jī)的轉(zhuǎn)輪與軸流式水輪機(jī)的相同,因此從水力機(jī)械的角度來看,其裝置的過渡過程與軸流式水輪機(jī)有許多相近之處[1]。
貫流式水輪機(jī)在國內(nèi)外的發(fā)展與應(yīng)用非常迅速,國外25米水頭以下的水頭開發(fā),貫流式水輪機(jī)已經(jīng)基本上取代了軸流式水輪機(jī)。貫流式機(jī)組在1960年代至1990年代發(fā)展最為迅猛,這一時期投入運(yùn)行的貫流機(jī)組,最大單機(jī)容量達(dá)到了65.8Mw(燈泡貫流,日本只見),最大水輪機(jī)直徑8.2米(豎井貫流,美國墨累),最高工作水頭達(dá)到22.45米(燈泡貫流,日本新鄉(xiāng)第二)[2]。
國內(nèi)從1960年代開始研究貫流式水輪機(jī),1983年湖南馬跡塘水電站和1984年廣東白垢電站的建成標(biāo)志著國內(nèi)具有研制大容量的貫流式水輪機(jī)的能力。在最近的幾十年里,國內(nèi)的貫流式水輪機(jī)的技術(shù)水平得到了長足的發(fā)展,通過引進(jìn)設(shè)備,合作生產(chǎn)和自行研發(fā),國內(nèi)建成了安裝有大型貫流式水輪機(jī)的水電站數(shù)十座,如王甫洲、長洲、洪江等。
貫流式機(jī)組的結(jié)構(gòu)特征決定了他的過渡過程具有許多不同于常規(guī)機(jī)組的特點(diǎn):
(1)相比于其他類型的水輪機(jī),貫流式水輪機(jī)機(jī)組飛輪力矩偏小,轉(zhuǎn)子的慣性常數(shù)值僅為1~2s,水體附加慣性所占比重大,相比于立式發(fā)電機(jī)組的慣性系數(shù)7~10s,導(dǎo)致了其甩負(fù)荷時升速極快,甩負(fù)荷過程極短。
(2)由于水頭低、流量大,貫流式水輪機(jī)裝置中的引水系統(tǒng)具有相當(dāng)大的水流慣性常數(shù),這也導(dǎo)致了水擊效應(yīng)中的壓力相對值也很大,且在上游也容易引起浪涌。如果甩負(fù)荷時導(dǎo)葉關(guān)閉過快,尾水管進(jìn)口的水壓降低的值將很大,甚至可能引起斷流反水擊效應(yīng)。
(3)水輪機(jī)的轉(zhuǎn)輪前面壓力較立軸式的要小,轉(zhuǎn)輪后部壓力差別很小。
由于以上的這些特點(diǎn),貫流式水輪機(jī)的機(jī)組動態(tài)附加載荷很大,其甩負(fù)荷過渡過程的控制十分重要。
