基于MEMS傳感器的物流車輛位置及姿態追溯系統設計
2018-03-02 17:34:48王志偉許江淳李玉惠張云史鵬坤
軟件 2017年9期
王志偉+許江淳+李玉惠+張云+史鵬坤

摘要:為了解決物流響應慢,貨物在倉庫中丟失,以及車輛在運輸貨物途中出現事故等問題,研究了一種基于嵌入式的物流跟蹤及車輛姿態檢測系統。該系統通過車載平臺與物流中心聯網對車輛實時狀況分析并進行預處理,在物流運輸過程中能夠實現物流實時跟蹤。在實際應用中,該系統能夠對貨物的位置進行實時確認,并在數據中心可以接收到車輛是否出現故障或車輛姿態信息,在車輛故障和姿態異常時發出預警信息。
關鍵詞:物流跟蹤;姿態檢測;姿態異常;預警信息
0 引言
隨著近些年來物流產業的蓬勃發展,人們對處于運輸過程中貨物的狀況關注度逐漸增強。物流管理系統便應運而生,物流管理系統不僅能夠提高整個物流產業的發展起到推進作用,并且能夠為客戶實時的提供貨物的具體狀況。在物流管理的過程中,貨物在運輸過程中的狀態是人們關注的焦點,因此如何能夠更好的直接了解到運輸過程中車輛、駕駛員以及貨物的整體狀態信息成為了關鍵。現代物流系統要求能夠對上述信息集成在一個綜合系統中,并且希望系統能夠在控制成本方面做出一定的貢獻。當然整個運輸過程中運輸車輛常常會出現故障或者車禍情況,此時如果調度中心對車輛位置及車輛狀態信息進行了及時了解,就能提高貨物的運輸能力,并帶來更好的客戶體驗。
本文應用嵌入式技術,分別從車載平臺,數據中心,和客戶端三個部分對該系統進行設計。車載平臺應用嵌入式技術,通過MPU-6050模塊采集車輛的姿態信息并通過SIM908模塊采集車輛的位置信息,通過GPRS實現車載平臺與數據中心之間的數據傳輸。數據中心不僅能夠實現對車輛信息和所載貨物信息的查詢功能,分別實現了與車載平臺的信息交互,顯示車輛的地圖位置。客戶端通過INTERNET網絡實現與數據中心的數據讀寫功能,查詢客戶所托貨物的運輸信息。
1 系統設計
整個物流車輛位置及姿態檢測系統可以劃分為三個主要的部分:車載終端、數據分析中心、客戶端。三個部分之間的整體關系示意圖如圖l所示:
根據當今物流系統的發展需要三個部分的功能需求也各有不同。對車載終端主要實現的功能就是能夠及時的發送出車輛位置,以及車輛的運行狀態以及駕駛員對車輛是否有違規操作。是否延誤貨物的裝車或者卸載。以及駕駛員在運輸貨物的過程中是否存在違反交通規則。最重要的是在車輛在運輸過程中是否出現故障或者事故,以及準確判斷車輛姿態和駕駛員的狀況。在駕駛員無法自行解決故障的時能夠通過終端將信息反饋回控制中心。并由控制中心給出規劃后合理的方案,當事故發生時的數據超出設定的安全范圍時系統判定駕駛員無自救能力,車載平臺會自動向數據中心發送報警信息以保證駕駛員和客戶財產的安全。
客戶端是提供給物流客戶使用的查詢系統。客戶通過自己賬戶和密碼登錄系統后能夠查詢自己的貨物在整個發送過程中細節問題,包括運輸過程中貨物所處的位置,負責運貨的車型和駕駛員信息以及運輸車輛的其他信息。
