武術(shù)擂臺機器人的研制與實踐
2018-03-02 12:22:12朱思宇劉剛瞿志二吐魯遜江·克熱木
數(shù)字技術(shù)與應(yīng)用 2018年12期
朱思宇 劉剛 瞿志二 吐魯遜江·克熱木


摘要:本文針對中國機器人大賽中武術(shù)擂臺機器人比賽規(guī)則,設(shè)計并制作出武術(shù)擂臺機器人硬件系統(tǒng),探索出一種攻防兼?zhèn)涞目刂撇呗裕瑢崙?zhàn)證明該方案達到了預期的目標。
關(guān)鍵詞:機器人;STM32;邊緣檢測
中圖分類號:TP242 文獻標識碼:A 文章編號:1007-9416(2018)12-0039-02
0 引言
武術(shù)擂臺賽是中國機器人大賽中參賽隊最多、競爭最激烈、最富有觀賞性的賽事:兩個具有自主行動的機器人在2.4m×2.4m的擂臺上,通過傳感器來辨別自身方位的同時,并感知對手的位置、方向,然后開展攻擊的對抗性機器人競賽。在設(shè)計、制造、訓練、比賽一系列過程中,參賽者的綜合工程素質(zhì)、創(chuàng)新能力、動手能力、團隊協(xié)作能力都能得到全面的培養(yǎng)和提升。
本文重點研究了機器人硬件系統(tǒng)及競賽策略。
1 機器人主要硬件系統(tǒng)設(shè)計
1.1 系統(tǒng)設(shè)計與組成
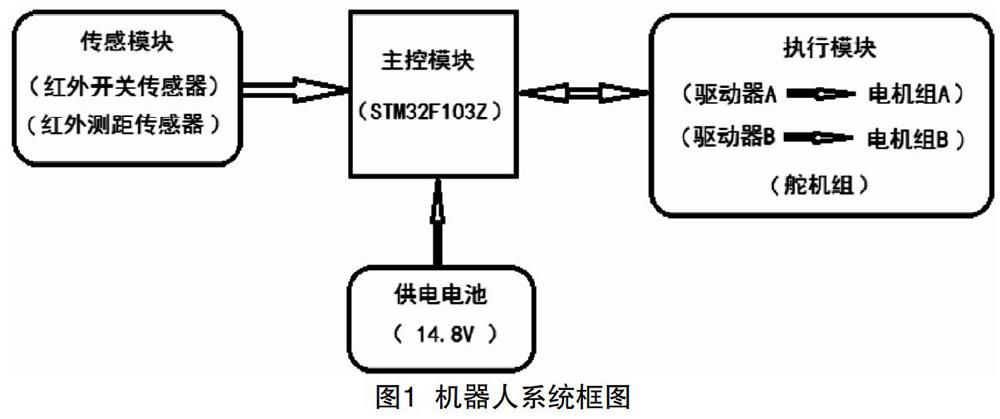
為了適應(yīng)競賽要求增強機器人的上臺能力機器人采用前高后低設(shè)計結(jié)構(gòu),其底板外形尺寸為260mm*250mm的長方形,底板距離地面高度前面35mm,后面25mm;總體系統(tǒng)設(shè)計共采用了四輪差速方案,由8個紅外開關(guān)傳感器、4個紅外測距傳感器組成;執(zhí)行模塊由4個舵機和4個直流電機構(gòu)成,直流電機型號為BDMC1203驅(qū)動,14.8V/3A鋰電池供電;主控模塊選用以STM32F103Z為核心的Luby控制器。
如圖1所示,機器人硬件系統(tǒng)由主控模塊、傳感模塊、執(zhí)行模塊和供電電池四部分組成。
1.2 主控模塊
機器人采用STM32F103Z核心芯片為主控板,STM32F103Z是一種低功耗控制器,豐富的IO接口,方便擴展可實現(xiàn)各個模塊的功能要求。
1.3 傳感模塊
傳感器模塊由8個紅外光電傳感器和4個紅外測距傳感器組成:底板下面正前、后、左、右,及頂部左前、右前、右后、左后各一個紅外開關(guān)傳感器;底板下面、前、后、左、右各一個紅外測距傳感器。
紅外開關(guān)傳感器利用了障礙物對光束的漫反射作用,通過同步回路電路接通,從而檢測物體的有無障礙物。
紅外測距傳感器是測量障礙物到傳感器接收探頭的間距。所采用的GP2D12由紅外發(fā)射端、PSD(位置敏感檢測裝置)及相關(guān)處理電路構(gòu)成,輸出為0~2.5V的模擬量(電壓、距離相關(guān)),量程范圍10~80cm。
1.4 執(zhí)行模塊
由4個直流電機,2個BDMC1203驅(qū)動器組成的四輪差動設(shè)計方案。四路直流電機分別安裝于底盤的左右兩側(cè),每組兩個,電機的取值決定轉(zhuǎn)速,取值越大,轉(zhuǎn)速越快。
2 攻防策略應(yīng)用
策略是機器人的靈魂,是武術(shù)擂臺機器人參賽獲勝的關(guān)鍵。核心問題有:首先是機器人盡快完成自主登臺,其次是防止自身掉臺,且防止自身掉臺的優(yōu)先級高于檢測敵方機器人。
2.1 自主登臺