對于現(xiàn)有的電力系統(tǒng)的相關(guān)研究而言,在不同類型水輪機(jī)的研究深度上面是很不平衡的,對于傳統(tǒng)類型的一些水輪機(jī)研究的比較深入。例如,對混流式水輪機(jī)的研究最為全面,由于使用的時間很長,因此其特性曲線比較完整,對不同直徑和功率的機(jī)組的傳遞系數(shù)有著很全面的了解。相比較而言,對于軸流式水輪機(jī)的研究要比混流式水輪機(jī)的研究要晚上許多,但是隨著軸流式水輪機(jī)的使用,對于電力系統(tǒng)而言,軸流式水輪機(jī)的仿真模型也有了深入研究,例如文獻(xiàn)[3]中對軸流轉(zhuǎn)漿式水輪機(jī)的仿真模型的建立就有了比較深入的介紹。但是對于貫流式水輪機(jī)而言,卻一直缺少介紹貫流式水輪機(jī)仿真模型的相關(guān)論文,本文力圖從貫流式水輪機(jī)的仿真模型的建立來入手,介紹一種利用傳遞系數(shù)來建立仿真模型的方法,建立一種可以用于水輪機(jī)小波動仿真的模型,對雙控制型的水輪機(jī)模型采用導(dǎo)葉和槳葉協(xié)聯(lián)控制。然后與二階發(fā)電機(jī)模型構(gòu)成一個完整的原動機(jī)-發(fā)電機(jī)系統(tǒng),利用多指標(biāo)非線性控制方法,形成一個協(xié)調(diào)控制的控制律。進(jìn)行三相短路擾動的仿真比較這種非線性控制方法和PID控制方法,來驗(yàn)證水輪機(jī)模型的正確性。
2 貫流轉(zhuǎn)槳式水輪機(jī)的數(shù)學(xué)模型
雖然現(xiàn)代流體力學(xué)的發(fā)展使得研究水力機(jī)械時,已經(jīng)可以利用相關(guān)的解析方法來描述水輪機(jī)的運(yùn)動形式,但是對于水輪機(jī)而言目前仍然主要依靠模型試驗(yàn)方法來定量描述水輪機(jī)的工作特性[2]。同時,應(yīng)當(dāng)指出的是這些特性曲線描述的是水輪機(jī)的穩(wěn)態(tài)工況,當(dāng)水輪機(jī)的角速度變化量較小時,一般取其為額定值,這時其標(biāo)幺值為1。理論計算的誤差與實(shí)測結(jié)果差別不大,說明在分析時采用這類簡化是可以接受的。
2.1 水輪機(jī)的狀態(tài)方程
根據(jù)文獻(xiàn)[4]中的相關(guān)章節(jié)對水輪機(jī)狀態(tài)方程的分析,有
一般來講,水輪機(jī)的動態(tài)特征用下面的兩個方程來表示:
轉(zhuǎn)矩特性:
Mt=Mt(α,n,φ,H)
(1)
流量特性:
Qt=Qt(α,n,φ,H)
(2)
在上面兩式中,α表示導(dǎo)葉開度角,n表示水輪機(jī)轉(zhuǎn)速,φ表示槳葉開度角,H表示水頭。上面的狀態(tài)方程可以作為水輪機(jī)狀態(tài)方程的一般式來使用。