數據中心通過查詢功能可以訪問處于運輸過程中的車輛和駕駛員的位置信息、運行狀態以及接收來自車載平臺發送來的信息。運輸過程中一旦車載平臺主動發送數據到數據中心,數據中心會快速的接收信息并對接收到的數據進行分析,辨別是系統白動反饋回來的信息還是車輛發生故障時駕駛員通過手動的方式向系統發送的異常信息。并根據信號源迅速判斷車輛所在位置,同時從接收信號之后十秒鐘之內的車輛姿態信息。
2 系統硬件設計
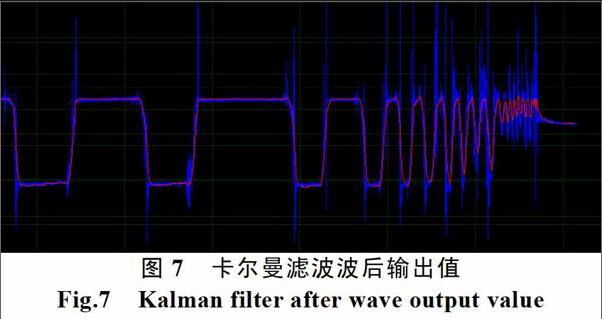
該系統是以三星S3C6410微處理器為核心的開發板進行開發。如圖2所示,該系統通過GPS對車輛進行實時定位,這樣在車輛發生故障時方便救援。狀態檢測模塊中主要用的是MPU-6050.MPU-6050集成了三軸陀螺儀和三軸加速度計,可以準確地測量出車輛當前的姿態和行駛速度。條形碼掃描裝置用的是市面上常見的電子掃碼槍。
3 車輛姿態檢測方案設計
3.1 車輛姿態檢測方法選擇
陀螺儀和加速度計波形如圖3波形圖。由圖3可以看出波形不夠平滑,噪聲較大。故而需要數據融合算法對兩種數據進行融合。
從圖3看出,由于單個傳感器的輸出值出現很尖銳的地方,會對整個系統造成影響。為了提升對車輛姿態判斷的準確性需要對獲得數據進行一定的處理。在數據處理方面通常可以很容易的想到加權平均法因為這種方法在數據處理中實現起來比較簡單,并且運算量并不是很大,但是其在精度方面存在很大缺陷。車載平臺在運行過程中不僅需要很好的靈敏性并且在數據精度比較高,一旦出錯后果無法挽回。因此這種方法并不適合該系統。另外一種就是神經網絡法,這種方法的自學習能力很強,但是由于其建模過程以及參數的確定和優化對于本系統來說太過于復雜,并不適合本系統。因此在本系統中采用了卡爾曼濾波來進行數據融合來獲得精度更高的數據。實現方式是通過計算機軟件中的虛擬示波器采用互補濾波的方式來對陀螺儀和加速度計的輸出數據進行處理。所得曲線,如圖4所示:
由4圖可知,互補濾波算法曲線很不規則,且有些許漂移。因此需要對數據進行進一步的處理,這里應用的卡爾曼濾波的方法對傳感器輸出數據進行處理。
3.2卡爾曼濾波器基本原理
卡爾曼濾波器通常用來處理時間離散控制過程的問題。在使用之前首先要定義模型線性隨機微分方程。在這一步驟中首先假設卡爾曼濾波模型k時刻真實狀態是通過(k-l)時刻的狀態推算出來,推算過程如式(1)所示:
在公式(1)中,Xk代表的含義為k時刻狀態;A是k-l時刻狀態變換模型;B是作用在控制器向量Xk上的輸入控制模型;Wk是過程中產生的噪聲,假設整個過程中的平均噪聲值為0,協方差矩陣Qk的特征符合多元正態分布:則與K時刻的真實狀態相對應的Zk測量滿足式子:
式(3)中Hk是能夠把真實的控制映射到觀測空間的觀測模型;Xk是平均值為0的觀測噪聲,協方差矩陣Rk符合正態分布,其描述如式4所示:endprint
在整個過程中可以認為任意時刻的噪聲與其他時刻的噪聲是互相獨立的。
卡爾曼濾波器在數據處理的過程中可以分為兩個階段:分別是預估階段和更新階段。在預估階段卡爾曼濾波器主要完成的任務是通過上一時刻狀態來估算出當前時刻的狀態;在更新階段主要根據觀測值對預估階段的數據優化,從而可以獲得一個比預估階段更準確的新估計值。