常見登臺方式有兩種,一種是利用機器人高速沖擊慣性使機器人沖上擂臺,這種方式對于車上的傳感器、自身結(jié)構(gòu)損傷加大,對于電機的驅(qū)動要求較高,且不穩(wěn)定;另一種如圖2所示是在機器人車體上增加適當機械結(jié)構(gòu),安裝舵機,依靠機械結(jié)構(gòu)完成自主登臺,這種登臺方式較容易實現(xiàn),容易控制,被廣泛采納。
2.2 檢測機器人是否在擂臺上
利用前后左右四個測距傳感器綜合判斷是否位于臺上。在擂臺下時,首先要檢測機器人朝向。以前方對擂臺為例:此時前方底部傳感器檢測到擂臺,其他均未檢測到擂臺。機器人是否在擂臺上的流程如圖2所示:
2.3 邊緣檢測
如前、后、左、右4個光電開關(guān)中,3個檢測到擂臺,1個未檢測到時,表明在該方向機器人繼續(xù)前進時可能會掉臺。需要采取遠離擂臺邊緣的措施。以左前方擂臺邊緣檢測為例,流程圖如圖3所示:
2.4 敵方檢測
敵方探測利用機器人底部正前、后、左、右的四個紅外開關(guān)傳感及相對應(yīng)的紅外距離傳感器合作完成。例如當正前方檢測到敵方機器人時,正前方光電開關(guān)傳感器滅,此時我方機器人加速向前推進直至敵方機器人落臺(但同時還應(yīng)防止自身同時掉臺);當左側(cè)檢測到敵方機器人時,左側(cè)光電開關(guān)傳感器滅,我方機器人需左轉(zhuǎn),此時敵方機器人相當于由左方回到正前方,我方機器人直接加速向前推進即可。
3 結(jié)語
本文較全面研究了武術(shù)擂臺大賽用機器人的設(shè)計及策略。在老師的指導下,利用該機器人參加競賽獲得了良好的比賽成績。說明該設(shè)計是合理的。
參考文獻
[1]黨金哲,高晶敏,李明慧.一種基于AVR單片機控制的武術(shù)擂臺機器人設(shè)計[J].傳感器世界,2018(06):22-28.
[2]趙磊,李衛(wèi)國,王利利.新型非標準平臺武術(shù)擂臺機器人的研究與實踐[J].機械管理開發(fā),2016(7):9-10.
[3]王鑫,許曉飛,靳宸.武術(shù)擂臺賽機器人自主登臺方案設(shè)計[J].電子技術(shù)設(shè)計與應(yīng)用,2016(10):69-70.
[4]王擇,李響,胡金鑫,王浩冉,李鑫,劉賽賽.用于武術(shù)擂臺賽的仿人智能機器人設(shè)計[J].現(xiàn)代計算機(專業(yè)版),2016,(19):54-58.
Analysis and Practice of WUSHU Arena Robot
ZHU Si-yu,LIU Gang,QU Zhi-er,TULU Xun-jiang·Ke Re-mu
(School of Instrument Science and Optoelectronic Engineering, Beijing Information Science & Technology University,Beijing 100192)
Abstract:Based on competition rules of WUSHU Arena Robot at China Robot Competition, this thesis designed and manufactured a kind of robot hardware system and explored out a control strategy equally good at attack and defense, which get the expected target proved by actual combat.
Key words:robot;STM 32;edge detection