那么首先假設(shè)在小波動情況下,設(shè)水輪機(jī)的初始工況點(diǎn)α=α0,n=n0,φ=φ0,H=H0;當(dāng)進(jìn)入到動態(tài)過程中時,有α=α0+Δα,n=n0+Δn,φ=φ0+Δφ,H=H0+ΔH;利用泰勒級數(shù)在初始狀態(tài)點(diǎn)進(jìn)行展開。
mt=eyy+exx+ezz+ehh
(3)
q=eqyy+eqxx+eqzz+eqhh
(4)
上面的式(3)、(4)中的各項(xiàng)系數(shù),都可以通過特征曲線上的切線斜率來求出,其中,ey表示轉(zhuǎn)矩對導(dǎo)葉開度的傳遞系數(shù),ex表示轉(zhuǎn)矩對轉(zhuǎn)速的傳遞系數(shù),ez表示轉(zhuǎn)矩對槳葉開度的傳遞系數(shù),eh表示轉(zhuǎn)矩對水頭的傳遞系數(shù),eqy表示流量對導(dǎo)葉開度的傳遞系數(shù),eqx表示流量對轉(zhuǎn)速的傳遞系數(shù),eqz表示流量對槳葉開度的傳遞系數(shù),eqh表示流量對水頭的傳遞系數(shù)。
2.2 引水系統(tǒng)的傳遞函數(shù)
對于導(dǎo)水系統(tǒng)中的剛性水擊方程和彈性水擊方程的選擇問題,在文獻(xiàn)[1]中的論述中可以發(fā)現(xiàn),在中、低水頭的水力裝置上完全可以采用剛性水擊方程。
根據(jù)文獻(xiàn)[1],對于低水頭的水輪機(jī)引水系統(tǒng)有傳遞函數(shù):
(5)
2.3 引水系統(tǒng)與水輪機(jī)的模型
利用文獻(xiàn)[4]中的方法,結(jié)合式(5)可以得到一個完整的引水與水輪機(jī)的模型,其傳遞函數(shù)的框圖結(jié)構(gòu)如圖1所示。
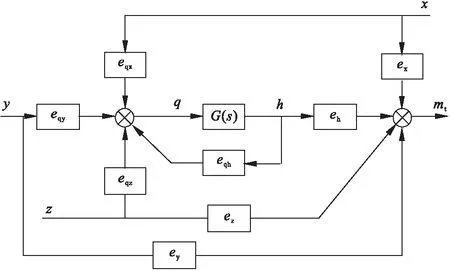
圖1 貫流轉(zhuǎn)槳式水輪機(jī)傳遞函數(shù)框圖
比較文獻(xiàn)[3]中的傳遞函數(shù)結(jié)構(gòu)框圖可以發(fā)現(xiàn),其結(jié)構(gòu)與軸流轉(zhuǎn)漿式水輪機(jī)的基本相同,差別的地方主要體現(xiàn)在參數(shù)方面,所以這也與文獻(xiàn)[1]中對貫流式水輪機(jī)的特點(diǎn)的描述相互印證,表明在數(shù)學(xué)推導(dǎo)上的正確性。
根據(jù)圖1中的傳遞函數(shù)框圖,可以得到水輪機(jī)轉(zhuǎn)矩的一個傳遞函數(shù):
exx+eyy+ezz]
(6)
將式(5)代入到式(6),然后求導(dǎo)則得到:
exx+eyy+ezz-mt]
(7)