卡爾曼濾波器迭代過程如下:
(1)先驗狀態估計:
(2)先驗估計誤差協方差:
(3)卡爾曼增益:
(4)后驗狀態估計:
(5)后驗誤差協方差:
在式(5)至式(9)中,各個參數代表的含義為:
A:作用在Xk-l上的n階矩陣;
B:作用在控制向量Uk-1上的nxl輸入控制矩陣;
H: mxn觀測模型矩陣,將真實狀態空間映射為觀測空間;
Pk/k-l先驗估計誤差協方差矩陣;
Pk: nxn后驗估計誤差協方差矩陣;
Q: nxn過程噪聲協方差矩陣;
R: mxm過程噪聲協方差矩陣;
I:n階單位矩陣;
kk: nxm矩陣,稱之為卡爾曼增益。
3.3 卡爾曼濾波器設計
根據上面對卡爾曼濾波過程的分析可以看出卡爾曼濾波器是一種高效率白回歸濾波器。卡爾曼濾波器的工作流程如圖5所示。
由于陀螺儀和加速度計的輸出都模擬量因此需要通過ARM芯片中的A/D模塊對其進行模數轉換除此之外還要對兩者的輸出值進行轉換。陀螺儀輸出電壓與角速度轉換如式(10)所示:
式中:G系統中陀螺儀檢測到的角速度;Vout為陀螺儀輸出電壓;Voffest為處在靜止狀態時陀螺儀的輸出電壓;Vsen為陀螺儀靈敏度;K為放大電路放大系數。加速度計輸出值的變換如式( 11)所示:式中:A為檢測到的重力加速度;Vout為加速度計輸H{電壓;Voffest為平衡位置的輸出電壓;Vsen為加速度計靈敏度。利用反三角函數求Jq』與重力方向的傾角。
為統一單位可以通過式( 12)將弧度換算得出角度。式子(13)為系統雅克比矩陣:
通過上面的分析之后可以對系統的預測協方差矩陣P進行計算了。另外計算出估計值和預測值之間存在的誤差。得出卡爾曼增益K O和K l,K O是最優估計值時的增益,K l用來計算最優估計值的偏差。根據計算得到的最優估計值和預測值偏差,就可以計算出最優角度值angle和最佳的角速度值。
3.4實驗驗證
在實驗過程中可以看出單一的加速度計或者只通過陀螺儀不能夠很好的獲得良好的數據,因此一定要對數據進行相關的處理。在探索合理的數據處理方法時做了下面的實驗驗證。選用盒子來模擬車輛對相關內容進行實驗。在紙盒子的軸中心處安裝MPU-6050模塊。在圖6中標出了車體坐標軸,由于拍攝圖片的二維特性所以在圖中Y軸標在了坐標軸原點處。此次實驗的姿態是針對汽車模型當前所處的姿態,根據圖6可以得到當前車輛模型與地面夾角應當為-30°。
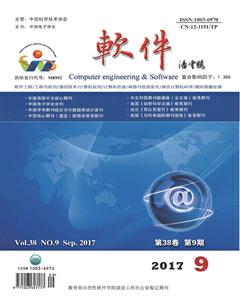
然后將該裝置連接到計算機上,來驗證卡爾曼濾波器是否滿足本系統設計。通過示波器觀察其輸出波形,如圖7所示。可以看出比互補濾波算法有所改進。
4 結語
本系統通過對主要功能的研究與測試,實現了對貨物信息在車載平臺上的記錄,通過對車輛定位功能的實現間接對貨物的位置進行確認。通過加速度計和陀螺儀對車輛姿態信息采集,并經過數據融合算法處理之后,在實物仿真的情況下卡爾曼濾波算法能夠滿足本系統的設計。endprint