對于發(fā)電機(jī)部分,結(jié)合參考文獻(xiàn)[3]中的方法,可以得到:
(8)
3 水輪機(jī)調(diào)速器的結(jié)構(gòu)
在工程實(shí)踐上,最常見和得到最廣泛應(yīng)用的依然是基于PID控制的水輪機(jī)調(diào)速器,以國內(nèi)的SJ-721A型微機(jī)調(diào)速器為例,對于這類調(diào)速器而言,可以發(fā)現(xiàn)雙控型的調(diào)速器一般采用導(dǎo)葉開度和槳葉角度同時調(diào)節(jié)的控制方法,槳葉角跟隨導(dǎo)葉開度變化,一般來說,對于雙控型水輪機(jī)的調(diào)速器而言,多數(shù)都采用槳葉協(xié)聯(lián)控制的方法。
3.1 槳葉協(xié)聯(lián)調(diào)節(jié)器
對于采用槳葉協(xié)聯(lián)調(diào)節(jié)方式的水力發(fā)電系統(tǒng),其各分系統(tǒng)之間的結(jié)構(gòu)如圖2所示。
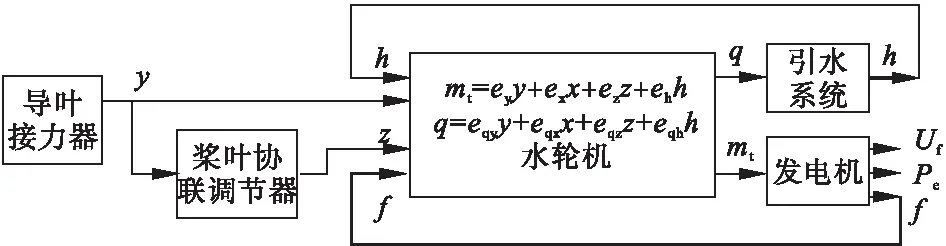
圖2 導(dǎo)葉和槳葉協(xié)聯(lián)控制方法下,水力發(fā)電系統(tǒng)結(jié)構(gòu)示意圖
3.2 接力器的傳遞函數(shù)關(guān)系
根據(jù)文獻(xiàn)[4]和文獻(xiàn)[5]可以得到槳葉協(xié)聯(lián)調(diào)節(jié)器的數(shù)學(xué)模型和導(dǎo)葉接力器的數(shù)學(xué)模型,其傳遞函數(shù)分別為:
(9)
(10)
其中(9)為導(dǎo)葉調(diào)節(jié)器的傳遞函數(shù),(10)為槳葉接力器的傳遞函數(shù)。
4 發(fā)電機(jī)與電力系統(tǒng)部分模型
對于發(fā)電機(jī)和電力系統(tǒng)部分的模型采用二階的非線性模型[6-7]:
(11)
(12)
5 控制系統(tǒng)數(shù)學(xué)模型
通過對上面的幾個部分的分析的綜合,可以得到貫流轉(zhuǎn)槳式水輪機(jī)控制系統(tǒng)的數(shù)學(xué)模型:
(13)
式中,δ、ω、Pm、y和z是控制系統(tǒng)中的五個狀態(tài)變量,依次表示發(fā)電機(jī)功角、角速度、機(jī)械功率、導(dǎo)葉接力器相對行程和槳葉相對行程。Pe為電磁功率。uy為導(dǎo)葉開度控制信號。TJ、Tw則分別表示轉(zhuǎn)子慣性時間常數(shù)和水流慣性時間常數(shù)。
通過文獻(xiàn)[3,8-9]中所提到的方法可以得到相應(yīng)的一個非線性控制律。
6 仿真結(jié)果
本文中的貫流轉(zhuǎn)槳式水輪機(jī)選定了GZ990型;其中的參數(shù)根據(jù)相應(yīng)水輪機(jī)的特征曲線依次為:
初始狀態(tài)參數(shù):Per=1,yr=0.79,ωr=1參數(shù)均為標(biāo)幺值。
對仿真模型進(jìn)行三相短路擾動的MATLAB仿真,對比多指標(biāo)非線性協(xié)調(diào)控制方法和傳統(tǒng)PID控制面對擾動的穩(wěn)定性。對兩種控制方法在擾動中的頻率變化Δω,功率變化ΔPe和功角變化Δδ進(jìn)行對比,其仿真圖如圖3(a)~(c)所示:其中黑色虛線表示多指標(biāo)非線性控制方法下的波形,粉色實(shí)線表示的是PID控制方法下的波形;圖3(a)~(c)表示的依次為頻率變化Δω,功率變化ΔPe和功角變化Δδ。
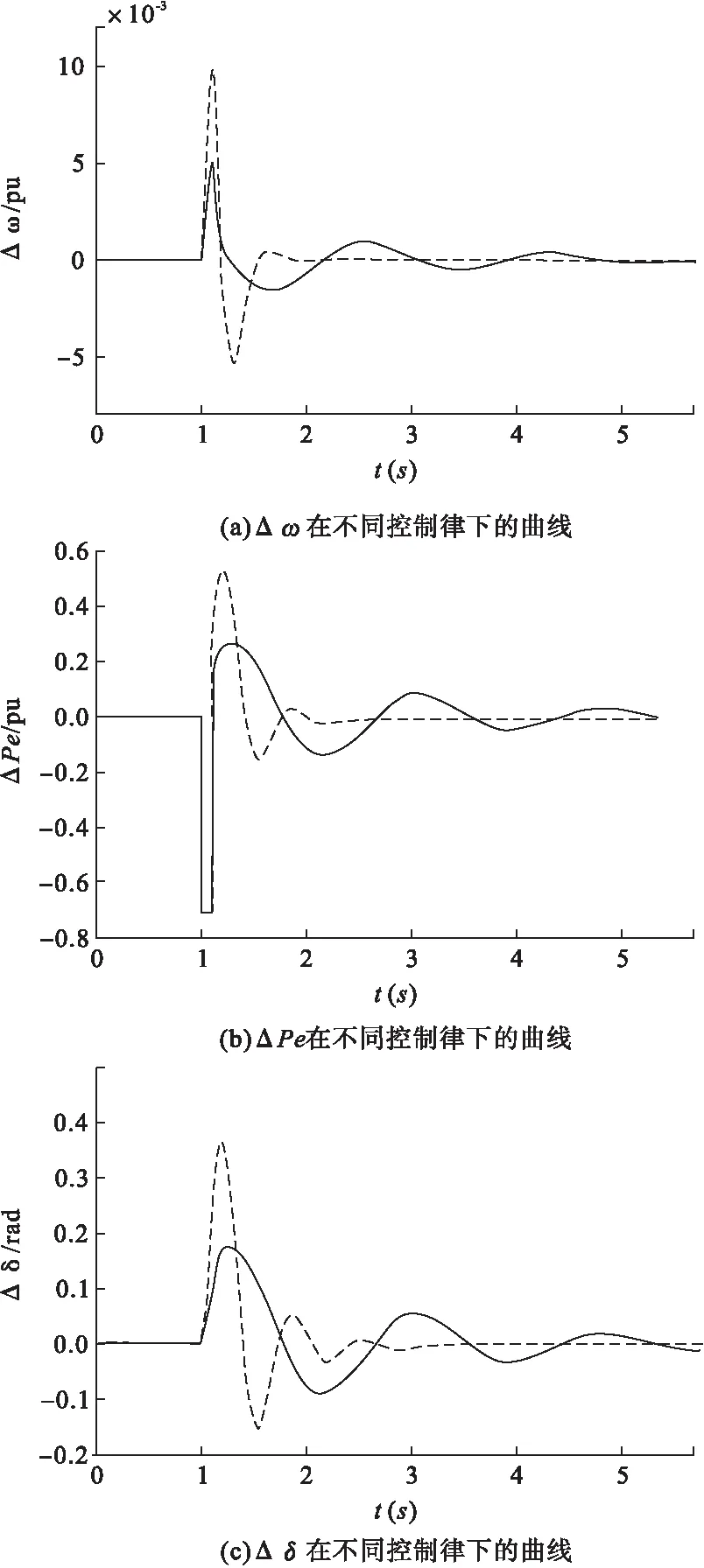
圖3 三相短路擾動仿真圖像
在1s時,發(fā)生三相短路事故,在0.1s后故障被切除,重合閘裝置動作,發(fā)電機(jī)組重新投入系統(tǒng)工作。通過圖3可以發(fā)現(xiàn):非線性控制方法使發(fā)電系統(tǒng)恢復(fù)穩(wěn)定狀態(tài)的能力要強(qiáng)于傳統(tǒng)PID控制。采用了非線性控制后,在相同的仿真模型下,恢復(fù)穩(wěn)定運(yùn)行狀態(tài)的速度更快。從圖3(a)中可以發(fā)現(xiàn)頻率變化Δω采用非線性控制方法后在2s后就基本穩(wěn)定,而采用PID控制方法在5s后仍然有波動存在。圖3(b)中對于功率變化ΔPe而言,采用非線性控制后,其波形在2s后基本穩(wěn)定,而PID控制則在5s后仍有波動。圖3(c)里可以發(fā)現(xiàn)功角變化Δδ采用非線性控制時,在3s后系統(tǒng)恢復(fù)穩(wěn)定,而采用PID控制則至少5s后才能恢復(fù)穩(wěn)定。
7 結(jié)論
從上面的仿真實(shí)驗(yàn)結(jié)果來看,一方面說明了這種非線性控制的優(yōu)點(diǎn);另一方面則說明,采用傳統(tǒng)的傳遞系數(shù)方法,如果可以得到相應(yīng)型號貫流轉(zhuǎn)槳式水輪機(jī)的特征曲線的話,那么依然可以使用這種方法來構(gòu)建適合的模型用在小波動情況下的水力發(fā)電系統(tǒng)仿真,驗(yàn)證了這種建模方法完全可以用在貫流轉(zhuǎn)槳式水輪機(jī)上。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
